
Matlab S Function Ref
Uploaded by
aryamasMatlab S Function Ref
Uploaded by
aryamasSimulink
7
Writing S-Functions
How to Contact The MathWorks
www.mathworks.com Web
comp.soft-sys.matlab Newsgroup
www.mathworks.com/contact_TS.html Technical Support
suggest@mathworks.com Product enhancement suggestions
bugs@mathworks.com Bug reports
doc@mathworks.com Documentation error reports
service@mathworks.com Order status, license renewals, passcodes
info@mathworks.com Sales, pricing, and general information
508-647-7000 (Phone)
508-647-7001 (Fax)
The MathWorks, Inc.
3 Apple Hill Drive
Natick, MA 01760-2098
For contact information about worldwide offices, see the MathWorks Web site.
Writing S-Functions
COPYRIGHT 19982007 by The MathWorks, Inc.
The software described in this document is furnished under a license agreement. The software may be used
or copied only under the terms of the license agreement. No part of this manual may be photocopied or
reproduced in any form without prior written consent from The MathWorks, Inc.
FEDERAL ACQUISITION: This provision applies to all acquisitions of the Program and Documentation
by, for, or through the federal government of the United States. By accepting delivery of the Program or
Documentation, the government hereby agrees that this software or documentation qualifies as commercial
computer software or commercial computer software documentation as such terms are used or defined
in FAR 12.212, DFARS Part 227.72, and DFARS 252.227-7014. Accordingly, the terms and conditions of
this Agreement and only those rights specified in this Agreement, shall pertain to and govern the use,
modification, reproduction, release, performance, display, and disclosure of the Program and Documentation
by the federal government (or other entity acquiring for or through the federal government) and shall
supersede any conflicting contractual terms or conditions. If this License fails to meet the governments
needs or is inconsistent in any respect with federal procurement law, the government agrees to return the
Program and Documentation, unused, to The MathWorks, Inc.
Trademarks
MATLAB, Simulink, Stateflow, Handle Graphics, Real-Time Workshop, SimBiology,
SimHydraulics, SimEvents, and xPC TargetBox are registered trademarks and The
MathWorks, the L-shaped membrane logo, Embedded MATLAB, and PolySpace are
trademarks of The MathWorks, Inc.
Other product or brand names are trademarks or registered trademarks of their respective
holders.
Patents
The MathWorks products are protected by one or more U.S. patents. Please see
www.mathworks.com/patents for more information.
Revision History
October 1998 First printing Revised for Simulink 3.0 (Release R11)
November 2000 Second printing Revised for Simulink 4.0 (Release R12)
July 2002 Third printing Revised for Simulink 5.0 Release R13)
April 2003 Online only Revised for Simulink 5.1 (Release R13SP1)
April 2004 Online only Revised for Simulink 5.1.1 (Release R13SP1+)
June 2004 Online only Revised for Simulink 6.0 (Release R14)
October 2004 Online only Revised for Simulink 6.1 (Release R14SP1)
March 2005 Online only Revised for Simulink 6.2 (Release R14SP2)
September 2005 Online Only Revised for Simulink 6.3 (Release R14SP3)
March 2006 Online only Revised for Simulink 6.4 (Release 2006a)
September 2006 Online only Revised for Simulink 6.5 (Release 2006b)
March 2007 Online only Revised for Simulink 6.6 (Release 2007a)
September 2007 Online only Revised for Simulink 7.0 (Release 2007b)
Contents
Overview of S-Functions
1
What Is an S-Function? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Using S-Functions in Models . . . . . . . . . . . . . . . . . . . . . . . . 1-3
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
Passing Parameters to S-Functions . . . . . . . . . . . . . . . . . . . 1-5
When to Use an S-Function . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
How S-Functions Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
Mathematics of Simulink Blocks . . . . . . . . . . . . . . . . . . . . . 1-7
Simulation Stages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-8
S-Function Callback Methods . . . . . . . . . . . . . . . . . . . . . . . 1-9
Implementing S-Functions . . . . . . . . . . . . . . . . . . . . . . . . . 1-11
M-File S-Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-11
MEX-File S-Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-12
S-Function Concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-14
Direct Feedthrough . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-14
Dynamically Sized Arrays . . . . . . . . . . . . . . . . . . . . . . . . . . 1-15
Setting Sample Times and Offsets . . . . . . . . . . . . . . . . . . . . 1-16
S-Function Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-20
Overview of Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-20
Level-2 M-File S-Function Examples . . . . . . . . . . . . . . . . . . 1-22
Level-1 M-File S-Function Examples . . . . . . . . . . . . . . . . . . 1-22
C S-Function Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-25
Fortran S-Function Examples . . . . . . . . . . . . . . . . . . . . . . . 1-29
C++ S-Function Examples . . . . . . . . . . . . . . . . . . . . . . . . . . 1-30
Ada S-Function Examples . . . . . . . . . . . . . . . . . . . . . . . . . . 1-30
v
Writing S-Functions in M
2
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Writing Level-2 M-File S-Functions . . . . . . . . . . . . . . . . . . 2-3
About Level-2 M-File S-Functions . . . . . . . . . . . . . . . . . . . . 2-3
Level-2 M-File S-Function API . . . . . . . . . . . . . . . . . . . . . . . 2-4
M-File S-Function Demos . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
S-Function Template . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Instantiating a Level-2 M-File S-Function . . . . . . . . . . . . . 2-4
Generating Code from a Level-2 M-File S-Function . . . . . . 2-5
Callback Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
Setup Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
Run-time Object . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
Maintaining Level-1 M-File S-Functions . . . . . . . . . . . . . 2-9
About the Maintenance of Level-1 M-File S-Functions . . . 2-9
S-Function Arguments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
S-Function Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
Defining S-Function Block Characteristics . . . . . . . . . . . . . 2-12
Processing S-Function Parameters . . . . . . . . . . . . . . . . . . . 2-13
Converting Level-1 M-File S-functions to Level-2 . . . . . . . . 2-13
Writing S-Functions in C
3
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
About Writing C S-Functions . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Creating C MEX S-Functions . . . . . . . . . . . . . . . . . . . . . . . . 3-4
Building S-Functions Automatically . . . . . . . . . . . . . . . . . 3-6
About Building S-Functions Automatically . . . . . . . . . . . . . 3-6
Deploying the Generated S-Function . . . . . . . . . . . . . . . . . . 3-9
How the S-Function Builder Builds an S-Function . . . . . . 3-10
S-Function Builder Dialog Box . . . . . . . . . . . . . . . . . . . . . . 3-11
About S-Function Builder . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-11
vi Contents
Parameters/S-Function Name Pane . . . . . . . . . . . . . . . . . . . 3-13
Port/Parameter Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-14
Initialization Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-14
Data Properties Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-16
Input Ports Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-18
Output Ports Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-19
Parameters Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-21
Data Type Attributes Pane . . . . . . . . . . . . . . . . . . . . . . . . . . 3-22
Libraries Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-23
Outputs Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-25
Continuous Derivatives Pane . . . . . . . . . . . . . . . . . . . . . . . . 3-29
Discrete Update Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-31
Build Info Pane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-33
Example: Modeling a Two-Input/Two-Output System . . . . 3-35
Example of a Basic C MEX S-Function . . . . . . . . . . . . . . . 3-41
Introducing an Example of a Basic C MEX S-Function . . . 3-41
Defines and Includes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-44
Callback Implementations . . . . . . . . . . . . . . . . . . . . . . . . . . 3-44
Simulink/Real-Time Workshop Interface . . . . . . . . . . . . . . 3-46
Building the Timestwo Example . . . . . . . . . . . . . . . . . . . . . 3-46
Templates for C S-Functions . . . . . . . . . . . . . . . . . . . . . . . . 3-48
About the Templates for C S-Functions . . . . . . . . . . . . . . . . 3-48
S-Function Source File Requirements . . . . . . . . . . . . . . . . . 3-48
The SimStruct . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-51
Data Types in S-Functions . . . . . . . . . . . . . . . . . . . . . . . . . . 3-51
Compiling C S-Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-51
Integrating Existing C Functions into Simulink Models
with the Legacy Code Tool . . . . . . . . . . . . . . . . . . . . . . . 3-53
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-53
Example of Integrating Existing C Functions into Simulink
Models with the Legacy Code Tool . . . . . . . . . . . . . . . . . . 3-56
Registering Legacy Code Tool Data Structures . . . . . . . . . . 3-60
Declaring Legacy Code Tool Function Specifications . . . . . 3-62
Generating and Compiling the S-Functions . . . . . . . . . . . . 3-69
Generating a Masked S-Function Block for Calling a
Generated S-Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-70
Forcing Accelerator Mode to Use S-Function TLC Inlining
Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-71
Handling Multiple Registration Files . . . . . . . . . . . . . . . . . 3-71
Deploying Generated S-Functions . . . . . . . . . . . . . . . . . . . . 3-72
vii
Legacy Code Tool Demos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-72
Legacy Code Tool Limitations . . . . . . . . . . . . . . . . . . . . . . . 3-73
How Simulink Interacts with C S-Functions . . . . . . . . . 3-74
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-74
Process View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-74
Data View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-78
Writing Callback Methods . . . . . . . . . . . . . . . . . . . . . . . . . . 3-82
Using S-Functions in Normal Mode Referenced
Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-83
Debugging C MEX S-Functions . . . . . . . . . . . . . . . . . . . . . . 3-85
About Debugging C MEX S-Functions . . . . . . . . . . . . . . . . . 3-85
Debugging C MEX S-Functions Using Microsoft Visual
C/C++ .NET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-85
Debugging C MEX S-Functions Using UNIX . . . . . . . . . . . 3-86
Converting Level 1 C MEX S-Functions to Level 2 . . . . 3-89
Guidelines for Converting Level 1 C MEX S-Functions to
Level 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-89
Obsolete Macros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-92
Creating C++ S-Functions
4
Source File Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Making C++ Objects Persistent . . . . . . . . . . . . . . . . . . . . . . 4-6
Building C++ S-Functions . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
viii Contents
Creating Ada S-Functions
5
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
About Simulink and Ada . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Ada Compiler Requirements . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Ada S-Function Source File Format . . . . . . . . . . . . . . . . . 5-4
Ada S-Function Specification . . . . . . . . . . . . . . . . . . . . . . . . 5-4
Ada S-Function Body . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
Writing Callback Methods in Ada . . . . . . . . . . . . . . . . . . . 5-8
Callbacks Invoked by Simulink . . . . . . . . . . . . . . . . . . . . . . 5-8
Implementing Callbacks . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
Omitting Optional Callback Methods . . . . . . . . . . . . . . . . . 5-10
SimStruct Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
Building an Ada S-Function . . . . . . . . . . . . . . . . . . . . . . . . 5-11
Example of an Ada S-Function . . . . . . . . . . . . . . . . . . . . . . 5-12
Overview of an Example of an Ada S-Function . . . . . . . . . . 5-12
Times_two Package Specification . . . . . . . . . . . . . . . . . . . . . 5-13
Times_two Package Body . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-16
mdlInitializeSizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-18
mdlOutputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-18
Building the Times_two Example . . . . . . . . . . . . . . . . . . . . 5-19
Creating Fortran S-Functions
6
Level 1 Versus Level 2 S-Functions . . . . . . . . . . . . . . . . . . 6-2
Creating Level 1 Fortran S-Functions . . . . . . . . . . . . . . . 6-3
Fortran MEX Template File . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
Example of a Level 1 Fortran S-Function . . . . . . . . . . . . . . 6-3
Inline Code Generation Example . . . . . . . . . . . . . . . . . . . . . 6-6
ix
Creating Level 2 Fortran S-Functions . . . . . . . . . . . . . . . 6-8
About Creating Level 2 Fortran S-Functions . . . . . . . . . . . 6-8
Template File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-8
C/Fortran Interfacing Tips . . . . . . . . . . . . . . . . . . . . . . . . . . 6-8
Constructing the Gateway . . . . . . . . . . . . . . . . . . . . . . . . . . 6-13
Example C MEX S-Function Calling Fortran Code . . . . . . 6-16
Porting Legacy Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-19
Find the States . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-19
Sample Times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-20
Multiple Instances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-20
Use Flints if Needed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-20
Considerations for Real Time . . . . . . . . . . . . . . . . . . . . . . . . 6-20
Implementing Block Features
7
Dialog Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-2
About Dialog Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-2
Tunable Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-4
Run-Time Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-7
About Run-Time Parameters . . . . . . . . . . . . . . . . . . . . . . . . 7-7
Creating Run-Time Parameters . . . . . . . . . . . . . . . . . . . . . . 7-8
Updating Run-Time Parameters . . . . . . . . . . . . . . . . . . . . . 7-14
Tuning Runtime Parameters . . . . . . . . . . . . . . . . . . . . . . . . 7-15
Creating Input and Output Ports . . . . . . . . . . . . . . . . . . . . 7-16
Creating Input Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-16
Creating Output Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-20
Scalar Expansion of Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . 7-21
Masked Multiport S-Functions . . . . . . . . . . . . . . . . . . . . . . . 7-23
Custom Data Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-24
Sample Times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-26
About Sample Times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-26
Block-Based Sample Times . . . . . . . . . . . . . . . . . . . . . . . . . . 7-27
x Contents
Specifying Port-Based Sample Times . . . . . . . . . . . . . . . . . 7-31
Hybrid Block-Based and Port-Based Sample Times . . . . . . 7-36
Multirate S-Function Blocks . . . . . . . . . . . . . . . . . . . . . . . . 7-37
Synchronizing Multirate S-Function Blocks . . . . . . . . . . . . 7-39
Specifying Model Reference Sample Time Inheritance . . . . 7-40
Work Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-42
About Work Vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-42
Work Vectors and Zero Crossings . . . . . . . . . . . . . . . . . . . . . 7-44
Example Involving a Pointer Work Vector . . . . . . . . . . . . . . 7-47
Memory Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-49
Function-Call Subsystems . . . . . . . . . . . . . . . . . . . . . . . . . . 7-50
Sim Viewing Devices in External Mode . . . . . . . . . . . . . . 7-55
Processing Frame-Based Signals . . . . . . . . . . . . . . . . . . . . 7-56
Handling Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-59
About Handling Errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-59
Exception Free Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-60
ssSetErrorStatus Termination Criteria . . . . . . . . . . . . . . . . 7-61
Checking Array Bounds . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-62
S-Function Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-63
About S-Function Examples . . . . . . . . . . . . . . . . . . . . . . . . . 7-63
Continuous States . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-63
Discrete States . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-70
Continuous and Discrete States . . . . . . . . . . . . . . . . . . . . . . 7-77
Variable Sample Time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-84
Array Inputs and Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . 7-90
Zero-Crossing Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-102
Discontinuities in Continuous States . . . . . . . . . . . . . . . . . 7-119
xi
S-Function Callback Methods Alphabetical
List
8
SimStruct Functions By Category
9
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
About SimStruct Functions . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
Language Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
The SimStruct . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-2
SimStruct Macros and Functions Listed by Usage . . . . 9-3
Input and Output Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-6
Run-Time Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-12
State and Work Vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-17
S-Function Options Alphabetical List
10
Examples
A
S-Function Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-2
S-Function Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-2
S-Function Builder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-2
Writing S-Functions in C . . . . . . . . . . . . . . . . . . . . . . . . . . . A-2
xii Contents
Creating C++ S-Functions . . . . . . . . . . . . . . . . . . . . . . . . . . A-2
Creating Ada S-Functions . . . . . . . . . . . . . . . . . . . . . . . . . . A-3
Creating Fortran S-Functions . . . . . . . . . . . . . . . . . . . . . . . A-3
Index
xiii
xiv Contents
1
Overview of S-Functions
What Is an S-Function? (p. 1-2) Brief overview of S-functions.
Using S-Functions in Models (p. 1-3) How to insert S-functions as blocks
in a model and pass parameters to
them.
How S-Functions Work (p. 1-7) How Simulink invokes S-functions
when simulating a model that
includes them.
Implementing S-Functions (p. 1-11) How to write S-functions.
S-Function Concepts (p. 1-14) Key concepts needed to write certain
types of S-functions.
S-Function Examples (p. 1-20) Examples that illustrate the creation
of various types of S-functions and
S-function features.
1 Overview of S-Functions
What Is an S-Function?
S-functions (system-functions) provide a powerful mechanism for extending
the capabilities of Simulink
. An S-function is a computer language
description of a Simulink block. S-functions can be written in MATLAB
, C,
C++, Ada, or Fortran. C, C++, Ada, and Fortran S-functions are compiled as
MEX-files using the mex utility (see Building MEX-Files in the External
Interfaces Users Guide). As with other MEX-files, they are dynamically
linked into MATLAB when needed.
S-functions use a special calling syntax that enables you to interact with
Simulink equation solvers. This interaction is very similar to the interaction
that takes place between the solvers and built-in Simulink blocks. The form
of an S-function is very general and can accommodate continuous, discrete,
and hybrid systems.
S-functions allow you to add your own blocks to Simulink models. You can
create your blocks in MATLAB, C, C++, Fortran, or Ada. By following a set of
simple rules, you can implement your algorithms in an S-function. After you
write your S-function and place its name in an S-Function block (available
in the User-Defined Functions block library), you can customize the user
interface by using masking.
You can use S-functions with Real-Time Workshop
. You can also customize
the code generated by Real-Time Workshop for S-functions by writing a
Target Language Compiler (TLC) file. See Writing S-Functions for Real-Time
Workshop in the Real-Time Workshop Users Guide for more information.
1-2
Using S-Functions in Models
Using S-Functions in Models
In this section...
Overview on page 1-3
Passing Parameters to S-Functions on page 1-5
When to Use an S-Function on page 1-6
Overview
To incorporate an S-function into a Simulink model, drag an S-Function block
from the Simulink User-Defined Functions block library into the model.
Then specify the name of the S-function in the S-function name field of the
S-Function blocks dialog box, as illustrated in the following figure.
1-3
1 Overview of S-Functions
SFunction
timestwo
Display
2
Constant
1
/*
* File : timestwo.c
* Abstract:
* An example C-file S-function for
* multiplying an input by 2:
* y = 2*u
*/
In this example, the model contains an instance of an S-Function block that
references a C MEX-file having the root name timestwo.
Note If the MATLAB path includes a C MEX-file and an M-file having the
same root name referenced by an S-function block, the S-function block uses
the C MEX-file.
1-4
Using S-Functions in Models
Passing Parameters to S-Functions
The S-function blocks S-function parameters field allows you to specify
parameter values to be passed to the corresponding S-function. To use this
field, you must know the parameters the S-function requires and the order in
which the function requires them. (If you do not know, consult the S-functions
author, documentation, or source code.) Enter the parameters, separated by a
comma, in the order required by the S-function. The parameter values can be
constants, names of variables defined in the MATLAB or model workspace, or
MATLAB expressions.
The following example illustrates usage of the S-function parameters field
to enter user-defined parameters.
The model in this example incorporates limintm, a sample S-function
that comes with Simulink. The functions source code resides in
toolbox/simulink/blocks. The limintm function accepts three parameters:
a lower bound, an upper bound, and an initial condition. It outputs the time
1-5
1 Overview of S-Functions
integral of the input signal if the time integral is between the lower and upper
bounds, the lower bound if the time integral is less than the lower bound, and
the upper bound if the time integral is greater than the upper bound. The
dialog box in the example specifies a lower and upper bound and an initial
condition of 2, 3, and 2.5, respectively. The scope shows the resulting output
when the input is a sine wave of amplitude 1.
See Processing S-Function Parameters on page 2-13 and Handling Errors
on page 7-59 for information on how to access user-specified parameters in
an S-function.
You can use the Simulink masking facility to create custom dialog boxes and
icons for your S-function blocks. Masked dialog boxes can make it easier to
specify additional parameters for S-functions. For discussions of additional
parameters and masking, see Creating Block Masks in the Using Simulink
documentation.
When to Use an S-Function
The most common use of S-functions is to create custom Simulink blocks. You
can use S-functions for a variety of applications, including
Adding new general purpose blocks to Simulink
Adding blocks that represent hardware device drivers
Incorporating existing C code into a simulation
Describing a system as a set of mathematical equations
Using graphical animations (see the inverted pendulum demo, penddemo)
An advantage of using S-functions is that you can build a general-purpose
block that you can use many times in a model, varying parameters with each
instance of the block.
1-6
How S-Functions Work
How S-Functions Work
In this section...
Introduction on page 1-7
Mathematics of Simulink Blocks on page 1-7
Simulation Stages on page 1-8
S-Function Callback Methods on page 1-9
Introduction
To create S-functions, you need to know how S-functions work. Understanding
how S-functions work, in turn, requires understanding how Simulink
simulates a model, and this, in turn requires an understanding of the
mathematics of blocks. This section begins by explaining the mathematical
relationship between a blocks inputs, states, and outputs.
Mathematics of Simulink Blocks
A Simulink block consists of a set of inputs, a set of states, and a set of
outputs, where the outputs are a function of the simulation time, the inputs,
and the blocks states.
The following equations express the mathematical relationships between the
inputs, outputs, states, and simulation time.
y f t x u
x f t x u
c d
=
=
0
( , , )
( , , )
(Outputs)
(Derivatives)
(Update)
where
x f t x x u
d u c d
k k +
=
1
( , , , )
x x x
c d
=
[ ]
;
1-7
1 Overview of S-Functions
Simulation Stages
Execution of a Simulink model proceeds in stages. First comes the
initialization phase. In this phase, Simulink incorporates library blocks
into the model, propagates widths, data types, and sample times, evaluates
block parameters, determines block execution order, and allocates memory.
Then Simulink enters a simulation loop, where each pass through the
loop is referred to as a simulation step. During each simulation step,
Simulink executes each of the models blocks in the order determined during
initialization. For each block, Simulink invokes functions that compute the
blocks states, derivatives, and outputs for the current sample time. This
continues until the simulation is complete.
The following figure illustrates the stages of a simulation.
1-8
How S-Functions Work
How Simulink Performs Simulation
S-Function Callback Methods
An S-function comprises a set of S-function callback methods that perform
tasks required at each simulation stage. During simulation of a model, at each
simulation stage, Simulink calls the appropriate methods for each S-Function
block in the model. Tasks performed by S-function methods include
1-9
1 Overview of S-Functions
Initialization Prior to the first simulation loop, Simulink initializes the
S-function. During this stage, Simulink
- Initializes the SimStruct, a simulation structure that contains
information about the S-function
- Sets the number and dimensions of input and output ports
- Sets the block sample times
- Allocates storage areas and the sizes array
Calculation of next sample hit If youve created a variable sample time
block, this stage calculates the time of the next sample hit; that is, it
calculates the next step size.
Calculation of outputs in the major time step After this call is complete,
all the output ports of the blocks are valid for the current time step.
Update of discrete states in the major time step In this call, all blocks
should perform once-per-time-step activities such as updating discrete
states for next time around the simulation loop.
Integration This applies to models with continuous states and/or
nonsampled zero crossings. If your S-function has continuous states,
Simulink calls the output and derivative portions of your S-function at
minor time steps. This is so Simulink can compute the states for your
S-function. If your S-function (C MEX only) has nonsampled zero crossings,
Simulink calls the output and zero-crossings portions of your S-function at
minor time steps so that it can locate the zero crossings.
Note See How Simulink Works in the Using Simulink documentation
for an explanation of major and minor time steps.
1-10
Implementing S-Functions
Implementing S-Functions
In this section...
M-File S-Functions on page 1-11
MEX-File S-Functions on page 1-12
M-File S-Functions
An M-file S-function consists of a MATLAB function of the following form:
[sys,x0,str,ts]=f(t,x,u,flag,p1,p2,...)
where f is the S-functions name, t is the current time, x is the state vector
of the corresponding S-function block, u is the blocks inputs, flag indicates
a task to be performed, and p1, p2, ... are the blocks parameters. During
simulation of a model, Simulink repeatedly invokes f, using flag to indicate
the task to be performed for a particular invocation. Each time the S-function
performs the task, it returns the result in a structure having the format
shown in the syntax example.
