Centralized Control for DC Microgrid Using
Finite State Machine
1
Mahmoud Saleh, Student Member, IEEE, Yusef Esa, Student Member, IEEE, and Ahmed Mohamed,
Member, IEEE
Abstract— In this paper, an autonomous communication-based
centralized control for DC microgrids (MG) has been developed
and implemented. The proposed controller enables smooth
transition between various operating modes. Finite state machine
(FSM) has been used to mathematically describe the various
operating modes (states), and the events that may lead to mode
changes (transitions). Therefore, the developed centralized
controller aims at optimizing the performance of MG during all
possible operational scenarios, while maintaining its reliability
and stability. Results of selected drastic cases have been presented.
These results show stable transition between modes, verifying the
validity and applicability of the proposed controller.
Index Terms--Centralized Control, Communication based control,
DC microgrid, Finite state machine, Smart grid, State flow
I. INTRODUCTION
mart grids are intelligent and dynamically interactive realtime power grids, introduced with the urgent need for more
resilient, and self-healing capabilities. The realization of smart
grid became more feasible with the outburst of new
technologies, e.g. information and communications technology
(ICT), advanced metering infrastructure (AMI), microgrids,
electrical vehicles, etc. Essentially it involves integration of
measuring circuits, sensors and communication networks,
among various technologies, that is capable of supervising the
electric grid system, and control of the energy flow in real time
[1-3]. Microgrid is one of the main pillar of smart grids, which
prominently contribute to its level of resiliency, and could
indemnify for partial grid generation loss [4-6].
Microgrid is a local distribution network comprising
distributed energy resources (DER), energy storage systems
(ESS) and loads, which aggregately function in a controlled
fashion as a single entity, in either a grid-tied mode or an
islanded mode [7]-[8]. Each of the MG components is
controlled via a dedicated local controller. Local controllers
must be coordinated to maintain load/generation balance, and
optimize the performance of a MG. Coordination can be
achieved through one of the following three architectures.
Communication-less control: where there are no
communication links between local controllers, and the
deviation in the DC bus voltage is used to signal
load/generation unbalances [9-10]. Therefore, it is also known
as voltage droop control. This architecture has an advantage of
being relatively reliable since it does not depend on
communication systems and their inherent drawbacks (e.g.
delays and packet loss). However, some of the main drawbacks
of this architecture are suboptimal microgrid operation, and
circulating currents.
Distributed
communication-based
control:
where
communication links exist between the local controllers (LCs).
LCs coordinate their decision, but final control decisions are
being processed and executed locally. This architecture, if
properly designed, is immune to single point failure, i.e. MG
can maintain full operation even with the failure of some of the
S
LCs or communication links. However, it introduces
complexity, and cannot achieve optimal MG operation [11].
Centralized
communication-based
control:
where
event/command signals between the LCs and a supervisory
centralized controller, are being transmitted/received directly.
Since the supervisory controller has global information on the
various MG components, a predesigned algorithm can be
implemented to achieve any desired objective, e.g. optimal
operation. However, the reliability of this architecture is
dependent on that of the communication system being utilized
[11].
Development of an automated control system, which
preserves MG stability/reliability during all possible scenarios
while maintaining optimal operation is badly needed.
Therefore, this challenge has attracted the attention of many
researchers globally. However, the research that has been
performed to address this challenge either focused on a specific
case [12], or did not consider all possible scenarios/modes of
operations. Moreover, it was mostly focused on designing a
controller that guarantees stable MG operation [13]-[16],
overlooking some other essential performance features
including: energy/economic savings during grid connection,
mitigating renewable energy intermittency, etc.
In this paper, an autonomous centralized control, will be
developed for DC MG, and implemented using finite state
machine (FSM). The controller includes a forethought control
logic implemented within, to guarantee MG reliability and
resiliency during various modes of operation.
