
Integration of Sm2Co17 Micromagnets in a Ferromagnetic Multipolar Microrotor to Enhance MEMS and Micromotor Performance
 , , , , and
, , , , and
Abstract
:1. Introduction
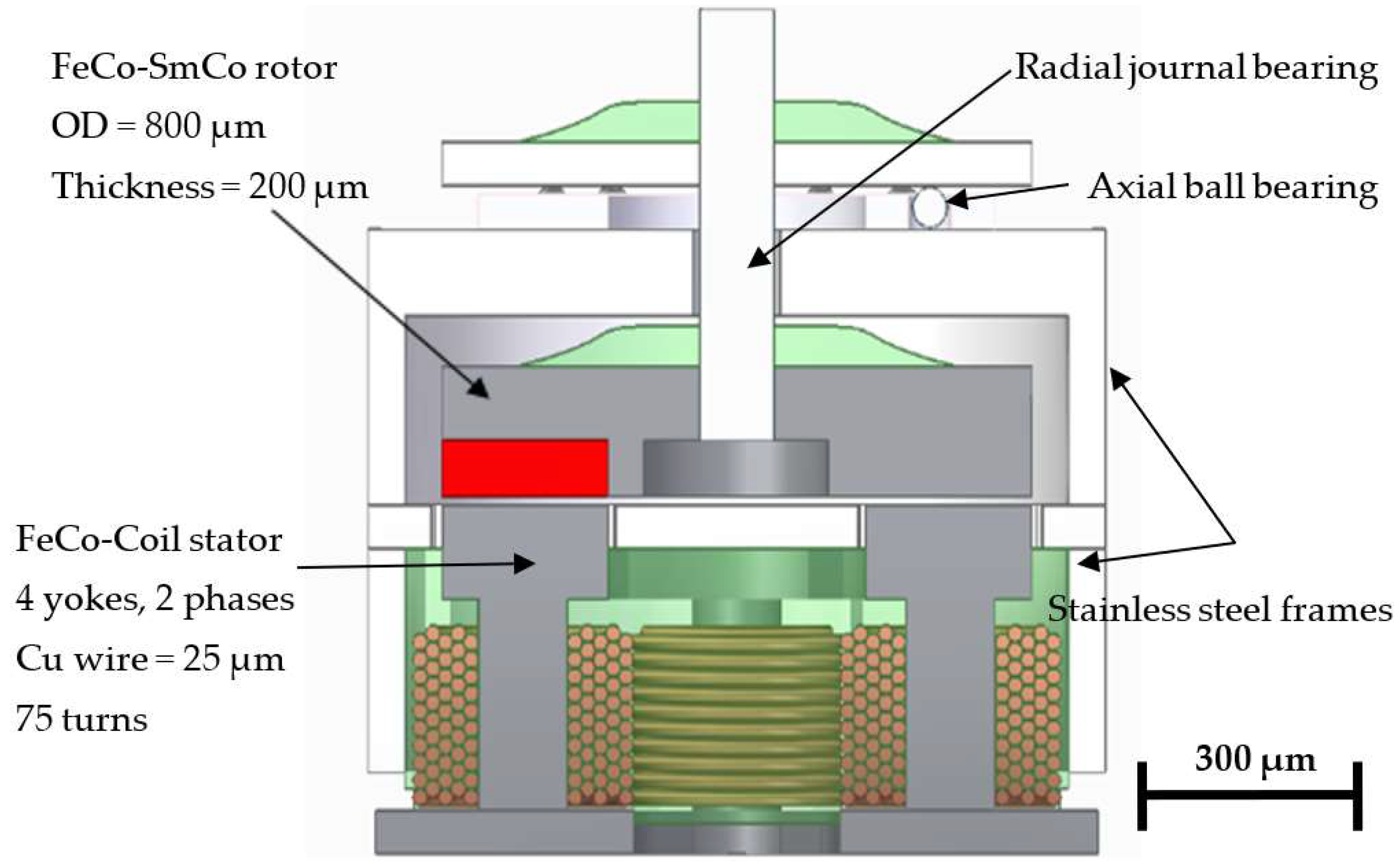
2. MEMS and Micromotor Design
3. Microfabrication of Parts
3.1. Sm2Co17 Micromagnets
3.2. Ferromagnetic Rotor Yoke, Made in Fe49Co49V2
4. Integration Process
4.1. Pick and Release System for Microparts
4.2. Micropositioners
4.3. Magnetization
4.4. Gluing Microdrop System
5. Integration Results
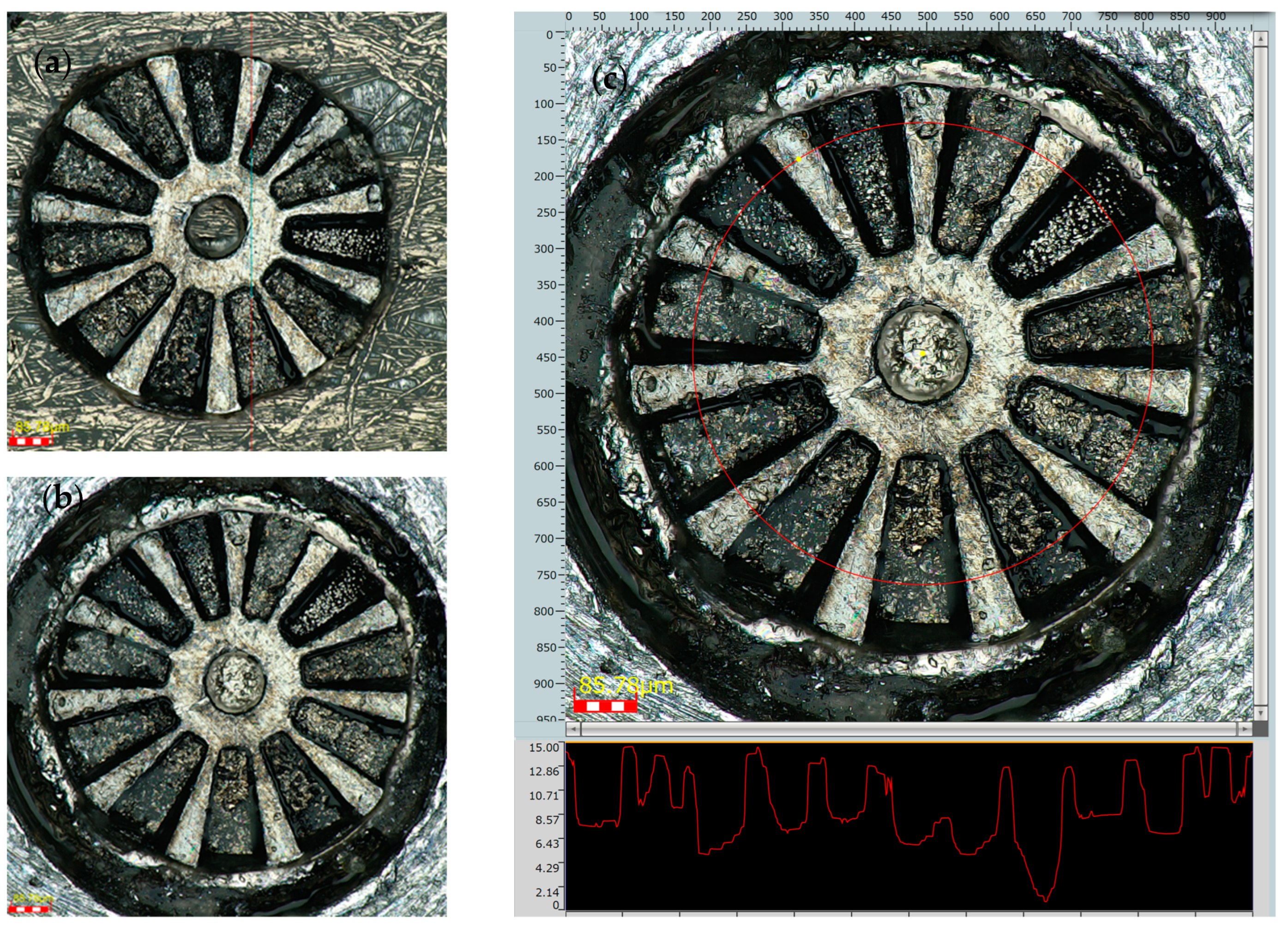
5.1. Geometric Characterization
5.2. Magnetic Characterization
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cao, T.; Hu, T.; Zhao, Y. Research status and development trend of MEMS switches: A review. Micromachines 2020, 11, 694. [Google Scholar] [CrossRef] [PubMed]
- Diez-Jimenez, E. Design and analysis of a non-hysteretic passive magnetic linear bearing for cryogenic environments. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2014, 228, 1071–1079. [Google Scholar] [CrossRef]
- Wu, S.; Zuo, S.; Wu, X.; Lin, F.; Shen, J. Magnet modification to reduce pulsating torque for axial flux permanent magnet synchronous machines. Appl. Comput. Electromagn. Soc. J. 2016, 31, 294–303. [Google Scholar]
- Rezaeealam, B.; Rezaee-Alam, F. Optimization of permanent magnet synchronous motors using conformal mappings. Appl. Comput. Electromagn. Soc. J. 2017, 32, 915–923. [Google Scholar]
- Rizzo, R.; Musolino, A.; Bucchi, F.; Forte, P.; Frendo, F. A multi-gap magnetorheological clutch with permanent magnet. Smart Mater. Struct. 2015, 24, 075012. [Google Scholar] [CrossRef]
- Rizzo, R. An innovative multi-gap clutch based on magneto-rheological fluids and electrodynamic effects: Magnetic design and experimental characterization. Smart Mater. Struct. 2017, 26, 015007. [Google Scholar] [CrossRef]
- Rizzo, R.; Musolino, A.; Lai, H.C. An Electrodynamic/Magnetorheological Clutch Powered by Permanent Magnets. IEEE Trans. Magn. 2017, 53, 8000307. [Google Scholar] [CrossRef]