A template implementation of an M-file S-function, sfuntmpl.m, resides in
matlabroot/toolbox/simulink/blocks. The template consists of a top-level
function and a set of skeleton subfunctions, each of which corresponds to
a particular value of flag. The top-level function invokes the subfunction
indicated by flag. The subfunctions, called S-function callback methods,
perform the tasks required of the S-function during simulation. The following
table lists the contents of an M-file S-function that follows this standard
format.
Simulation Stage S-Function Routine Flag
Initialization mdlInitializeSizes flag = 0
Calculation of next
sample hit (variable
sample time block only)
mdlGetTimeOfNextVarHit flag = 4
Calculation of outputs mdlOutputs flag = 3
1-11
1 Overview of S-Functions
Simulation Stage S-Function Routine Flag
Update of discrete
states
mdlUpdate flag = 2
Calculation of
derivatives
mdlDerivatives flag = 1
End of simulation tasks mdlTerminate flag = 9
We recommend that you follow the structure and naming conventions of the
template when creating M-file S-functions. This makes it easier for others to
understand and maintain M-file S-functions that you create. See Chapter 2,
Writing S-Functions in M for information on creating M-file S-functions.
MEX-File S-Functions
Like an M-file S-function, a MEX-file function consists of a set of callback
routines that Simulink invokes to perform various block-related tasks during
a simulation. Significant differences exist, however. For one, MEX-file
functions are implemented in a different programming language: C, C++,
Ada, or Fortran. Also, Simulink invokes MEX S-function routines directly
instead of via a flag value as with M-file S-functions. Because Simulink
invokes the functions directly, MEX-file functions must follow standard
naming conventions specified by Simulink.
Other key differences exist. For one, the set of callback functions that
MEX functions can implement is much larger than can be implemented by
M-file functions. A MEX function also has direct access to the internal data
structure, called the SimStruct, that Simulink uses to maintain information
about the S-function. MEX-file functions can also use the MATLAB MEX-file
API to access the MATLAB workspace directly.
A C MEX-file S-function template, called sfuntmpl_basic.c, resides in
the matlabroot/simulink/src directory. The template contains skeleton
implementations of all the required and optional callback routines that a C
MEX-file S-function can implement. For a more amply commented version of
the template, see sfuntmpl_doc.c in the same directory.
1-12
Implementing S-Functions
MEX-File Versus M-File S-Functions
M-file and MEX-file S-functions each have advantages. The advantage of
M-file S-functions is speed of development. Developing M-file S-functions
avoids the time-consuming compile-link-execute cycle required by
development in a compiled language. M-file S-functions also have easier
access to MATLAB and toolbox functions.
The primary advantage of MEX-file functions is versatility. The larger
number of callbacks and access to the SimStruct enable MEX-file functions
to implement functionality not accessible to M-file S-functions. Such
functionality includes the ability to handle data types other than double,
complex inputs, matrix inputs, and so on.
1-13
1 Overview of S-Functions
S-Function Concepts
In this section...
Direct Feedthrough on page 1-14
Dynamically Sized Arrays on page 1-15
Setting Sample Times and Offsets on page 1-16
Direct Feedthrough
Direct feedthrough means that the output (or the variable sample time
for variable sample time blocks) is controlled directly by the value of an
input port. A good rule of thumb is that an S-function input port has direct
feedthrough if
The output function (mdlOutputs or flag==3) is a function of the input u.
That is, there is direct feedthrough if the input u is accessed in mdlOutputs.
Outputs can also include graphical outputs, as in the case of an XY Graph
scope.
The time of next hit function (mdlGetTimeOfNextVarHit or flag==4) of a
variable sample time S-function accesses the input u.
An example of a system that requires its inputs (i.e., has direct feedthrough) is
the operation , where u is the input, k is the gain, and y is the output.
An example of a system that does not require its inputs (i.e., does not have
direct feedthrough) is this simple integration algorithm
Outputs:
Derivative:
where x is the state, is the state derivative with respect to time, u is
the input, and y is the output. Note that is the variable that Simulink
integrates. It is very important to set the direct feedthrough flag correctly
because it affects the execution order of the blocks in your model and is used
to detect algebraic loops.
1-14
S-Function Concepts
Dynamically Sized Arrays
S-functions can be written to support arbitrary input dimensions. In this case,
the actual input dimensions are determined dynamically when a simulation
is started by evaluating the dimensions of the input vector driving the
S-function. The input dimensions can also be used to determine the number of
continuous states, the number of discrete states, and the number of outputs.
M-file S-functions can have only one input port and that input port can
accept only one-dimensional (vector) signals. However, the signals can be of
varying widths. Within an M-file S-function, to indicate that the input width
is dynamically sized, specify a value of -1 for the appropriate fields in the
sizes structure, which is returned during the mdlInitializeSizes call.
You can determine the actual input width when your S-function is called by
using length(u). If you specify a width of 0, the input port is removed from
the S-function block.
A C S-function can have multiple I/O ports and the ports can have different
dimensions. The number of dimensions and the size of each dimension can
be determined dynamically.
For example, the following illustration shows two instances of the same
S-Function block in a model.
The upper S-Function block is driven by a block with a three-element output
vector. The lower S-Function block is driven by a block with a scalar output.
By specifying that the S-Function block has dynamically sized inputs, the
same S-function can accommodate both situations. Simulink automatically
calls the block with the appropriately sized input vector. Similarly, if other
block characteristics, such as the number of outputs or the number of discrete
or continuous states, are specified as dynamically sized, Simulink defines
these vectors to be the same length as the input vector.
1-15
1 Overview of S-Functions
C S-functions give you more flexibility in specifying the widths of input and
output ports. See Creating Input and Output Ports on page 7-16.
Setting Sample Times and Offsets
Both M-file and C MEX S-functions allow a high degree of flexibility in
specifying when an S-function executes. Simulink provides the following
options for sample times:
Continuous sample time For S-functions that have continuous states
and/or nonsampled zero crossings (see How Simulink Works in Using
Simulink documentation for explanation of zero crossings). For this type of
S-function, the output changes in minor time steps.
Continuous but fixed in minor time step sample time For S-functions
that need to execute at every major simulation step, but do not change
value during minor time steps.
Discrete sample time If your S-Function blocks behavior is a function
of discrete time intervals, you can define a sample time to control when
Simulink calls the block. You can also define an offset that delays each
sample time hit. The value of the offset cannot exceed the corresponding
sample time.
A sample time hit occurs at time values determined by the formula
TimeHit = (n * period) + offset
where n, an integer, is the current simulation step. The first value of n is
always zero.
If you define a discrete sample time, Simulink calls the S-function
mdlOutput and mdlUpdate routines at each sample time hit (as defined in
the above equation).
Variable sample time A discrete sample time where the intervals between
sample hits can vary. At the start of each simulation step, S-functions with
variable sample times are queried for the time of the next hit.
Inherited sample time Sometimes an S-Function block has no inherent
sample time characteristics (that is, it is either continuous or discrete,
depending on the sample time of some other block in the system). You can
1-16
S-Function Concepts
specify that the blocks sample time is inherited. A simple example of this
is a Gain block that inherits its sample time from the block driving it.
A block can inherit its sample time from
- The driving block
- The destination block
- The fastest sample time in the system
To set a blocks sample time as inherited, use -1 in M-file S-functions and
INHERITED_SAMPLE_TIME in C S-functions as the sample time. For more
information on the propagation of sample times, see Displaying Sample
Time Colors in Using Simulink.
S-functions can be either single or multirate; a multirate S-function has
multiple sample times.
Sample times are specified in pairs in this format: [sample_time,
offset_time]. The valid sample time pairs are
[CONTINUOUS_SAMPLE_TIME, 0.0]
[CONTINUOUS_SAMPLE_TIME, FIXED_IN_MINOR_STEP_OFFSET]
[discrete_sample_time_period, offset]
[VARIABLE_SAMPLE_TIME, 0.0]
where
CONTINUOUS_SAMPLE_TIME = 0.0
FIXED_IN_MINOR_STEP_OFFSET = 1.0
VARIABLE_SAMPLE_TIME = -2.0
and the italics indicate that a real value is required.
Alternatively, you can specify that the sample time is inherited from the
driving block. In this case the S-function can have only one sample time pair
[INHERITED_SAMPLE_TIME, 0.0]
or
[INHERITED_SAMPLE_TIME, FIXED_IN_MINOR_STEP_OFFSET]
1-17
1 Overview of S-Functions
where
INHERITED_SAMPLE_TIME = -1.0
The following guidelines might help you specify sample times:
A continuous S-function that changes during minor integration steps
should register the [CONTINUOUS_SAMPLE_TIME, 0.0] sample time.
A continuous S-function that does not change during minor
integration steps should register the [CONTINUOUS_SAMPLE_TIME,
FIXED_IN_MINOR_STEP_OFFSET] sample time.
A discrete S-function that changes at a specified rate should register the
discrete sample time pair, [discrete_sample_time_period, offset],
where
discrete_sample_period > 0.0
and
0.0 offset < discrete_sample_period
A discrete S-function that changes at a variable rate should register the
variable step discrete sample time.
[VARIABLE_SAMPLE_TIME, 0.0]
The mdlGetTimeOfNextVarHit routine is called to get the time of the next
sample hit for the variable step discrete task.
If your S-function has no intrinsic sample time, you must indicate that your
sample time is inherited. There are two cases:
An S-function that changes as its input changes, even during minor
integration steps, should register the [INHERITED_SAMPLE_TIME, 0.0]
sample time.
An S-function that changes as its input changes, but doesnt change
during minor integration steps (that is, remains fixed during
1-18
S-Function Concepts
minor time steps), should register the [INHERITED_SAMPLE_TIME,
FIXED_IN_MINOR_STEP_OFFSET] sample time.
The Scope block is a good example of this type of block. This block should
run at the rate of its driving block, either continuous or discrete, but
should never run in minor steps. If it did, the scope display would show
the intermediate computations of the solver rather than the final result at
each time point.
1-19
1 Overview of S-Functions
S-Function Examples
In this section...
Overview of Examples on page 1-20
Level-2 M-File S-Function Examples on page 1-22
Level-1 M-File S-Function Examples on page 1-22
C S-Function Examples on page 1-25
Fortran S-Function Examples on page 1-29
C++ S-Function Examples on page 1-30
Ada S-Function Examples on page 1-30
Overview of Examples
To run an example:
1 Enter sfundemos at the MATLAB command line.
MATLAB displays the S-function demo library.
Each block represents a category of S-function examples.
2 Click a category to display the examples that it includes.
1-20
S-Function Examples
3 Click a block to open and run the example that it represents.
It might be helpful to examine some sample S-functions as you read the next
chapters. Code for the examples is stored in these subdirectories under the
MATLAB root directory:
M-files toolbox/simulink/blocks
C, C++, and Fortran simulink/src
Ada simulink/ada/examples
1-21
1 Overview of S-Functions
Level-2 M-File S-Function Examples
The simulink/blocks directory contains many Level-2 M-file S-functions.
Consider starting off by looking at these files.
Filename Description
msfcn_dsc.m Inherited sample time example.
msfcn_limintm.m Implement a continuous limited
integrator where the output is
bounded by lower and upper bounds
and includes initial conditions.
msfcn_times_two.m Basic Level-2 M-file S-function that
doubles its input.
msfcn_unit_delay.m Implement a unit delay.
msfcn_varpulse.m Implement a variable pulse width
generator by calling set_param from
within a Level-2 S-function.
msfcn_vs.m Implement a variable sample time
block in which the first input is
delayed by an amount of time
determined by the second input.
Level-1 M-File S-Function Examples
The simulink/blocks directory also contains many Level-1 M-file
S-functions, provided as reference for legacy models.
Filename Description
csfunc.m Define a continuous system in
state-space format.
dsfunc.m Define a discrete system in
state-space format.
1-22
S-Function Examples
Filename Description
vsfunc.m Illustrates how to create a variable
sample time block. This block
implements a variable step delay in
which the first input is delayed by
an amount of time determined by
the second input.
mixedm.m Implement a hybrid system
consisting of a continuous integrator
in series with a unit delay.
vdpm.m Implement the Van der Pol equation
(similar to the demo model, vdp).
simom.m Example state-space M-file
S-function with internal A, B, C,
and D matrices. This S-function
implements
dx/dt = Ax + By
y = Cx + Du
where x is the state vector, u is the
input vector, and y is the output
vector. The A, B, C, and D matrices
are embedded in the M-file.
simom2.m Example state-space M-file
S-function with external A, B, C,
and D matrices. The state-space
structure is the same as in simom.m,
but the A, B, C, and D matrices are
provided externally as parameters
to this file.
limintm.m Implement a continuous limited
integrator where the output is
bounded by lower and upper bounds
and includes initial conditions.
1-23
1 Overview of S-Functions
Filename Description
sfun_varargm.m Example M-file S-function showing
how to use the MATLAB vararg
facility.
vlimintm.m Example of a continuous limited
integrator S-function. This
illustrates how to use the size entry
of -1 to build an S-function that can
accommodate a dynamic input/state
width.
vdlmintm.m Example of a discrete limited
integrator S-function. This example
is identical to vlimint.m, except that
the limited integrator is discrete.
1-24
S-Function Examples
C S-Function Examples
The simulink/src directory also contains examples of C MEX S-functions,
many of which have an M-file S-function counterpart. These C MEX
S-functions are listed in this table.
Filename Description
barplot.c Access Simulink signals without
using the standard block inputs.
csfunc.c Example C MEX S-function for
defining a continuous system.
dlimintc.c Implement a discrete-time limited
integrator.
dsfunc.c Example C MEX S-function for
defining a discrete system.
fcncallgen.c Execute function-call subsystems n
times at the designated rate (sample
time).
limintc.c Implement a limited integrator.
mixedm.c Implement a hybrid dynamic system
consisting of a continuous integrator
(1/s) in series with a unit delay (1/z).
mixedmex.c Implement a hybrid dynamic system
with a single output and two inputs.
quantize.c Example MEX-file for a vectorized
quantizer block. Quantizes the
input into steps as specified by the
quantization interval parameter, q.
sdotproduct Compute dot product
(multiply-accumulate) of two
real or complex vectors.
sftable2.c Two-dimensional table lookup in
S-function form.
1-25
1 Overview of S-Functions
Filename Description
sfun_atol.c Set different absolute tolerances for
each continuous state.
sfun_cplx.c Complex signal add with one input
port and one parameter.
sfun_directlook.c Direct 1-D lookup.
sfun_dtype_io.c Example of the use of Simulink data
types for inputs and outputs.
sfun_dtype_param.c Example of the use of Simulink data
types for parameters.
sfun_dynsize.c Simple example of how to size
outputs of an S-function dynamically.
sfun_errhdl.c Simple example of how to
check parameters using the
mdlCheckParams S-function routine.
sfun_fcncall.c Example of an S-function that is
configured to execute function-call
subsystems on the first and second
output elements.
sfun_frmad.c Frame-based A/D converter.
sfun_frmda.c Frame-based D/A converter.
sfun_frmdft.c Multichannel frame-based
Discrete-Fourier transformation
(and its inverse).
sfun_frmunbuff.c Frame-based unbuffer block.
sfun_multiport.c S-function that has multiple input
and output ports.
sfun_manswitch.c Manual switch.
sfun_matadd.c Matrix add with one input port, one
output port, and one parameter.
sfun_multirate.c Demonstrate how to specify
port-based sample times.
1-26
S-Function Examples
Filename Description
sfun_psbbreaker.c Implement the logic for the Breaker
block in the SimPowerSystems
Blockset.
sfun_psbcontc.c Continuous implementation of
state-space system.
sfun_psbdiscc.c Discrete implementation of
state-space system.
sfun_runtime1.c Run-time parameter example.
sfun_runtime2.c Run-time parameter example.
sfun_zc.c Demonstrate use of nonsampled zero
crossings to implement abs(u). This
S-function is designed to be used
with a variable-step solver.
sfun_zc_sat.c Saturation example that uses zero
crossings.
sfunmem.c A one-integration-step delay and
hold memory function.
simomex.c Implements a single-input,
two-output state-space dynamic
system described by these
state-space equations
dx/dt = Ax + Bu
y = Cx + Du
where x is the state vector, u is
vector of inputs, and y is the vector
of outputs.
1-27
1 Overview of S-Functions
Filename Description
stspace.c Implement a set of state-space
equations. You can turn this
into a new block by using the
S-Function block and mask facility.
This example MEX-file performs
the same function as the built-in
State-Space block. This is an
example of a MEX-file where the
number of inputs, outputs, and states
is dependent on the parameters
passed in from the workspace. Use
this as a template for other MEX-file
systems.
stvctf.c Implement a continuous-time
transfer function whose transfer
function polynomials are passed in
via the input vector. This is useful
for continuous time adaptive control
applications.
stvdtf.c Implement a discrete-time transfer
function whose transfer function
polynomials are passed in via
the input vector. This is useful
for discrete-time adaptive control
applications.
stvmgain.c Time-varying matrix gain.
table3.c 3-D lookup table.
timestwo.c Basic C MEX S-function that doubles
its input.
vdlmintc.c Implement a discrete-time vectorized
limited integrator.
vdpmex.c Implement the Van der Pol equation.
1-28
S-Function Examples
Filename Description
vlimintc.c Implement a vectorized limited
integrator.
vsfunc.c Illustrate how to create a variable
sample time block in Simulink. This
block implements a variable-step
delay in which the first input is
delayed by an amount of time
determined by the second input.
Fortran S-Function Examples
The following table lists sample Fortran S-functions available in the
simulink/src directory.
Filename Description
sfun_timestwo_for.F Sample Level 1 Fortran
representation of a C timestwo
S-function.
sfun_atmos.c
sfun_atmos_sub.F
Calculation of the 1976 standard
atmosphere to 86 km using a Fortran
subroutine.
simomexf.F Sample Level 1 Fortran
representation of the C simomex
S-function.
vdpmexf.F Sample Level 1 Fortran
representation of the C vdpmex
S-function.
1-29
1 Overview of S-Functions
C++ S-Function Examples
The following table lists sample C++ S-functions.
Filename Description
sfun_counter_cpp.cpp Store a C++ object in the pointers
vector PWork.
Ada S-Function Examples
The simulink/ada/examples directory contains the following subdirectories
with examples of S-functions implemented in Ada.
Subdirectory Name Description
matrix_gain Implement a Matrix Gain block.
multi_port Multiport block.
simple_lookup Lookup table. Illustrates use of
a wrapper S-function that wraps
stand-alone Ada code (i.e., Ada
packages and procedures) both for
use with Simulink as an S-function
and directly with Ada code generated
using the Real-Time Workshop Ada
Coder.
times_two Output twice its input.
1-30
2
Writing S-Functions in M
Introduction (p. 2-2) Introduction to writing S-functions
in the MATLAB M language.
Writing Level-2 M-File S-Functions
(p. 2-3)
Explains how to create M-file
S-functions based on the current
Level-2 M-file S-function application
programming interface (API).
Maintaining Level-1 M-File
S-Functions (p. 2-9)
Provides information on maintaining
Level-1 M-file S-functions developed
for earlier versions of Simulink.
2 Writing S-Functions in M
Introduction
Simulink provides an application programming interface (API) that lets you
create custom blocks whose properties and behavior are defined by M-file
programs called M-file S-functions. The Level-2 M-file S-function API allows
you to create blocks that have all of the features and capabilities of Simulink
built-in blocks, including multiple input and output ports, the ability to accept
vector or matrix signals of any data type supported by Simulink, real or
complex signals, signal frames, and the ability to operate at multiple sample
rates. For information on how to use the API to create custom blocks, see
Writing Level-2 M-File S-Functions on page 2-3.
Note This version of Simulink also supports a predecessor API, called Level
1, for writing M-file S-functions. This is done to ensure that Simulink can
simulate models that use M-file S-function blocks developed for use with
earlier Simulink releases (see Maintaining Level-1 M-File S-Functions
on page 2-9). You should not use the Level-1 API to develop new M-file
S-functions. Instead, you should use the Level-2 API.
Simulink allows you to generate code for M-file S-functions if they are inlined.
See Inlining S-Functions in the Target Language Compiler documentation
for more information.
2-2
Writing Level-2 M-File S-Functions
Writing Level-2 M-File S-Functions
In this section...
About Level-2 M-File S-Functions on page 2-3
Level-2 M-File S-Function API on page 2-4
M-File S-Function Demos on page 2-4
S-Function Template on page 2-4
Instantiating a Level-2 M-File S-Function on page 2-4
Generating Code from a Level-2 M-File S-Function on page 2-5
Callback Methods on page 2-5
Setup Method on page 2-6
Run-time Object on page 2-8
About Level-2 M-File S-Functions
The Level-2 M-file S-function application programming interface (API) allows
you to use the MATLAB M language to create full-fledged custom blocks
having multiple inputs and outputs and capable of handling any type of signal
produced by a Simulink model, including matrix and frame signals of any
data type. The Level-2 M-File S-Function API corresponds closely to the API
for creating C MEX-file S-functions. Much of the documentation for creating C
MEX-file S-functions (see Chapter 3, Writing S-Functions in C and Chapter
7, Implementing Block Features) applies also to Level-2 M-file S-functions.
To avoid duplication, this section focuses on providing information that is
specific to writing Level-2 M-file S-functions.
A Level-2 M-file S-function is an M-file that defines the properties and
behavior of an instance of a Level-2 M-File S-Function block that references
the M-file in a Simulink model. The M-file itself comprises a set of callback
methods (see Callback Methods on page 2-5) that Simulink invokes when
updating or simulating the model. The callback methods perform the actual
work of initializing and computing the outputs of the block defined by the
S-function.
2-3
2 Writing S-Functions in M
To facilitate these tasks, Simulink passes a run-time object to the callback
methods as an argument. The run-time object effectively serves as an M proxy
for the S-function block, allowing the callback method to set and access the
blocks properties during simulation or model updating (see Run-time Object
on page 2-8 for more information).
Level-2 M-File S-Function API
The Level-2 M-File S-function API defines the signatures and general purpose
of the callback methods that constitute a Level-2 M-file S-function. The
S-function itself provides the implementations of these callback methods.
The implementations in turn determine the blocks attributes (e.g., ports,
parameters, and states) and behavior (e.g., the blocks outputs as a function
of time and the blocks inputs, states, and parameters). By creating an
S-function with an appropriate set of callback implementations, you can
define a block type that meets the specific requirements of your application.
M-File S-Function Demos
Simulink provides a set of self-documenting demo models that illustrate
creation and usage of Level-2 M-file S-functions. Enter sfundemos at the
MATLAB command line to view the demos.
S-Function Template
To give you a head start on creating Level-2 M-file S-functions, Simulink
provides an annotated M-file template containing skeleton implementation
of the callbacks defined by the Level-2 M-File S-function API. The template
resides at
matlabroot/toolbox/simulink/blocks/msfuntmpl.m
To create an M-file S-function, make a copy of the template and edit the copy
as necessary to reflect the desired behavior of the S-function you are creating.
The comments in the template explain how to do this.
Instantiating a Level-2 M-File S-Function
To create an instance of the S-function in a model, first create an instance
of the Level-2 M-File S-Function block in the model. Then open the blocks
2-4
Writing Level-2 M-File S-Functions
parameter dialog box and enter the name of the M-file that implements your
S-function in the dialog boxs M-file name field. If your function uses any
additional parameters, enter their values as a comma-separated list in the
dialog boxs Parameters field.
Generating Code from a Level-2 M-File S-Function
Generating code from a model containing a Level-2 M-file S-function requires
that you provide a corresponding TLC file. You do not need a TLC file to run a
model in accelerated mode as the Accelerator mode in Simulink runs Level-2
M-file S-functions in interpreted mode. See Inlining M-File S-Functions
in the Real-Time Workshop Users Guide for more information on writing
TLC-files for M-file S-functions.
