






































ねじ締めロボット

専用ソフトウェアで簡単プログラミング!
調整工数を大幅に削減可能で、立ち上げ時間が最短で導入可能な高速・高精度のねじ締めロボットです。
アーム長|600 / 700mm
Z軸|200 / 300mm
- 特長
- 仕様
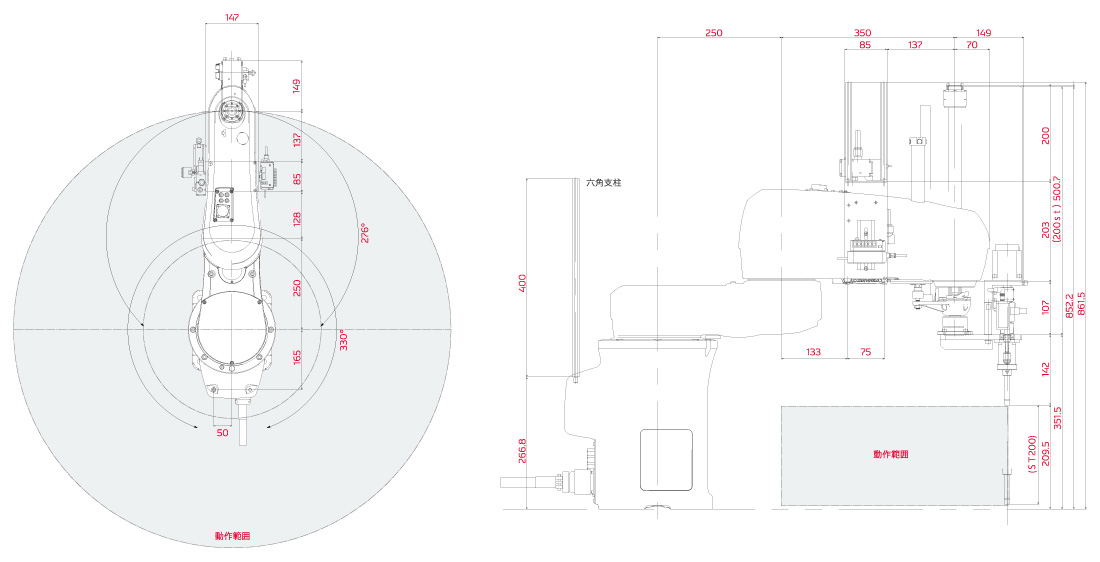
- 外形寸法
品質とサイクルタイムに厳しい 自動車部品業界で生まれた
ねじ締め作業専用のロボット
水平多関節ロボット(HMシリーズ)にねじ締めに必要な制御機器などの配線・配管を含む専用ユニットを搭載し、ソフトウェアや周辺機器もまとめてパッケージ化して提供し、立上げ工数低減に貢献します。
圧倒的な速さと高精度締付け
・ビット回転数:Max 6,000 rpm
・高精度を求められる自動車部品製造での導入実績あり。
トルクの検出能力:トルクセンサの測定レンジに対して
誤差1%以下
・変位センサでのねじ浮きチェック対応(オプション)
ねじ浮きチェック精度:0.05mm以下


Point| 高品質な締付け作業の原理
ロボットコントローラ1台でトルク量・回転量・ねじ進み量を制御。
ねじ締め作業を4段階に分け、それぞれの力を制御しながら締め付けることで、
高品質な締付け作業を実現。
また、トルクを上げるごとにねじを押さえつける力を強くすることでビット滑りを防ぎ、増し締めにも対応可能。
☑ 専用のコマンドを準備しており、細かな調整が不要なため、工数低減が可能
専用GUIで高い操作性を実現
・専用操作画面でねじ締め条件を簡単設定
・100種のねじ締めパターンを事前登録可能で、
ねじのサイズや種類の切り替えに柔軟対応


Point| 様々なねじ締め条件を自由自在に設定
ねじの種類(サイズ・首下長さ等)やワークの硬軟に合わせて、
きめ細かなねじ締め条件の設定が可能です。
立上げ・運用時のチェック機能
・制御ログアナライザでトルク量やねじ締め結果を
「見える化」し、ログデータを蓄積。設定時での活用や、
喰い付きやビット滑りといったエラー発生時の不具合原因発見にて活用可能

制御ログアナライザの活用例

ねじ締めの不具合は、締め付けトルクやねじ回転量、ねじ浮きの異常によって発生します。
制御ログアナライザは、ねじ締め作業を数値化・見える化し、時系列でデータの取得・表示ができるため、結果に対して定量的な判断をすることが可能です。
定量的データを用いて、OK時とNG時のグラフを比較することで、エラー時の変化点調査が容易となり、異常発生時の分析材料として活用することができます。
ナットランナーを使ったねじ締めシステムとの比較

弊社のねじ締めロボットは、回転量と上下軸を専用コマンドで同期させるため、プログラムの作りこみが不要となり、コントローラ1台でシンプルな通信が可能です。
ロボット選定方法

| ねじ締めユニット | 適用ねじ | 種類 | 小ねじ(並目メートル)、タッピンねじ | ||
|---|---|---|---|---|---|
| 呼び径 | M3、M4、M5 | ||||
| 頭タイプ | なべ、バインド | ||||
| 首下長さ | 最大20mm(20mm以上の場合は要相談) | ||||
| ワッシャ | 無し | スプリングワッシャ | スプリングワッシャ+平ワッシャ | ||
| モータ外形および設定トルク範囲 | M3 | □40mm、100W、ブレーキ無 ~1Nm | |||
| M4 | □60mm、200W、ブレーキ無 ~2Nm | ||||
| M5 | □60mm、400W、ブレーキ無 ~4Nm | ||||
| 最高回転数 | 6,000rpm | ||||
| ねじ保持方式 | バキュームパイプ吸着方式 | ||||
| 不良検出機能 | 喰い付き、ねじ穴の潰れ、ビット滑り ※ねじ高さチェックはオプション | ||||
| HMロボット | アーム型式 | HM-40602、HM-40603 | HM-40702、HM-40703 | ||
| コントローラ | RC8 / RC8A | ||||
| 入力電源範囲 | 3相 AC200V -15% ~ AC240V +10% | ||||
| 単相 AC230V -10% ~ AC240V +10% | |||||
| 周波数 | 50Hz / 60Hz | ||||
| Z軸ストローク | 200mm、300mm | ||||
| 制御軸数 | 5(4+1) | ||||
| 位置繰り返し精度 | J1+J2 | ±0.02 | |||
| Z | ±0.01 | ||||
| T | ±0.005 | ||||
| エアー源 | 常用圧力 | 0.05 ~ 0.35MPa | |||
| 許容最大圧力 | 0.59MPa | ||||
| 質量 | 約60kg(ねじ締めユニット含む) | ||||
- 特長
- 仕様
- 外形寸法
関連製品




お問合せ
-
050-5213-4650
平日 9:00 ~ 12:00 13:00 ~ 17:00 (土日を除く)
- 技術的なお問合せ 保守サービスに関するお問合せ 購入に関するお問合せ を、お受けいたします。
-
ダイヤルすると自動音声案内が流れます。音声案内に従って該当する番号のボタンを押してください。
または最寄りの営業・サービス拠点にお問合せください。