- Hua, D.; Liu, X.; Li, Z.; Fracz, P.; Hnydiuk-Stefan, A.; Li, Z. A Review on Structural Configurations of Magnetorheological Fluid Based Devices Reported in 2018–2020. Front. Mater. 2021, 8, 640102. [Google Scholar] [CrossRef]
- Muñoz-Martínez, M.; Diez-Jimenez, E.; Gómez-García, M.J.; Rizzo, R.; Musolino, A. Torque and bearing reaction forces simulation of micro-magnetic gears. Appl. Comput. Electromagn. Soc. J. 2019, 34, 541–546. [Google Scholar]
- Ruiz-Ponce, G.; Arjona, M.A.; Hernandez, C.; Escarela-Perez, R. A Review of Magnetic Gear Technologies Used in Mechanical Power Transmission. Energies 2023, 16, 1721. [Google Scholar] [CrossRef]
- Sodano, H.A.; Bae, J.S. Eddy current damping in structures. Shock Vib. Dig. 2004, 36, 469–478. [Google Scholar] [CrossRef]
- Barmada, S.; Musolino, A.; Rizzo, R. Equivalent network approach for the simulation of MEMS devices. Appl. Comput. Electromagn. Soc. J. 2006, 21, 16–25. [Google Scholar]
- Baltzer, M.; Obermeier, E. A micro shutter for applications in optical and thermal detectors. In Proceedings of the International Solid State Sensors and Actuators Conference (Transducers’ 97), Chicago, IL, USA, 19 June 1997; pp. 67–70. [Google Scholar]
- Mourlas, N.J.; Stark, K.C.; Mehregany, M.; Phillips, S.M. Exploring polysilicon micromotors for data storage micro disks. In Proceedings of the Ninth International Workshop on Micro Electromechanical Systems, San Diego, CA, USA, 11–15 February 1996; pp. 198–203. [Google Scholar] [CrossRef]
- Serrano-Tellez, J.; Romera-Juarez, F.; González-de-María, D.; Lamensans, M.; Argelaguet-Vilaseca, H.; Pérez-Díaz, J.-L.; Sánchez-Casarrubios, J.; Diez-Jimenez, E.; Valiente-Blanco, I. Experience on a cryogenic linear mechanism based on superconducting levitation. In Proceedings of the Conference on Modern Technologies in Space-and Ground-Based Telescopes and Instrumentation II, Amsterdam, The Netherlands, 1–6 July 2012; SPIE-INT SOC OPTICAL ENGINEERING. p. 84501Y-84501Y–9. [Google Scholar]
- Bodnicki, M.; Wierciak, J.; Credo, W.; Bagiński, K.; Wawrzyniuk, L. Electromagnetic angular positioner based on DC micromotor. MATEC Web Conf. 2018, 157, 03003. [Google Scholar] [CrossRef]