Callback Methods
The Level-2 M-file S-function API specifies a set of callback methods that an
M-file S-function must implement (see Callback Methods That an S-Function
Must Implement on page 3-50) and others that it may choose to omit,
depending on the requirements of the block that the S-function defines. The
methods defined by the Level-2 M-file S-function API generally correspond to
that of similarly named methods defined by the C MEX-file S-function API. For
information on what each method does, see How Simulink Works in Using
Simulink and Chapter 8, S-Function Callback Methods Alphabetical List.
The following table lists the Level-2 M-file S-function callback methods and
their C MEX-file counterparts.
Level-2 M-File Method C MEX-File Method
setup method (see Setup Method
on page 2-6)
mdlInitializeSizes
CheckParameters mdlCheckParameters
Derivatives mdlDerivatives
Disable mdlDisable
Enable mdlEnable
InitializeCondition mdlInitializeConditions
2-5
2 Writing S-Functions in M
Level-2 M-File Method C MEX-File Method
Outputs mdlOutputs
PostPropagationSetup mdlSetWorkWidths
ProcessParameters mdlProcessParameters
Projection mdlProjection
SetInputPortComplexSignal mdlSetInputPortComplexSignal
SetInputPortDataType mdlSetInputPortDataType
SetInputPortDimensions mdlSetInputPortDimensionInfo
SetInputPortSampleTime mdlSetInputPortSampleTime
SetInputPortSamplingMode mdlSetInputPortFrameData
SetOutputPortComplexSignal mdlSetOutputPortComplexSignal
SetOutputPortDataType mdlSetOutputPortDataType
SetOutputPortDimensions mdlSetOutputPortDimensionInfo
SetOutputPortSampleTime mdlSetOutputPortSampleTime
SimStatusChange mdlSimStatusChange
Start mdlStart
Terminate mdlTerminate
Update mdlUpdate
WriteRTW mdlRTW
ZeroCrossings mdlZeroCrossings
Setup Method
The body of the setup method of a Level-2 M-file S-function initializes
instances of the corresponding Level-2 M-File S-Function block in a model.
In this respect, the main function is similar to the mdlInitializeSizes
callback method implemented by C MEX S-functions. Setup tasks that the
main function performs include:
Setting up the number of input and output ports of the block.
2-6
Writing Level-2 M-File S-Functions
Setting attributes such as dimensions, data types, complexity, and sample
times for these ports.
Setting up the number of parameters and checking for the validity of these
parameters.
Registering the various block methods using the handles for other
local functions in the M-file, using the RegBlockMethod method of the
S-function blocks run-time object passed to it. See the documentation for
Simulink.MSFcnRunTimeBlock for information on using this method.
The setup method in
matlabroot/toolbox/simulink/blocks/msfcn_unit_delay.m initializes an
S-function with one input port, one output port, and one dialog parameter. It
initializes the compiled properties of the input and output ports using the
run-time object methods SetPreCompInpPortInfoToDynamic and
SetPreCompOutPortInfoToDynamic as well as by directly setting certain
properties. Finally, the method registers four S-function methods.
function setup(block)
%% Register a single dialog parameter
block.NumDialogPrms = 1;
%% Register number of input and output ports
block.NumInputPorts = 1;
block.NumOutputPorts = 1;
%% Setup functional port properties to dynamically
%% inherited.
block.SetPreCompInpPortInfoToDynamic;
block.SetPreCompOutPortInfoToDynamic;
%% Hard-code certain port properties
block.InputPort(1).Dimensions = 1;
block.InputPort(1).DirectFeedthrough = false
block.OutputPort(1).Dimensions = 1;
%% Set block sample time to inherited
2-7
2 Writing S-Functions in M
block.SampleTimes = [0.1 0];
%% Register methods
block.RegBlockMethod('PostPropagationSetup',@DoPostPropSetup);
block.RegBlockMethod('InitializeConditions',@InitConditions);
block.RegBlockMethod('Outputs', @Output);
block.RegBlockMethod('Update', @Update);
Run-time Object
When Simulink invokes a Level-2 M-file S-function callback method, it passes
an instance of Simulink.MSFcnRunTimeBlock class to the method as an
argument. This instance, known as the S-function blocks run-time object,
serves the same purpose for Level-2 M-file S-function callback methods as the
SimStruct structure serves for C MEX-file S-function callback methods. It
enables the method to provide and obtain information about various elements
of the block: ports, parameters, states, and work vectors. The method does
this by getting or setting properties or invoking methods of the block run-time
object. See the documentation for Simulink.MSFcnRunTimeBlock class for
information on getting and setting the run-time objects properties and
invoking its methods.
Note Other M-file programs besides M-file S-functions can use run-time
objects to obtain information about an M-file S-function or other blocks in a
model that is simulating. See Accessing Block Data During Simulation in
Using Simulink for more information.
2-8
Maintaining Level-1 M-File S-Functions
Maintaining Level-1 M-File S-Functions
In this section...
About the Maintenance of Level-1 M-File S-Functions on page 2-9
S-Function Arguments on page 2-10
S-Function Outputs on page 2-11
Defining S-Function Block Characteristics on page 2-12
Processing S-Function Parameters on page 2-13
Converting Level-1 M-File S-functions to Level-2 on page 2-13
About the Maintenance of Level-1 M-File S-Functions
Note The information provided in this section is intended only for use in
maintaining existing M-file S-functions based on Level-1 API. You should use
the more capable Level-2 API to develop new M-file S-functions (see Writing
Level-2 M-File S-Functions on page 2-3). Level-1 M-file S-functions do not
support multidimensional signals.
A Level-1 M-file S-function consists of a MATLAB function of the following
form
[sys,x0,str,ts]=f(t,x,u,flag,p1,p2,...)
where f is the name of the S-function. During simulation of a model, Simulink
repeatedly invokes f, using the flag argument to indicate the task (or tasks)
to be performed for a particular invocation. Each time the S-function performs
the task and returns the results in an output vector.
A template implementation of an M-file S-function, sfuntmpl.m, resides in
matlabroot/toolbox/simulink/blocks. The template consists of a top-level
function and a set of skeleton subfunctions, called S-function callback
methods, each of which corresponds to a particular value of flag. The top-level
function invokes the subfunction indicated by flag. The subfunctions perform
the actual tasks required of the S-function during simulation.
2-9
2 Writing S-Functions in M
S-Function Arguments
Simulink passes the following arguments to an S-function:
t Current time
x State vector
u Input vector
flag Integer value that indicates the task to be performed by
the S-function
The following table describes the values that flag can assume and lists the
corresponding S-function method for each value.
Flag Argument
Flag S-Function Routine Description
0 setup, mdlInitializeSizes Defines basic S-Function
block characteristics,
including sample times,
initial conditions of
continuous and discrete
states, and the sizes array.
1 mdlDerivatives Calculates the derivatives
of the continuous state
variables.
2 mdlUpdate Updates discrete states,
sample times, and major
time step requirements.
3 mdlOutputs Calculates the outputs of
the S-function.
2-10
Maintaining Level-1 M-File S-Functions
Flag Argument (Continued)
Flag S-Function Routine Description
4 mdlGetTimeOfNextVarHit Calculates the time of the
next hit in absolute time.
This routine is used only
when you specify a variable
discrete-time sample time
in mdlInitializeSizes.
9 mdlTerminate Performs any necessary
end-of-simulation tasks.
S-Function Outputs
An M-file returns an output vector containing the following elements:
sys, a generic return argument. The values returned depend on the flag
value. For example, for flag = 3, sys contains the S-function outputs.
x0, the initial state values (an empty vector if there are no states in the
system). x0 is ignored, except when flag = 0.
str, reserved for future use. M-file S-functions must set this to the empty
matrix, [].
ts, a two-column matrix containing the sample times and offsets of the
block (see Specifying Sample Time in the Using Simulink for information
on how to specify a blocks sample time and offset).
For example, if you want your S-function to run at every time step
(continuous sample time), set ts to [0 0]. If you want your S-function
to run at the same rate as the block to which it is connected (inherited
sample time), set ts to [-1 0]. If you want it to run every 0.25 seconds
(discrete sample time) starting at 0.1 seconds after the simulation start
time, set ts to [0.25 0.1].
You can create S-functions that do multiple tasks, each at a different
sample rate (i.e., a multirate S-function). In this case, ts should specify
all the sample rates used by your S-function in ascending order by sample
time. For example, suppose your S-function performs one task every 0.25
second starting from the simulation start time and another task every 1
2-11
2 Writing S-Functions in M
second starting 0.1 second after the simulation start time. In this case,
your S-function should set ts equal to [.25 0; 1.0 .1]. This will cause
Simulink to execute the S-function at the following times: [0 0.1 0.25
0.5 0.75 1 1.1 ...]. Your S-function must decide at every sample time
which task to perform at that sample time.
You can also create an S-function that performs some tasks continuously
(i.e., at every time step) and others at discrete intervals.
Defining S-Function Block Characteristics
For Simulink to recognize an M-file S-function, you must provide it with
specific information about the S-function. This information includes the
number of inputs, outputs, states, and other block characteristics.
To give Simulink this information, call the simsizes function at the beginning
of mdlInitializeSizes.
sizes = simsizes;
This function returns an uninitialized sizes structure. You must load the
sizes structure with information about the S-function. The table below lists
the fields of the sizes structure and describes the information contained
in each field.
Fields in the sizes Structure
Field Name Description
sizes.NumContStates Number of continuous states
sizes.NumDiscStates Number of discrete states
sizes.NumOutputs Number of outputs
sizes.NumInputs Number of inputs
sizes.DirFeedthrough Flag for direct feedthrough
sizes.NumSampleTimes Number of sample times
After you initialize the sizes structure, call simsizes again:
sys = simsizes(sizes);
2-12
Maintaining Level-1 M-File S-Functions
This passes the information in the sizes structure to sys, a vector that holds
the information for use by Simulink.
Processing S-Function Parameters
When invoking an M-file S-function, Simulink always passes the standard
block parameters, t, x, u, and flag, to the S-function as function arguments.
Simulink can pass additional block-specific parameters specified by the user
to the S-function. The user specifies the parameters in the S-function
parameters field of the S-functions block parameter dialog (see Passing
Parameters to S-Functions on page 1-5). If the block dialog specifies
additional parameters, Simulink passes the parameters to the S-function
as additional function arguments. The additional arguments follow the
standard arguments in the S-function argument list in the order in which
the corresponding parameters appear in the block dialog. You can use this
block-specific S-function parameter capability to allow the same S-function
to implement various processing options. See the limintm.m example in the
toolbox/simulink/blocks directory for an example of an S-function that
uses block-specific parameters in this way.
Converting Level-1 M-File S-functions to Level-2
You can convert Level-1 M-file S-functions to Level-2 M-file S-functions
by mapping the code associated with each Level-1 S-function flag to the
appropriate Level-2 S-function method. See the Flag Arguments table for a
mapping of Level-1 flags to Level-2 methods. In addition
Store state information for Level-2 S-functions in Dwork vectors, initialized
in the PostPropagationSetup method.
Access Level-2 S-function dialog parameters using the DialogPrm run-time
object property, instead of passing them into the S-function calling syntax.
For S-functions with variable sample times, update the NextTimeHit
run-time object property in the Outputs method to set the next sample
time hit for the Level-2 S-function.
Compare the code in the Level-1 and Level-2 S-functions sfundsc2.m and
msfcn_unit_delay.m for an example.
2-13
2 Writing S-Functions in M
2-14
3
Writing S-Functions in C
Introduction (p. 3-3) Overview of writing a C S-function.
Building S-Functions Automatically
(p. 3-6)
How to use the S-Function Builder to
generate S-functions automatically
from specifications that you supply.
S-Function Builder Dialog Box
(p. 3-11)
Describes the S-Function Builder
dialog box
Example of a Basic C MEX
S-Function (p. 3-41)
Illustrates the code needed to create
a C S-function.
Templates for C S-Functions (p. 3-48) Describes code templates that you
can use as starting points for writing
your own C S-functions.
Integrating Existing C Functions
into Simulink Models with the
Legacy Code Tool (p. 3-53)
How to use the Legacy Code Tool to
generate S-functions automatically
from existing C code.
How Simulink Interacts with C
S-Functions (p. 3-74)
Describes how Simulink interacts
with a C S-function. This is
information that you need to know
in order to create and debug your
own C S-functions.
Writing Callback Methods (p. 3-82) How to write methods that Simulink
calls as it executes your S-function.
Using S-Functions in Normal Mode
Referenced Models (p. 3-83)
Describes requirements that must
be met by a C S-function that is used
in a referenced model that executes
in Normal mode
3 Writing S-Functions in C
Debugging C MEX S-Functions
(p. 3-85)
How to debug C MEX S-Functions
while Simulink executes your
S-function.
Converting Level 1 C MEX
S-Functions to Level 2 (p. 3-89)
How to convert S-functions written
for earlier releases of Simulink to
work with the current version.
3-2
Introduction
Introduction
In this section...
About Writing C S-Functions on page 3-3
Creating C MEX S-Functions on page 3-4
About Writing C S-Functions
A C MEX-file that defines an S-Function block must provide information
about the model to Simulink during the simulation. As the simulation
proceeds, Simulink, the ODE solver, and the C MEX-file interact to perform
specific tasks. These tasks include defining initial conditions and block
characteristics, and computing derivatives, discrete states, and outputs.
As with M-file S-functions, Simulink interacts with a C MEX-file S-function
by invoking callback methods that the S-function implements. Each method
performs a predefined task, such as computing block outputs, required to
simulate the block whose functionality the S-function defines. Simulink
defines in a general way the task of each callback. The S-function is free to
perform the task according to the functionality it implements. For example,
Simulink specifies that the S-functions mdlOutput method must compute that
blocks outputs at the current simulation time. It does not specify what those
outputs must be. This callback-based API allows you to create S-functions,
and hence custom blocks, of any desired functionality.
The set of callback methods, hence functionality, that C MEX-files can
implement is much larger than that available for M-file S-functions.
See Chapter 8, S-Function Callback Methods Alphabetical List for
descriptions of the callback methods that a C MEX-file S-function can
implement. Unlike M-file S-functions, C MEX-files can access and modify
the data structure that Simulink uses internally to store information about
the S-function. The ability to implement a broader set of callback methods
and to access internal data structures allows C MEX-files to implement a
wider set of block features, such as the ability to handle matrix signals and
multiple data types.
C MEX-file S-functions are required to implement only a small subset of the
callback methods that Simulink defines. If your block does not implement a
3-3
3 Writing S-Functions in C
particular feature, such as matrix signals, you are free to omit the callback
methods required to implement a feature. This allows you to create simple
blocks very quickly.
The general format of a C MEX S-function is shown below:
#define S_FUNCTION_NAME your_sfunction_name_here
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
static void mdlInitializeSizes(SimStruct *S)
{
}
<additional S-function routines/code>
static void mdlTerminate(SimStruct *S)
{
}
#ifdef MATLAB_MEX_FILE /* Is this file being compiled as a
MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration
function */
#endif
mdlInitializeSizes is the first routine Simulink calls when interacting with
the S-function. Simulink subsequently invokes other S-function methods (all
starting with mdl). At the end of a simulation, Simulink calls mdlTerminate.
Creating C MEX S-Functions
You can create C MEX S-functions using any of the following approaches:
Handcrafted S-function You can write a C MEX S-function from
scratch. Example of a Basic C MEX S-Function on page 3-41 provides a
step-by-step example of how to write a simple S-function from scratch.
See Templates for C S-Functions on page 3-48 for a complete skeleton
3-4
Introduction
implementation of a C MEX S-function that you can use as a starting point
for creating your own S-functions.
S-Function Builder This block builds a C MEX S-function from
specifications and code fragments that you supply using a graphical user
interface. This eliminates the need for you to write S-functions from
scratch. See Building S-Functions Automatically on page 3-6 for more
information about the S-Function Builder.
Legacy Code Tool This utility builds a C MEX S-function from existing
C code and specifications that you supply using MATLAB M-code. See
Integrating Existing C Functions into Simulink Models with the Legacy
Code Tool on page 3-53 for more information about integrating legacy C
code with Simulink.
Each of these approaches involves a tradeoff between the ease of writing an
S-function and the Simulink features supported by an S-function. Although
handcrafted S-functions support the widest range of Simulink features, they
can be difficult to write. The S-Function Builder block simplifies the task of
writing C MEX S-functions but supports fewer Simulink features. The Legacy
Code Tool provides the easiest approach to creating C MEX S-functions from
existing C code but supports the fewest Simulink features.
3-5
3 Writing S-Functions in C
Building S-Functions Automatically
In this section...
About Building S-Functions Automatically on page 3-6
Deploying the Generated S-Function on page 3-9
How the S-Function Builder Builds an S-Function on page 3-10
About Building S-Functions Automatically
The S-Function Builder is a Simulink block that builds an S-function from
specifications and C code that you supply. The S-Function Builder also serves
as a wrapper for the generated S-function in models that use the S-function.
This section explains how to use the S-Function Builder to build simple C
MEX S-functions.
Note For examples of using the S-Function Builder to build S-functions,
see the C-file S-functions section of the S-function demos provided with
Simulink. To display the demos, enter sfundemos at the MATLAB command
line (see S-Function Examples on page 1-20 for more information).
To build an S-function with the S-Function Builder:
1 Set the MATLAB current directory to the directory in which you want to
create the S-function.
Note This directory must be on the MATLAB path.
2 Create a new Simulink model.
3 Copy an instance of the S-Function Builder block from the Simulink
User-Defined Functions library into the new model.
3-6
Building S-Functions Automatically
4 Double-click the block to open the S-Function Builder dialog box (see
S-Function Builder Dialog Box on page 3-11).
3-7
3 Writing S-Functions in C
5 Use the specification and code entry panes on the S-Function Builder dialog
box to enter information and custom source code required to tailor the
generated S-function to your application (see S-Function Builder Dialog
Box on page 3-11).
6 If you have not already done so, configure the MATLAB mex command to
work on your system.
3-8
Building S-Functions Automatically
To configure the mex command, type mex -setup at the MATLAB command
line.
7 Click Build on the dialog box to start the build process.
Simulink builds a MEX-file that implements the specified S-function and
saves the file in the current directory (see How the S-Function Builder
Builds an S-Function on page 3-10).
8 Save the model containing the S-Function Builder block.
Deploying the Generated S-Function
To use the generated S-function in another model, first check to ensure that
the directory containing the generated S-function is on the MATLAB path.
Then copy the S-Function Builder block from the model used to create the
S-function into the target model and set its parameters, if necessary, to the
values required by the target model.
Alternatively, you can deploy the generated S-function without using the
S-Function Builder block or exposing the underlying C source file. To do this:
1 Open the Simulink model will include the S-function.
2 Copy an S-Function block from the User-Defined Functions Simulink
library into the model.
3 Double-click on the S-Function block.
4 In the dialog box that opens, enter the name of the executable file generated
by the S-Function Builder into the S-Function name edit field.
5 Enter any parameters needed by the S-function into the S-function
parameters edit field. Enter the parameters in the order they appear in
the S-Function Builder dialog box.
6 Click OK on the S-Function block dialog box.
You can use the generated executable file, for example, the .mexw32 file, in
any S-Function block in any model as long as the executable file is on the
MATLAB path.
3-9
3 Writing S-Functions in C
How the S-Function Builder Builds an S-Function
The S-Function Builder builds an S-function as follows. First, it generates
the following source files in the current directory:
sfun.c
where sfun is the name of the S-function that you specified in the
S-function name field of the S-Function Builders dialog box. This file
contains the C source code representation of the standard portions of the
generated S-function.
sfun_wrapper.c
This file contains the custom code that you entered in the S-Function
Builder dialog box.
sfun.tlc
This file permits Simulink to run the generated S-function in accelerated
mode and Real-Time Workshop to include this S-function in the code it
generates.
After generating the S-function source code, the S-Function Builder uses the
MATLAB mex command to build the MEX-file representation of the S-function
from the generated source code and any external custom source code and
libraries that you specified.
3-10
S-Function Builder Dialog Box
S-Function Builder Dialog Box
In this section...
About S-Function Builder on page 3-11
Parameters/S-Function Name Pane on page 3-13
Port/Parameter Pane on page 3-14
Initialization Pane on page 3-14
Data Properties Pane on page 3-16
Input Ports Pane on page 3-18
Output Ports Pane on page 3-19
Parameters Pane on page 3-21
Data Type Attributes Pane on page 3-22
Libraries Pane on page 3-23
Outputs Pane on page 3-25
Continuous Derivatives Pane on page 3-29
Discrete Update Pane on page 3-31
Build Info Pane on page 3-33
Example: Modeling a Two-Input/Two-Output System on page 3-35
About S-Function Builder
The S-Function Builder dialog box enables you to specify the attributes of an
S-function to be built by an S-Function Builder block. To display the dialog
box, click twice on the blocks icon or select the block and then select Open
Block from the model editors Edit menu or the blocks context menu. The
dialog box appears.
3-11
3 Writing S-Functions in C
The dialog box contains controls that let you enter information needed for the
S-Function Builder block to build an S-function to your specifications. The
controls are grouped into panes. See the following sections for information
on the panes and the controls that they contain.
3-12
S-Function Builder Dialog Box
Note The following sections use the term target S-function to refer to the
S-function specified by the S-Function Builder dialog box.
See Example: Modeling a Two-Input/Two-Output System on page 3-35
for an example showing how to use the S-Function Builder to model a
two-input/two-output discrete state-space system.
Parameters/S-Function Name Pane
This pane displays the target S-functions name and parameters.
The pane contains the following controls.
S-function name
Specifies the name of the target S-function.
S-function parameters
This table displays the parameters of the target S-function. Each row of the
table corresponds to a parameter, and each column displays a property of the
parameter as follows:
Name Name of the parameter. Define and modify this property from
the Parameters Pane on page 3-21.
Data type Lists the data type of the parameter. Define and modify this
property from the Parameters Pane on page 3-21.
3-13
3 Writing S-Functions in C
Value Specifies the value of the parameter. Enter a valid MATLAB
expression in this field.
Port/Parameter Pane
This pane displays the ports and parameters that the dialog box specifies for
the target S-function.
The pane contains a tree control whose top nodes correspond to the
target S-functions input ports, output ports, and parameters, respectively.
Expanding the Input Ports, Output Ports, or Parameter node displays the
input ports, output ports, or parameters, respectively, specified for the
target S-function. Selecting any of the port or parameter nodes selects the
corresponding entry on the corresponding port or parameter specification
pane.
Initialization Pane
The Initialization pane allows you to specify basic features of the S-function,
such as the width of its input and output ports and its sample time.
3-14
S-Function Builder Dialog Box
The S-Function Builder uses the information that you enter on this pane to
generate the S-functions mdlInitializeSizes callback method. Simulink
invokes this method during the model initialization phase of the simulation
to obtain basic information about the S-function. (See How Simulink
Interacts with C S-Functions on page 3-74 for more information on the model
initialization phase.)
The Initialization pane contains the following fields.
Number of discrete states
Number of discrete states that the S-function has.
Discrete states IC
Initial conditions of the S-functions discrete states. You can enter the values
as a comma-separated list or as a vector (e.g., [0 1 2]). The number of initial
conditions must equal the number of discrete states.
3-15
3 Writing S-Functions in C
Number of continuous states
Number of continuous states that the S-function has.
Continuous states IC
Initial conditions of the S-functions continuous states. You can enter the
values as a comma-separated list or as a vector (e.g., [0 1 2]). The number of
initial conditions must equal the number of continuous states.
