A Monte Carlo Method to Evaluate Electric Vehicles
Impacts in Distribution Networks
F. J. Soares*, Student Member, IEEE, J. A. Peças Lopes*, Senior Member, IEEE, P. M. Rocha Almeida*, Student Member,
IEEE
* The authors are with Instituto de Engenharia de Sistemas e Computadores do Porto (INESC Porto) and with the MIT
Portugal Program on Sustainable Energy Systems from Faculdade de Engenharia da Universidade do Porto (FEUP);
Address: Rua Dr. Roberto Frias, 378, 4200 - 465 Porto, Portugal; Tel.: +351 222 094 000;
E-mails: fsoares@inescporto.pt, jpl@fe.up.pt, pedro.almeida@fe.up.pt
The example of a small grid from one of the Azores islands,
Flores Island, was used for illustration purposes and two
scenarios of EV integration were simulated: 25% and 50%
of the current light vehicles fleet replaced by EV.
After gathering all the results, an evaluation was made to
identify the most problematic zones of the network,
concerning voltages and lines loading violations.
Abstract—This paper describes a statistical approach
developed for assessing the impacts resulting from EV
presence in a given electricity network was developed. The
algorithm, developed for this purpose, is based on a Monte
Carlo method and can be seen as a planning tool that
allows obtaining average values for several system indexes,
like buses voltages, branches loading and energy losses.
Additionally, it also allows identifying the most critical
operation scenarios and the network components that are
subjected to more demanding conditions and that might
need to be upgraded. The example of a small grid from one
of the Azores islands, Flores Island, was used for
illustration purposes and two scenarios of EV integration
were considered: 25% and 50% of the current light vehicles
fleet replaced by EV.
2. FLORES ISLAND NETWORK
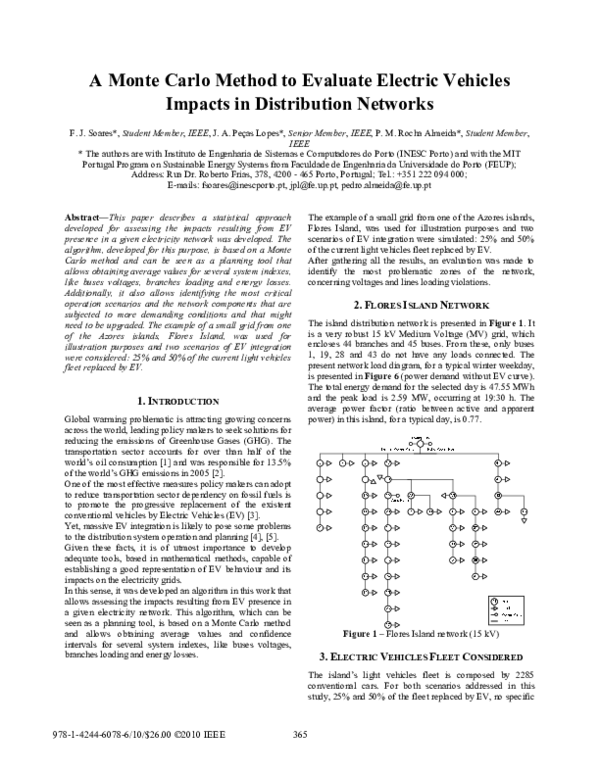
The island distribution network is presented in Figure 1. It
is a very robust 15 kV Medium Voltage (MV) grid, which
encloses 44 branches and 45 buses. From these, only buses
1, 19, 28 and 43 do not have any loads connected. The
present network load diagram, for a typical winter weekday,
is presented in Figure 6 (power demand without EV curve).
The total energy demand for the selected day is 47.55 MWh
and the peak load is 2.59 MW, occurring at 19:30 h. The
average power factor (ratio between active and apparent
power) in this island, for a typical day, is 0.77.
1. INTRODUCTION
Global warming problematic is attracting growing concerns
across the world, leading policy makers to seek solutions for
reducing the emissions of Greenhouse Gases (GHG). The
transportation sector accounts for over than half of the
world’s oil consumption [1] and was responsible for 13.5%
of the world’s GHG emissions in 2005 [2].