- Suzumori, K.; Miyagawa, T.; Kimura, M.; Hasegawa, Y. Micro inspection robot for 1-in pipes. IEEE/ASME Trans. Mechatron. 1999, 4, 286–292. [Google Scholar] [CrossRef]
- Thielicke, E.; Obermeier, E. Microactuators and their technologies. Mechatronics 2000, 10, 431–455. [Google Scholar] [CrossRef]
- Shumbayawonda, E.; Salifu, A.A.; Lekakou, C.; Cosmas, J.P. Numerical and experimental simulations of the wireless energy transmission and harvesting by a camera pill. J. Med. Devices Trans. ASME 2018, 12, 021002. [Google Scholar] [CrossRef]
- Sheerer, C.D.; Drozek, D.; Choi, J. A hand-held device for controlling a mounted, motor driven colonoscope. J. Med. Devices Trans. ASME 2015, 9, 021002. [Google Scholar]
- Peng, J.; Ma, L.; Li, X.; Tang, H.; Li, Y.; Chen, S. A Novel Synchronous Micro Motor for Intravascular Ultrasound Imaging. IEEE Trans. Biomed. Eng. 2019, 66, 802–809. [Google Scholar] [CrossRef] [PubMed]
- Kode, V.R.C.; Çavuşoǧlu, M.C. Design and characterization of a novel hybrid actuator using shape memory alloy and DC micromotor for minimally invasive surgery applications. IEEE/ASME Trans. Mechatron. 2007, 12, 455–464. [Google Scholar] [CrossRef]
- Munoz, F.; Alici, G.; Li, W. A magnetically actuated drug delivery system for robotic endoscopic capsules. J. Med. Devices Trans. ASME 2016, 10, 011004. [Google Scholar] [CrossRef]
- Villalba-Alumbreros, G.; Moron-Alguacil, C.; Fernandez-Munoz, M.; Valiente-Blanco, I.; Diez-Jimenez, E. Scale Effects on Performance of BLDC Micromotors for Internal Biomedical Applications: A Finite Element Analysis. J. Med. Devices 2022, 16, 031011. [Google Scholar] [CrossRef]
- Perez-Diaz, J.L.; Diez-Jimenez, E.; Valiente-Blanco, I.; Cristache, C.; Alvarez-Valenzuela, M.-A.; Sanchez-Garcia-Casarrubios, J. Contactless mechanical components: Gears, torque limiters and bearings. Machines 2014, 2, 312. [Google Scholar] [CrossRef]
- Perez-Diaz, J.L.; Diez-Jimenez, E.; Valiente-Blanco, I.; Cristache, C.; Alvarez-Valenzuela, M.-A.; Sanchez-Garcia-Casarrubios, J.; Ferdeghini, C.; Canepa, F.; Hornig, W.; Carbone, G.; et al. Performance of Magnetic-Superconductor Non-contact Harmonic Drive for Cryogenic space applications. Machines 2015, 3, 138–156. [Google Scholar] [CrossRef]