Sample mode
Sample mode of the S-function. The sample mode determines the length of
the interval between the times when the S-function updates its output. You
can select one of the following options:
Inherited
The S-function inherits its sample time from the block connected to its
input port.
Continuous
The block updates its outputs at each simulation step.
Discrete
The S-function updates its outputs at the rate specified in the Sample
time value field of the S-Function Builder dialog box.
Sample time value
Interval between updates of the S-functions outputs. This field is enabled
only if you have selected Discrete as the S-functions Sample mode.
Data Properties Pane
The Data Properties pane allows you to add ports and parameters to your
S-function.
3-16
S-Function Builder Dialog Box
The column of buttons to the left of the panes allows you to add, delete, or
reorder ports or parameters, depending on the currently selected pane.
To add a port or parameter, click the Add button (the top button in the
column of buttons).
To delete the currently selected port/parameter, click the Delete button
(located beneath the Add button).
To move the currently selected port/parameter up one position in the
corresponding S-Function port/parameter list, click the Up button (beneath
the Delete button).
To move the currently selected port/parameter down one position in the
corresponding S-function port/parameter list, click the Down button
(beneath the Up button).
This pane also contains tabbed panes that enable you to specify the attributes
of the ports and parameters that you create. See the following topics for more
information.
Input Ports Pane on page 3-18
3-17
3 Writing S-Functions in C
Output Ports Pane on page 3-19
Parameters Pane on page 3-21
Data Type Attributes Pane on page 3-22
Input Ports Pane
The Input Ports pane allows you to inspect and modify the properties of
the S-functions input ports.
The pane comprises an editable table that lists the properties of the input
ports in the order in which the ports appear on the S-function block. Each row
of the table corresponds to a port. Each entry in the row displays a property
of the port as follows.
Port name
Name of the port. Edit this field to change the port name.
Dimensions
Lists the number of dimensions of input signals accepted by the port. To
display a list of supported dimensions, click the adjacent button. To change
the ports dimensionality, select a new value from the list. Specify 1-D to size
the signal dynamically, regardless of the signals actual dimensionality.
3-18
S-Function Builder Dialog Box
Rows
Specifies the size of the input signals first (or only) dimension. Specify -1 to
size the signal dynamically.
Columns
Specifies the size of the input signals second dimension (only if the input port
accepts 2-D signals).
Note For input signals with two dimensions, if the row dimensions is
dynamically sized, the column dimension must also be dynamically sized or
set to 1. If the column dimension is set to some other value, the S-function
will compile, but any simulation containing this S-function will not run due to
an invalid dimension specification.
Complexity
Specifies whether the input port accepts real or complex-valued signals.
Frame
Specifies whether this port accepts frame-based signals generated by Signal
Processing Blockset or Communications Blockset. For more information, see
the documentation for these blocksets.
Output Ports Pane
The Output Ports pane allows you to inspect and modify the properties of
the S-functions output ports.
3-19
3 Writing S-Functions in C
The pane comprises an editable table that lists the properties of the output
ports in the order in which the ports appear on the S-function block. Each row
of the table corresponds to a port. Each entry in the row displays a property
of the port as follows.
Port name
Name of the port. Edit this field to change the port name.
Dimensions
Lists the number of dimensions of signals output by the port. To display a
list of supported dimensions, click the adjacent button. To change the ports
dimensionality, select a new value from the list. Specify 1-D to size the signal
dynamically, regardless of the signals actual dimensionality.
Rows
Specifies the size of the output signals first (or only) dimension. Specify -1 to
size the signal dynamically.
Columns
Specifies the size of the output signals second dimension (only if the port
outputs 2-D signals).
3-20
S-Function Builder Dialog Box
Note For output signals with two dimensions, if one of the dimensions is
dynamically sized the other dimension must also be dynamically sized or set
to 1. If the second dimension is set to some other value, the S-function will
compile, but any simulation containing this S-function will not run due to an
invalid dimension specification. In some cases, the default Simulink methods
that determine the dimensions of dynamically sized output ports may be
insufficient and both dimensions of the 2-D output signal may need to be
hard coded.
Complexity
Specifies whether the port outputs real or complex-valued signals.
Frame
Specifies whether this port outputs frame-based signals generated by Signal
Processing Blockset or Communications Blockset. For more information, see
the documentation for these blocksets.
Parameters Pane
The Parameters pane allows you to inspect and modify the properties of
the S-functions parameters.
The pane comprises an editable table that lists the properties of the
S-functions parameters. Each row of the table corresponds to a parameter.
The order in which the parameters appear corresponds to the order in which
3-21
3 Writing S-Functions in C
the user must specify them. Each entry in the row displays a property of the
parameter as follows.
Parameter name
Name of the parameter. Edit this field to change the name.
Data type
Lists the data type of the parameter. Click the adjacent button to display a
list of supported data types. To change the parameters data type, select a
new type from the list.
Complexity
Specifies whether the parameter has real or complex values.
Data Type Attributes Pane
This pane allows you to specify the data type attributes of the target
S-functions input and output ports.
The pane contains a table listing the data type attributes of each of
the S-functions ports. Only some of the fields in the table are editable.
Non-editable fields are grayed out. Each row corresponds to a port of the
target S-function. Each column specifies an attribute of the corresponding
port.
3-22
S-Function Builder Dialog Box
Port
Name of the port. This field is not editable.
Data Type
Data type of the port. To display a list of specifiable data types, select the
adjacent pulldown list control. To change the data type, select a different
data type from the list.
The remaining fields on this pane are enabled only if the Data Type field
specifies a fixed-point data type. See Fixed-Point Data for more information.
Libraries Pane
The Libraries pane allows you to specify the location of external code files
referenced by custom code that you enter in other panes of the S-Function
Builder dialog box.
The Libraries pane includes the following fields.
3-23
3 Writing S-Functions in C
Library/Object/Source files
External library, object code, and source files referenced by custom code that
you enter elsewhere on the S-Function Builder dialog box. List each file on
a separate line. If the file resides in the current directory, you need specify
only the files name. If the file resides in another directory, you must specify
the full path of the file.
Alternatively, you can also use this field to specify search paths for libraries,
object files, header files, and source files. To do this, enter the tag LIB_PATH,
INC_PATH, or SRC_PATH, respectively, followed by the path name. You can
make as many entries of this kind as you need but each must reside on a
separate line.
For example, consider an S-Function Builder project that resides at
d:\matlab6p5\work and needs to link against the following files:
c:\customfolder\customfunctions.lib
d:\matlab7\customobjs\userfunctions.obj
d:\externalsource\freesource.c
The following entries enable the S-Function Builder to find these files:
SRC_PATH d:\externalsource
LIB_PATH $MATLABROOT\customobjs
LIB_PATH c:\customfolder\customfunctions.lib
userfunctions.obj
freesource.c
As this example illustrates, you can use LIB_PATH to specify both object
and library file paths. You can include the library name in the LIB_PATH
declaration, however you must place the object file name on a separate line.
The tag $MATLABROOT indicates a path relative to the MATLAB installation.
You include multiple LIB_PATH entries on separate lines. The paths are
searched in the order specified.
You can also enter preprocessor (-D) directives in this field, e.g.,
-DDEBUG
3-24
S-Function Builder Dialog Box
Each directive must reside on a separate line.
Includes
Header files containing declarations of functions, variables, and macros
referenced by custom code that you enter elsewhere on the S-Function Builder
dialog box. Specify each file on a separate line as #include statements. Use
brackets to enclose the names of standard C header files (e.g., #include
<math.h>). Use quotation marks to enclose names of custom header files (e.g.,
#include "myutils.h"). If your S-function uses custom include files that do
not reside in the current directory, you must use the INC_PATH tag in the
Library/Object/Source files field to set the S-Function Builders include
path to the directories containing the include files (see Library/Object/Source
files on page 3-24).
External function declarations
Declarations of external functions not declared in the header files listed in
the Includes field. Put each declaration on a separate line. The S-Function
Builder includes the specified declarations in the S-function source file that it
generates. This allows S-function code that computes the S-functions states
or output to invoke the external functions.
Outputs Pane
Use the Outputs pane to enter code that computes the outputs of the
S-function at each simulation time step.
3-25
3 Writing S-Functions in C
The Outputs pane contains the following fields.
Code for the mdlOutputs function
Code that computes the output of the S-function at each simulation time step
(or sample time hit, in the case of a discrete S-function). When generating the
source code for the S-function, the S-Function Builder inserts the code in this
field in a wrapper function of the form
void sfun_Outputs_wrapper(const real_T *u,
real_T *y,
const real_T *xD, /* optional */
const real_T *xC, /* optional */
const real_T *param0, /* optional */
int_T p_width0 /* optional */
real_T *param1 /* optional */
int_t p_width1 /* optional */
int_T y_width, /* optional */
int_T u_width) /* optional */
{
3-26
S-Function Builder Dialog Box
/* Your code inserted here */
}
where sfun is the name of the S-function. The S-Function Builder inserts
a call to this wrapper function in the mdlOutputs callback method that it
generates for your S-function. Simulink invokes the mdlOutputs method
at each simulation time step (or sample time step in the case of a discrete
S-function) to compute the S-functions output. The S-functions mdlOutputs
method in turn invokes the wrapper function containing your output code.
Your output code then actually computes and returns the S-functions output.
The mdlOutputs method passes some or all of the following arguments to
the outputs wrapper function.
Argument Description
u0, u1, ... uN Pointers to arrays containing the inputs to the
S-function, where N is the number of input ports
specified on the Input ports pane found on the Data
Properties pane. The names of the arguments that
appear in the outputs wrapper function are the same
as the names found on the Input ports pane. The
width of each array is the same as the input width
specified for each input on the Input ports pane. If
you specified -1 as an input width, the width of the
array is specified by the wrapper functions u_width
argument (see below).
3-27
3 Writing S-Functions in C
Argument Description
y0, y1, ... yN Pointer to arrays containing the outputs of the
S-function, where N is the number of output ports
specified on the Output ports pane found on the
Data Properties pane. The names of the arguments
that appear in the outputs wrapper function are
the same as the names found on the Output ports
pane. The width of each array is the same as the
output width specified for each output on the Output
ports pane. If you specified -1 as the output width,
the width of the array is specified by the wrapper
functions y_width argument (see below). Use this
array to pass the outputs that your code computes
back to Simulink.
xD Pointer to an array containing the discrete states
of the S-function. This argument appears only if
you specified discrete states on the Initialization
pane. At the first simulation time step, the discrete
states have the initial values that you specified on
the Initialization pane. At subsequent sample-time
steps, the states are obtained from the values that
the S-function computes at the preceding time step
(see Discrete Update Pane on page 3-31 for more
information).
xC Pointer to an array containing the continuous states
of the S-function. This argument appears only if you
specified continuous states on the Initialization
pane. At the first simulation time step, the continuous
states have the initial values that you specified on the
Initialization pane. At subsequent time steps, the
states are obtained by numerically integrating the
derivatives of the states at the preceding time step
(see Continuous Derivatives Pane on page 3-29 for
more information).
3-28
S-Function Builder Dialog Box
Argument Description
param0, p_width0,
param1, p_width1,
... paramN,
p_widthN
param0, param1, ...paramN are pointers to arrays
containing the S-functions parameters, where N is the
number of parameters specified on the Parameters
pane found on the Data Properties pane. p_width0,
p_width1, ...p_widthN are the widths of the parameter
arrays. If a parameter is a matrix, the width equals
the product of the dimensions of the arrays. For
example, the width of a 3-by-2 matrix parameter
is 6. These arguments appear only if you specify
parameters on the Data Properties pane.
y_width Width of the array containing the S-functions outputs.
This argument appears in the generated code only
if you specified -1 as the width of the S-functions
output. If the output is a matrix, y_width is the
product of the dimensions of the matrix.
u_width Width of the array containing the S-functions inputs.
This argument appears in the generated code only if
you specified -1 as the width of the S-functions input.
If the input is a matrix, u_width is the product of the
dimensions of the matrix.
These arguments permit you to compute the output of the block as a function
of its inputs and, optionally, its states and parameters. The code that you
enter in this field can invoke external functions declared in the header files or
external declarations on the Libraries pane. This allows you to use existing
code to compute the outputs of the S-function.
Inputs are needed in the output function
Selected if the current values of the S-functions inputs are used to compute
its outputs. Simulink uses this information to detect algebraic loops created
by directly or indirectly connecting the S-functions output to its input.
Continuous Derivatives Pane
If the S-function has continuous states, use the Continuous Derivatives
pane to enter code required to compute the state derivatives.
3-29
3 Writing S-Functions in C
Enter code to compute the derivatives of the S-functions continuous states
in the Code for the mdlDerivatives function field on this pane. When
generating code, the S-Function Builder takes the code in this pane and
inserts it in a wrapper function of the form
void sfun_Derivatives_wrapper(const real_T *u,
const real_T *y,
real_T *dx,
real_T *xC,
const real_T *param0, /* optional */
int_T p_width0, /* optional */
real_T *param1,/* optional */
int_T p_width1, /* optional */
int_T y_width, /* optional */
int_T u_width) /* optional */
{
/* Your code inserted here. */
}
3-30
S-Function Builder Dialog Box
where sfun is the name of the S-function. The S-Function Builder inserts a
call to this wrapper function in the mdlDerivatives callback method that it
generates for the S-function. Simulink calls the mdlDerivatives method
at the end of each time step to obtain the derivatives of the S-functions
continuous states (see How Simulink Interacts with C S-Functions on
page 3-74). The Simulink solver numerically integrates the derivatives to
determine the continuous states at the next time step. At the next time step,
Simulink passes the updated states back to the S-functions mdlOutputs
method (see Outputs Pane on page 3-25).
The generated S-functions mdlDerivatives callback method passes the
following arguments to the derivatives wrapper function:
u
y
dx
xC
param0, p_width0, param1, p_width1, ... paramN, p_widthN
y_width
u_width
The dx argument is a pointer to an array whose width is the same as the
number of continuous derivatives specified on the Initialization pane. Your
code should use this array to return the values of the derivatives that it
computes. See Outputs Pane on page 3-25 for the meanings and usage of the
other arguments. The arguments allow your code to compute derivatives as a
function of the S-functions inputs, outputs, and, optionally, parameters. Your
code can invoke external functions declared on the Libraries pane.
Discrete Update Pane
If the S-function has discrete states, use the Discrete Update pane to enter
code that computes at the current time step the values of the discrete states
at the next time step.
3-31
3 Writing S-Functions in C
Enter code to compute the values of the S-functions discrete states in the
Code for the mdlUpdate function field on this pane. When generating
code, the S-Function Builder takes the code in this pane and inserts it in a
wrapper function of the form
void sfun_Update_wrapper(const real_T *u,
const real_T *y,
real_T *xD,
const real_T *param0, /* optional */
int_T p_width0, /* optional */
real_T *param1,/* optional */
int_T p_width1, /* optional */
int_T y_width, /* optional */
int_T u_width) /* optional */
{
/* Your code inserted here. */
}
3-32
S-Function Builder Dialog Box
where sfun is the name of the S-function. The S-Function Builder inserts
a call to this wrapper function in the mdlUpdate callback method that it
generates for the S-function. Simulink calls the mdlUpdate method at the end
of each time step to obtain the values of the S-functions discrete states at the
next time step (see How Simulink Interacts with C S-Functions on page
3-74). At the next time step, Simulink passes the updated states back to the
S-functions mdlOutputs method (see Outputs Pane on page 3-25).
The generated S-functions mdlUpdates callback method passes the following
arguments to the updates wrapper function:
u
y
xD
param0, p_width0, param1, p_width1, ... paramN, p_widthN
y_width
u_width
See Outputs Pane on page 3-25 for the meanings and usage of these
arguments. Your code should use the xD (discrete states) variable to return
the values of the discrete states that it computes. The arguments allow your
code to compute the discrete states as functions of the S-functions inputs,
outputs, and, optionally, parameters. Your code can invoke external functions
declared on the Libraries pane.
Build Info Pane
Use the Build Info pane to specify options for building the S-function
MEX-file.
3-33
3 Writing S-Functions in C
This pane contains the following fields.
Show compile steps
Log each build step in the Compilation diagnostics field.
Create a debuggable MEX-file
Include debug information in the generated MEX-file.
Generate wrapper TLC
Generate a TLC file. You do not need to generate a TLC file if you do not
expect the S-function ever to run in accelerated mode or be used in a model
from which RealTime Workshop generates code.
Save code only
Do not build a MEX-file from the generated source code.
3-34
S-Function Builder Dialog Box
Enable access to SimStruct
Makes the SimStruct (S) accessible to the wrapper functions that S-Function
Builder generates. This enables you to use the SimStruct macros and
functions with your code in the Outputs, Continuous Derivatives, and
Discrete Updates panes. For example, with this option enabled, you can use
macros such as ssGetT in code that computes the S-functions outputs:
double t = ssGetT(S);
if(t < 2 ) {
y0[0] = u0[0];
} else {
y0[0]= 0.0;
}
For a complete listing of SimStruct macros and functions, see in the online
documentation.
Additional methods
Click this button to include TLC methods in your S-function. The following
dialog box appears.
Check the methods you want to add and click the Close button to include
the methods in your S-function. See Block Target File Methods for more
information.
Example: Modeling a Two-Input/Two-Output System
The example sfbuilder_example.mdl shows how to use the S-Function Builder
to model a two-input/two-output discrete state-space system with two states.
3-35
3 Writing S-Functions in C
In the example, the state-space matrices are parameters to the S-function and
the S-function input and output are vectors. You can find a manually written
version of the S-function in dsfunc.c.
Note You need to build the S-function before running the example model.
To build the S-function, double-click on the S-Function Builder block in the
model and click Build on the S-Function Builder dialog box that opens.
Initializing S-Function Settings
The Initialization pane specifies the number of discrete states and their
initial conditions, as well as sets the sample time of the S-function. This
example contains two discrete states, each initialized to 1, and a discrete
sample mode with a sample time of 1.
Initializing Inputs, Outputs, and Parameters
The Data Properties pane specifies the dimensions of the S-function input
and output, as well as initializes the state-space matrices.
3-36
S-Function Builder Dialog Box
The Input ports pane defines the one S-function input port as a 1-D vector
with two rows.
The Output ports pane similarly defines the one S-function output port as
a 1-D vector with two rows.
3-37
3 Writing S-Functions in C
The Parameters pane defines four parameters, one for each of the four
state-space matrices.
The S-function parameters pane at the top of the S-Function Builder
contains the actual values for the state-space matrices, entered as MATLAB
expressions. In this example, each state-space parameter is a two-by-two
matrix. Alternatively, you could store the state-space matrices in variables
in the MATLAB workspace and enter the variable names into the Value
field for each parameter.
3-38
S-Function Builder Dialog Box
Defining the Output Method
The Outputs pane calculates the S-functions output as a function of the
input and state vectors and the state-space matrices. In the outputs code,
reference S-function parameters using the parameter names defined on the
Data Properties Parameters pane. Index into 2-D matrices using a
scalar index, keeping in mind that S-functions use zero-based indexing. For
example, to access the element C(2,1) in the S-function parameter C, use
C[1]in the S-function code.
The Outputs pane also selects the Inputs are needed in the output
function (direct feedthrough) option since this state-space model has a
nonzero D matrix.
Defining the Discrete Update Method
The Discrete Update pane updates the discrete states. As with the outputs
code, use the S-function parameter names and index into 2-D matrices using
a scalar index, keeping in mind that S-functions use zero-based indexing.
For example, to access the element A(2,1) in the S-function parameter A,
use A[1]in the S-function code. The variable xD stores the final values of
the discrete states.
3-39
3 Writing S-Functions in C
Building the State-Space Example
Click the Build button on the S-Function Builder to create an executable for
this S-function. You can now run the model and compare the output to the
original discrete state-space S-function contained in sfcndemo_dsfunc.mdl.
3-40
Example of a Basic C MEX S-Function
Example of a Basic C MEX S-Function
In this section...
Introducing an Example of a Basic C MEX S-Function on page 3-41
Defines and Includes on page 3-44
Callback Implementations on page 3-44
Simulink/Real-Time Workshop Interface on page 3-46
Building the Timestwo Example on page 3-46
Introducing an Example of a Basic C MEX S-Function
This section presents an example of a C MEX S-function that you
can use as a model for creating simple C S-functions. The example
is the timestwo S-function example that comes with Simulink (see
matlabroot/simulink/src/timestwo.c). This S-function outputs twice its
input.
The following model uses the timestwo S-function to double the amplitude
of a sine wave and plot it in a scope.
The block dialog for the S-function specifies timestwo as the S-function name;
the parameters field is empty.
The timestwo S-function contains the S-function callback methods shown
in this figure.
3-41
3 Writing S-Functions in C
The contents of timestwo.c are shown below. A description of the code is
provided after the example.
#define S_FUNCTION_NAME timestwo /* Defines and Includes */
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
static void mdlInitializeSizes(SimStruct *S)
{
ssSetNumSFcnParams(S, 0);
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) {
return; /* Parameter mismatch will be reported by Simulink */
}
if (!ssSetNumInputPorts(S, 1)) return;
ssSetInputPortWidth(S, 0, DYNAMICALLY_SIZED);
ssSetInputPortDirectFeedThrough(S, 0, 1);
if (!ssSetNumOutputPorts(S,1)) return;
ssSetOutputPortWidth(S, 0, DYNAMICALLY_SIZED);
ssSetNumSampleTimes(S, 1);
3-42
Example of a Basic C MEX S-Function
/* Take care when specifying exception free code - see sfuntmpl.doc */
ssSetOptions(S, SS_OPTION_EXCEPTION_FREE_CODE);
}
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, INHERITED_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0.0);
}
static void mdlOutputs(SimStruct *S, int_T tid)
{
int_T i;
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
real_T *y = ssGetOutputPortRealSignal(S,0);
int_T width = ssGetOutputPortWidth(S,0);
for (i=0; i<width; i++) {
*y++ = 2.0 *(*uPtrs[i]);
}
}
static void mdlTerminate(SimStruct *S){}
/* Simulink/Real-Time Workshop Interface */
#ifdef MATLAB_MEX_FILE /* Is this file being compiled as a MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration function */
#endif
This example has three parts:
Defines and includes
Callback implementations
Simulink (or Real-Time Workshop) interface
3-43
3 Writing S-Functions in C
Defines and Includes
The example starts with the following defines.
#define S_FUNCTION_NAME timestwo
#define S_FUNCTION_LEVEL 2
The first specifies the name of the S-function (timestwo). The second specifies
that the S-function is in the level 2 format (for more information about level
1 and level 2 S-functions, see Converting Level 1 C MEX S-Functions to
Level 2 on page 3-89).
After defining these two items, the example includes simstruc.h, which
is a header file that gives access to the SimStruct data structure and the
MATLAB Application Program Interface (API) functions.
#define S_FUNCTION_NAME timestwo
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
The simstruc.h file defines a data structure, called the SimStruct, that
Simulink uses to maintain information about the S-function. The simstruc.h
file also defines macros that enable your MEX-file to set values in and get
values (such as the input and output signal to the block) from the SimStruct
(see Chapter 9, SimStruct Functions By Category).
Callback Implementations
The next part of the timestwo S-function contains implementations of
callback methods required by Simulink.
mdlInitializeSizes
Simulink calls mdlInitializeSizes to inquire about the number of input and
output ports, sizes of the ports, and any other objects (such as the number
of states) needed by the S-function.
The timestwo implementation of mdlInitializeSizes specifies the following
size information:
Zero parameters
3-44
Example of a Basic C MEX S-Function
This means that the S-function parameters field of the S-functionss
dialog box must be empty. If it contains any parameters, Simulink reports
a parameter mismatch.
One input port and one output port
The widths of the input and output ports are dynamically sized. This tells
Simulink that the S-function can accept an input signal of any width. Note
that the default handling for dynamically sized S-functions for this case
(one input and one output) is that the input and output widths are equal.