One of the most effective measures policy makers can adopt
to reduce transportation sector dependency on fossil fuels is
to promote the progressive replacement of the existent
conventional vehicles by Electric Vehicles (EV) [3].
Yet, massive EV integration is likely to pose some problems
to the distribution system operation and planning [4], [5].
Given these facts, it is of utmost importance to develop
adequate tools, based in mathematical methods, capable of
establishing a good representation of EV behaviour and its
impacts on the electricity grids.
In this sense, it was developed an algorithm in this work that
allows assessing the impacts resulting from EV presence in
a given electricity network. This algorithm, which can be
seen as a planning tool, is based on a Monte Carlo method
and allows obtaining average values and confidence
intervals for several system indexes, like buses voltages,
branches loading and energy losses.
Figure 1 – Flores Island network (15 kV)
3. ELECTRIC VEHICLES FLEET CONSIDERED
The island’s light vehicles fleet is composed by 2285
conventional cars. For both scenarios addressed in this
study, 25% and 50% of the fleet replaced by EV, no specific
978-1-4244-6078-6/10/$26.00 ©2010 IEEE
365
�types of EV were considered. In order to tackle the
uncertainties related with the type of EV that the islands’
inhabitants would prefer to use, Gaussian probability
density functions were used to initially characterize all the
relevant variables related with each EV. This procedure will
be thoroughly described later on this document.
•
4. ELECTRIC VEHICLES MOTION SIMULATION
•
The EV movement along one day was simulated using a
discrete-time non-Markovian process to define the states of
all the EV at each 30 minutes interval (48 time instants). In
this process it is assumed that each EV can be in four
different states: in movement, parked in industrial area,
parked in commercial area or parked in residential area.
Initially, a state is drawn for each EV, based on the
probabilities for time instant = (hour 0 of Figure 3).
The EV states for the following time instants, between 1 and
47, are defined according to the probabilities specified for
each one of those time instants (see Figure 3) and according
to the referred discrete-time non-Markovian process, which
is represented in detail in Figure 2. As it is denoted in this
figure, there are some restrictions when defining the EV
states for the following time instant. While EV in movement
can keep their state or change it for one of the others, parked
EV can only remain in the same state or change to
movement. This process is classified as non-Markovian for
the reason that the state transition probabilities are not a
constant function, varying with time.
=
=
→
=
→
=
→
=
→
=
→
=
•
•
•
The state transition probabilities applied in this study were
determined by analyzing the common traffic patterns of
Portuguese drivers. From [6] it was gathered information
about the number of car journeys made per each 30 minutes
interval, along a typical weekday, as well as the journey
purpose and its average duration. With this data, it was
possible to define the probabilities of an EV reside in a
given state at a given time instant. The overall probabilities
obtained are presented in Figure 3.
=
1
"Movement" State
"Parked in industrial area" State
"Parked in commercial area" State
=
→
=
"Parked in residential area" State
0.6
0.4
0.2
=
=
=
•
0.8
=
→
=
→
=
=
=
•
State transition probabilities
=
time instant t;
– probability of changing from “parked in
→
industrial area” to “in movement” state, at time
instant t;
– probability of changing from “in
→
movement” to “parked in commercial area” state,
at time instant t;
– probability of changing from “parked in
→
commercial area” to “in movement” state, at time
instant t;
– probability of remaining in “parked in
industrial area” state, at time instant t;
– probability of remaining in “parked in
commercial area” state, at time instant t;
= – probability of remaining in “parked in
residential area” state, at time instant t;
– represents the time instants between 1 and 47
(varies between 2 and 46);
– represents the last time instant of the day
(n = 7).