II. MODEL ARCHITECTURE
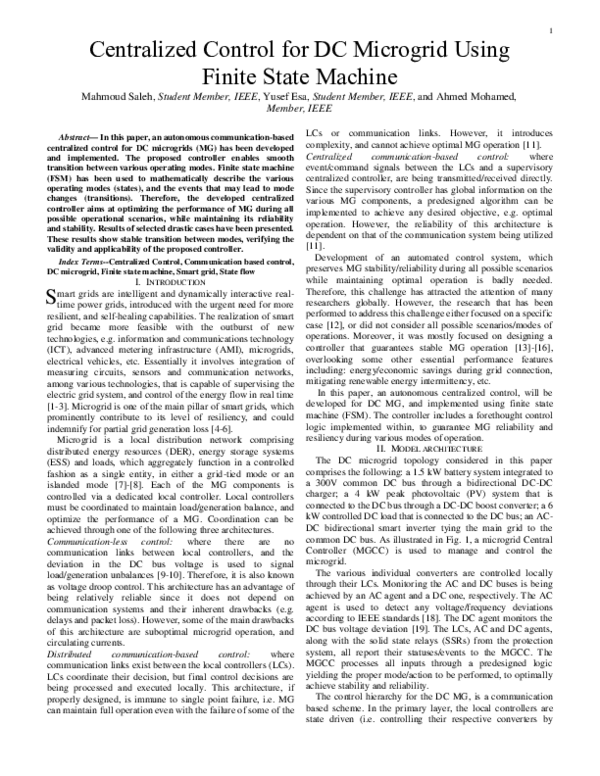
The DC microgrid topology considered in this paper
comprises the following: a 1.5 kW battery system integrated to
a 300V common DC bus through a bidirectional DC-DC
charger; a 4 kW peak photovoltaic (PV) system that is
connected to the DC bus through a DC-DC boost converter; a 6
kW controlled DC load that is connected to the DC bus; an ACDC bidirectional smart inverter tying the main grid to the
common DC bus. As illustrated in Fig. 1, a microgrid Central
Controller (MGCC) is used to manage and control the
microgrid.
The various individual converters are controlled locally
through their LCs. Monitoring the AC and DC buses is being
achieved by an AC agent and a DC one, respectively. The AC
agent is used to detect any voltage/frequency deviations
according to IEEE standards [18]. The DC agent monitors the
DC bus voltage deviation [19]. The LCs, AC and DC agents,
along with the solid state relays (SSRs) from the protection
system, all report their statuses/events to the MGCC. The
MGCC processes all inputs through a predesigned logic
yielding the proper mode/action to be performed, to optimally
achieve stability and reliability.
The control hierarchy for the DC MG, is a communication
based scheme. In the primary layer, the local controllers are
state driven (i.e. controlling their respective converters by
�2
S1
AC
Agent
S10
CInv
Mode 1
Grid
A
V
SSRPCC
DC
Agent
A
A
A
V
V
Inverter
V
S2
S3
S11
Solar
panels
CBi
Mode 2
SSRBo
Boost converter
S1
S4
MGCC
S8 , S9
Mode 3
Report AC voltage/ frequency
CBo
level violations
S2: Report DC voltage level
Batteries
violations
SSRBi
S3 SSRPCC fault signal
S4 SSRPC fault signal
S5 Bi- fault signal
Bidirectional converter
S6 Utility control signal
S7 Energy price (high/low)
Load shedding
CL
S8 SOC (depleted/charged)
S9 Batteries over discharge
S10 Inverter status
S11 Boost status
DC
S6 ,S7
S5
Utility
Loads
DC bus
Pulses/ Commands
Measurements
Status/ Mode
Transition
Fig. 1. Microgrid architecture
continuously monitoring certain state variables), which requires
incessant communication, e.g. voltage/current measurements
and pulse signals to the switches of the converters.
In the secondary layer, the modes and set points are being
assigned to each LC by the MGCC, to maintain the required
voltage level within the DC MG and optimize its operation. The
MGCC is event driven, i.e. it does not require continuous
communication with the LCs. The devised logic within the
MGCC was conceived such that the MGCC only takes an action
if new event occurs, which reduces the communication
requirement within the secondary layer, e.g. the required
bandwidth. The tertiary controller handles the functionalities
that exceed the boundaries of a single microgrid, e.g. utility
control of a group of microgrids. The main focus of this paper
is the secondary layer.
III. SECONDARY CONTROL USING FINITE STATE MACHINE
Finite state machine (FSM) provides a mathematical means to
represent a finite number of states, and describe the transition
between them. To represent the proposed control scheme, FSM
has been used. FSM can be thought of as a machine with a finite
number of operational conditions called states, or in this case,
“modes.” The machine can be in only one state at any given
time, and can transition to other states based on events.