One sample time
The timestwo example specifies the actual value of the sample time in the
mdlInitializeSampleTimes routine.
The code is exception free.
Specifying exception-free code speeds up execution of your S-function. You
must take care when specifying this option. In general, if your S-function
isnt interacting with MATLAB, it is safe to specify this option. For more
details, see How Simulink Interacts with C S-Functions on page 3-74.
mdlInitializeSampleTimes
Simulink calls mdlInitializeSampleTimes to set the sample times of the
S-function. A timestwo block executes whenever the driving block executes.
Therefore, it has a single inherited sample time, INHERITED_SAMPLE_TIME.
mdlOutputs
Simulink calls mdlOutputs at each time step to calculate a blocks outputs.
The timestwo implementation of mdlOutputs takes the input, multiplies it by
2, and writes the answer to the output.
The timestwo mdlOutputs method uses a SimStruct macro,
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
to access the input signal. The macro returns a vector of pointers, which
you must access using
*uPtrs[i]
3-45
3 Writing S-Functions in C
For more details, see Data View on page 3-78.
The timestwo mdlOutputs method uses the macro
real_T *y = ssGetOutputPortRealSignal(S,0);
to access the output signal. This macro returns a pointer to an array
containing the blocks outputs.
The S-function uses
int_T width = ssGetOutputPortWidth(S,0);
to get the width of the signal passing through the block. Finally, the S-function
loops over the inputs to compute the outputs. ()
mdlTerminate
Perform tasks at the end of the simulation. This is a mandatory S-function
routine. However, the timestwo S-function doesnt need to perform any
termination actions, so this routine is empty.
Simulink/Real-Time Workshop Interface
At the end of the S-function, specify code that attaches this example to either
Simulink or Real-Time Workshop. This trailer is required at the end of every
S-function. If it is omitted, any attempt to compile the S-function will abort
with a failure during build of exports file error message.
#ifdef MATLAB_MEX_FILE
#include "simulink.c"
#else
#include "cg_sfun.h"
#endif
Building the Timestwo Example
To incorporate this S-function into Simulink, enter
mex timestwo.c
3-46
Example of a Basic C MEX S-Function
at the command line. The mex command compiles and links the timestwo.c
file to create a dynamically loadable executable for Simulink to use.
The resulting executable is referred to as a MEX S-function, where MEX
stands for MATLAB EXecutable. The MEX-file extension varies from
platform to platform. For example, on a 32bit Microsoft Windows system,
the MEX-file extension is .mexw32.
3-47
3 Writing S-Functions in C
Templates for C S-Functions
In this section...
About the Templates for C S-Functions on page 3-48
S-Function Source File Requirements on page 3-48
The SimStruct on page 3-51
Data Types in S-Functions on page 3-51
Compiling C S-Functions on page 3-51
About the Templates for C S-Functions
Simulink provides skeleton implementations of C MEX S-functions,
called templates, intended to serve as starting points for creating your
own S-functions. The templates contain skeleton implementations of
callback methods with comments that explain their use. The template file,
sfuntmpl_basic.c, which can be found in the directory simulink/src below
the MATLAB root directory, contains commonly used S-function routines. A
template containing all available routines (as well as more comments) can be
found in sfuntmpl_doc.c in the same directory.
Note We recommend that you use the C MEX-file template when developing
MEX S-functions.
S-Function Source File Requirements
This section describes requirements that every S-function source file must
meet to compile correctly. The S-function templates meet these requirements.
Statements Required at the Top of S-Functions
For S-functions to operate properly, each source module of your S-function
that accesses the SimStruct must contain the following sequence of defines
and include
#define S_FUNCTION_NAME your_sfunction_name_here
#define S_FUNCTION_LEVEL 2
3-48
Templates for C S-Functions
#include "simstruc.h"
where your_sfunction_name_here is the name of your S-function (i.e., what
you enter in the Simulink S-Function block dialog). These statements give
you access to the SimStruct data structure that contains pointers to the data
used by the simulation. The included code also defines the macros used to
store and retrieve data in the SimStruct, described in detail in Converting
Level 1 C MEX S-Functions to Level 2 on page 3-89. In addition, the code
specifies that you are using the level 2 format of S-functions.
Note All S-functions from Simulink 1.3 through 2.1 are considered to be Level
1 S-functions. They are compatible with Simulink 3.0, but we recommend that
you write new S-functions in the Level 2 format.
The following headers are included by
matlabroot/simulink/include/simstruc.h when
compiling as a MEX-file.
Header Files Included by simstruc.h When Compiling as a MEX-File
Header File Description
matlabroot/extern/include/tmwtypes.h General data types, e.g., real_T
matlabroot/extern/include/mex.h MATLAB MEX-file API routines to
interface MEX-files with MATLAB
matlabroot/extern/include/matrix.h MATLAB External Interface API
routines to query and manipulate
MATLAB matrices
When compiling your S-function for use with Real-Time Workshop,
simstruc.h includes the following.
3-49
3 Writing S-Functions in C
Header Files Included by simstruc.h When Used by Real-Time
Workshop
Header File Description
matlabroot/extern/include/tmwtypes.h General types, e.g., real_T
matlabroot/rtw/c/src/rt_matrx.h Macros for MATLAB API
routines
Callback Methods That an S-Function Must Implement
The S-function API requires you to implement the following functions (see
Writing Callback Methods on page 3-82):
mdlInitializeSizes specifies the sizes of various parameters in the
SimStruct, such as the number of output ports for the block.
mdlInitializeSampleTimes specifies the sample time(s) of the block.
mdlOutputs calculates the output of the block.
mdlTerminate performs any actions required at the termination of the
simulation. If no actions are required, this function can be implemented as
a stub.
Statements Required at the Bottom of S-Functions
Include this trailer code at the end of your C MEX S-function main module
only.
#ifdef MATLAB_MEX_FILE /* Is this being compiled as MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration func */
#endif
These statements select the appropriate code for your particular application:
simulink.c is included if the file is being compiled into a MEX-file.
cg_sfun.h is included if the file is being used in conjunction with the
Real-Time Workshop to produce a stand-alone or real-time executable.
3-50
Templates for C S-Functions
Note This trailer code must not be in the body of any S-function routine.
The SimStruct
The file matlabroot/simulink/include/simstruc.h is a C language header
file that defines the Simulink data structure and the SimStruct access
macros. It encapsulates all the data relating to the model or S-function,
including block parameters and outputs.
There is one SimStruct data structure allocated for the Simulink model.
Each S-function in the model has its own SimStruct associated with it.
The organization of these SimStructs is much like a directory tree. The
SimStruct associated with the model is the root SimStruct. The SimStructs
associated with the S-functions are the child SimStructs.
Simulink provides a set of macros that S-functions can use to access the fields
of the SimStruct. See Chapter 9, SimStruct Functions By Category for
more information.
Data Types in S-Functions
The file matlabroot/extern/include/tmwtypes.h is a C language header
file that defines a set of data types used in the S-function template and in the
SimStruct. These data types, such as real_T, uint32_T, etc., provide a way to
switch between different data types for 16, 32, and 64 bit systems, allowing
greater platform independence and flexibility.
S-functions are not required to use these data types. For example, you can
edit the Simulink example matlabroot/simulink/src/csfunc.c on a PC
and change real_T to double and int_T to int. If you compile and simulate
the S-function, the results will be identical to the results using the previous
data types.
Compiling C S-Functions
S-functions can be compiled in one of three modes identified by the presence
of one of the following defines:
3-51
3 Writing S-Functions in C
MATLAB_MEX_FILE Indicates that the S-function is being built as a
MEX-file for use with Simulink.
RT Indicates that the S-function is being built with the Real-Time
Workshop generated code for a real-time application using a fixed-step
solver.
NRT Indicates that the S-function is being built with the Real-Time
Workshop generated code for a non-real-time application using a
variable-step solver.
These define statements do not appear in the S-function. The mode definition
are made by either the mex command or by Real-Time Workshop when the
S-function is built.
3-52
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
Integrating Existing C Functions into Simulink Models with
the Legacy Code Tool
In this section...
Overview on page 3-53
Example of Integrating Existing C Functions into Simulink Models with
the Legacy Code Tool on page 3-56
Registering Legacy Code Tool Data Structures on page 3-60
Declaring Legacy Code Tool Function Specifications on page 3-62
Generating and Compiling the S-Functions on page 3-69
Generating a Masked S-Function Block for Calling a Generated
S-Function on page 3-70
Forcing Accelerator Mode to Use S-Function TLC Inlining Code on page
3-71
Handling Multiple Registration Files on page 3-71
Deploying Generated S-Functions on page 3-72
Legacy Code Tool Demos on page 3-72
Legacy Code Tool Limitations on page 3-73
Overview
You can integrate existing C (or C++) functionsfor example, device
drivers, lookup tables, and general functions and interfacesinto Simulink
simulations by using the Legacy Code Tool. Using specifications that
you supply as M-code, the tool transforms existing functions into C MEX
S-functions that you can include in Simulink models. If you use Real-Time
Workshop to generate code from a model, the Legacy Code Tool can insert an
appropriate call to your C function into the generated code (for details, see
Using the Legacy Code Tool to Automate the Generation of Files for Fully
Inlined S-Functions in the Real-Time Workshop documentation).
In comparison to using the S-Function Builder or writing an S-function, the
Legacy Code Tool can be easier to use and it generates optimized code (does not
generate wrapper code) often required by embedded systems. However, you
3-53
3 Writing S-Functions in C
should consider one of the alternate approaches for a hybrid system, such as a
system that includes a plant and controller, or a system component written in
a language other than C or C++. Alternative approaches are more flexible in
that they support more Simulink features and programming languages.
To interact with the Legacy Code Tool, you
Use a Legacy Code Tool data structure to specify
- A name for the S-function
- Specifications for the existing C functions
- Files and paths required for compilation
- Options for the generated S-function
Use the legacy_code function to
- Initialize the Legacy Code Tool data structure for a given C function
- Generate an S-function for use during simulation
- Compile and link the generated S-function into a dynamically loadable
executable
- Generate a masked S-function block for calling the generated S-function
- Generate a TLC block file and, if necessary, an rtwmakecfg.m file for
code generation (Real-Time Workshop license required)
Note Before you can use legacy_code, you must ensure that a C compiler is
set up for your MATLAB installation. If you need to set up a compiler, enter
the command mex -setup in the MATLAB Command Window.
The following diagram illustrates a general procedure for using the Legacy
Code Tool. Example of Integrating Existing C Functions into Simulink
Models with the Legacy Code Tool on page 3-56 provides an example that
uses the Legacy Code Tool to transform an existing C function into a Simulink
C MEX S-function.
3-54
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
If you have a Real-Time Workshop license, see Using the Legacy Code Tool
to Automate the Generation of Files for Fully Inlined S-Functions in the
3-55
3 Writing S-Functions in C
Real-Time Workshop documentation for information on using the Legacy
Code Tool for code generation.
Example of Integrating Existing C Functions into
Simulink Models with the Legacy Code Tool
Suppose you have an existing C function that outputs the value of its
floating-point input multiplied by two. The function is defined in a source
file named doubleIt.c, and its declaration exists in a header file named
doubleIt.h as shown here.
#include doubleIt.h
double doubleIt(double, inVal)
{
return(2 * inVal);
}
doubleIt.c
#ifndef _DOUBLEIT_H_
#define _DOUBLEIT_H_
double doubleIt(double inVal);
#endif
doubleIt.h
To use the Legacy Code Tool to incorporate this C function into a Simulink
model as a C MEX S-function:
1 Use the legacy_code function to initialize a MATLAB structure with fields
that represent Legacy Code Tool properties. For example, create a Legacy
Code Tool data structure named def by entering the following command at
the MATLAB prompt:
def = legacy_code('initialize')
The Legacy Code Tool data structure named def displays its fields in the
MATLAB Command Window as shown here:
def =
SFunctionName: ''
InitializeConditionsFcnSpec: ''
OutputFcnSpec: ''
StartFcnSpec: ''
TerminateFcnSpec: ''
3-56
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
HeaderFiles: {}
SourceFiles: {}
HostLibFiles: {}
TargetLibFiles: {}
IncPaths: {}
SrcPaths: {}
LibPaths: {}
SampleTime: 'inherited'
Options: [1x1 struct]
2 Specify appropriate values for fields in the Legacy Code Tool data structure
to identify properties of the existing C function. For example, specify the C
function source and header filenames by entering the following commands
at the MATLAB prompt:
def.SourceFiles = {'doubleIt.c'};
def.HeaderFiles = {'doubleIt.h'};
You must also specify information about the S-function that the Legacy
Code Tool produces from the C code. For example, specify a name for the
S-function and its output function declaration by entering:
def.SFunctionName = 'ex_sfun_doubleit';
def.OutputFcnSpec = 'double y1 = doubleIt(double u1)';
See thelegacy_code reference page in the Simulink reference for
information about the various data structure fields. For more information
about assigning values to fields in a structure, see Structures in the
MATLAB documentation.
3 Use the legacy_code function to generate an S-function source file from
the existing C function. At the MATLAB prompt, type:
legacy_code('sfcn_cmex_generate', def);
The Legacy Code Tool uses the information specified in def to create the
S-function source file named ex_sfun_doubleit.c in the current MATLAB
directory.
4 Make sure a C compiler is set up for your MATLAB installation. If you
need to set up a compiler, enter the command mex -setup in the MATLAB
Command Window.
3-57
3 Writing S-Functions in C
5 Use the legacy_code function to compile and link the S-function source
file into a dynamically loadable executable that Simulink can use. At the
MATLAB prompt, type:
legacy_code('compile', def);
The following messages appear in the MATLAB Command Window:
### Start Compiling ex_sfun_doubleit
mex('ex_sfun_doubleit.c', 'd:\work\lct_demos\doubleIt.c', '-Id:\wor
### Finish Compiling ex_sfun_doubleit
### Exit
On a 32-bit Microsoft Windows system, the resulting S-function executable
is named ex_sfun_doubleit.mexw32.
6 Use the legacy_code function to insert a masked S-Function block into a
Simulink model. The Legacy Code Tool configures the block to use the C
MEX S-function created in the previous step. Also, the tool masks the
block such that it displays the value of its OutputFcnSpec property (see
the description of the legacy_code function). For example, create a new
Simulink model containing a masked S-Function block by issuing the
following command at the MATLAB prompt:
legacy_code('slblock_generate', def);
The block appears in an empty model editor window as shown here:
3-58
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
The following Simulink model demonstrates that the C MEX S-function
produced by the Legacy Code Tool behaves like the C function doubleIt. In
particular, the S-Function block named ex_sfun_doubleit returns the value
of its floating-point input multiplied by two.
3-59
3 Writing S-Functions in C
Registering Legacy Code Tool Data Structures
The first step to using the Legacy Code Tool is to register one or more
MATLAB structures with fields that represent properties of the existing C
code and the S-function being generated. The registration process is flexible.
You can choose to set up resources and initiate registration in a variety of
ways, including
Placing all required header and source files in the current working
directory or in a hierarchical directory structure
Generating and placing one or more S-functions in the current working
directory
3-60
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
Having one or more registration files in the same directory
To register a Legacy Code Tool data structure:
1 Use the legacy_code function, specifying 'initialize' as the first
argument.
lct_spec = legacy_code('initialize')
The Legacy Code Tool data structure named lct_spec displays its fields in
the MATLAB Command Window as shown below:
lct_spec =
SFunctionName: ''
InitializeConditionsFcnSpec: ''
OutputFcnSpec: ''
StartFcnSpec: ''
TerminateFcnSpec: ''
HeaderFiles: {}
SourceFiles: {}
HostLibFiles: {}
TargetLibFiles: {}
IncPaths: {}
SrcPaths: {}
LibPaths: {}
SampleTime: 'inherited'
Options: [1x1 struct]
2 Define values for the data structure fields (properties) that apply to your
existing C function and the S-function you intend to generate. Minimally,
you must specify
Source and header files for the existing C function (SourceFiles and
HeaderFiles)
A name for the S-function (SFunctionName)
At least one function specification for the S-function
(InitializeConditionsFcnSpec, OutputFcnSpec, StartFcnSpec,
TerminateFcnSpec)
3-61
3 Writing S-Functions in C
For a complete list of the structures fields with descriptions, see the
legacy_code function reference page.
If you define fields that specify compilation resources and you specify relative
paths, the Legacy Code Tool searches for the resources relative to the
following directories, in the following order:
1 Current working directory
2 C-MEX S-function directory, if different than the current working directory
3 Directories you specify
IncPaths for header files
SrcPaths for source files
LibPaths for target and host libraries
4 Directories on the MATLAB search path, excluding toolbox directories
Declaring Legacy Code Tool Function Specifications
The InitializeConditionsFcnSpec, OutputFcnSpec, StartFcnSpec, and
TerminateFcnSpec fields defined in the Legacy Code Tool data structure
(see the description of the legacy_code function) require string values that
adhere to a specific syntax format. The required syntax format enables the
Legacy Code Tool to map the return value and arguments of an existing C
function to the return value, inputs, outputs, parameters, and states of the
S-function that the tool generates.
General syntax
return-spec = function-name(argument-spec)
For example, the following string specifies a function named doubleIt with
return specification double y1 and input argument specification double u1.
def.OutputFcnSpec = 'double y1 = doubleIt(double u1)';
For more detail on declaring function specifications, see
Return Specification on page 3-63
3-62
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
Function Name on page 3-63
Argument Specification on page 3-64
Supported Data Types on page 3-67
Function Specification Rules on page 3-68
Return Specification
The return specification defines the data type and variable name for the
return value of the existing C function.
return-type return-variable
return-type A data type listed in Supported Data Types on page
3-67.
return-variable Token of the form y1, y2, ..., yn, where n is the total
number of output arguments.
If the function does not return a value, you can omit the return specification
or specify it as void.
The following table shows valid function specification syntax for an integer
return value. Use the table to identify the syntax you should use for your
C function prototype.
Return Type C Function Prototype Legacy Code Tool
Function Specification
No return
value
void myfunction(...) void myfunction(...)
Scalar value int = myfunction(...) int16 y1 =
myfunction(...)
Function Name
The function name that you specify must be the same as your existing C
function name.
For example, consider the following C function prototype:
3-63
3 Writing S-Functions in C
float doubleIt(float inVal);
In this case, the function name in the Legacy Code Tool function specification
must be doubleIt.
You should not specify the name of a C macro. If you must, set the field
Options.isMacro to 1 to ensure that the generated code remains safe in the
event that expression folding is enabled.
Argument Specification
The argument specification defines one or more data type and token pairs that
represent the input, output, parameter, and state arguments of the existing C
function. The functions input and output arguments map to Simulink input
and output ports, parameters map to Simulink workspace parameters, and
states map to Simulink Dwork vectors.
argument-type argument-token
argument-type A data type listed in Supported Data Types on page
3-67.
argument-token Token of one of the following forms:
Input u1, u2, ..., un, where n is the total number
of input arguments
Output y1, y2, ..., yn, where n is the total
number of output arguments
Parameter p1, p2, ..., pn, where n is the total
number of parameter arguments
States (persistent memory) work1, work2,
..., workn, where n is the total number of state
arguments
If the function has no arguments, you can omit the argument specification
or specify it as void.
Consider the following C function prototype:
float powerIt(float inVal, int exponent);
3-64
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
To generate an S-function that is to call the preceding function at each time
step, you would set the Legacy Code Tool data structure field OutputFcnSpec
to the following string:
'double y1 = powerIt(double u1, int16 p1)'
Using this function specification, Simulink maps the following:
Return Value or
Argument...
of C Type... To Token... of Simulink
Type...
Return value float y1 double
inVal float u1 double
exponent int p1 int16
The following table shows valid function specification syntax for arguments of
type integer. Use the table to identify and then adapt the syntax you should
use for your C function prototype.
Argument Type C Function Prototype Legacy Code Tool Function
Specification
Input Arguments
No arguments function(void) function(void)
Scalar pass by value function(int in1) function(int16 u1)
Scalar pass by pointer function(int *in1) function(int16 u1[1])
Fixed vector function(int in1[10]) or
function(int *in1)
function(int16 u1[10])
Variable vector function(int in1[]) or
function(int *in1)
function(int16 u1[])
Fixed matrix function(int in1[15]) or
function(int in1[]) or
function(int *in1)
function(int16 u1[3][5])
Variable matrix function(int in1[]) or
function(int *in1)
function(int16 u1[][])
Output Arguments
3-65
3 Writing S-Functions in C
Argument Type C Function Prototype Legacy Code Tool Function
Specification
Scalar pointer function(int *y1) function(int16 y1[1])
Fixed vector function(int y1[10]) or
function(int *y1)
function(int16 y1[10])
Fixed matrix function(int y1[15]) or
function(int y1[]) or
function(int *y1)
function(int16 y1[3][5])
Parameter Arguments
Scalar pass by value function(int p1) function(int16 p1)
Scalar pass by pointer function(int *p1) function(int16 p1[1])
Fixed vector function(int p1[10]) or
function(int *p1)
function(int16 p1[10])
Variable vector function(int p1[]) or
function(int *p1)
function(int16 p1[])
Fixed matrix function(int p1[15]) or
function(int p1[]) or
function(int *p1)
function(int16 p1[3][5])
Variable matrix function(int p1[]) or
function(int *p1)
function(int16 p1[][])
State Arguments
Scalar pointer function(int *work1)
function(void *work1)
function(void **work1)
function(int16 work1[1])
void function(void
*work1)
void function(void
**work1)
Fixed vector function(int work1[10]) or
function(int *work1)
function(int16 work1[10])
Fixed matrix function(int work1[15]) or
function(int work1[]) or
function(int *work1)
function(int16
work1[3][5])
3-66
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
Supported Data Types
Data Type Supported
for Input and
Output?
Supported
for
Parameters?
Supported
for States?
Data Types Supported by
Simulink
Yes Yes Yes
Simulink.Bus
1
(scalar
only)
Yes N/A Yes
Simulink.NumericType
2
Yes Yes Yes
Simulink.AliasType
1
Yes Yes Yes
Fixed-point
3
Yes Yes Yes
Fi objects N/A Yes N/A
Complex numbers
4
Yes Yes Yes
1D array Yes Yes Yes
2D array
5
Yes Yes Yes
nD array
6
Yes Yes Yes
void * No No Yes
void ** No No Yes
1 You must supply the header file that declares the structure of the bus or the
header file that defines the data type with the same name as an alias. The
structure of the bus declared in the header file must match the structure of
the bus object (for example, the number and order of elements, data types
and widths of elements, and so on). For an example, see sldemo_lct_bus.
2 You must supply the header file that defines the data type only if the
numeric data type is also an alias.
3 You must declare the data as a Simulink.NumericType object (unspecified
scaling is not supported). For examples, see sldemo_lct_fixpt_signals
and sldemo_lct_fixpt_params.
4 Limited to use with Simulink built-in data types. To specify a complex data
type, enclose the built-in data type within angle brackets (<>) and prepend
3-67
3 Writing S-Functions in C
the word complex (for example, complex<double>). For an example, see
sldemo_lct_cplxgain.
5 MATLAB, Simulink, and Real-Time Workshop store two-dimensional
matrix data in column-major format as a vector. If your external function
code is written for row-major data, transpose the matrix data in MATLAB.
6 For a multidimensional signal, you can use the size function to determine
the number of elements in the signal. For examples, see sldemo_lct_lut
and sldemo_lct_ndarray.
For more information, see Data Types Supported by Simulink.
Function Specification Rules
Legacy Code Tool function specifications must adhere to the following rules:
If an argument is not scalar, you must pass the argument by reference.
The function must not change the value of input arguments.
The functions return value cannot be a pointer.
Function specifications you define for the StartFcnSpec,
InitializeConditionsFcnSpec, or TerminateFcnSpec cannot access
input or output arguments.