•
=
=
0
0
5
10
15
20
Hour
Figure 2 – Discrete-time non-Markovian process
Figure 3 – State transition probabilities along a typical
weekday
The acronyms of Figure 2 are defined next:
•
– probability of remaining in “in movement”
state, at time instant ;
– probability of changing from “in
•
→
movement” to “parked in residential area” state, at
time instant t;
•
– probability of changing from “parked in
→
residential area” to “in movement” state, at time
instant t;
•
– probability of changing from “in
→
movement” to “parked in industrial area” state, at
After defining the EV states, it was needed to determine
where in the network each EV was located. If an EV was in
movement, there was no need to define its location.
However, if parked and connected to the grid for charging
purposes, it was crucial to know the EV location to allocate
its load to a specific network bus.
The procedure adopted to solve this issue was to consider
the real nature of the loads connected to each network bus.
Thus, all the existing loads were classified as industrial,
commercial or residential. As examples, the 400 kW load
366
�are defined according with the probabilities presented in
Figure 3 and Figure 4, respectively.
installed at bus 25 is 35% commercial and 65% residential,
while at bus 10 there is a load of 315 kW, 100% industrial.
Having defined the type of loads located at each bus, using
equations (1), (2) and (3), it was calculated the probability
of an EV be located at a specific bus. For instance, if an EV
state at time instant is “parked in a residential area”, a bus
location will be drawn and assigned to it, according with a
probability distribution proportional to the residential load
installed in each bus. The same happens for the “parked in
industrial area” and “parked in commercial area” states.
=
where:
•
•
•
=
Draw EV states and the buses where “parked” EV are located, for the next time
instant
Update EV batteries SOC
EV charge
only when
it needs
(2)
∑
EV battery SOC < 30% ?
EV charge
whenever
possible
No
(3)
EV is parked in
residential area ?
– probability of an EV be located in bus i, if
parked in residential/industrial/commercial area;
/ /
– residential/industrial/commercial load
installed in bus i;
/ /
∑
– network total residential/industrial/
commercial load.
No
EV arrived home from the
last journey of the day ?
Yes
Yes
No
Yes
/ /
No
EV is parked in
residential area ?
Yes
∑
EV charge at the
end of the day or
whenever is
convenient and the
driver has time
What is the EV driver behaviour ?
(1)
∑
EV do not charge
Sample generation and evaluation
=
Define EV initial conditions (initial state, bus, battery capacity, slow charging rated
power, initial SOC, energy consumption and driver behaviour)
EV starts charging
No
Determine the new load at each bus
Power flow analysis
The allocation probabilities of each bus, for each EV state,
are presented in Figure 4.
No
End of the day was reached ?
Yes
"Parked in industrial area" State
"Parked in commercial area" State
"Parked in residential area" State
0.4
Indexes
update
0.45
Update of grid technical indexes and vehicle usage indicators in a hourly and daily
basis
Bus allocation probabilities
0.35
Monte Carlo finishing criteria was met ?
0.3
Yes
0.25
Compile results: power demand, voltages, branches loading, energy losses, peak
power, number of voltage and branches ratings violations
0.2
Figure 5 – Monte Carlo algorithm flowchart
0.15
The EV battery capacity, slow charging power, energy
consumption and initial battery SOC are defined according
with Gaussian probability density functions, whose average,
standard deviation, maximum and minimum values allowed
are presented in Table I.
0.1
0.05
0
5
10
15
20
25
30
35
40
45
Bus
Figure 4 – Buses allocation probabilities for “parked” EV
states
TABLE I
GAUSSIAN DISTRIBUTIONS FOR INITIAL EV CHARACTERIZATION
5. MONTE CARLO ALGORITHM
5.1. Samples Generation with Monte Carlo
Battery capacity (kWh)
Slow charging rated power
(kW)
Energy consumption
(kWh/km)
The flowchart of the Monte Carlo algorithm developed in
this work is presented in Figure 5.
The first step of the algorithm is to make the initial
characterization of all the EV, concerning their initial state
(in movement, parked in industrial area, parked in
commercial area or parked in residential area), the bus they
are initially located, battery capacity (kWh), slow charging
rated power (kW), initial State Of Charge (SOC) (%), their
energy consumption (kWh/km) and their owners’ behaviour.