The FSM for the entire DC MG control could be represented by
the following variables (∑, M, m00, δ), where:
∑: is a finite set of inputs to the MGCC, which are the
events in Table 1.
M: is a finite, non-empty set of modes, which comprises all
modes sets:
- M00 (Grid-tie/Energy saving mode) = {m00, m01, m02},
such that ∀m0j (m0j∈ M00 → m0j ∈ M) where j = , , .
- M10 (Islanding mode) = {m10, m11, m12, m13}, such that
∀m1j (m1j∈ M10 → m1j ∈ M) where j = , , , .
- M20 (Utility mode) = {m20}, such that m30 ∈ M.
- M30 (Shutdown mode) = {m30}, such that m40 ∈ M.
Therefore M = {M00, M01, M03, M04}, which will be more
explicitly explained in section V.
m00: is the initial mode of the FSM, m00 ∈ M.
δ: is the mode transition function; δ: M × ∑ → M, it can
be seen in the transition Table 1.
The control action of the LCs is dependent upon the mode/submode of operation being triggered by the MGCC, e.g. during
m00 (grid-tied sub-mode), CBo (boost converter LC) is MPPT
controlled, while during m13, it is voltage controlled. The modes
are based on the event signals being transmitted to the MGCC,
and the logic/algorithm implemented within, which will trigger
a proper transition. Transitions will be discussed further in
section IV.
The levels of load shedding are supposed to be dynamic within
the islanding mode. The logic was prepared to have
downstream load shedding during M10, i.e. no reconnection of
loads happens unless normal operation is retained, to preserve
the safety of the loads. The levels of load shedding will be
selected based on the emergency loads, available resources at
the instant of load shedding, and a margin of safety to account
for solar intermittency. An average constant load within the
time interval of the load shedding process was assumed. Four
levels of load shedding where used within the islanding mode:
(1) the first level of load shedding that is triggered at the
moment of islanding. This level is function of the available
resources; (2) the second level of load shedding takes place
when the batteries are depleted; it is related to the battery and
solar systems sizes, and the percentage of current that will be
assigned to the batteries to charge with, e.g. less than 50% of I1c
(rated current at rate of charge one C). The percentage of the I1c
depends on the amount of the emergency loads and its priority;
(3) the third level occurs when the boost converter is tripped or
its sunset, and is function of the battery size; and (4) the last
level of load shedding is triggered when the bidirectional
converter is tripped while the boost converter is still available.
At this level of load shedding, it is preferable to keep a minimal
portion of the total load, and only keep the loads that are less
sensitive to voltage variations, in case of intermittency.
However, if voltage variations are significant, transition to M 30
will occur to preserve load safety.
IV. OPERATIONAL MODES LAYERS AND TRANSITION
CONDITIONS
The architecture of the control scheme starts with the main
layer that encompasses four modes: (1) grid-tied (energy
saving) mode, which is the initial mode M00; (2) islanded mode
M01; (3) utility mode M03; and (4) shutdown mode M04. M00 is
assumed to be the initial mode of the entire FSM. It aims at
achieving economic operation.
A. Main layer
Within this layer, several transitions may occur. For instance, if
a grid outage takes place and gets reported by SSR PCC (S3 = 0),
or the AC agent signals AC voltage/frequency exceeding
permissible limits and lasting beyond the average clearing time
specified in [36] to the MGCC (S1 = 0), a transition to M10 will
happen. However, in case the utility sends a signal to take
control of the MG (S6= 1), if all MG resources are available, a
transition to M20 will occur, and if all resources are not available
at any given instant, a transition to M30 will happen. Other
transitions may happen depending on the events being
triggered, which are summarized in Table. 1 and Fig. 2.
B. Grid-tie/Energy saving Mode
Transitions within that mode are triggered by S7, S5 and/or S8,
e.g. starting with m00, the MGCC commands the inverter to
maintain the DC bus voltage, CBo to operate as MPPT and the
bidirectional converter LC (CBi) to be idle, i.e. current control
�3
with Iref = 0. If the utility signals the MGCC that the energy price
is low (S7 = 1), the MGCC checks the last status of CBi to
confirm that the battery is not full (S8 = 0), and the SSRBi to
assure no fault operation (S5 = 1), a transition to m01 takes place.