The numbering of input, output, parameter, and state argument tokens
must start at 1 and increase monotonically.
For a given Legacy Code Tool data structure, the data type and size of
input, output, parameter, and state arguments must be the same across
function specifications for StartFcnSpec, InitializeConditionsFcnSpec,
OutputFcnSpec, and TerminateFcnSpec.
You can use the size function to
- Get the size of any input, output, parameter, or state argument and pass
the size as input to the legacy function
- Specify the input, output, or state argument dimensions as a function of
other input or parameter argument dimensions
Consider the following example, which demonstrates both uses of the
function:
3-68
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
def.OutputFcnSpec=
'void foo(double p1[][], double u1[size(p1,2)], double y1[size(u1,1)], ...
double work1[size(u1,1)], int32 size(u1,1))'
- p1 is a 2-dimensional parameter that is sized dynamically
- u1 is a 1-dimensional vector with the same number of elements as the
second dimension of p1
- y1 is a 1-dimensional vector with the same number of element as u1
- work1 is a 1-dimensional vector with the same number of element as u1
- int32 size(u1,1) returns the number of elements in the vector u1 as
the fifth input argument
Generating and Compiling the S-Functions
After you register a Legacy Code Tool data structure for an existing C
function, use the legacy_code function as explained below to generate,
compile, and link the S-function.
1 Generate a C MEX S-function based on the information defined in the
structure. Call legacy_code with 'sfcn_cmex_generate' as the first
argument and the name of the data structure as the second argument.
legacy_code('sfcn_cmex_generate', lct_spec);
2 Make sure a C compiler is set up for your MATLAB installation. If you
need to set up a compiler, enter the command mex -setup in the MATLAB
Command Window.
3 Compile and link the S-function. This step assumes that a C compiler is set
up for your MATLAB installation. Call legacy_code with 'compile' as the
first argument and the name of the data structure as the second argument.
legacy_code('compile', lct_spec);
Informational messages similar to the following appear in the MATLAB
Command Window and a dynamically loadable executable results.
On a 32-bit Microsoft Windows system, Simulink names the file
ex_sfun_doubleit.mexw32.
3-69
3 Writing S-Functions in C
### Start Compiling ex_sfun_doubleit
mex ex_sfun_doubleit.c -Id:\work\lct\lct_demos
### Finish Compiling ex_sfun_doubleit
### Exit
As a convenience, you can generate, compile, and link the S-function in a
single step by calling legacy_code with the string 'generate_for_sim'.
The function also generates a TLC file for accelerated simulations, if the
Options.useTlcWithAccel field of the Legacy Code Tool data structure
is set (1).
Once you have generated a dynamically loadable executable, you or others can
use it in a model by adding an S-Function block that specifies the compiled
S-function.
Generating a Masked S-Function Block for Calling
a Generated S-Function
You have the option of using the Legacy Code Tool to generate a masked
S-function block (graphical representation) that is configured to call a
generated C MEX S-function. To generate such a block, call legacy_code
with 'slblock_generate' as the first argument and the name of the Legacy
Code Tool data structure as the second argument.
legacy_code('slblock_generate', lct_spec);
The tool masks the block such that it displays the value of the OutputFcnSpec
field. You can then add the block to a model manually.
If you prefer that the Legacy Code Tool add the block to a model automatically,
specify the name of the model as a third argument. For example:
legacy_code('slblock_generate', lct_spec, 'myModel');
If the specified model (for example, myModel.mdl) exists, legacy_code opens
the model and adds the masked S-function block described by the Legacy Code
Tool data structure. If the model does not exist, the function creates a new
model with the specified name and adds the masked S-function block.
3-70
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
Forcing Accelerator Mode to Use S-Function TLC
Inlining Code
If you are using Simulink Accelerator mode, you can generate and force the
use of TLC inlining code for the S-function generated by the Legacy Code
Tool. To do this:
1 Generate a TLC block file for the S-function by calling the legacy_code
function with 'sfcn_tlc_generate' as the first argument and the name of
the Legacy Code Tool data structure as the second argument.
legacy_code('sfcn_tlc_generate', lct_spec);
Consider the example in Example of Integrating Existing C Functions into
Simulink Models with the Legacy Code Tool on page 3-56. To generate
a TLC file for the model shown at the end of that example, enter the
following command:
legacy_code('sfcn_tlc_generate', def);
2 Force Accelerator mode to use the TLC file by using
thessSetOptions SimStruct function to set the S-function
option SS_OPTION_USE_TLC_WITH_ACCELERATOR.
Handling Multiple Registration Files
You can have multiple registration files in the same directory and generate
an S-function for each file with a single call to legacy_code. Likewise, you
can use a single call to legacy_code to compile and link the S-functions and
another to generate corresponding TLC block files, if appropriate.
Consider the following example, where lct_register_1, lct_register_2,
and lct_register_3 each create and initialize fields of a Legacy Code Tool
structure.
defs1 = lct_register_1;
defs2 = lct_register_2;
defs3 = lct_register_3;
defs = [desfs1(:);defs2(:);defs3(:)];
You can then use the following sequence of calls to legacy_code to generate
files based on the three registration files:
3-71
3 Writing S-Functions in C
legacy_code('sfcn_cmex_generate', defs);
legacy_code('compile', defs);
legacy_code('sfcn_tlc_generate', defs);
Alternatively, you can process each registration file separately. For example:
defs1 = lct_register1;
legacy_code('sfcn_cmex_generate', defs1);
legacy_code('compile', defs1);
legacy_code('sfcn_tlc_generate', defs1);
.
.
.
defs2 = lct_register2;
legacy_code('sfcn_cmex_generate', defs2);
legacy_code('compile', defs2);
legacy_code('sfcn_tlc_generate', defs2);
.
.
.
defs3 = lct_register3;
legacy_code('sfcn_cmex_generate', defs3);
legacy_code('compile', defs3);
legacy_code('sfcn_tlc_generate', defs3);
Deploying Generated S-Functions
You can deploy the S-functions that you generate with the Legacy Code Tool
for use by others. To deploy an S-function for simulation use only, you need to
share only the compiled dynamically loadable executable.
Legacy Code Tool Demos
Simulink provides a set of demos that show applications of the Legacy
Code Tool. To review the list of the demos, enter the following command in
MATLAB Command Window and review the demos listed under the heading
Calling Legacy C and C++ Functions.
demo('simulink', 'modeling features')
3-72
Integrating Existing C Functions into Simulink Models with the Legacy Code Tool
Legacy Code Tool Limitations
Legacy Code Tool generates C MEX S-functions for existing functions
written in C or C++. The tool does not support transformation of MATLAB,
Fortran, or Ada functions.
Complex number support is limited to use with Simulink built-in data
types.
3-73
3 Writing S-Functions in C
How Simulink Interacts with C S-Functions
In this section...
Introduction on page 3-74
Process View on page 3-74
Data View on page 3-78
Introduction
It is helpful in writing C MEX-file S-functions to understand how Simulink
interacts with S-functions. This section examines the interaction from two
perspectives: a process perspective, i.e., at which points in a simulation
Simulink invokes the S-function, and a data perspective, i.e., how Simulink
and the S-function exchange information during a simulation.
Process View
The following figures show the order in which Simulink invokes an
S-functions callback methods. Solid rectangles indicate callbacks that always
occur during model initialization and/or at every time step. Dotted rectangles
indicate callbacks that may occur during initialization and/or at some or
all time steps during the simulation loop. See the documentation for each
callback method in Chapter 8, S-Function Callback Methods Alphabetical
List to determine the exact circumstances under which Simulink invokes
the callback.
Note The process view diagram represents the execution of S-functions
that contain continuous and discrete states, enable zero-crossing detection,
and reside in a model that uses a variable-step solver. Different solvers
omit certain steps in the diagram. For a better understanding on how
Simulink executes your particular S-function, use the Simulink debugger. See
Simulink Debugger in Using Simulink for more information.
3-74
How Simulink Interacts with C S-Functions
3-75
3 Writing S-Functions in C
3-76
How Simulink Interacts with C S-Functions
Calling Structure for Real-Time Workshop
When generating code, Real-Time Workshop does not go through the entire
calling sequence outlined above. After initializing the model as outlined in
the preceding section, Simulink calls mdlRTW, an S-function routine unique
to Real-Time Workshop, mdlTerminate, and exits.
For more information about Real-Time Workshop and how it interacts with
S-functions, see the Real-Time Workshop documentation and the Real-Time
Workshop Target Language Compiler Reference Guide.
Alternate Calling Structure for External Mode
When you are running Simulink in external mode, the calling sequence for
S-function routines changes. This picture shows the correct sequence for
external mode.
Simulink calls mdlRTW once when it enters external mode and again each
time a parameter changes or when you select Update Diagram under your
models Edit menu.
Note Running Simulink in external mode requires Real-Time Workshop.
For more information about external mode, see the Real-Time Workshop
documentation.
3-77
3 Writing S-Functions in C
Data View
S-function blocks have input and output signals, parameters, and internal
states, plus other general work areas. In general, block inputs and outputs
are written to, and read from, a block I/O vector. Inputs can also come from
External inputs via the root inport blocks
Ground if the input signal is unconnected or grounded
Block outputs can also go to the external outputs via the root outport blocks.
In addition to input and output signals, S-functions can have
Continuous states
Discrete states
Other working areas such as real, integer or pointer work vectors
You can parameterize S-function blocks by passing parameters to them using
the S-function block dialog box.
The following figure shows the general mapping between these various types
of data.
3-78
How Simulink Interacts with C S-Functions
An S-functions mdlInitializeSizes routine sets the sizes of the various
signals and vectors. S-function methods called during the simulation loop can
determine the sizes and values of the signals.
An S-function method can access input signals in two ways:
Via pointers
Using contiguous inputs
Accessing Signals Using Pointers
During the simulation loop, accessing the input signals is performed using
InputRealPtrsType uPtrs =
ssGetInputPortRealSignalPtrs(S,portIndex)
This is an array of pointers, where portIndex starts at 0. There is one for
each input port. To access an element of this signal you must use
*uPtrs[element]
as described by this figure.
3-79
3 Writing S-Functions in C
Note that input array pointers can point at noncontiguous places in memory.
You can retrieve the output signal by using this code.
real_T *y = ssGetOutputPortSignal(S,outputPortIndex);
Accessing Contiguous Input Signals
An S-functions mdlInitializeSizes method can specify that the elements
of its input signals must occupy contiguous areas of memory, using
ssSetInputPortRequiredContiguous. If the inputs are contiguous, other
methods can use ssGetInputPortSignal to access the inputs.
Accessing Input Signals of Individual Ports
This section describes how to access all input signals of a particular port and
write them to the output port. The preceding figure shows that the input array
of pointers can point to noncontiguous entries in the block I/O vector. The
output signals of a particular port form a contiguous vector. Therefore, the
3-80
How Simulink Interacts with C S-Functions
correct way to access input elements and write them to the output elements
(assuming the input and output ports have equal widths) is to use this code.
int_T element;
int_T portWidth = ssGetInputPortWidth(S,inputPortIndex);
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,inputPortIndex);
real_T *y = ssGetOutputPortSignal(S,outputPortIdx);
for (element=0; element<portWidth; element++) {
y[element] = *uPtrs[element];
}
A common mistake is to try to access the input signals via pointer arithmetic.
For example, if you were to place
real_T *u = *uPtrs; /* Incorrect */
just below the initialization of uPtrs and replace the inner part of the above
loop with
*y++ = *u++; /* Incorrect */
the code compiles, but the MEX-file might crash Simulink. This is because it
is possible to access invalid memory (which depends on how you build your
model). When accessing the input signals incorrectly, a crash occurs when the
signals entering your S-function block are not contiguous. Noncontiguous
signal data occurs when signals pass through virtual connection blocks such
as the Mux or Selector blocks.
To verify that you are correctly accessing wide input signals, pass a replicated
signal to each input port of your S-function. You do this by creating a Mux
block with the number of input ports equal to the width of the desired signal
entering your S-function. Then the driving source should be connected to each
input port as shown in this figure.
3-81
3 Writing S-Functions in C
Writing Callback Methods
Writing an S-function basically involves creating implementations of the
callback functions that Simulink invokes during a simulation. For guidelines
on implementing a particular callback, see the documentation for the callback
in Chapter 8, S-Function Callback Methods Alphabetical List. For
information on using callbacks to implement specific block features, such as
parameters or sample times, see Chapter 7, Implementing Block Features.
3-82
Using S-Functions in Normal Mode Referenced Models
Using S-Functions in Normal Mode Referenced Models
When a C S-function appears in a referenced model that executes in Normal
mode, successful execution is impossible if all of the following are true:
The S-function has both an mdlProcessParameters function and an
mdlStart function.
The mdlProcessParameters function depends on the mdlStart function.
The referenced model calls mdlProcessParameters before calling mdlStart.
Execution fails because mdlProcessParameters has dependency requirements
that mdlStart has not satisfied. Automated analysis cannot guard against all
possible causes of such failure: you must check your code manually and verify
that mdlProcessParameters is not in any way dependent on mdlStart being
called first. Examples of such dependency include:
Allocating memory in mdlStart and using that memory in
mdlProcessParameters. This is often done using ssSetUserData and
ssGetUserData.
Initializing any DWork or any global memory in mdlStart and reading the
values in mdlProcessParameters.
To remind you to check for any such dependency problems, an error message
appears by default for any S-function that is used in a Normal-mode
referenced model and contains both an mdlProcessParameters function and
an mdlStart function. The error message does not mean that any dependency
problems exist, but only that they might exist.
If you get such an error message, check for any problematic dependencies
in the S-function, and recode as needed to eliminate them. When no such
dependencies exist, you can use the S-function in a Normal mode referenced
model. You can then safely suppress the error message. To certify that the
S-function is compliant, and the message is therefore unnecessary, include
the following statement in mdlInitializeSizes:
ssSetModelReferenceNormalModeSupport (S, MDL_START_AND_MDL_PROCESS_PARAMS_OK);
3-83
3 Writing S-Functions in C
For information about referenced models, see Referencing a Model in the
Simulink documentation, and Generating Code for Model Referencing in the
Real-Time Workshop documentation.
3-84
Debugging C MEX S-Functions
Debugging C MEX S-Functions
In this section...
About Debugging C MEX S-Functions on page 3-85
Debugging C MEX S-Functions Using Microsoft Visual C/C++ .NET on
page 3-85
Debugging C MEX S-Functions Using UNIX on page 3-86
About Debugging C MEX S-Functions
This section contains examples on how to debug C MEX S-functions using one
of the following C compilers.
Microsoft Visual C/C++ .NET compiler (version 7.0)
UNIX compilers
Refer to your compiler documentation for further information on debugging
files. The examples use the Simulink demo model sfcndemo_timestwo.mdl
and the C MEX S-function matlabroot/simulink/src/timestwo.c. Save
these files to your working directory before proceeding with the examples.
Debugging C MEX S-Functions Using Microsoft Visual
C/C++ .NET
Before beginning the example, save the files sfcndemo_timestwo.mdl and
matlabroot/simulink/src/timestwo.c into your working directory.
1 Open the Simulink model sfcndemo_timestwo.mdl.
2 Create a debuggable version of the MEX-file by compiling the C-file using
the mex command with the -g option.
mex -g timestwo.c
The -g option creates the executable timestwo.mexw32 with debugging
symbols included. At this point, you may want to simulate the
sfcndemo_timestwo model to ensure it runs properly.
3-85
3 Writing S-Functions in C
3 Without exiting MATLAB, start the Microsoft Development Environment.
4 From the Microsoft Development Environment menu bar, select Tools >
Debug Processes.
5 In the Processes dialog box that opens:
a Select the MATLAB.exe process in the Available Processes list.
b Click Attach.
6 In the Attach to Process dialog box that opens:
a Select Native in the list of program types to debug.
b Click OK.
You should now be attached to the MATLAB process.
7 Click Close on the Processes dialog box.
8 From the Microsoft Development Environments File menu, select Open >
File. Select the timestwo.c source files from the file browser that opens.
9 Set a breakpoint on the desired line of code by right-clicking on the line
and selecting Insert Breakpoint from the context menu. If you have not
previously run the model, the breakpoint may show up with a question
mark, indicating that the executable is not loaded. Subsequently running
the model loads the .mexw32 file and removes the question mark from the
breakpoint.
10 Start the simulation from the sfcndemo_timestwo Simulink model.
You should be running the S-function in the Microsoft Development
Environment and can debug the file within that environment.
Debugging C MEX S-Functions Using UNIX
Before beginning the example, save the files sfcndemo_timestwo.mdl and
matlabroot/simulink/src/timestwo.c into your working directory.
1 Open the Simulink model sfcndemo_timestwo.mdl.
2 Create a debuggable version of the MEX-file by compiling the C-file using
the mex command with the -g option
3-86
Debugging C MEX S-Functions
mex -g timestwo.c
The -g option creates the executable timestwo.mexw32 with debugging
symbols included. At this point, you may want to simulate the
sfcndemo_timestwo model to ensure it runs properly.
3 Exit MATLAB.
4 Start MATLAB in debugging mode using the following command.
matlab -D<nameOfDebugger>
The -D flag starts MATLAB within the specified debugger. For example, to
use the dbx debugging tool on Solaris, enter the following command.
matlab -Ddbx
5 Once the debugger has loaded, continue loading MATLAB by typing run at
the debugger prompt.
(dbx) run
Running: matlab
(process id 9375)
6 After MATLAB starts, enable debugging by entering the following
command at the MATLAB command prompt.
dbmex on
7 Open the sfcndemo_timestwo Simulink model.
8 Simulate the model. This brings you into the debugger.
9 Set breakpoints in the source code, for example:
(dbx) stop in mdlOutputs
(2) stop in `timestwo.mexs64`timestwo.c`mdlOutputs
(dbx) file timestwo.c
10 Issue the cont command to continue.
(dbx) cont
3-87
3 Writing S-Functions in C
11 Use your debuggers routines to debug the S-function.
3-88
Converting Level 1 C MEX S-Functions to Level 2
Converting Level 1 C MEX S-Functions to Level 2
In this section...
Guidelines for Converting Level 1 C MEX S-Functions to Level 2 on page
3-89
Obsolete Macros on page 3-92
Guidelines for Converting Level 1 C MEX S-Functions
to Level 2
Level 2 S-functions were introduced with Simulink 2.2. Level 1 S-functions
refer to S-functions that were written to work with Simulink 2.1 and previous
releases. Level 1 S-functions are compatible with Simulink 2.2 and subsequent
releases; you can use them in new models without making any code changes.
However, to take advantage of new features in S-functions, level 1 S-functions
must be updated to level 2 S-functions. Here are some guidelines:
Start by looking at simulink/src/sfunctmpl_doc.c. This template
S-function file concisely summarizes level 2 S-functions.
At the top of your S-function file, add this define:
#define S_FUNCTION_LEVEL 2
Update the contents of mdlInitializeSizes. In particular, add the
following error handling for the number of S-function parameters:
ssSetNumSFcnParams(S, NPARAMS); /*Number of expected parameters*/
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) {
/* Return if number of expected != number of actual parameters */
return;
}
Set up the inputs using:
if (!ssSetNumInputPorts(S, 1)) return; /*Number of input ports */
ssSetInputPortWidth(S, 0, width); /* Width of input
port one (index 0)*/
ssSetInputPortDirectFeedThrough(S, 0, 1); /* Direct feedthrough
or port one */
ssSetInputPortRequiredContiguous(S, 0);
3-89
3 Writing S-Functions in C
Set up the outputs using:
if (!ssSetNumOutputPorts(S, 1)) return;
ssSetOutputPortWidth(S, 0, width); /* Width of output port
one (index 0) */
If your S-function has a nonempty mdlInitializeConditions, update it
to the following form:
#define MDL_INITIALIZE_CONDITIONS
static void mdlInitializeConditions(SimStruct *S)
{
}
Otherwise, delete the function.
- Access the continuous states using ssGetContStates. The ssGetX macro
has been removed.
- Access the discrete states using ssGetRealDiscStates(S). The ssGetX
macro has been removed.
- For mixed continuous and discrete state S-functions, the state vector
no longer consists of the continuous states followed by the discrete
states. The states are saved in separate vectors and hence might not
be contiguous in memory.
The mdlOutputs prototype has changed from
static void mdlOutputs( real_T *y, const real_T *x,
const real_T *u, SimStruct *S, int_T tid)
to
static void mdlOutputs(SimStruct *S, int_T tid)
Since y, x, and u are not explicitly passed in to level-2 S-functions, you
must use
- ssGetInputPortSignal to access inputs
- ssGetOutputPortSignal to access the outputs
- ssGetContStates or ssGetRealDiscStates to access the states
3-90
Converting Level 1 C MEX S-Functions to Level 2
The mdlUpdate function prototype has changed from
void mdlUpdate(real_T *x, real_T *u, Simstruct *S, int_T tid)
to
void mdlUpdate(SimStruct *S, int_T tid)
If your S-function has a nonempty mdlUpdate, update it to this form:
#define MDL_UPDATE
static void mdlUpdate(SimStruct *S, int_T tid)
{
}
Otherwise, delete the function.
If your S-function has a nonempty mdlDerivatives, update it to this form:
#define MDL_DERIVATIVES
static void mdlDerivatives(SimStruct *S)
{
}
Otherwise, delete the function.
Replace all obsolete SimStruct macros. See Obsolete Macros on page 3-92
for a complete list of obsolete macros.
When converting level 1 S-functions to level 2 S-functions, you should build
your S-functions with full (i.e., highest) warning levels. For example, if you
have gcc on a UNIX system, use these options with the mex utility.
mex CC=gcc CFLAGS=-Wall sfcn.c
If your system has Lint, use this code.
lint -DMATLAB_MEX_FILE -I<matlabroot>/simulink/include
-Imatlabroot/extern/include sfcn.c
On a PC, to use the highest warning levels, you must create a project file
inside the integrated development environment (IDE) for the compiler you
are using. Within the project file, define MATLAB_MEX_FILE and add
3-91
3 Writing S-Functions in C
matlabroot/simulink/include
matlabroot/extern/include
to the path (be sure to build with alignment set to 8).
Obsolete Macros
The following macros are obsolete. Each obsolete macro should be replaced
with the specified macro.
Obsolete Macro Replace with
ssGetU(S), ssGetUPtrs(S) ssGetInputPortSignalPtrs(S,port),
ssGetInputPortSignal(S,port)
ssGetY(S) ssGetOutputPortRealSignal(S,port)
ssGetX(S) ssGetContStates(S), ssGetRealDiscStates(S)
ssGetStatus(S) Normally not used, but ssGetErrorStatus(S) is
available.
ssSetStatus(S,msg) ssSetErrorStatus(S,msg)
ssGetSizes(S) Specific call for the wanted item (i.e.,
ssGetNumContStates(S))
ssGetMinStepSize(S) No longer supported.
ssGetPresentTimeEvent(S,sti) ssGetTaskTime(S,sti)
ssGetSampleTimeEvent(S,sti) ssGetSampleTime(S,sti)
ssSetSampleTimeEvent(S,t) ssSetSampleTime(S,sti,t)
ssGetOffsetTimeEvent(S,sti) ssGetOffsetTime(S,sti)
ssSetOffsetTimeEvent(S,sti,t) ssSetOffsetTime(S,sti,t)
ssIsSampleHitEvent(S,sti,tid) ssIsSampleHit(S,sti,tid)
ssGetNumInputArgs(S) ssGetNumSFcnParams(S)
ssSetNumInputArgs(S, numInputArgs) ssSetNumSFcnParams(S,numInputArgs)
ssGetNumArgs(S) ssGetSFcnParamsCount(S)
ssGetArg(S,argNum) ssGetSFcnParam(S,argNum)
3-92
Converting Level 1 C MEX S-Functions to Level 2
Obsolete Macro Replace with
ssGetNumInputs ssGetNumInputPorts(S) and
ssGetInputPortWidth(S,port)
ssSetNumInputs ssSetNumInputPorts(S,nInputPorts) and
ssSetInputPortWidth(S,port,val)
ssGetNumOutputs ssGetNumOutputPorts(S) and
ssGetOutputPortWidth(S,port)
ssSetNumOutputs ssSetNumOutputPorts(S,nOutputPorts) and
ssSetOutputPortWidth(S,port,val)
3-93
3 Writing S-Functions in C
3-94
4
Creating C++ S-Functions
The procedure for creating C++ S-functions is nearly the same as that for
creating C S-functions (see Chapter 3, Writing S-Functions in C). The
following sections explain the differences.