- Diez-Jimenez, E.; Sanchez-Montero, R.; Martinez-Muñoz, M. Towards miniaturization of magnetic gears: Torque performance assessment. Micromachines 2017, 9, 16. [Google Scholar] [CrossRef] [PubMed]
- Lu, Z.; Huang, B.; Zhang, Q.; Lu, X. Experimental and analytical study on vibration control effects of eddy-current tuned mass dampers under seismic excitations. J. Sound Vib. 2018, 421, 153–165. [Google Scholar] [CrossRef]
- Diez-Jimenez, E.; Perez-Diaz, J.L. Flip effect in the orientation of a magnet levitating over a superconducting torus in the Meissner state. Phys. C Supercond. 2011, 471, 8–11. [Google Scholar] [CrossRef]
- Jayhooni, S.M.H.; Assadsangabi, B.; Takahata, K. A stepping micromotor based on ferrofluid bearing for side-viewing microendoscope applications. Sens. Actuators A Phys. 2018, 269, 258–268. [Google Scholar] [CrossRef]
- Waldschik, A.; Feldmann, M.; Seidemann, V.; Büttgenbach, S. Development and Fabrication of Electromagnetic Microactuators. In Design and Manufacturing of Active Microsystems; Waldschik, A., Feldmann, M., Seidemann, V., Büttgenbach, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 207–224. [Google Scholar]
- Koser, H.; Lang, J.H. Magnetic Induction Micromachine—Part II: Fabrication and Testing Florent. J. Microelectromechanical Syst. 2006, 15, 415–426. [Google Scholar] [CrossRef]
- Kim, J.H.; Jung, I.S.; Sung, H.G. Design and manufacturing of ultra small actuator. In Proceedings of the 2006 IEEE International Conference on Mechatronics, ICM, Bangkok, Thailand, 7–9 June 2006; pp. 23–26. [Google Scholar]
- Zhilichev, Y.N. Precise multipole magnetization of disc magnet for sensor application. IEEE Trans. Magn. 2003, 39, 3301–3303. [Google Scholar] [CrossRef]
- Martinez-Muñoz, M.; DIez-Jimenez, E.; Sanchez-Montero, R.; Lopez-Espi, P.L.; Martinez-Rojas, J.A. Analysis of the geometric parameters influence in PCB fixtures for 2D multipole magnetization patterning of thin layer micro-magnets. Int. J. Appl. Electromagn. Mech. 2019, 61, 59–71. [Google Scholar] [CrossRef]