As mentioned above, the EV initial state and location bus
Initial battery SOC (%)
Average
Standard
deviation
Maximum
value
allowed
Minimum
value allowed
24.73
17.19
85.00
5.00
3.54
1.48
10.00
2.00
0.18
0.12
0.85
0.09
50.00
25.00
85.00
15.00
While the initial battery SOC values were assumed for the
purpose of this work, the values for battery capacity, slow
charging rated power and energy consumption were
obtained from the information made available on the
Internet by the manufacturers of 42 different EV. In [7]-[13]
367
�The fast charging was assumed to be made during 15
minutes with a power of 40 kW [15]. The fast charging
station was considered to be installed in bus 12, as this is
located near one of the more populated areas of the island,
with a high number of potential clients.
The average of the Gaussian distribution used to
characterize the travelled distance in common journeys was
obtained by dividing the average daily mileage in Portugal
(35 km) [16] by the average number of journeys per day
(3.88 journeys) [6]. The standard deviation of this Gaussian
distribution was considered to be 50% of the average.
The values of the Gaussian distribution used for the
travelled distance to the fast charging station, were obtained
by assuming that they were 50% of those used in the
travelled distance in common journeys distribution.
At each time instant, the EV battery SOC is updated
according with the energy spent travelling or with the
energy absorbed in residential slow charging or fast
charging stations. It is important to stress that, in this work,
EV were only allowed to charge when their state was
“parked residential area”.
Having the EV power consumption fully defined, together
with the network initial load, it is obtained the total amount
of power required from the network, decriminalized per bus
and per time instant.
are presented some of the Internet sites from where the EV
characteristics were obtained. The maximum and minimum
values allowed, presented in Table I, were used to confine
the values drawn for each EV within realistic boundaries.
As mentioned previously, a given driver behaviour was also
assigned initially to each EV. The different behaviours
considered in this study were defined according with the
findings of an Internet survey made within the framework of
the MERGE project [14]. The results revealed that there are
four major types of behaviours regarding EV charging, as
presented in Table II.
TABLE II
DRIVERS’ BEHAVIOURS CONSIDERED [14]
Percentage of the
responses
EV charge at the end of the day
33%
EV charge only when it needs
23%
EV charge whenever possible
20%
EV charge whenever is convenient and the driver has time
24%
For the purpose of this work, regarding the behaviours
modelling and simulation, there was no relevant differences
between the drivers that “charge at the end of the day” and
those who “charge whenever is convenient and they have
time”. Therefore, the EV to which one of these drivers’
behaviours was assigned, were assumed to behave equally
along the simulations.
For the drivers who charge their EV only when it needs, it
was assumed that the minimum battery SOC that triggers
the need for charging was 30%.
The next step of the Monte Carlo algorithm was to simulate
EV movement along one typical weekday. To start with, the
EV states for each time instant were defined according with
the discrete-time non-Marvovian process described in
section 4. and with the probabilities presented in Figure 3.
After, for each time instant, a bus location was attributed to
parked EV, as explained in section 4. and according with the
probabilities presented in Figure 4. For the EV in
movement, a procedure was developed to account their
energy consumption and the respective reduction in the
battery SOC. First a Gaussian probability density function
was used to draw the travelled distances for all the EV in
movement. Therefore, if an EV was in movement in time
instant
and its battery SOC went below a predefined
threshold (assumed to be 15%) in time instant
, it was
considered that the EV would make a short detour to a fast
charging station for recharging purposes. The travelled
distance during the detour was obtained using also a
Gaussian probability density function, whose parameters are
presented in Table III.
5.2. Samples Evaluation
The evaluation of the samples is made by running a power
flow for each time instant, using the PSS/E software, being
gathered information about the voltage profiles, the power
flows in the lines and the global value of the energy losses
in the network.
During the simulation, the average, maximum and minimum
power demand and voltage value is recorded for each bus of
the system. A similar procedure is adopted for the power
flows in the lines.