Source File Format (p. 4-2) Explains the differences between
the source file structure of a C++
S-function and a C S-function.
Making C++ Objects Persistent
(p. 4-6)
How to create C++ objects that
persist across invocations of the
S-function.
Building C++ S-Functions (p. 4-8) How to build a C++ S-function.
4 Creating C++ S-Functions
Source File Format
The format of the C++ source for an S-function is nearly identical to that of
the source for an S-function written in C. The main difference is that you
must tell the C++ compiler to use C calling conventions when compiling the
callback methods. This is necessary because the Simulink simulation engine
assumes that callback methods obey C calling conventions.
To tell the compiler to use C calling conventions when compiling the callback
methods, wrap the C++ source for the S-function callback methods in an
extern "C" statement. The C++ version of the sfun_counter S-function
example (matlabroot/simulink/src/sfun_counter_cpp.cpp) illustrates
usage of the extern "C" directive to ensure that the compiler generates
Simulink-compatible callback methods:
/* File : sfun_counter_cpp.cpp
* Abstract:
*
* Example of an C++ S-function which stores an C++ object in
* the pointers vector PWork.
*
* Copyright 1990-2005 The MathWorks, Inc.
*
*/
#include "iostream.h"
class counter {
double x;
public:
counter() {
x = 0.0;
}
double output(void) {
x = x + 1.0;
return x;
}
};
#ifdef __cplusplus
4-2
Source File Format
extern "C" { // use the C fcn-call standard for all functions
#endif // defined within this scope
#define S_FUNCTION_LEVEL 2
#define S_FUNCTION_NAME sfun_counter_cpp
/*
* Need to include simstruc.h for the definition of the SimStruct and
* its associated macro definitions.
*/
#include "simstruc.h"
/*====================*
* S-function methods *
*====================*/
/* Function: mdlInitializeSizes ===============================================
* Abstract:
* The sizes information is used by Simulink to determine the S-function
* block's characteristics (number of inputs, outputs, states, etc.).
*/
static void mdlInitializeSizes(SimStruct *S)
{
/* See sfuntmpl_doc.c for more details on the macros below */
ssSetNumSFcnParams(S, 1); /* Number of expected parameters */
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) {
/* Return if number of expected != number of actual parameters */
return;
}
ssSetNumContStates(S, 0);
ssSetNumDiscStates(S, 0);
if (!ssSetNumInputPorts(S, 0)) return;
if (!ssSetNumOutputPorts(S, 1)) return;
ssSetOutputPortWidth(S, 0, 1);
ssSetNumSampleTimes(S, 1);
4-3
4 Creating C++ S-Functions
ssSetNumRWork(S, 0);
ssSetNumIWork(S, 0);
ssSetNumPWork(S, 1); // reserve element in the pointers vector
ssSetNumModes(S, 0); // to store a C++ object
ssSetNumNonsampledZCs(S, 0);
ssSetOptions(S, 0);
}
/* Function: mdlInitializeSampleTimes =========================================
* Abstract:
* This function is used to specify the sample time(s) for your
* S-function. You must register the same number of sample times as
* specified in ssSetNumSampleTimes.
*/
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, mxGetScalar(ssGetSFcnParam(S, 0)));
ssSetOffsetTime(S, 0, 0.0);
}
#define MDL_START /* Change to #undef to remove function */
#if defined(MDL_START)
/* Function: mdlStart =======================================================
* Abstract:
* This function is called once at start of model execution. If you
* have states that should be initialized once, this is the place
* to do it.
*/
static void mdlStart(SimStruct *S)
{
ssGetPWork(S)[0] = (void *) new counter; // store new C++ object in the
} // pointers vector
#endif /* MDL_START */
/* Function: mdlOutputs =======================================================
* Abstract:
* In this function, you compute the outputs of your S-function
* block. Generally outputs are placed in the output vector, ssGetY(S).
4-4
Source File Format
*/
static void mdlOutputs(SimStruct *S, int_T tid)
{
counter *c = (counter *) ssGetPWork(S)[0]; // retrieve C++ object from
real_T *y = ssGetOutputPortRealSignal(S,0); // the pointers vector and use
y[0] = c->output(); // member functions of the
} // object
/* Function: mdlTerminate =====================================================
* Abstract:
* In this function, you should perform any actions that are necessary
* at the termination of a simulation. For example, if memory was
* allocated in mdlStart, this is the place to free it.
*/
static void mdlTerminate(SimStruct *S)
{
counter *c = (counter *) ssGetPWork(S)[0]; // retrieve and destroy C++
delete c; // object in the termination
} // function
/*======================================================*
* See sfuntmpl_doc.c for the optional S-function methods *
*======================================================*/
/*=============================*
* Required S-function trailer *
*=============================*/
#ifdef MATLAB_MEX_FILE /* Is this file being compiled as a MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration function */
#endif
#ifdef __cplusplus
} // end of extern "C" scope
#endif
4-5
4 Creating C++ S-Functions
Making C++ Objects Persistent
Your C++ callback methods might need to create persistent C++ objects,
that is, objects that continue to exist after the method exits. For example, a
callback method might need to access an object created during a previous
invocation. Or one callback method might need to access an object created by
another callback method. To create persistent C++ objects in your S-function:
1 Create a pointer work vector to hold pointers to the persistent object
between method invocations:
static void mdlInitializeSizes(SimStruct *S)
{
...
ssSetNumPWork(S, 1); // reserve element in the pointers vector
// to store a C++ object
...
}
2 Store a pointer to each object that you want to be persistent in the pointer
work vector:
static void mdlStart(SimStruct *S)
{
ssGetPWork(S)[0] = (void *) new counter; // store new C++ object in the
} // pointers vector
3 Retrieve the pointer in any subsequent method invocation to access the
object:
static void mdlOutputs(SimStruct *S, int_T tid)
{
counter *c = (counter *) ssGetPWork(S)[0]; // retrieve C++ object from
real_T *y = ssGetOutputPortRealSignal(S,0); // the pointers vector and
y[0] = c->output(); // use member functions of
} // the object
4-6
Making C++ Objects Persistent
4 Destroy the objects when the simulation terminates:
static void mdlTerminate(SimStruct *S)
{
counter *c = (counter *) ssGetPWork(S)[0]; // retrieve and destroy C++
delete c; // object in the termination
} // function
4-7
4 Creating C++ S-Functions
Building C++ S-Functions
Use the MATLAB mex command to build C++ S-functions exactly the way you
use it to build C S-functions. For example, to build the C++ version of the
sfun_counter example, enter
mex sfun_counter_cpp.cpp
at the MATLAB command line.
Note The extension of the source file for a C++ S-function must be .cpp to
ensure that the compiler treats the files contents as C++ code.
4-8
5
Creating Ada S-Functions
Introduction (p. 5-2) Overview of creating Ada
S-functions.
Ada S-Function Source File Format
(p. 5-4)
Source code structure of an Ada
S-function.
Writing Callback Methods in Ada
(p. 5-8)
How to use Ada to implement
S-function callback methods.
Building an Ada S-Function (p. 5-11) Compiling and linking an Ada
S-function.
Example of an Ada S-Function
(p. 5-12)
An Ada version of the times_two
S-function example.
5 Creating Ada S-Functions
Introduction
In this section...
About Simulink and Ada on page 5-2
Ada Compiler Requirements on page 5-2
About Simulink and Ada
Simulink allows you to use the Ada programming language to create
S-functions. Simulink supports Ada S-functions on only the following 32-bit
platforms.
Windows (WIN32)
Linux (GLNX86)
As with S-functions coded in other programming languages, Simulink
interacts with an Ada S-function by invoking callback methods that the
S-function implements. Each method performs a predefined task, such as
computing block outputs, required to simulate the block whose functionality
the S-function defines. Creating an Ada S-function thus entails writing Ada
implementations of the callback methods required to simulate the S-function
and then compiling and linking the callbacks into a library that Simulink can
load and invoke during simulation. The following sections explain how to
perform these tasks. Simulink allows you to generate code for Ada S-functions
if they are inlined. See Inlining S-Functions in the Target Language
Compiler documentation for more information.
Ada Compiler Requirements
To build a MEX-file from Ada source code, using the mex tool, you must
have previously installed a copy of Version 3.12 (or higher) of the GNAT
Ada95 compiler on your system. You can obtain the latest Windows (WIN32)
and GNU-Linux (GLNX86) versions of the compiler at the GNAT ftp site
(ftp://cs.nyu.edu/pub/gnat). You can purchase a professional version from
http://www.adacore.com. Make sure that the compiler executable is in the
MATLAB command path so that the mex tool can find it.
5-2
Introduction
The GNAT Ada95 compiler package used to include gnatdll.exe, a tool
for building DLLs on Windows. This tool, which is required to build Ada
MEX-files on Windows, now comes as part of a separate gnatwin package
containing Windows-specific files. If you want to build Ada S-functions on a
Windows system, you must download and install the gnatwin package as
well as the GNAT Ada95 compiler.
5-3
5 Creating Ada S-Functions
Ada S-Function Source File Format
In this section...
Ada S-Function Specification on page 5-4
Ada S-Function Body on page 5-5
Ada S-Function Specification
To create an Ada S-function, you must create an Ada package that implements
the callback methods required to simulate the S-function. The S-function
package comprises a specification and a body.
The specification specifies the methods that the Ada S-function uses and
implements. The specification must specify that the Ada S-function uses the
Simulink package, which defines data types and functions that the S-function
can use to access the internal data structure (SimStruct) that Simulink
uses to store information about the S-function (see Chapter 9, SimStruct
Functions By Category). The specification and body of the Simulink
package reside in the matlabroot/simulink/ada/interface/ directory.
The specification should also specify each callback method that the S-function
implements as an Ada procedure exported to C. The following is an example of
an Ada S-function specification that meets these requirements.
-- The Simulink API for Ada S-Function
with Simulink; use Simulink;
package Times_Two is
-- The S_FUNCTION_NAME has to be defined as a constant
-- string.
S_FUNCTION_NAME : constant String := "times_two";
-- Every S-Function is required to have the
-- "mdlInitializeSizes" method.
-- This method needs to be exported as shown below, with the
-- exported name being "mdlInitializeSizes".
--
5-4
Ada S-Function Source File Format
procedure mdlInitializeSizes(S : in SimStruct);
pragma Export(C, mdlInitializeSizes, "mdlInitializeSizes");
procedure mdlOutputs(S : in SimStruct; TID : in Integer);
pragma Export(C, mdlOutputs, "mdlOutputs");
end Times_Two;
Ada S-Function Body
The Ada S-Function body provides the implementations of the S-function
callback methods, as illustrated in the following example.
with Simulink; use Simulink;
with Ada.Exceptions; use Ada.Exceptions;
package body Times_Two is
-- Function: mdlInitializeSizes ---------------------------------------------
-- Abstract:
-- Setup the input and output port attributes for this
-- S-Function.
--
procedure mdlInitializeSizes(S : in SimStruct) is
begin
-- Set the input port attributes
--
ssSetNumInputPorts( S, 1);
ssSetInputPortWidth( S, 0, DYNAMICALLY_SIZED);
ssSetInputPortDataType( S, 0, SS_DOUBLE);
ssSetInputPortDirectFeedThrough(S, 0, TRUE);
ssSetInputPortOverWritable( S, 0, FALSE);
ssSetInputPortOptimizationLevel(S, 0, 3);
-- Set the output port attributes
--
ssSetNumOutputPorts( S, 1);
ssSetOutputPortWidth( S, 0, DYNAMICALLY_SIZED);
ssSetOutputPortDataType( S, 0, SS_DOUBLE);
ssSetOutputPortOptimizationLevel(S, 0, 3);
5-5
5 Creating Ada S-Functions
-- Set the block sample time.
ssSetSampleTime( S, INHERITED_SAMPLE_TIME);
exception
when E : others =>
if ssGetErrorStatus(S) = "" then
ssSetErrorStatus(S,
"Exception occured in mdlInitializeSizes. " &
"Name: " & Exception_Name(E) & ", " &
"Message: " & Exception_Message(E) &
" and " & "Information: " &
Exception_Information(E));
end if;
end mdlInitializeSizes;
-- Function: mdlOutputs -----------------------------------------------------
-- Abstract:
-- Compute the S-Function's output,
-- given its input: y = 2 * u
--
procedure mdlOutputs(S : in SimStruct; TID : in Integer) is
uWidth : Integer := ssGetInputPortWidth(S,0);
U : array(0 .. uWidth-1) of Real_T;
for U'Address use ssGetInputPortSignalAddress(S,0);
yWidth : Integer := ssGetOutputPortWidth(S,0);
Y : array(0 .. yWidth-1) of Real_T;
for Y'Address use ssGetOutputPortSignalAddress(S,0);
begin
if uWidth = 1 then
for Idx in 0 .. yWidth-1 loop
Y(Idx) := 2.0 * U(0);
end loop;
else
for Idx in 0 .. yWidth-1 loop
Y(Idx) := 2.0 * U(Idx);
end loop;
5-6
Ada S-Function Source File Format
end if;
exception
when E : others =>
if ssGetErrorStatus(S) = "" then
ssSetErrorStatus(S,
"Exception occured in mdlOutputs. " &
"Name: " & Exception_Name(E) & ", " &
"Message: " & Exception_Message(E) & " and " &
"Information: " & Exception_Information(E));
end if;
end mdlOutputs;
end Times_Two;
5-7
5 Creating Ada S-Functions
Writing Callback Methods in Ada
In this section...
Callbacks Invoked by Simulink on page 5-8
Implementing Callbacks on page 5-10
Omitting Optional Callback Methods on page 5-10
SimStruct Functions on page 5-10
Callbacks Invoked by Simulink
Simulink interacts with an Ada S-function by invoking callback methods
that the S-function implements. The following diagram shows the callback
methods that Simulink invokes when interacting with an Ada S-function
during a simulation and the order in which Simulink invokes them.
5-8
Writing Callback Methods in Ada
Note When interacting with Ada S-functions, Simulink invokes only a subset
of the callback methods that it invokes for C S-functions. The Languages
Supported section of the reference page for each callback method specifies
whether Simulink invokes that callback when interacting with an Ada
S-function.
5-9
5 Creating Ada S-Functions
Implementing Callbacks
Simulink defines in a general way the task of each callback. The S-function
is free to perform the task according to the functionality it implements. For
example, Simulink specifies that the S-functions mdlOutputs method must
compute that blocks outputs at the current simulation time. It does not
specify what those outputs must be. This callback-based API allows you to
create S-functions, and hence custom blocks, that meet your requirements.
Chapter 8, S-Function Callback Methods Alphabetical List explains the
purpose of each callback and provides guidelines for implementing them.
C S-Function Examples on page 1-25 provides examples on using these
callbacks to implement specific S-function features, such as the ability to
handle multiple signal data types.
Omitting Optional Callback Methods
The method mdlInitializeSizes is the only callback that an Ada S-function
must implement. The source for your Ada S-function needs to include
implementations only for callbacks that it must handle. If the source for your
S-function does not include an implementation for a particular callback, the
mex tool that builds the S-function (see Building an Ada S-Function on page
5-11) provides a stub implementation.
SimStruct Functions
Simulink provides a set of functions that enable an Ada S-function to access
the internal data structure (SimStruct) that Simulink maintains for the
S-function. These functions consist of Ada wrappers around the SimStruct
macros used to access the SimStruct from a C S-function (see Chapter 9,
SimStruct Functions By Category). Simulink provides Ada wrappers for
a substantial subset of the SimStruct macros. The Languages Supported
section of the reference page for a macro specifies whether it has an Ada
wrapper.
5-10
Building an Ada S-Function
Building an Ada S-Function
To use your Ada S-function with Simulink, you must build a MATLAB
executable (MEX) file from the Ada source code for the S-function. Use the
MATLAB mex command to perform this step.
The mex syntax for building an Ada S-function MEX-file is
mex [-v] [-g] -ada SFCN.ads
where SFCN.ads is the name of the S-functions package specification, -g
creates a debuggable MEX-file, and -v causes Simulink to print each compile
step and final link step during the build process. To build the S-functions
package body, replace SFCN.ads with SFCN.adb.
For example, to build the times_two S-function example that comes with
Simulink, enter the command
mex -ada times_two.ads
5-11
5 Creating Ada S-Functions
Example of an Ada S-Function
In this section...
Overview of an Example of an Ada S-Function on page 5-12
Times_two Package Specification on page 5-13
Times_two Package Body on page 5-16
mdlInitializeSizes on page 5-18
mdlOutputs on page 5-18
Building the Times_two Example on page 5-19
Overview of an Example of an Ada S-Function
This section presents an example of a basic Ada S-function that you can
use as a model when creating your own Ada S-functions. The example
is the times_two S-function example that comes with Simulink (see
matlabroot/simulink/ada/examples/times_two/times_two.ads and
matlabroot/simulink/ada/examples/times_two/times_two.adb). This
S-function outputs twice its input.
The following model uses the times_two S-function to double the amplitude
of a sine wave and plot it in a scope.
The block dialog for the S-function specifies times_two as the S-function
name; the parameters field is empty.
The times_two S-function contains the S-function callback methods shown
in this figure.
5-12
Example of an Ada S-Function
The source code for the times_two S-function comprises two parts:
Package specification
Package body
Times_two Package Specification
The times_two package specification, times_two.ads, contains the following
code.
-- The Simulink API for Ada S-Function
with Simulink; use Simulink;
package Times_Two is
-- The S_FUNCTION_NAME has to be defined as a constant string. Note that
-- the name of the S-Function (ada_times_two) is different from the name
-- of this package (times_two). We do this so that it is easy to identify
-- this example S-Function in the MATLAB workspace. Normally you would use
-- the same name for S_FUNCTION_NAME and the package.
--
S_FUNCTION_NAME : constant String := "ada_times_two";
5-13
5 Creating Ada S-Functions
-- Every S-Function is required to have the "mdlInitializeSizes" method.
-- This method needs to be exported as shown below, with the exported name
-- being "mdlInitializeSizes".
--
procedure mdlInitializeSizes(S : in SimStruct);
pragma Export(C, mdlInitializeSizes, "mdlInitializeSizes");
procedure mdlOutputs(S : in SimStruct; TID : in Integer);
pragma Export(C, mdlOutputs, "mdlOutputs");
end Times_Two;
The package specification begins by specifying that the S-function uses the
Simulink package.
with Simulink; use Simulink;
The Simulink package defines Ada procedures for accessing the internal
data structure (SimStruct) that Simulink maintains for each S-function (see
Chapter 9, SimStruct Functions By Category).
Next the specification specifies the name of the S-function.
S_FUNCTION_NAME : constant String := "ada_times_two";
The name ada_times_two serves to distinguish the MEX-file generated from
Ada source from those generated from the times_two source coded in other
languages.
Finally the specification specifies the callback methods implemented by the
times_two S-function.
procedure mdlInitializeSizes(S : in SimStruct);
pragma Export(C, mdlInitializeSizes, "mdlInitializeSizes");
procedure mdlOutputs(S : in SimStruct; TID : in Integer);
pragma Export(C, mdlOutputs, "mdlOutputs");
5-14
Example of an Ada S-Function
The specification specifies that the Ada compiler should compile each method
as a C-callable function. This is because the Simulink engine assumes that
callback methods are C functions.
Note When building an Ada S-function, the MATLAB mex tool uses the
package specification to determine the callbacks that the S-function does not
implement. It then generates stubs for the nonimplemented methods.
5-15
5 Creating Ada S-Functions
Times_two Package Body
The times_two package body, times_two.adb, contains
with Simulink; use Simulink;
with Ada.Exceptions; use Ada.Exceptions;
package body Times_Two is
-- Function: mdlInitializeSizes ---------------------------------------------
-- Abstract:
-- Setup the input and output port attrubouts for this S-Function.
--
procedure mdlInitializeSizes(S : in SimStruct) is
begin
-- Set the input port attributes
--
ssSetNumInputPorts( S, 1);
ssSetInputPortWidth( S, 0, DYNAMICALLY_SIZED);
ssSetInputPortDataType( S, 0, SS_DOUBLE);
ssSetInputPortDirectFeedThrough(S, 0, TRUE);
ssSetInputPortOverWritable( S, 0, FALSE);
ssSetInputPortOptimizationLevel(S, 0, 3);
-- Set the output port attributes
--
ssSetNumOutputPorts( S, 1);
ssSetOutputPortWidth( S, 0, DYNAMICALLY_SIZED);
ssSetOutputPortDataType( S, 0, SS_DOUBLE);
ssSetOutputPortOptimizationLevel(S, 0, 3);
-- Set the block sample time.
ssSetSampleTime( S, INHERITED_SAMPLE_TIME);
exception
when E : others =>
if ssGetErrorStatus(S) = "" then
ssSetErrorStatus(S,
"Exception occured in mdlInitializeSizes. " &
"Name: " & Exception_Name(E) & ", " &
5-16
Example of an Ada S-Function
"Message: " & Exception_Message(E) & " and " &
"Information: " & Exception_Information(E));
end if;
end mdlInitializeSizes;
-- Function: mdlOutputs -----------------------------------------------------
-- Abstract:
-- Compute the S-Function's output, given its input: y = 2 * u
--
procedure mdlOutputs(S : in SimStruct; TID : in Integer) is
uWidth : Integer := ssGetInputPortWidth(S,0);
U : array(0 .. uWidth-1) of Real_T;
for U'Address use ssGetInputPortSignalAddress(S,0);
yWidth : Integer := ssGetOutputPortWidth(S,0);
Y : array(0 .. yWidth-1) of Real_T;
for Y'Address use ssGetOutputPortSignalAddress(S,0);
begin
if uWidth = 1 then
for Idx in 0 .. yWidth-1 loop
Y(Idx) := 2.0 * U(0);
end loop;
else
for Idx in 0 .. yWidth-1 loop
Y(Idx) := 2.0 * U(Idx);
end loop;
end if;
exception
when E : others =>
if ssGetErrorStatus(S) = "" then
ssSetErrorStatus(S,
"Exception occured in mdlOutputs. " &
"Name: " & Exception_Name(E) & ", " &
"Message: " & Exception_Message(E) & " and " &
"Information: " & Exception_Information(E));
end if;
5-17
5 Creating Ada S-Functions
end mdlOutputs;
end Times_Two;
The package body contains implementations of the callback methods needed
to implement the times_two example.
mdlInitializeSizes
Simulink calls mdlInitializeSizes to inquire about the number of input and
output ports, the sizes of the ports, and any other objects (such as the number
of states) needed by the S-function.
The times_two implementation of mdlInitializeSizes uses SimStruct
functions defined in the Simulink package to specify the following size
information:
One input port and one output port
The widths of the input and output port are dynamically sized. This tells
Simulink that the S-function can accept a signal of any width. Note that
the default handling for dynamically sized S-functions for this case (one
input and one output) is that the input and output widths are equal.
One sample time
Finally the method provides an exception handler to handle any errors that
occur in invoking the SimStruct functions.
mdlOutputs
Simulink calls mdlOutputs at each time step to calculate a blocks outputs.
