
A Spatio-Temporal Deep Learning Network for the Short-Term Energy Consumption Prediction of Multiple Nodes in Manufacturing Systems


Abstract
:1. Introduction
2. Methods
2.1. Problem Definition
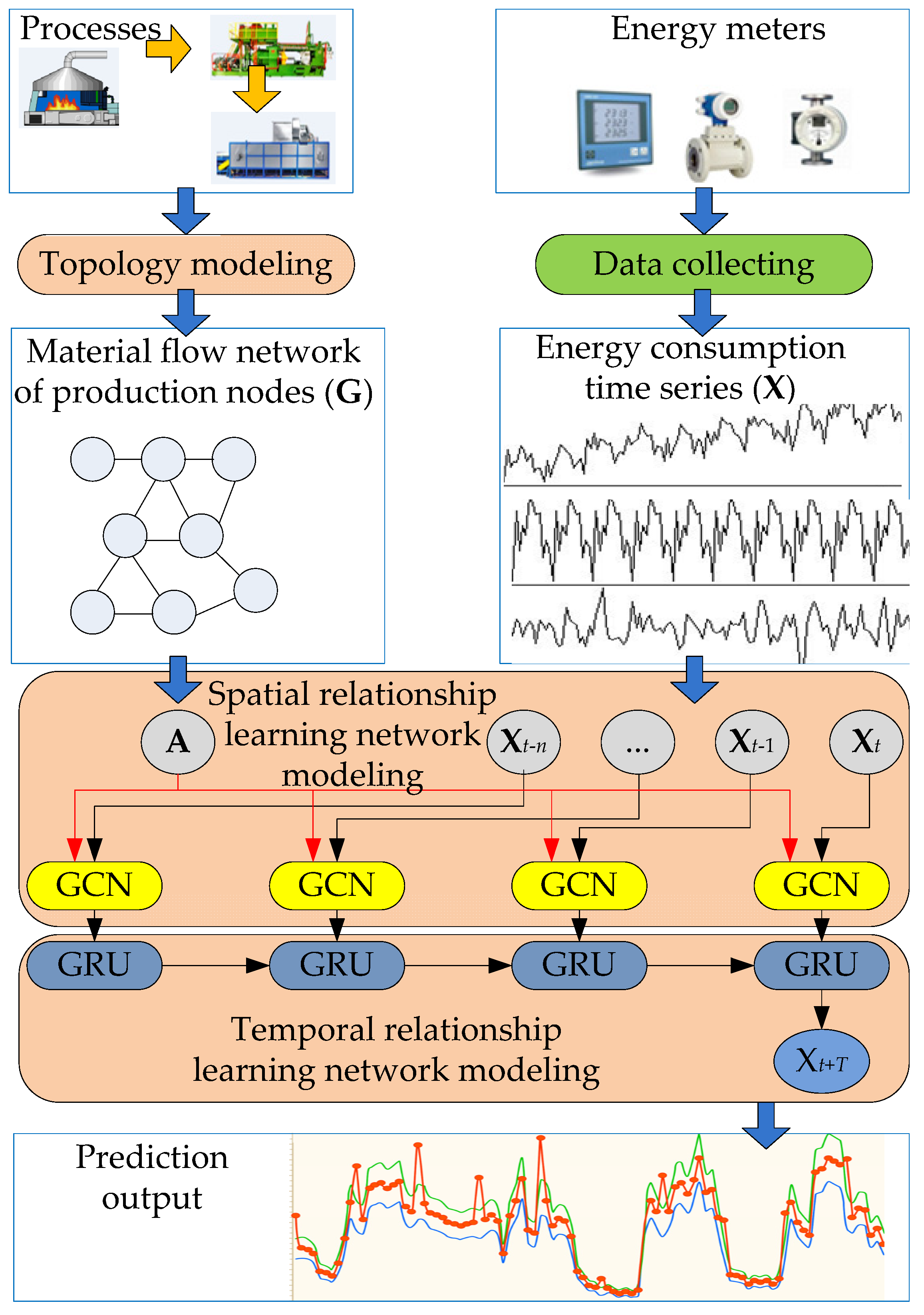
2.2. Framework of Method
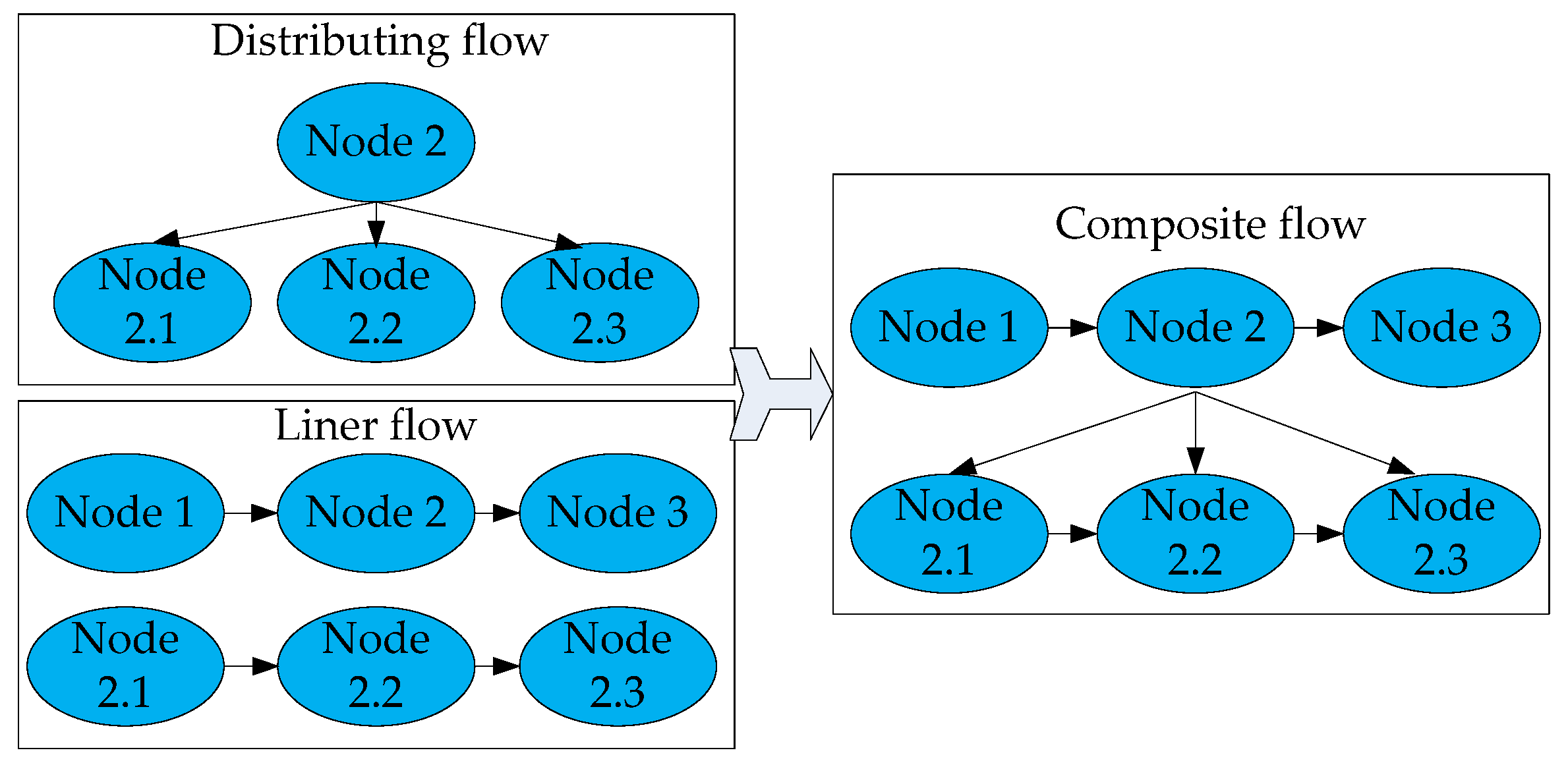
2.3. Topology Modeling
- Identify visible production nodes including workshops and machines and build the distributing flow between the workshop and the machine based on ownership.
- Abstract production nodes at the workshop level.
- (a)
- Merge workshops with a similar process into one process node.
- (b)