In m01 the bidirectional starts charging the battery system with
I1c to exploit the advantage of low energy price, while the
inverter and the boost converter are still maintaining the same
operation from m00. However, if the energy price is high (S7 =
0), the SSRBi last report was no fault operation (S5 = 1), and the
CBi last signal that the battery has the capability to discharge (S8
= 1), a transition to m02 happens. In m02 the LCs maintain the
same tasks of m00, except for the bidirectional converter, starts
discharging with the maximum current I1c. The rest of
transitions can be observed from Fig. 2 and Table. 1.
C. Islanding Mode
M10 is triggered when SSRPCC signals the circuit breaker to open
and informs the MGCC with that event (S3 = 0), e.g. due to a
power outage. M10 includes four sub-modes, islanding m10,
contingency m11, critical m12, and extreme m13 sub-mode. A
number of transitions may possibly takes place, one at a time.
For example, starting from sub-mode m10, shown in Fig. 2, the
MGCC trigger the first level of load shedding, CBo to operate as
MPPT, and CBi to fix the DC bus voltage. If the SSRBi detects a
fault where it is located, e.g. due to abnormal operation of the
bidirectional converter or a fault, and report it (S5 = 0), a
transition to m13 will happen. In m13, CBo maintains the DC bus
voltage, and a maximum level of load shedding will be
triggered. At this level, the load almost equals ~10-20% of the
solar peak power that was available within the previous hour.
The type of loads connected during that level of load shedding
should be able to handle a wide range of voltage variation, since
the battery is not available to buffer the expected power
intermittency. If the DC voltage changes beyond the
permissible limits of [36] during m13 (S2 = 0), a transition to m13
will take place to protect the loads as shown in Fig. 2. However,
starting from m10, if CBi informs that the batteries are depleted
(S8 = 0), while the boost converter is still available, through
checking the last status signal from the SSRBo by the MGCC (S4
= 1), a transition T11 to m11 will occur. In this case, the second
level of load shedding will take place, such that a portion of the
available solar energy is used to charge the batteries with a
maximum of half I1C, to guarantee continuous operation of the
loads for as long as possible. The rest of energy is used to
maintain supplying the remaining loads. This happens while the
boost converter is MPPT controlled, and the bidirectional
converter is still maintaining the DC bus voltage. On the other
hand, also starting from m10, if solar intermittency occurred
while the bidirectional converter is maintaining the DC bus
voltage, the battery system might over discharge to keep
supplying the loads. If this takes place for a time interval that is
greater than the settling time of the nested PI of the bidirectional
converter LC (S9 = 1), or the SSRBo signals that the boost
convert is tripped (S4 = 0), then a transition T17 to m12 will take
place. The reason for adding the settling time of the converter
PI to the transition condition, is to guarantee that the transient
oscillations of the bidirectional converter LC does not lead to
false transitions. The controller oscillations may happen when
the converter is trying to maintain the DC bus voltage. A
condition to prevent over discharge was added, to extend the
battery system availability during this mode. The rest of the
transitions could be observed from Fig. 2, and Table. 1.
D. Utility and shutdown Modes
The goal of the utility mode M20, is for the utility to take
control over the MG, according to a predefined agreement, e.g.
to aggregate multiple MGs for virtual power plant operation, or
enhance the voltage level by injecting reactive power. In this
case, the inverter LC is performing current or P/Q control. As
for the shutdown mode M30, its objective is to guarantee a
shutdown in case all the resources are tripped or not available
at any given moment, or in case the permissible limits of the
DC voltage are violated during m13, in order not to jeopardize
the loads safety.
V. RESULTS AND DISCUSSIONS
In order to illustrate the operation of the proposed secondary
communication-based FSM-enabled controller, some selected
scenarios will be presented and discussed. Each case is
presented by a set of four subplots. Each subplot has five
sections, each section reflects a new event or a set of events
taking place. The (a) subplot of each figure represents DC
currents for the inverter, boost converter, bidirectional
converter and DC load. Subplots (b), (c) and (d), demonstrate
the DC bus voltage, AC current from the inverter to the grid,
and AC voltage, respectively.
A. Case One
This case shows the operation of the MGCC to control the DC
MG in case of islanding, showing solar intermittency impact on
the transition between modes of operation among other events.