The scenario where the highest peak load occurs is also
recorded, in order to provide an idea of the worst situation
that might occur when 25% and 50% of the conventional
vehicles are replaced by EV.
In order to keep track of the most problematic buses and
lines within the grid, the number of out of limit voltages and
lines loading occurrences are recorded along the
simulations. According with [17], voltages must be kept
with the interval 0.90 – 1.10 p.u. during 95% of the time, in
a weekly basis. A security margin of 0.03 p.u. was assumed
in this work, being considered voltage violations all the
values outside the interval 0.93 – 1.07 p.u..
5.3. Terminating the Monte Carlo Process
To terminate the Monte Carlo process, two criteria were
used: number of iterations and the variances of the
aggregated network load of each one of the 48 time instants.
The process was set to perform 10000 iterations and check,
in the end, if the variation of the 48 variances in the last 10
iterations was lower than
. If at least one of the 48
variances did not meet this convergence criterion, the
process was kept running more iterations until all the
TABLE III
GAUSSIAN DISTRIBUTIONS FOR EV MOVEMENT CHARACTERIZATION
Travelled distance in
common journeys (km)
Travelled distance to fast
charging station (km)
Average
Standard
deviation
Maximum
value
allowed
Minimum
value allowed
9.01
4.51
27.03
0.90
4.51
2.25
13.52
0.45
368
�to average voltage values of 10000 iterations, and so they
mask worst scenarios results that, as Figure 10 shows,
violate by far the voltage lower limit of 0.93 p.u..
variances variations were lower than the predefined value.
6. RESULTS ANALYSIS
To establish a proper comparison between the scenarios of
EV integration studied, the results regarding network impact
assessment were compiled into tables and figures presented
along the next subsections. The power demand, voltage
profiles, branches loading and the daily energy losses were
analyzed, as well as the sample variance.
0.99
0.99
Voltages without EV (p.u.)
0.98
6.1. Power Demand
Figure 6 shows the power demand, in MW, for both EV
integration scenarios studied (25% and 50%), as well as for
the network in its initial conditions, where no EV were
considered.
0.98
0.97
0.97
0.96
0.96
0.95
0.95
0.94
0.93
0.94
0.92
0.93
0.91
0.9
17
6
0.92
0.91
19
21
23
Bus
Power demand without EV
Average power demand with 25% EV
Average power demand with 50% EV
25
27
0
6
12
18
24
4
1
1
0.99
3
0.99
Voltages with 25% EV (p.u.)
0.98
2
1
0
4
8
12
Hour
16
0.9
Hour
Figure 7 – Voltages in buses 17 to 27, in the scenario
without EV
5
Power demand (MW)
1
1
20
24
Figure 6 – Power demand along a typical winter weekday
0.97
0.96
0.96
0.95
0.95
0.94
0.93
0.94
0.92
0.93
0.91
0.92
0.9
17
It is interesting to notice that the peak hour changes, in both
scenarios with EV, from 19:30 h to 00:00 h and that the
demand at the end of the day is very different from the value
observed at the initial time instant. This results from the
values initially assumed for the Gaussian distribution used
to define EV SOC at time instant = . A different
Gaussian distribution would lead to different power demand
values, principally during the first hours of the day.
With 25% of EV, the power demand in the peak hour
increases 41%, from 2.6 to 3.7 MW, whereas with 50% of
EV it increases 109%, from 2.6 to 5.4 MW. The daily
energy demand increases from 95.1 to 124.7 MWh, with
25% of EV, and to 152.7 MWh, with 50% of EV.
0.98
0.97
0.91
19
21
23
Bus
25
27
0
12
6
18
24
0.9
Hour
Figure 8 – Voltages in buses 17 to 27, in the scenario with
25% EV
1
1
0.99
0.99
Voltages with 50% EV (p.u.)