- Build the distributing flow between the process node and the corresponding lower workshops.
- (c)
- Build the liner flow between the workshops (or process nodes if there are merged workshops).
- Abstract production nodes at the machine level.
- (a)
- Merge parallel machines into one process node and merge the flow machines into one process node.
- (b)
- Build the distributing flow between the process node and the corresponding downstream machines.
- (c)
- Build the liner flow between the machines (or process nodes if there are merged machines).
- (d)
- Build the liner flow between the flow machines.
- Merge redundant nodes. If one upper node owns only one lower node, the two nodes are redundant and need to be merged as one node.
2.4. Spatial Relationship Learning Network Modeling
2.5. Temporal Relationship Learning Network Modeling
2.6. Loss Function
3. Experiments and Results
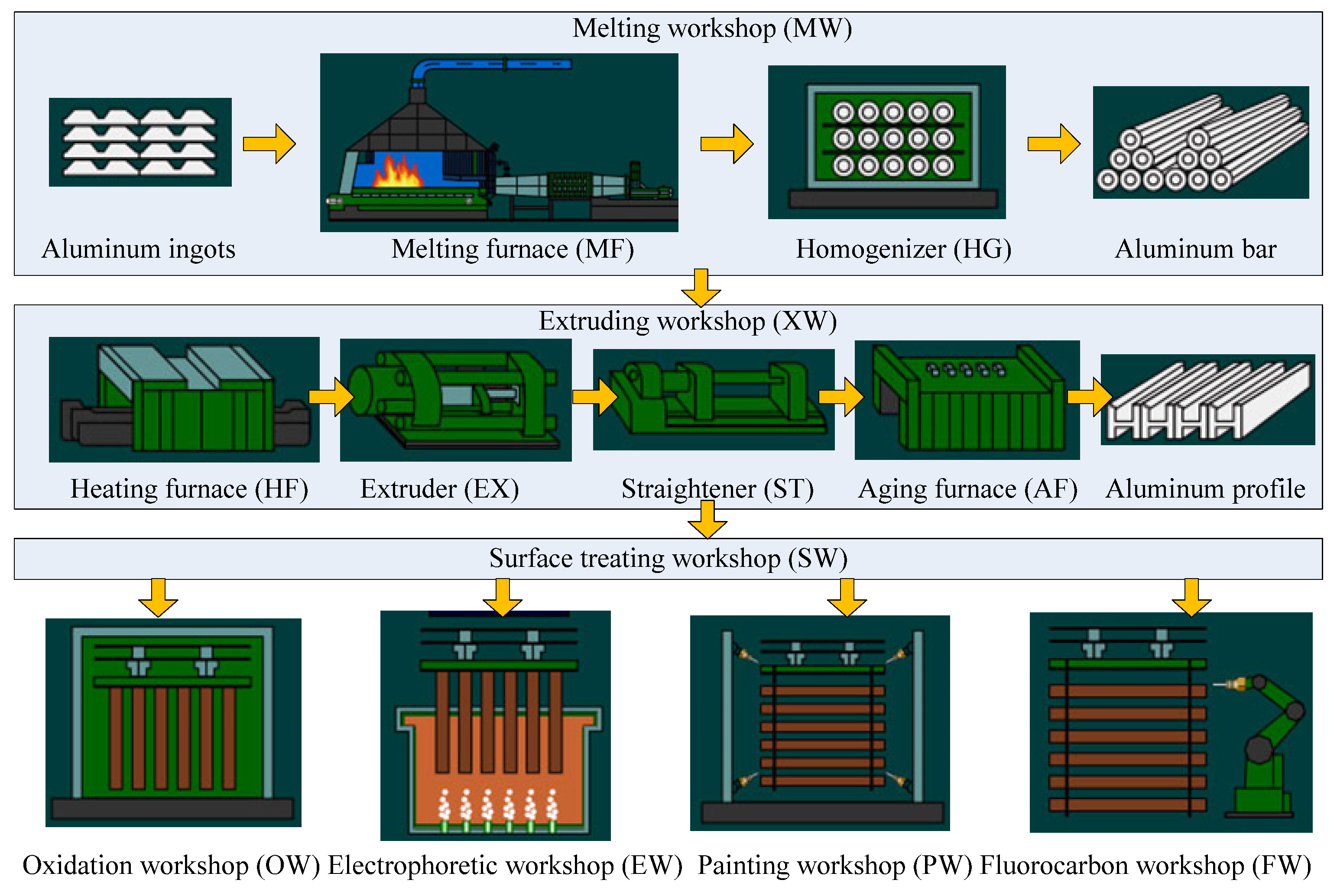
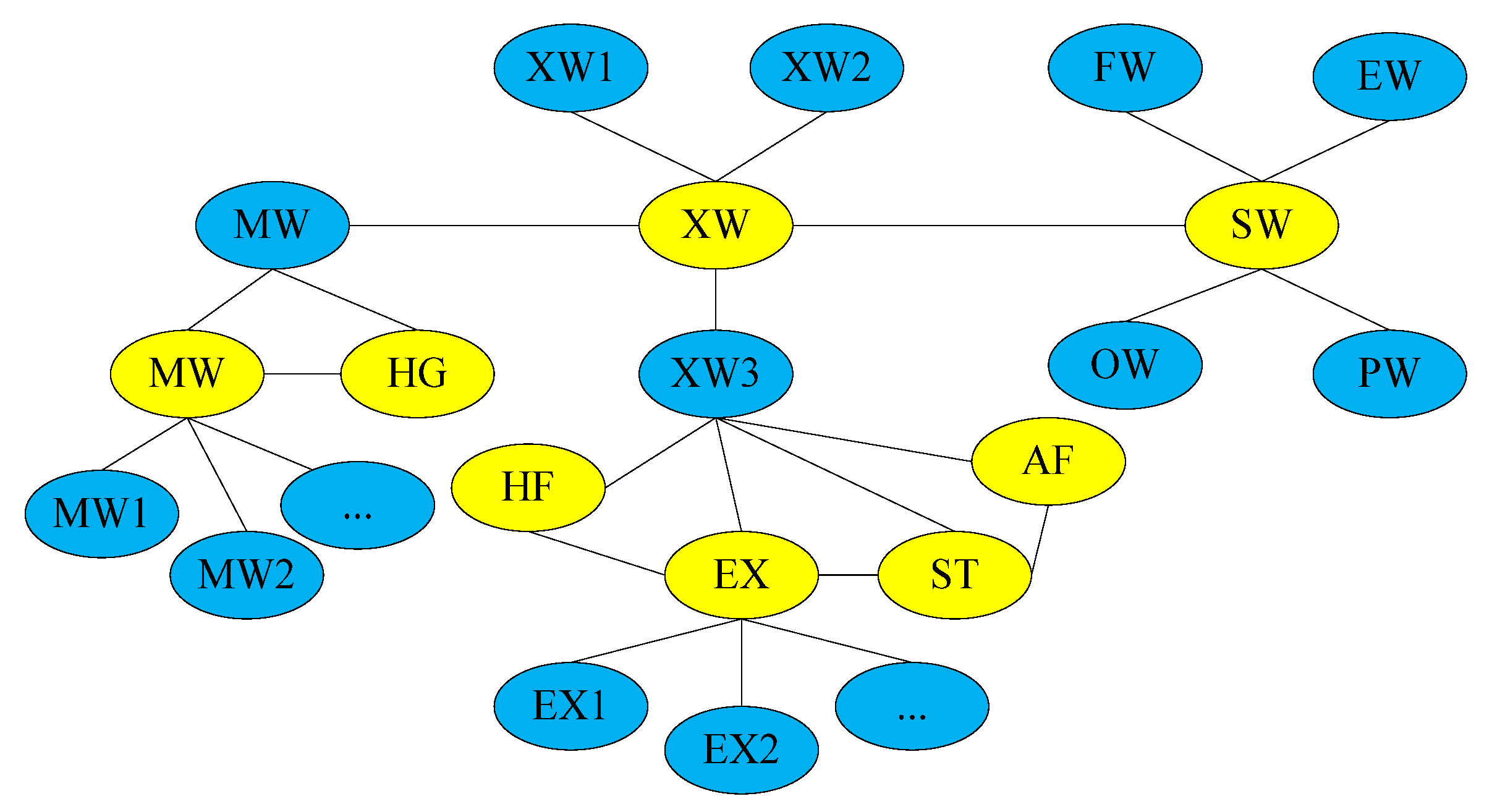
3.1. Application Case
3.1.1. Technology Topology Model
3.1.2. Time Series Datasets
3.2. Evaluation Metrics
3.3. Baseline Methods
3.4. Implementation and Parameter Design
- Three empirical numbers 0 < n1 < n2 < n3 were initially chosen to perform the experiments.