Section (1) displays the transition T 11 from m00 to m10, due to a
blackout being signaled by SSRPCC (S3= 0). The first level of
load shedding is triggered by the MGCC, reducing DC load
current and dropping the AC current from the MG to the grid to
zero as shown in Figs. 3(a) and 3(c), respectively. During m10,
the MGCC commands CBi to maintain the DC bus voltage to
300 V, and CBo to maintain MPPT control, which can be noticed
in Fig. 3(a). Throughout section (2), solar intermittency caused
the batteries to over discharge beyond 5 A, for a period of time
longer than the settling time of CBi PI (200 msec).
Consequently, S8 becomes one, signaled by CBi, therefore, the
MGCC checks the last status of SSRBi, if there is no fault (S5 =
1), a transition T12 to m12 happens. In m12 another level of DC
load shedding is introduced, that can be seen from the DC load
current in Fig 3-a; while the LCs maintain the same duties as in
m10. ). During m12, the LCs maintain the same duties as in m10.
During section (3), the boost converter is tripped, and in section
(4), it is reconnected. Concurrently, C Bi reacts to maintain the
DC bus voltage (i.e. discharging when the boost converter was
tripped, and charging when it was reconnected). Section (5)
represents the tripping of the bidirectional converter, where the
bidirectional output current drops to zero, triggering m14.
Within m14 maximum load shedding is triggered, CBo is
commanded to switch to voltage control, where the DC load
current drops to ~10-20% of solar energy, and becomes equal
the boost converter current, which can be noticed in Fig. 3(a).
It can be observed from Fig. 3(b), the DC bus voltage during all
events was maintained within the acceptable limits, by using the
suggested FSM logic to maneuver various critical situations.
�4
Table 1. Transitions among various modes/sub-modes of DC MG
Transition condition
Transition Description
Tripping of the Inverter triggered M01, bidirectional converter fixing DC bus voltage and boost
S3 == 0
converter operating at MPPT while the first level of load shedding is triggered
S3 == 1 && S1 == 1
Synchronization conditions are set for reconnection the DC MG to the grid
S3==0 && S5 == 0 && S4 ==0
Tripping of the Inverter, Boost and Bi-directional converter will cause the MG to shut down
S6 == 0
Utility control over the MG is disabled thus the operation is restored to grid tie mode
S6 == 1 && S3 ==1 && S5 == 1&& S4 ==1
After confirming that all resources are operational the utility is granted control over the MG
S3 ==0 && S5 == 0&& S4 ==0
Tripping of the Inverter, Boost and Bi-directional will cause the MG to shut down
Tripping of the Boost and bidirectional converter, or the DC bus voltage deviated beyond the
S5 == 0 &&(S4 == 0 || (S2 == 0 && after (ts)))
limits, ts is added to guarantee unnecessary transition due to disturbance during settling time (ts)
of the PI
S8 == 1 || S5 == 0
Batteries are full charged or bidirectional converter is tripped
S7 == 1 && S8 == 0 && S5 == 1
Energy price is low, batteries are not fully charged, and the SSR Bi reports no fault
S7 == 0 && S8 == 1 && S5 == 1
Energy price is High, Batteries are not depleted, and the SSR Bi reports no fault
Transition
T1
T2
T3
T4
T5
T6
Main Mode
Transitions
T7
T01
T02
T03
Grid tie
Mode
Transitions
Emergency
Mode
Transitions
m00:
m01:
m02:
m10:
m11:
m12:
m13:
m20:
m30:
T04
S8 == 0 || S5 == 0
Batteries are depleted or bidirectional converter is tripped
T11
S8 == 0 && S4 == 1
T12
(S4 == 0 && S5 == 1) || (S2 == 0 && after (ts))
T13
T14
T15
T16
T17
S5 == 0
(S4 == 1 && S5 == 0) || S8 == 0
S5 == 1
S5 == 0
(S4 == 0 && S5 == 1) || (S9== 1 && after (ts))
Batteries are depleted and boost converter is available
Boost converter is tripped and bidirectional converter is available, or DC bus voltage deviated
severely
Bidirectional converter is tripped
Bidirectional converter is tripped and the boost converter is available, or batteries are depleted
Bidirectional converter is reconnected
Bidirectional converter is tripped
Boost converter is tripped and bidirectional converter is available, or batteries over discharge
Grid-tie saving sub-mode
Batteries charging sub-mode
Batteries discharging sub-mode
Emergency sub-mode
Contingency sub-mode
Critical sub-mode
Extreme sub-mode
Utility mode
Shut-down mode
T1
M00
m02
T03
T02
T04
m01
T01
m00
T5
T2
m10
M20
T4
T7
m20
T3
T11
T16
T17
T15
m11
T6
m30
M30
T12
m12
T13
T14
M10
m13
Grid-tie/energy saving mode
Islanding mode
Utility mode
Shut-down mode
Main mode transitions
Sub-mode transitions
Fig. 2. Operational modes/ sub-modes of DC MG.