0.98
6.2. Voltage Profiles
0.98
0.97
0.97
0.96
0.96
0.95
0.95
0.94
0.93
0.94
0.92
0.93
0.91
To provide a clear picture of the EV impact in terms of
voltage profile of one feeder, along the entire day, the
average voltages obtained for buses 17 to 27 were compiled
and presented in Figure 7 (scenario without EV), Figure 8
(scenario with 25% EV) and Figure 9 (scenario with 50%
EV). As these three charts show, the extra power demanded
by EV provokes a considerable voltage drop along this
feeder, namely at the beginning and at the end of the day. It
should be mentioned that the results presented are referred
0.9
17
0.92
0.91
19
Bus
21
23
25
27
0
6
Hour
12
18
24
0.9
Figure 9 – Voltages in buses 17 to 27, in the scenario with
50% EV
In order to assess the worst voltage conditions that these
levels of EV integration might lead to, the highest peak load
369
�scenarios registered along the 10000 iterations were
analyzed, and the corresponding voltage values were plotted
in Figure 10.
The probabilities presented in this figure were obtained
using equation (4):
.
1
Peak hour voltage (p.u.)
0.96
0.94
0.92
0.9
0.86
Without EV
With 25% EV
With 50% EV
System operator voltage lower limit
EN 50160 voltage lower limit
5
10
15
.
.
(4)
Given that out of limit voltages only occurred in buses 18 to
40, only these were chosen to appear in Figure 11.
For the scenario with 25% of EV, only a small number of
violations were record. There were only some problems in
buses 38, 39 and 40.The probability of having in these buses
voltages below 0.93 p.u. is lower than 2%.
In what regards the scenario of 50% EV integration, the
probability of having voltages below the imposed limit is
rather significant in a large number of buses. The highest
probabilities appear again for buses 38, 39 and 40, reaching
values around 12%.
0.98
0.88
=
20
25
30
35
40
45
6.3. Branches loading
Bus
Figure 10 – Network voltage profiles for the highest peak
load identified in both scenarios of EV integration
Even though this is not the most critical aspect of this
network, since the highest line loading in the scenario with
50% of EV is only 54%, branches loading is also an issue
that deserves special attention. In fact, in other networks
with different characteristics, the lines loading can be the
limiting factor to high integration levels of EV.
Figure 12, Figure 13 and Figure 14 provide an overall idea
of the impact provoked by EV in the network lines loading,
during the average peak load demand (average of the peak
loads obtained along the 10000 iterations). Figure 12 is
referred to the average peak load of the scenario without
EV, while Figure 13 and Figure 14 are referred to the
average peak load of the scenarios with 25% and 50% of
EV, respectively. The colour grading between light green
and dark red stands for increasing line loading values,
ranging from 0 to 100%.
The network voltage profile in the scenario without EV is
also presented in Figure 10, for comparison purposes, as
well as two reference voltage levels: one stipulated by EN
50160 [17] and the other with a security margin of 0.03 p.u..
While an EV integration of 25% does not decrease voltages
to very problematic values, 50% of EV integration lead
voltages to considerably low values, which in almost 50%
of the buses are below the 0.93 p.u. threshold. Moreover, the
voltages in the higher EV integration scenario violate the
limit of 0.90 p.u. in more than 25% of the network buses.
As mentioned in subsection 5.2, all the voltage and lines
loading limit violations were recorded along the simulation,
in order to keep track of the most problematic areas of the
network. As this network is exceptionally robust, despite the
increase in the network power flows, no lines loading above
the limit were registered. Given that the EV integration only
increases consumption, only voltages decrease will occur
and so, as it is obvious, no voltages above the higher limit
were recorded.
Conversely to high voltage problems, voltages below the
lower limit occurred very often, as denoted in Figure 11.
14
With 50% EV
With 25% EV
Voltage lower limit violation probability (%)
12
10
8
6
4
Figure 12 – Lines loading for the average peak load
demand of the scenario without EV
2
As expected, the line loadings increase with the number of
EV in the network, being the most problematic branches
those located in the beginning of the heavily loaded feeders.