- Experiments with n1, n2 and n3 were performed and their performances were evaluated.
- The three numbers were updated in the new range according to the performance of experiments. If the best was n1, the new range was (0, n1); if the best was n3, it was (n3, +∞); if the best was n2 and the second best was n1, it was (n1, n2), otherwise it was (n2, n3).
- If the new range is small enough, return to the best number; otherwise, repeat Step 2 and Step 3.
3.5. Experimental Results
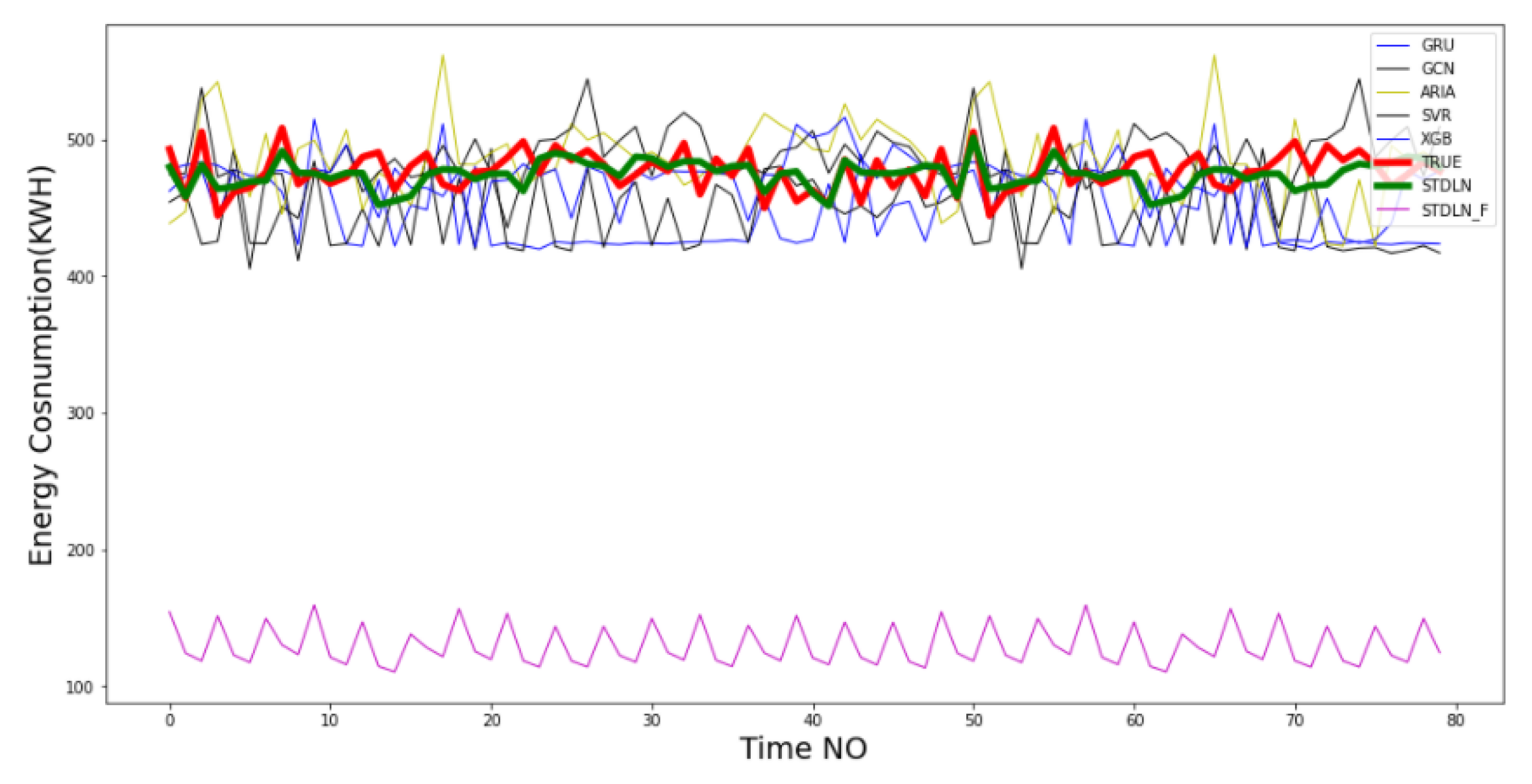
3.5.1. Performance Comparison between the STDLN Method and the Traditional Methods
3.5.2. Performance Comparison between the STDLN method and the Deep Learning Methods
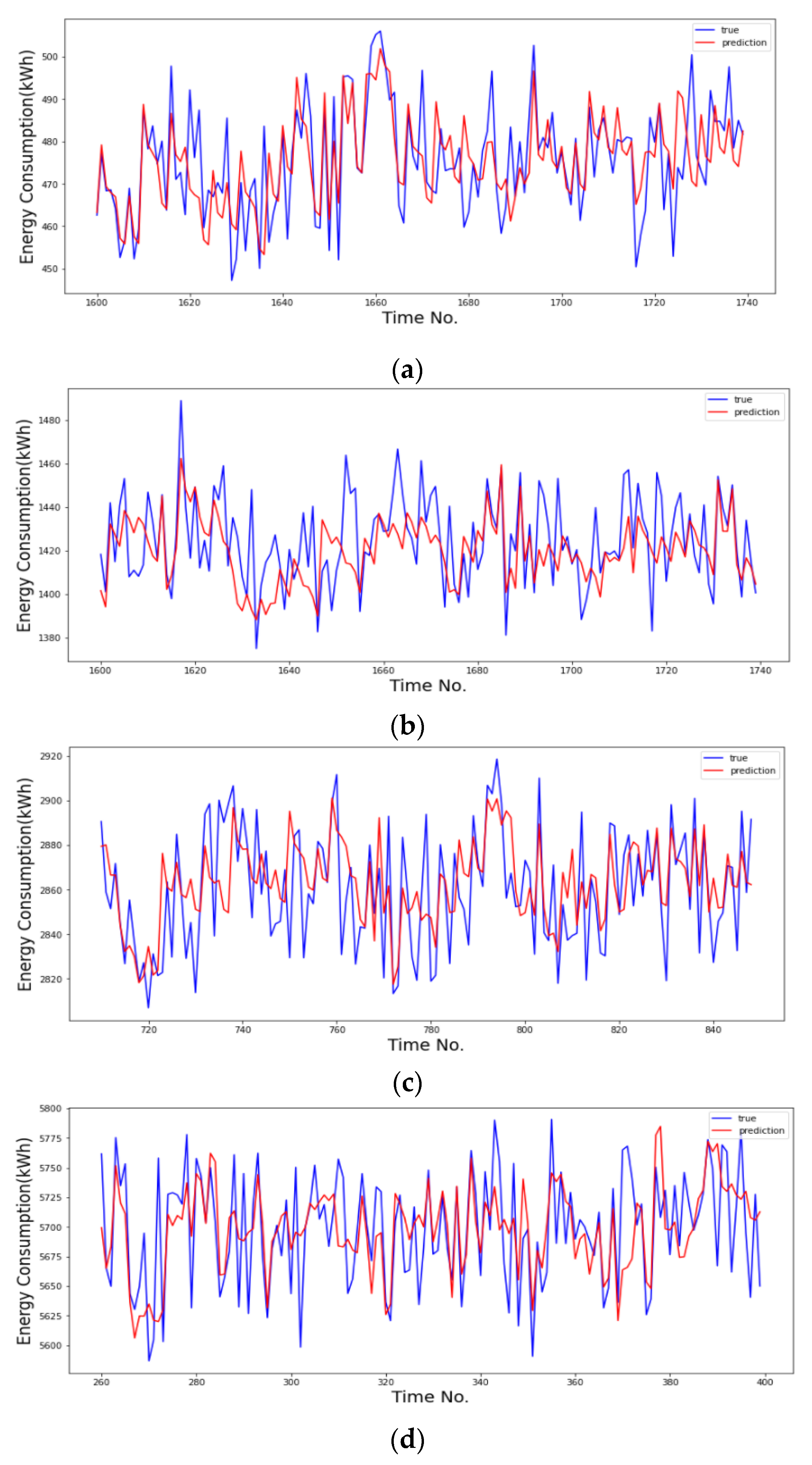
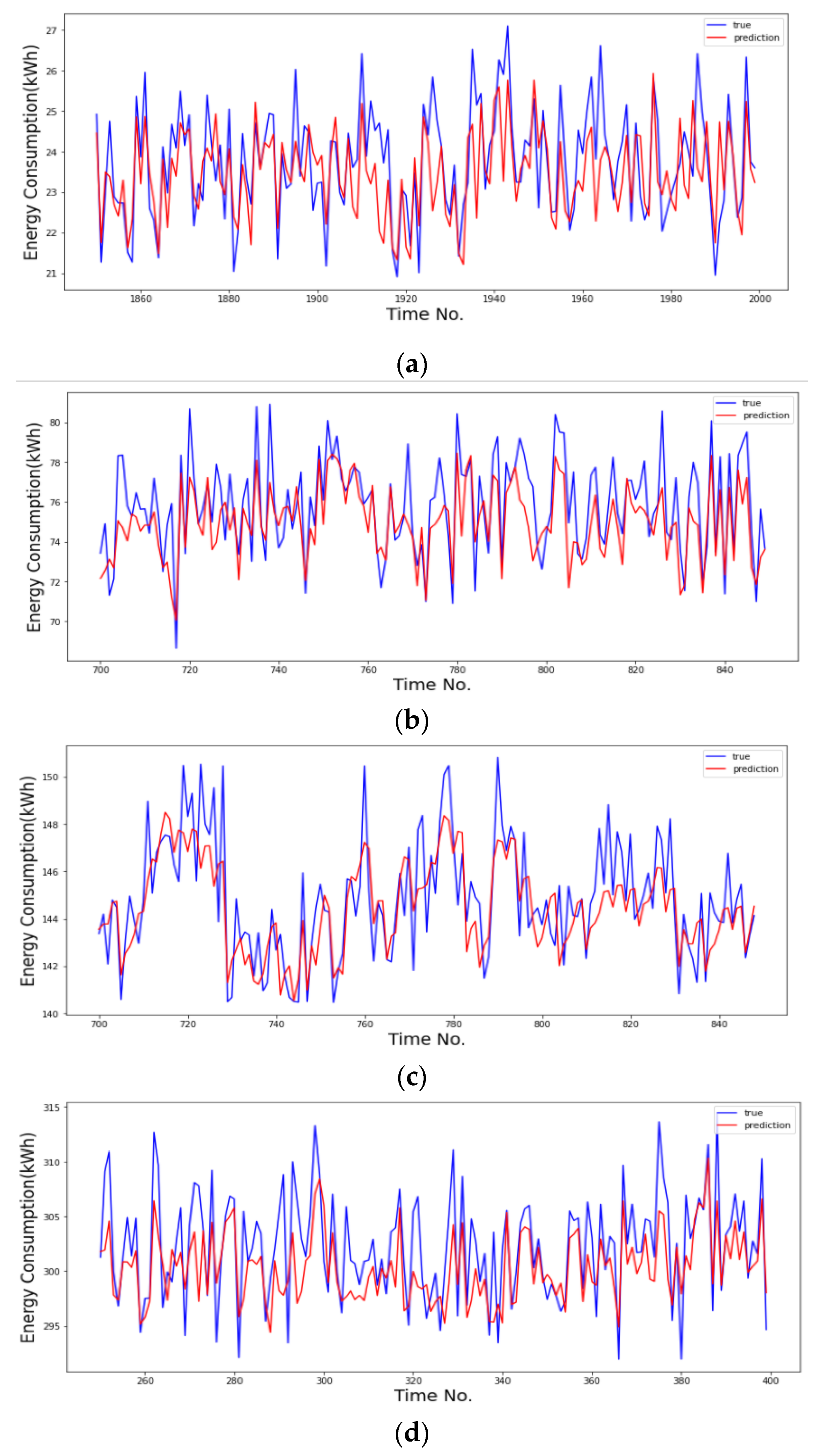
3.5.3. Performance Comparison between the Datasets
3.5.4. Performance Comparison between Production Nodes
4. Discussion
4.1. Discussion of the Effect of GCN and Topology Model of Production Nodes
4.2. Discussion of the Effect of Prediction Period and Production Node Level
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guo, J.; Yang, H. A fault detection method for heat loss in a tyre vulcanization workshop using a dynamic energy consumption model and predictive baselines. Appl. Therm. Eng. 2015, 90, 711–721. [Google Scholar] [CrossRef]
- Li, Y.; Hea, Y.; Wang, Y.; Yan, P.; Liu, X. A framework for characterising energy consumption of machining manufacturing systems. Int. J. Prod. Res. 2014, 52, 314–325. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Yang, H.; Yang, B.; Zhu, C.; Yina, S. Modelling and simulation of energy consumption of ceramic production chains with mixed flows using hybrid Petri nets. Int. J. Prod. Res. 2017, 10, 3007–3024. [Google Scholar] [CrossRef]
- Adenuga, O.T.; Mpofu, K.; Ramatsetse, B.I. Exploring energy efficiency prediction method for Industry 4.0: A reconfigurable vibrating screen case study. Procedia Manuf. 2020, 51, 243–250. [Google Scholar] [CrossRef]
- Rahimifard, S.; Seow, Y.; Childs, T. Minimising Embodied Product Energy to support energy efficient manufacturing. CIRP Ann.-Manuf. Technol. 2010, 59, 25–28. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, F.; Li, C. An integrated method for assessing the energy efficiency of machining workshop. J. Clean. Prod. 2013, 52, 122–133. [Google Scholar] [CrossRef]