B. Case Two
This case shows the operation of the MGCC, during the gridtied/energy saving mode M00. Throughout section (1), a signal
sent by the utility to the MGCC, informing it that the energy
price is low (S7 = 1). The MGCC checks the last SOC of the
battery system through the latest signal received from the CBi,
confirming it is not full (S8 = 0). It also checks the last status of
SSRBi assuring normal operation (S5 = 1), which leads the
MGCC to trigger T02 to m01. Each converter LC maintains their
ongoing tasks; the inverter maintains the DC bus voltage to 300
V, and CBo operates as MPPT. CBi initiates maximum charging
(Iref = I1c), using current control as can be noticed in Fig. 4-a,
where the bidirectional converter current becomes -5 A, i.e.
charging with 5 A. Therefore, the inverter DC current increases
to 5 A to maintain the dc bus voltage to 300 V as shown in Fig.
4(b). The AC current increases as well from the grid to the
inverter, as shown in Fig. 4(c). For the interval of section (2),
CBi signals that the battery system is fully charged (S8 = 1), then
m00 is retained by the MGCC through T01, as shown in Fig 4(a),
where the bidirectional converter output current drops to zero.
The current of the inverter drops to zero as well. Therefore, the
DC bus voltage is regulated as shown in Fig 4(b), since the DC
MG can self-sustain its DC loads at that interval. During section
(3), while m00 is still active, some solar power fluctuations start
causing the boost converter output current to decrease
gradually. The inverter DC/AC current increases in order to
maintain the DC bus voltage, which can be noticed in Figs. 4(a),
4(b) and 4(c), respectively. During section (4), the irradiance
goes back to its value of section (1), and the boost converter
output current as well. This results in dropping the inverter
DC/AC current to almost zero, maintaining the DC bus voltage,
as shown in Figs. 4(a), 4(b) and 4(c), respectively. During the
last segment, the utility signals high energy price to the MGCC
(S7= 0). The MGCC confirms the availability of the
bidirectional converter, by checking the last status report it got
from the SSRBi. If there was no fault (S5 = 1), a transition T03
from m00 to m02 takes place. CBi switches to current control and
starts discharging at the rated current (I1c) with 5 A. Therefore,
the inverter DC current drops to -5 A to maintain the DC bus
voltage to 300 V, i.e. sending 5 A to the grid, as shown in Figs.
4(a) and 4(b), respectively.
VI. CONCLUSION
Autonomous centralized communication based control for DC
MG was developed in this paper. All possible scenarios,
including severe conditions were conceived to better prepare
the logic implemented within the MGCC using FSM. Reliable/
resilient operation while maintaining optimal performance, and
maneuver intensive conditions was demonstrated in the results.
The proposed control scheme has event driven controlled
MGCC and state variables driven controlled LCs. Such hybrid
combination, reduces the required communication bandwidth,
compared to the regular control communication based
techniques. FSM was used as a representation of the eventdriven MGCC, where the MG responds to an event by making
a transition from one mode to another, and it can be in only one
mode at a time and can transition to another mode based on
some events. Moreover FSM was utilized due to the similarity
of event driven control and discrete mathematical models,
which increase the feasibility of implementing the logic within
the MGCC.
�5
VII. REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
Fig. 3. Case two, showing operation during islanding mode.
.
[16]
[17]
[18]
G. Turner, J. Kelley, C. Storm, D. Wetz, W. Lee, “Design and Active Control of a
Microgrid Testbed” IEEE Transactions on Smart Grid, VOL. 6, NO. 1, JANUARY
2015.