- Martinez-Muñoz, M.; Diez-Jimenez, E.; Villalba-Alumbreros, G.V.; Michalowski, M.; Lastra-Sedano, A. Geometrical dependence in fixtures for 2D multipole micromagnets magnetization pattering. Appl. Comput. Electromagn. Soc. J. 2019, 34, 1092–1101. [Google Scholar]
- Le Bec, G.; Chavanne, J.; Benabderrahmane, C. Simulation of NdFeB Permanent Magnets at Low Temperature. In Proceedings of the PAC09, Vancouver, BC, Canada, 4–8 May 2009; pp. 327–329. [Google Scholar]
- Hou, L.; Shi, L.; Zhao, J.; Pan, S.; Xin, Y.; Yuan, X. Spin-Reorientation Transition Driven by Double Exchange in CeFeO3Ceramics. J. Phys. Chem. C 2020, 124, 15399–15405. [Google Scholar] [CrossRef]
- Garraud, A.; Oniku, O.D.; Patterson, W.C.; Shorman, E.; Le Roy, D.; Dempsey, N.M.; Arnold, D.P. Microscale magnetic patterning of hard magnetic films using microfabricated magnetizing masks. In Proceedings of the 2014 IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014; pp. 520–523. [Google Scholar] [CrossRef]
- Fujiwara, R.; Tanaka, S.; Hijikata, W.; Shinshi, T.; Hirotaki, K.; Yamashita, A.; Nakano, M. Micromachining and micro-magnetization of Pr-Fe-B magnets fabricated using pulsed laser deposition for MEMS applications. Sens. Actuators A Phys. 2016, 251, 219–224. [Google Scholar] [CrossRef]
- Fujiwara, R.; Hijikata, W.; Shinshi, T. Micrometer scale magnetization of neodymium magnet for integrated magnetic MEMS. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016; IEEE: Piscateville, NJ, USA, 2016; Volume 2016, pp. 643–646. [Google Scholar]
- Dumas-Bouchiat, F.; Zanini, L.F.; Kustov, M.; Dempsey, N.M.; Grechishkin, R.; Hasselbach, K.; Orlianges, J.C.; Champeaux, C.; Catherinot, A.; Givord, D. Thermomagnetically patterned micromagnets. Appl. Phys. Lett. 2010, 96, 102511. [Google Scholar] [CrossRef]
- Fullerton, L. System and Method for Producing Magnetic Structures. U.S. Patent 20150137919A1, 14 July 2015. [Google Scholar]
- Catalog of Polymagnets (R). Available online: http://www.polymagnet.com/ (accessed on 1 April 2020).