- Liu, B.; Verbraeck, A. Multi-resolution modeling based on quotient space and DEVS. Simul. Model. Pract. Theory 2017, 70, 36–51. [Google Scholar] [CrossRef]
- Hu, L.; Liu, Z.; Hua, W.; Wang, Y.; Tan, J.; Wu, F. Petri-net-based dynamic scheduling of flexible manufacturing system via deep reinforcement learning with graph convolutional network. J. Manuf. Syst. 2020, 55, 1–14. [Google Scholar] [CrossRef]
- Han, Z.; Zhao, J.; Leung, H.; Wang, W. Construction of prediction intervals for gas flow systems in steel industry based on granular computing. Control Eng. Pract. 2018, 78, 79–88. [Google Scholar] [CrossRef]
- Brillinger, M.; Wuwer, M.; Hadi, M.A.; Haas, F. Energy prediction for CNC machining with machine learning. CIRP J. Manuf. Sci. Technol. 2021, 35, 715–723. [Google Scholar] [CrossRef]
- Al-Hajj, R.; Assi, A.; Fouad, M.; Mabrouk, E. A Hybrid LSTM-Based Genetic Programming Approach for Short-Term Prediction of Global Solar Radiation Using Weather Data. Processes 2021, 9, 1187. [Google Scholar] [CrossRef]
- Guo, J.; Yang, H. An anti-jamming artificial immune approach for energy leakage diagnosis in parallel-machine job shops. Comput. Ind. 2018, 101, 13–24. [Google Scholar] [CrossRef]
- Kuranga, C.; Pillay, N. A comparative study of nonlinear regression and autoregressive techniques in hybrid with particle swarm optimization for time-series forecasting. Expert Syst. Appl. 2022, 190, 116163. [Google Scholar] [CrossRef]
- Dong, W.; Huang, Y.; Lehane, B.; Ma, G. XGBoost algorithm-based prediction of concrete electrical resistivity for structural health monitoring. Autom. Constr. 2020, 114, 103155. [Google Scholar] [CrossRef]
- Nguyen, Q.-C.; Vu, V.-H.; Thomas, M. A Kalman filter based ARX time series modeling for force identification on flexible manipulators. Mech. Syst. Signal Process. 2022, 169, 108743. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, S.; Xiao, F. A statistical fault detection and diagnosis method for centrifugal chillers based on exponentially-weighted moving average control charts and support vector regression. Appl. Therm. Eng. 2013, 51, 560–572. [Google Scholar] [CrossRef]