0
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41
Bus
Figure 11 – Voltage lower limit violation probability
370
�The daily energy losses grow 58% from the scenario
without EV to the one with 25% of EV and 140% to the one
with 50% of EV. As expected, these values prove that
energy losses do not follow linearly the load demand
increase. Thus, for higher EV integration levels, where the
network would be operated near its technical limits, losses
are likely to be a rather important issue for the system
operator, since it will be wasting large amounts of money
when delivering energy to the final consumers. Therefore, in
such circumstances, the system operator should look for
efficient mechanisms to manage EV charging somehow, in
order to avoid this problem.
6.5. Monte Carlo Convergence and Sample Variance
As mentioned in section 5.3. the Monte Carlo process ends
when two criteria are met: when 10000 iterations are
performed and when the variations of the 48 variances
between the last 10 iterations are lower than
. The
variances variation is calculated using equation (5):
Figure 13 – Lines loading for the average peak load
demand of the scenario with 25% of EV
∆
=
(5)
where
represents the variance of the network load
at time instant (that varies between 0 and 47), in the
iteration.
For all the scenarios simulated, the variances variation
criterion was met before the algorithm reach iteration
10000. As an example, it is presented in Figure 16 the
evolution of the variance with the highest variation rate of
both scenarios of EV integration. As it is shown, the
variation rate after iteration 5000 is very low, indicating that
the algorithm reached, or at least is near to reach, the
convergence criteria.
0.07
With 25% EV
With 50% EV
0.06
Figure 14 – Lines loading for the average peak load
demand of the scenario with 50% of EV
Variance
0.05
6.4. Energy Losses
In Figure 15, it is depicted the average value of the daily
energy losses, obtained along all the iterations performed.
0.04
0.03
0.02
2500
0.01
0
0
Average daily energy losses (kWh)
2000
2000
3000
4000
5000
6000
Monte Carlo iterations
7000
8000
9000
10000
Figure 16 – Evolution of the variances with the highest
variation rate in both scenarios of EV integration
1500
When iteration 10000 was reached in the simulation of the
scenario with 25% of EV, the variance with the highest
∆
converged to 9.
. For the scenario with 50%
of EV, the variance with the highest ∆
converged
. The higher value registered in this scenario
to 7.
indicates that the samples generated have a lower precision
when compared with the samples of the scenario with 25%
of EV. In simpler terms, these findings show that the
1000
500
0
1000
Without EV
With 25% EV
With 50% EV
Figure 15 – Average daily energy losses
371
�The simulation platform developed in this work proved to
be very efficient in performing a realistic evaluation of the
impacts that result from a massive integration of EV in
distribution networks. Besides the evaluation of the steady
state operating conditions of the grid, it also allows
identifying the most critical operation scenarios and the
network components that are subjected to more demanding
conditions and that might need to be upgraded.
uncertainty in the network load estimation is larger in the
scenario with a higher number of EV.
The variances analysis led to a further interesting finding:
the values to which the 48 variances tend, when grouped
together, present the same curve form of the state transition
probabilities to in movement state, as shown in Figure 3.
This evidence can be found in both scenarios of EV
integration, as shown in Figure 17. In an ultimate analysis,
in a not completely surprising way, these results reveal that
there is a very high correlation between the EV motion
patterns and the uncertainties in the network power demand
estimation.
REFERENCES
[1]
0.07
[2]
With 50% EV
With 25% EV
[3]
0.06
Variance
0.05
0.04
[4]
0.03
0.02
[5]
0.01
0
4
8
12
Hour
16
20
[6]
24
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
Figure 17 – Values obtained for the network load variances
of the 48 time instants
7. CONCLUSIONS
By analysing the results obtained for the case study
addressed in this work, it might be concluded that the island
network is very robust, being therefore capable of
integrating a large number of EV without the occurrence of
line loading and voltage limits violations. With 25% of EV
only a small number of voltage lower limit violations were
recorded along the 10000 iterations performed. However, in
the scenario with 50% of EV the number of violations
registered was greatly increased. These results show that
while the network resists to a 25% replacement of the
conventional vehicles fleet by EV, it is impossible to
proceed to a 50% replacement rate without making large
investments in network reinforcements, in order to tackle
the low voltage problems identified.