F. Li et al., “Smart transmission grid: Vision and framework,” IEEE Trans. Smart
Grid, vol. 1, no. 2, pp. 168–177, Sep. 2010.
"Smart
grid,"
in
Energy.gov,
2011.
[Online].
Available:
http://energy.gov/oe/services/technology-development/smart-grid.
M. Saleh, A. Althaibani, Y. Esa, Y. Mhandi, A. Mohamed, “Impact of Clustering
Microgrids on their Stability and Resilience during Blackouts,” presented at
Offenburg University of Applied Sciences. ICSGCE, Offenburg, Germany, 2015.
M. Saleh, Y. Esa, A. Moahmed “Design and Implementation of CCNY DC
Microgrid Testbed,” IAS, IEEE, October 2016, Portland, OR.
H. Farhangi, “The path of the smart grid,” IEEE Power Energy Mag., vol. 8, no. 1,
pp. 18–28, Jan./Feb. 2010.
“Microgrid Activities." Microgrid Activities. Department of Energy, n.d. Web. 28
Mar. 2016.
N. Hatziargyriou, Ed., Microgrids: Architectures and control. United States: John
Wiley & Sons, pp.4-70, 2013.
D. Chen and L. Xu, “Autonomous dc voltage control of a dc microgrid with
multiple slack terminals,” IEEE Trans. Power Syst., Vol. 27, No. 4, pp. 1897-1905,
Nov. 2012.
R. S. Balog, “Autonomous local control in distributed DC power systems,” Ph.D.
dissertation, Dept. Electr. Comput. Eng., Univ. Illinois Urbana-Champaign,
Champaign, IL, USA, 2006.
T. Dragicevic, X. Lu, J. C. Vasquez, and J. M. Guerrero, “DC microgrids—Part I:
A review of control strategies and stabilization techniques,” IEEE Trans. Power
Electron., vol. 31, no. 7, pp. 4876–4891, Jul. 2016.
D. Salomonsson, L. Soder, and A. Sannino, “An adaptive control system for a DC
microgrid for data centers,” IEEE Trans. Ind. Appl., vol. 44, no. 6, pp. 1910–1917,
Nov./Dec. 2008.
Z. Yixin, Z. Fang, X. Liansong, "Communication Platform for Energy Managem
System in a Master-slave Control Structure Microgrid," IPEMC2012-ECCEAsia,
China, 2012.
W. Li, X. Mou, Y. Zhou, and C. Marnay, “On voltage standards for DC home
microgrids energized by distributed sources,” in Proc. 7th Int. Power Electron.
Motion Control Conf. (IPEMC), vol. 3. Harbin, China, Jun. 2012, pp. 2282–2286.
Q. Shafiee, T. Dragicevic, J. C. Vasquez, and J. M. Guerrero, “Hierarchical control
for multiple DC-microgrids clusters,” IEEE Trans. Energy Convers., vol. 29, no.
4, pp. 922–933, Dec. 2014.
L. Che and M. Shahidehpour. Dc microgrids: Economic operation and
enhancement of resilience by hierarchical control. IEEE Transactions Smart Grid,
5(5):2517–2526, 2014.
IEEE Standard for Interconnecting Distributed Resources with Electric Power
systems, IEEE Std 1547 – 2003, June 2003.
J. Choi, H. Jeong, J. Choi, D. Won, S. Ahn and S.Moon, “Voltage control scheme
with distributed generation and grid connected converter in a DC microgrid,”
Energies, 2014, 7, 6477–6491.
Mahmoud S. Saleh is a PhD student at the Smart Grid Laboratory, Department of Electrical
Engineering, City collage of New York. He received his M.S. in Electrical Engineering from
CCNY in 2013. His research interest includes microgrids design, control and optimization.
Yusef Esa is a M.S. student at the Smart Grid Laboratory, City Collage of New York. He
received the B.S. degree in electrical engineering from CCNY in 2015. His research interest
includes microgrids design.
Ahmed A. Mohamed (El-Tallawy) (GS’2009, M’2013) is an Assistant Professor of
Electrical Engineering, City College of New York. He is the director of the Smart Grid
Laboratory at CCNY. . His main research interests include microgrid design and control and
electric vehicles.
Fig. 4. Case one, showing operation during grid-tie mode.
�6
View publication stats
�
 Mahmoud Saleh
Mahmoud Saleh