- Wang, L.; Liu, Z.; Chen, C.L.P.; Zhang, Y.; Lee, S. Support Vector Machine based optimal control for minimizing energy consumption of biped walking motions. Int. J. Precis. Eng. Manuf. 2012, 13, 1975–1981. [Google Scholar] [CrossRef]
- Zhang, X.-X.; Yuan, H.-Y.; Li, H.-X.; Ma, S.-W. A Spatial Multivariable SVR Method for Spatiotemporal Fuzzy Modeling with Applications to Rapid Thermal Processing. Eur. J. Control 2020, 54, 119–128. [Google Scholar] [CrossRef]
- Jo, T. VTG schemes for using back propagation for multivariate time series prediction. Appl. Soft Comput. 2013, 13, 2692–2702. [Google Scholar] [CrossRef]
- Elman, J.L. Finding Structure in Time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long-Short Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Cho, K.; Merrienboer, B.v.; Gulcehre, C.; Bahdanau, D. Learning Phrase Representations using RNN Encoder–Decoder for Statistical Machine Translation. arXiv 2014, arXiv:1406.1078. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Wang, J.; Yan, J.; Li, C.; Gao, R.X.; Zhao, R. Deep heterogeneous GRU model for predictive analytics in smart manufacturing: Application to tool wear prediction. Comput. Ind. 2019, 111, 1–14. [Google Scholar] [CrossRef]
- Wang, F.; Xuan, Z.; Zhen, Z.; Li, K.; Wang, T.; Shi, M. A day-ahead PV power forecasting method based on LSTM-RNN model and time correlation modification under partial daily pattern prediction framework. Energy Convers. Manag. 2020, 212, 112766. [Google Scholar] [CrossRef]
- He, Y.; Tsang, K.F. Universities power energy management: A novel hybrid model based on iCEEMDAN and Bayesian optimized LSTM. Energy Rep. 2021, 7, 6473–6488. [Google Scholar] [CrossRef]
- Heidari, A.; Khovalyg, D. Short-term energy use prediction of solar-assisted water heating system: Application case of combined attention-based LSTM and time-series Decomposition. Sol. Energy 2020, 207, 626–639. [Google Scholar] [CrossRef]
- Laib, O.; Khadir, M.T.; Mihaylova, L. Toward efficient energy systems based on natural gas consumption prediction with LSTM Recurrent Neural Networks. Energy 2019, 177, 530–542. [Google Scholar] [CrossRef]
- Jang, J.; Han, J.; Leigh, S.-B. Prediction of heating energy consumption with operation pattern variables for non-residential buildings using LSTM networks. Energy Build. 2022, 255, 111647. [Google Scholar] [CrossRef]