- Michałowski, M.; Fernandez-munoz, M.; Samsel, M.J.; Cha, A. Tribological Characterization of Micro Ball Bearings with and without Solid-State Lubrication. Micromachines 2023, 14, 1775. [Google Scholar] [CrossRef] [PubMed]
- Villalba-Alumbreros, G.; Soler-Morala, J.; Bollero, A.; Kanitz, A.; Hoppius, J.; Valiente-Blanco, I.; Diez-Jimenez, E. Microfabrication of Sm2Co17 micromagnets for MEMS and micromotors using ultrashort pulsed hydro laser micromilling process. Int. J. Adv. Manuf. Technol. 2023, 129, 4961–4970. [Google Scholar] [CrossRef]
- Villalba-Alumbreros, G.; Lopez-Camara, E.; Martínez-Gómez, J.; Cobreces, S.; Valiente-Blanco, I.; Diez-Jimenez, E. Experimental study of micromilling process and deburring electropolishing process on FeCo-based soft magnetic alloys. Int. J. Adv. Manuf. Technol. 2023, 126, 3235–3248. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Multipolar Alternating Magnetization Direction | Multipolar Single Magnetization Direction | |
|---|---|---|
| Torque (μNm) | 2.03 | 2.15 |
| Current (A) | 3.8 | 3.8 |
| Torque density (kNm/m3) | 7.98 | 8.45 |
| Cogging torque (%) | 5.6 | 4 |
| Axial load bearing (mN) | 68 | 70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diez-Jimenez, E.; Bollero, A.; Valiente-Blanco, I.; Palmero, E.M.; Fernandez-Munoz, M.; Lopez-Pascual, D.; Villalba-Alumbreros, G. Integration of Sm2Co17 Micromagnets in a Ferromagnetic Multipolar Microrotor to Enhance MEMS and Micromotor Performance. Micromachines 2024, 15, 875. https://doi.org/10.3390/mi15070875
Diez-Jimenez E, Bollero A, Valiente-Blanco I, Palmero EM, Fernandez-Munoz M, Lopez-Pascual D, Villalba-Alumbreros G. Integration of Sm2Co17 Micromagnets in a Ferromagnetic Multipolar Microrotor to Enhance MEMS and Micromotor Performance. Micromachines. 2024; 15(7):875. https://doi.org/10.3390/mi15070875
Chicago/Turabian StyleDiez-Jimenez, Efren, Alberto Bollero, Ignacio Valiente-Blanco, Ester M. Palmero, Miguel Fernandez-Munoz, Diego Lopez-Pascual, and Gabriel Villalba-Alumbreros. 2024. "Integration of Sm2Co17 Micromagnets in a Ferromagnetic Multipolar Microrotor to Enhance MEMS and Micromotor Performance" Micromachines 15, no. 7: 875. https://doi.org/10.3390/mi15070875