Important findings were also made regarding the energy
losses. Their value grows 58% from the scenario without
EV to the one with 25% of EV and 140% to the one with
50% of EV. These values show that, for higher EV
integration levels, losses are likely to become a very
important issue for the system operator. Therefore, in such
circumstances, the system operator should look for efficient
mechanisms to manage EV charging, in order to avoid
wasting large amounts of money in the energy distribution
process and in network reinforcements.
[15]
[16]
[17]
K. A. Baumert, T. Herzog, and J. Pershing, "Navigating the Numbers:
Greenhouse Gas Data and International Climate Policy," World
Resources Institute, Washington D.C., 2005.
2009, Climate Analysis Indicators Tool (CAIT) Version 6.0.
Available: http://cait.wri.org/cait.php?page=sectors
J. A. Peças Lopes, F. J. Soares, P. M. Rocha Almeida, Patrícia C.
Baptista, Carla M. Silva, Tiago L. Farias, “Quantification of
Technical Impacts and Environmental Benefits of Electric Vehicles
Integration on Electricity Grids”, ELECTROMOTION 2009 - 8th
International Symposium on Advanced Electromechanical Motion
Systems , Lille, France, July, 2009.
J. A. Peças Lopes, F. J. Soares, P. M. Rocha Almeida, A. M. Moreira
da Silva, “Smart Charging Strategies for Electric Vehicles: Enhancing
Grid Performance and Maximizing the Use of Variable Renewable
Energy Resources”, EVS24 - The 24th International Battery, Hybrid
and Fuel Cell Electric Vehicle Symposium & Exhibition, Stavanger,
Norway, May, 2009.
J. A. Peças Lopes, F. J. Soares, P. M. Rocha Almeida, “Identifying
Management Procedures to Deal with Connection of Electric
Vehicles in the Grid”, PowerTech2009 - PowerTech 2009, Bucharest,
Romania, June, 2009.
INE – Instituto Nacional de Estatística, “Inquérito à mobilidade da
população residente”, 2000 (in Portuguese).
http://www.venturi.fr
http://www.micro-vett.it/
http://www.mitsubishi-cars.co.uk/imiev/innovation
http://www.chevrolet.com/pages/open/default/future/volt.do
http://www.peugeot.co.uk/vehicles/peugeot-car-range/peugeot-ion/
http://www.phoenixmotorcars.com/pdf/SUV-Specifications.pdf
http://www.modeczev.com/fast_facts.asp
N. Downing, M. Ferdowsi, "EU MERGE Project: Mobile Energy
Resources in Grids of Electricity," deliverable D1.1, "Identification of
Traffic Patterns and Human Behaviours," April, 2010.
Decreto-Lei n.º 39/2010, Diário da República, 1.ª série — N.º 80 —
April 26th, 2010 (Decree-Law in Portuguese).
C. L. Azevedo, “Métodos de estimativa de volumes anuais de tráfego
rodoviário - um modelo para Portugal”, Master Thesis in Transports,
IST, Universidade Técnica de Lisboa, 2008 (in Portuguese).
EN 50160:2007, “Voltage characteristics of electricity supplied by
public
distribution
systems”,
European
Committee
for
Electrotechnical Standardization – CENELEC.
ACKNOWLEDGMENT
This work was supported in part by Fundação para a Ciência
e
Tecnologia
under
SFRH/BD/48491/2008
and
SFRH/BD/47973/2008 grants and within the framework of
the Project “Green Island” with the Reference MIT-PT/SESGI/0008/2008, by Fundo de Apoio à Inovação (Ministério
da Economia, da Inovação e do Desenvolvimento), within
the framework of the Project REIVE – Redes Eléctricas
Inteligentes com Veículos Eléctricos, and by the European
Commission within the framework of the European Project
MERGE – Mobile Energy Resources in Grids of Electricity,
contract nr.241399 (FP7).
372
�
 J. A. Pecas Lopes
J. A. Pecas Lopes