- Liu, Y.; Gong, C.; Yang, L.; Chen, Y. DSTP-RNN: A dual-stage two-phase attention-based recurrent neural network for long-term and multivariate time series prediction. Expert Syst. Appl. 2020, 143, 113082. [Google Scholar] [CrossRef]
- Xuan, W.; Shouxiang, W.; Qianyu, Z.; Shaomin, W.; Liwei, F. A multi-energy load prediction model based on deep multi-task learning and ensemble approach for regional integrated energy systems. Electr. Power Energy Syst. 2021, 126, 106583. [Google Scholar] [CrossRef]
- Khan, N.; Haq, I.U.; Khan, S.U.; Rho, S.; Lee, M.Y.; Baik, S.W. DB-Net: A novel dilated CNN based multi-step forecasting model for power consumption in integrated local energy systems. Electr. Power Energy Syst. 2021, 133, 107023. [Google Scholar] [CrossRef]
- Kim, T.-Y.; Cho, S.-B. Predicting residential energy consumption using CNN-LSTM neural networks. Energy 2019, 182, 72–81. [Google Scholar] [CrossRef]
- Sajjad, M.; Khan, Z.A.; Ullah, A.; Hussain, T.; Ullah, W.; Lee, M.; Baik, S.W. A Novel CNN-GRU-Based Hybrid Approach for Short-Term Residential Load Forecasting. IEEE Access 2020, 8, 143759–143768. [Google Scholar] [CrossRef]
- Lu, C.; Li, S.; Lu, Z. Building Energy Prediction Using Artificial Neural Networks: A Literature Survey. Energy Build. 2021, 111718. [Google Scholar] [CrossRef]
- Kipf, T.N.; Welling, M. Semi-Supervised Classification with Graph Convolutional Networks. In Proceedings of the International Conference on Learning Representations, Toulon, France, 24–26 April 2017. [Google Scholar]
- Guo, S.; Lin, Y.; Feng, N.; Song, C.; Wan, H. Attention Based Spatial-Temporal Graph Convolutional Networks for Traffic Flow Forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; pp. 922–929. [Google Scholar]
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Deng, M.; Li, H. T-GCN: A Temporal Graph Convolutional Network for Traffic Prediction. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3848–3858. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Hidden Units | RMSE | MAE | Acc Ratio (-) | R2 Ratio (-) |
|---|---|---|---|---|
| 16 | 10.160 | 5.269 | 0.939 | 0.996 |
| 64 | 8.606 | 4.801 | 0.945 | 0.997 |
| 80 * | 6.301 | 4.320 | 0.953 | 0.998 |
| 90 | 9.560 | 5.108 | 0.940 | 0.996 |
| 100 | 8.384 | 4.263 | 0.946 | 0.997 |
| 128 | 8.741 | 4.261 | 0.944 | 0.997 |
| Dataset | Metrics | XGT | ARIMA | SVR | GRU | GCN | STDLN * | STDLN_F |
|---|---|---|---|---|---|---|---|---|
| 5 min | RMSE | 12.496 | 14.804 | 7.942 | 11.7691 | 7.877 | 6.412 | 17.793 |
| MAE | 10.199 | 11.944 | 4.381 | 8.282 | 12.232 | 3.452 | 18.571 | |
| Acc ratio (-) | 0.694 | 0.652 | 0.634 | 0.910 | 0.610 | 0.961 | 0.173 | |
| R2 ratio (-) | 0.172 | 0.421 | 0.642 | 0.821 | 0.823 | 0.998 | 0.392 | |
| 15 min | RMSE | 56.475 | 76.31 | 46.147 | 35.67 | 33.651 | 31.840 | 134.345 |
| MAE | 80.761 | 69.46 | 60.792 | 56.47 | 27.290 | 16.522 | 146.694 | |
| Acc ratio (-) | 0.478 | 0.314 | 0.516 | 0.671 | 0.742 | 0.945 | 0.172 | |
| R2 ratio (-) | 0.247 | 0.430 | 0.317 | 0.426 | 0.783 | 0.996 | 0.137 | |
| 30 min | RMSE | 68.537 | 51.483 | 28.383 | 51.773 | 447.318 | 57.734 | 106.108 |
| MAE | 56.428 | 37.522 | 21.306 | 16.953 | 132.971 | 29.244 | 295.101 | |
| Acc ratio (-) | 0.412 | 0.391 | 0.637 | 0.955 | 0.611 | 0.957 | 0.155 | |
| R2 ratio (-) | 0.225 | 0.407 | 0.154 | 0.997 | 0.831 | 0.999 | 0.112 | |
| 60 min | RMSE | 73.512 | 84.376 | 66.146 | 99.561 | 894.196 | 132.485 | 1173.267 |
| MAE | 84.374 | 77.153 | 44.046 | 31.646 | 256.101 | 73.247 | 517.062 | |
| Acc ratio (-) | 0.284 | 0.377 | 0.476 | 0.957 | 0.611 | 0.963 | 0.156 | |
| R2 ratio (-) | 0.117 | 0.305 | 0.331 | 0.997 | 0.831 | 0.998 | 0.105 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, J.; Han, M.; Zhan, G.; Liu, S. A Spatio-Temporal Deep Learning Network for the Short-Term Energy Consumption Prediction of Multiple Nodes in Manufacturing Systems. Processes 2022, 10, 476. https://doi.org/10.3390/pr10030476
Guo J, Han M, Zhan G, Liu S. A Spatio-Temporal Deep Learning Network for the Short-Term Energy Consumption Prediction of Multiple Nodes in Manufacturing Systems. Processes. 2022; 10(3):476. https://doi.org/10.3390/pr10030476
Chicago/Turabian StyleGuo, Jianhua, Mingdong Han, Guozhi Zhan, and Shaopeng Liu. 2022. "A Spatio-Temporal Deep Learning Network for the Short-Term Energy Consumption Prediction of Multiple Nodes in Manufacturing Systems" Processes 10, no. 3: 476. https://doi.org/10.3390/pr10030476