The times_two implementation of mdlOutputs takes the input, multiplies it
by 2, and writes the answer to the output.
The times_two implementation of the mdlOutputs method uses the SimStruct
functions ssGetInputPortWidth and ssGetInputPortSignalAddress to access
the input signal.
uWidth : Integer := ssGetInputPortWidth(S,0);
U : array(0 .. uWidth-1) of Real_T;
5-18
Example of an Ada S-Function
for U'Address use ssGetInputPortSignalAddress(S,0);
Similarly, the mdlOutputs method uses the functions ssGetOutputPortWidth
and ssGetOutputPortSignalAddress to access the output signal.
yWidth : Integer := ssGetOutputPortWidth(S,0);
Y : array(0 .. yWidth-1) of Real_T;
for Y'Address use ssGetOutputPortSignalAddress(S,0);
Finally the method loops over the inputs to compute the outputs.
Building the Times_two Example
To build this S-function into Simulink, enter
mex -ada times_two.abs
at the command line.
5-19
5 Creating Ada S-Functions
5-20
6
Creating Fortran
S-Functions
Level 1 Versus Level 2 S-Functions
(p. 6-2)
Overview of approaches to writing
Fortran S-functions.
Creating Level 1 Fortran
S-Functions (p. 6-3)
Describes a purely Fortran approach
to creating an S-function.
Creating Level 2 Fortran
S-Functions (p. 6-8)
Describes a hybrid C/Fortran
approach to writing an S-function
that enables creation of more capable
blocks.
Porting Legacy Code (p. 6-19) How to wrap an S-function around
existing Fortran code.
6 Creating Fortran S-Functions
Level 1 Versus Level 2 S-Functions
There are two main strategies to executing Fortran code from Simulink. One
is from a Level 1 Fortran-MEX (F-MEX) S-function, the other is from a Level
2 gateway S-function written in C. Each has its advantages and both can be
incorporated into code generated by Real-Time Workshop. To have complete
code generation with Real-Time Workshop, you must inline the Fortran
S-function. See Inlining S-Functions in the Target Language Compiler
documentation for more information.
The original S-function interface was called the Level 1 API. As the
capabilities of Simulink grew, the S-function API was rearchitected into
the more extensible Level 2 API. This allows S-functions to have all the
capabilities of a full Simulink model (except automatic algebraic loop
identification and solving) and to grow as Simulink grows.
Note The Level 1 API supports creation of S-functions having only
continuous sample time. If you want to create a Fortran S-function with a
discrete sample time, you must use the Level 2 API.
6-2
Creating Level 1 Fortran S-Functions
Creating Level 1 Fortran S-Functions
In this section...
Fortran MEX Template File on page 6-3
Example of a Level 1 Fortran S-Function on page 6-3
Inline Code Generation Example on page 6-6
Fortran MEX Template File
A template file for Fortran MEX S-functions is located at
matlabroot/simulink/src/sfuntmpl_fortran.F. The template file compiles
as is and copies the input to the output.
To use the template to create a new Fortran S-function:
1 Create a copy under another filename.
2 Edit the copy to perform the operations you need.
3 Compile the edited file into a MEX-file, using the mex command.
4 Include the MEX-file in your model, using the S-Function block.
Example of a Level 1 Fortran S-Function
The example file, matlabroot/simulink/src/sfun_timestwo_for.F,
implements an S-function that multiplies its input by 2.
C
C File: SFUN_TIMESTWO_FOR.F
C
C Abstract:
C A sample Level 1 FORTRAN representation of a
C timestwo S-function.
C
C The basic mex command for this example is:
C
C >> mex sfun_timestwo_for.F simulink.F
C
6-3
6 Creating Fortran S-Functions
C Copyright 1990-2002 The MathWorks, Inc.
C
C
C
C=====================================================
C Function: SIZES
C
C Abstract:
C Set the size vector.
C
C SIZES returns a vector which determines model
C characteristics. This vector contains the
C sizes of the state vector and other
C parameters. More precisely,
C SIZE(1) number of continuous states
C SIZE(2) number of discrete states
C SIZE(3) number of outputs
C SIZE(4) number of inputs
C SIZE(5) number of discontinuous roots in
C the system
C SIZE(6) set to 1 if the system has direct
C feedthrough of its inputs,
C otherwise 0
C
C=====================================================
C
SUBROUTINE SIZES(SIZE)
C .. Array arguments ..
INTEGER*4 SIZE(*)
C .. Parameters ..
INTEGER*4 NSIZES
PARAMETER (NSIZES=6)
SIZE(1) = 0
SIZE(2) = 0
SIZE(3) = 1
SIZE(4) = 1
SIZE(5) = 0
SIZE(6) = 1
6-4
Creating Level 1 Fortran S-Functions
RETURN
END
C
C=====================================================
C
C Function: OUTPUT
C
C Abstract:
C Perform output calculations for continuous
C signals.
C
C=====================================================
C .. Parameters ..
SUBROUTINE OUTPUT(T, X, U, Y)
REAL*8 T
REAL*8 X(*), U(*), Y(*)
Y(1) = U(1) * 2.0
RETURN
END
C
C=====================================================
C
C Stubs for unused functions.
C
C=====================================================
SUBROUTINE INITCOND(X0)
REAL*8 X0(*)
C --- Nothing to do.
RETURN
END
SUBROUTINE DERIVS(T, X, U, DX)
REAL*8 T, X(*), U(*), DX(*)
C --- Nothing to do.
RETURN
6-5
6 Creating Fortran S-Functions
END
SUBROUTINE DSTATES(T, X, U, XNEW)
REAL*8 T, X(*), U(*), XNEW(*)
C --- Nothing to do.
RETURN
END
SUBROUTINE DOUTPUT(T, X, U, Y)
REAL*8 T, X(*), U(*), Y(*)
C --- Nothing to do.
RETURN
END
SUBROUTINE TSAMPL(T, X, U, TS, OFFSET)
REAL*8 T,TS,OFFSET,X(*),U(*)
C --- Nothing to do.
RETURN
END
SUBROUTINE SINGUL(T, X, U, SING)
REAL*8 T, X(*), U(*), SING(*)
C --- Nothing to do.
RETURN
END
A Level 1 S-functions input/output is limited to using the REAL*8 data type,
(DOUBLE PRECISION), which is equivalent to a double in C. Of course, the
internal calculations can use whatever data types you need.
To see how this S-function works, enter
sfcndemo_timestwo_for
at the MATLAB prompt and run the model.
Inline Code Generation Example
Real-Time Workshop users can use the sample block target file
matlabroot/toolbox/simulink/blocks/tlc_c/sfun_timestwo_for.tlc to
6-6
Creating Level 1 Fortran S-Functions
generate inlined code for sfcndemo_timestwo_for.mdl. If you want to learn
how to inline your own Fortran MEX-file, see Inlining S-Functions in the
Real-Time Workshop Target Language Compiler documentation.
6-7
6 Creating Fortran S-Functions
Creating Level 2 Fortran S-Functions
In this section...
About Creating Level 2 Fortran S-Functions on page 6-8
Template File on page 6-8
C/Fortran Interfacing Tips on page 6-8
Constructing the Gateway on page 6-13
Example C MEX S-Function Calling Fortran Code on page 6-16
About Creating Level 2 Fortran S-Functions
To use the features of a level 2 S-function with Fortran code, you must write a
skeleton S-function in C that has code for interfacing to Simulink and also
calls your Fortran code.
Using the C MEX S-function as a gateway is quite simple if you are writing
the Fortran code from scratch. If instead your Fortran code already exists as a
stand-alone simulation, there is some work to be done to identify parts of the
code that need to be registered with Simulink, such as identifying continuous
states if you are using variable-step solvers or getting rid of static variables if
you want to have multiple copies of the S-function in a Simulink model (see
Porting Legacy Code on page 6-19).
Template File
The file sfuntmpl_gate_fortran.c contains a template for creating a C
MEX-file S-function that invokes a Fortran subroutine in its mdlOutputs
method. It works with a simple Fortran subroutine if you modify the Fortran
subroutine name in the code.
C/Fortran Interfacing Tips
The following are some tips for creating the C-to-Fortran gateway S-function.
6-8
Creating Level 2 Fortran S-Functions
MEX Environment
Remember that mex -setup needs to find both the MATLAB C and the
Fortran compilers, but it can work with only one of these compilers at a time.
If you install or change compilers, you must run mex -setup between other
mex commands.
Test the installation and setup using sample MEX-files from the MATLAB C
and Fortran MEX examples in matlabroot/extern/examples/mex, as well as
Simulink examples, which are located in matlabroot/simulink/src.
If using a C compiler on Windows, test the mex setup using the
following commands and the example C source code file, yprime.c, in
matlabroot\extern\examples\mex.
cd([matlabroot '\extern\examples\mex'])
mex yprime.c
If using a Fortran compiler, test the mex setup using the following commands
and the example Fortran source code files, yprime.F and yprimefg.F, in
matlabroot\extern\examples\mex.
cd([matlabroot '\extern\examples\mex'])
mex yprimef.f yprimefg.f
For more information, see Building MEX-Files in the MATLAB External
Interfaces documentation.
Compiler Compatibility
Your C and Fortran compilers need to use the same object format. If you
use the compilers explicitly supported by the mex command this is not a
problem. When you use the C gateway to Fortran, it is possible to use Fortran
compilers not supported by the mex command, but only if the object file format
is compatible with the C compiler format. Common object formats include
ELF and COFF.
The compiler must also be configurable so that the caller cleans up the stack
instead of the callee. Compaq Visual Fortran (formerly known as Digital
Fortran) is one compiler whose default stack cleanup is the callee. However,
Intel Visual Fortran (the replacement for Compaq Visual Fortran) has the
default stack cleanup as the caller.
6-9
6 Creating Fortran S-Functions
Symbol Decorations
Symbol decorations can cause run-time errors. For example, g77 decorates
subroutine names with a trailing underscore when in its default configuration.
You can either recognize this and adjust the C function prototype or alter
the Fortran compilers name decoration policy via command-line switches, if
the compiler supports this. See the Fortran compiler manual about altering
symbol decoration policies.
If all else fails, use utilities such as od (octal dump) to display the symbol
names. For example, the command
od -s 2 <file>
lists strings and symbols in binary (.obj) files.
These binary utilities can be obtained for Windows as well. MKS is one
company that has commercial versions of powerful UNIX utilities, although
most can also be obtained free on the Web. hexdump is another common
program for viewing binary files. As an example, here is the output of
od -s 2 sfun_atmos_for.o
on Linux.
0000115 E
0000136 E
0000271 E
0000467 E@
0000530 E
0000575 E E 5@
0001267 Cf VC- :C
0001323 :|.-:8 #8 Kw6
0001353 ?333@
0001364 333
0001414 01.01
0001425 GCC: (GNU) egcs-2.91.66 19990314/Linux
0001522 .symtab
0001532 .strtab
0001542 .shstrtab
0001554 .text
6-10
Creating Level 2 Fortran S-Functions
0001562 .rel.text
0001574 .data
0001602 .bss
0001607 .note
0001615 .comment
0003071 sfun_atmos_for.for
0003101 gcc2_compiled.
0003120 rearth.0
0003131 gmr.1
0003137 htab.2
0003146 ttab.3
0003155 ptab.4
0003164 gtab.5
0003173 atmos_
0003207 exp
0003213 pow_d
Note that Atmos has been changed to atmos_, which the C program must
call to be successful.
With Compaq Visual Fortran and Intel Visual Fortran on 32-bit Windows
machines, the symbol is suppressed, so that Atmos becomes ATMOS (no
underscore).
Fortran Math Library
Fortran math library symbols might not match C math library symbols.
For example, A^B in Fortran calls library function pow_dd, which is not in
the C math library. In these cases, you must tell mex to link in the Fortran
math library. For gcc environments, these routines are usually found in
/usr/local/lib/libf2c.a, /usr/lib/libf2c.a, or equivalent.
The mex command becomes
mex -L/usr/local/lib -lf2c cmex_c_file fortran_object_file
6-11
6 Creating Fortran S-Functions
Note On UNIX, the -lf2c option follows the conventional UNIX library
linking syntax, where -l is the library option itself and f2c is the unique part
of the library files name, libf2c.a. Be sure to use the -L option for the library
search path, because -I is only followed while searching for include files.
The f2c package can be obtained for Windows and UNIX environments from
the Internet. The file libf2c.a is usually part of g77 distributions, or else the
file is not needed as the symbols match. In obscure cases, it must be installed
separately, but even this is not difficult once the need for it is identified.
On 32-bit Windows machines, using Microsoft Visual C/C++ and Compaq
Visual Fortran 6.0 (formerly known as Digital Fortran), this example can
be compiled using the following mex commands (each command is on one
line and matlabroot should be replaced with the path to the MATLAB root
directory. Note that mex -setup must be run to return to the C compiler
before executing the second command. DF_ROOT is the name of the systems
environment variable that points to the Compaq Visual Fortran root directory
and may vary on different computers.)
mex -v COMPFLAGS#"$COMPFLAGS /iface:cref" -c sfun_atmos_sub.F
-f matlabroot\bin\win32\mexopts\cvf66opts.bat
!mex -v LINKFLAGS#"$LINKFLAGS dformd.lib dfconsol.lib dfport.lib
/LIBPATH:$DF_ROOT\DF98\LIB" sfun_atmos.c sfun_atmos_sub.obj
On 32-bit Windows machines, using Microsoft Visual C/C++ and Intel
Visual
Fortran 9.0 (formerly known as Compaq Visual Fortran), this example can be
compiled using the following mex commands (each command is on one line).
mex -v -c sfun_atmos_sub.F -f ..\..\bin\win32\mexopts\
intelf90opts.bat
!mex -v -L"%IFORT_COMPILER90%\IA32\LIB" -llibifcoremd
-lifconsol -lifportmd -llibmmd -llibirc sfun_atmos.c
sfun_atmos_sub.obj
On 64-bit Windows machines, using Microsoft Visual C/C++ and Intel
Visual
Fortran 9.0 (formerly known as Compaq Visual Fortran), this example can be
compiled using the following mex commands (each command is on one line).
mex -v -c sfun_atmos_sub.F -f ..\..\bin\win64\mexopts\
6-12
Creating Level 2 Fortran S-Functions
intelf90opts.bat
!mex -v -L"%IFORT_COMPILER90%\EM64T\LIB" -llibifcoremd
-lifconsol -lifportmd -llibmmd -llibirc sfun_atmos.c
sfun_atmos_sub.obj
CFortran
Or you can try using CFortran to create an interface. CFortran is a tool for
automated interface generation between C and Fortran modules, in either
direction. Search the Web for cfortran or visit
http://www-zeus.desy.de/~burow/cfortran/
for downloading.
Obtaining a Fortran Compiler
On Windows, using Visual C/C++ with Fortran is best done with Intel
Visual Fortran, Compaq Visual Fortran, Absoft, Lahey, or other third-party
compilers. See Intel (www.intel.com) for Windows and Linux compilers, see
Absoft (www.absoft.com) for Windows, Linux, and Sun compilers, and see
Lahey (www.lahey.com) for more choices in Windows Fortran compilers.
For Sun (Solaris) and other commercial UNIX platforms, you can purchase
the computer vendors Fortran compiler, a third-party Fortran such as Absoft,
or even use the Gnu Fortran port for that platform (if available).
As long as the compiler can output the same object (.o) format as the
platforms C compiler, the Fortran compiler will work with the gateway C
MEX S-function technique.
Gnu Fortran (g77) can be obtained free for several platforms from many
download sites, including tap://www.redhat.com in the download area. A
useful keyword on search engines is g77.
Constructing the Gateway
The mdlInitializeSizes() and mdlInitializeSampleTimes() methods are
coded in C. It is unlikely that you will need to call Fortran routines from
6-13
6 Creating Fortran S-Functions
these S-function methods. In the simplest case, the Fortran is called only
from mdlOutputs().
Simple Case
The Fortran code must at least be callable in one-step-at-a-time fashion. If
the code doesnt have any states, it can be called from mdlOutputs() and no
mdlDerivatives() or mdlUpdate() method is required.
Code with States
If the code has states, you must decide whether the Fortran code can support
a variable-step solver or not. For fixed-step solver only support, the C gateway
consists of a call to the Fortran code from mdlUpdate(), and outputs are
cached in an S-function DWork vector so that subsequent calls by Simulink
into mdlOutputs() will work properly and the Fortran code wont be called
until the next invocation of mdlUpdate(). In this case, the states in the code
can be stored however you like, typically in the work vector or as discrete
states in Simulink.
If instead the code needs to have continuous time states with support for
variable-step solvers, the states must be registered and stored with Simulink
as doubles. You do this in mdlInitializeSizes() (registering states), then
the states are retrieved and sent to the Fortran code whenever you need to
execute it. In addition, the main body of code has to be separable into a call
form that can be used by mdlDerivatives() to get derivatives for the state
integration and also by the mdlOutputs() and mdlUpdate() methods as
appropriate.
Setup Code
If there is a lengthy setup calculation, it is best to make this part of the code
separable from the one-step-at-a-time code and call it from mdlStart().
This can either be a separate SUBROUTINE called from mdlStart() that
communicates with the rest of the code through COMMON blocks or argument
I/O, or it can be part of the same piece of Fortran code that is isolated by an
IF-THEN-ELSE construct. This construct can be triggered by one of the input
arguments that tells the code if it is to perform either the setup calculations
or the one-step calculations.
6-14
Creating Level 2 Fortran S-Functions
SUBROUTINE Versus PROGRAM
To be able to call Fortran from Simulink directly without having to launch
processes, etc., you must convert a Fortran PROGRAM into a SUBROUTINE. This
consists of three steps. The first is trivial; the second and third can take
a bit of examination.
1 Change the line PROGRAM to SUBROUTINE subName.
Now you can call it from C using C function syntax.
2 Identify variables that need to be inputs and outputs and put them in the
SUBROUTINE argument list or in a COMMON block.
It is customary to strip out all hard-coded cases and output dumps. In
the Simulink environment, you want to convert inputs and outputs into
block I/O.
3 If you are converting a stand-alone simulation to work inside Simulink,
identify the main loop of time integration and remove the loop and, if you
want Simulink to integrate continuous states, remove any time integration
code. Leave time integrations in the code if you intend to make a discrete
time (sampled) S-function.
Arguments to a SUBROUTINE
Most Fortran compilers generate SUBROUTINE code that passes arguments by
reference. This means that the C code calling the Fortran code must use
only pointers in the argument list.
PROGRAM ...
becomes
SUBROUTINE somename( U, X, Y )
A SUBROUTINE never has a return value. You manage I/O by using some of the
arguments for input, the rest for output.
6-15
6 Creating Fortran S-Functions
Arguments to a FUNCTION
A FUNCTION has a scalar return value passed by value, so a calling C program
should expect this. The argument list is passed by reference (i.e., pointers)
as in the SUBROUTINE.
If the result of a calculation is an array, then you should use a subroutine, as
a FUNCTION cannot return an array.
Interfacing to COMMON Blocks
While there are several ways for Fortran COMMON blocks to be visible to C code,
it is often recommended to use an input/output argument list to a SUBROUTINE
or FUNCTION. If the Fortran code has already been written and uses COMMON
blocks, it is a simple matter to write a small SUBROUTINE that has an
input/output argument list and copies data into and out of the COMMON block.
The procedure for copying in and out of the COMMON block begins with a write
of the inputs to the COMMON block before calling the existing SUBROUTINE. The
SUBROUTINE is called, then the output values are read out of the COMMON block
and copied into the output variables just before returning.
Example C MEX S-Function Calling Fortran Code
The S-function demo sfcndemo_atmos.mdl contains an example of a C MEX
S-function calling a Fortran subroutine. The Fortran subroutine Atmos is
in the file matlabroot/simulink/src/sfun_atmos_sub.F. This subroutine
calculates the standard atmosphere up to 86 kilometers. The subroutine
has four arguments.
SUBROUTINE Atmos(alt, sigma, delta, theta)
The gateway C MEX S-function, matlabroot/simulink/src/sfun_atmos.c,
declares the Fortran subroutine.
/*
* Windows uses upper case for Fortran external symbols
*/
#ifdef _WIN32
#define atmos_ ATMOS
#endif
6-16
Creating Level 2 Fortran S-Functions
extern void atmos_(float *alt,
float *sigma,
float *delta,
float *theta);
The mdlOutputs method calls the Fortran subroutine using pass-by-reference
for the arguments.
/* call the Fortran routine using pass-by-reference */
atmos_(&falt, &fsigma, &fdelta, &ftheta);
To see this example working in the sample model sfcndemo_atmos.mdl, enter
the following command at the MATLAB prompt.
sfcndemo_atmos
Building Gateway C MEX S-Functions on a Windows System
On 32-bit Windows systems using Microsoft Visual C/C++ and Compaq Visual
Fortran 6.6., you need to use separate commands to compile the Fortran file
and then link it to the C gateway file. Each command is on one line.
1 Run mex -setup and select a Fortran compiler.
2 Compile the Fortran file using the following command.
mex -v COMPFLAGS#"$COMPFLAGS /iface:cref" -c
sfun_atmos_sub.F -f matlabroot\bin\win32\mexopts\cvf66opts.bat
3 Rerun mex -setup and select a C compiler.
4 Link the compiled Fortran subroutine to the gateway C MEX S-function
using the following command. DF_ROOT is the name of the systems
environment variable that points to the Compaq Visual Fortran root
directory and may vary on different systems.
!mex -v LINKFLAGS#"$LINKFLAGS dformd.lib dfconsol.lib
dfport.lib/LIBPATH:$DF_ROOT\DF98\LIB" sfun_atmos.c
sfun_atmos_sub.obj
6-17
6 Creating Fortran S-Functions
If the linker finds multiple C libraries, you might need to add the option
/NODEFAULTLIB:libc.lib to the command to avoid an error. For example:
!mex -v /NODEFAULTLIB:libc.lib LINKFLAGS#"$LINKFLAGS
dformd.lib dfconsol.lib dfport.lib /LIBPATH:$DF_ROOT\DF98\LIB"
sfun_atmos.c sfun_atmos_sub.obj.
Building Gateway C MEX S-Functions on a UNIX System
Build the gateway on UNIX using the command
mex sfun_atmos.c sfun_atmos_sub.o
On some UNIX systems where the C and Fortran compilers were installed
separately (or are not aware of each other), you might need to reference the
library libf2c.a. To do this, use the -lf2c flag.
If the libf2c.a library is not on the library path, you need to add the path to
the mex process explicitly with the -L command. For example:
mex -L/usr/local/lib/ -lf2c sfun_atmos.c sfun_atmos_sub.o
6-18
Porting Legacy Code
Porting Legacy Code
In this section...
Find the States on page 6-19
Sample Times on page 6-20
Multiple Instances on page 6-20
Use Flints if Needed on page 6-20
Considerations for Real Time on page 6-20
Find the States
If a variable-step solver is being used, it is critical that all continuous
states are identified in the code and put into the Simulink state vector for
integration instead of being integrated by the Fortran code. Likewise, all
derivative calculations must be made available separately to be called from
the mdlDerivatives() method in the S-function. Without these steps, any
Fortran code with continuous states will not be compatible with variable-step
solvers if the S-function is registered as a continuous block with continuous
states.
Telltale signs of implicit advancement are incremented variables such as
M=M+1 or X=X+0.05. If the code has many of these constructs and you
determine that it is impractical to recode the source so as not to ratchet
forward, you might need to try another approach using fixed-step solvers.
If it is impractical to find all the implicit states and to separate out the
derivative calculations for Simulink, another approach can be used, but
you are limited to using fixed-step solvers. The technique here is to call
the Fortran code from the mdlUpdate() method so the Fortran code is only
executed once per Simulink major integration step. Any block outputs must
be cached in a work vector so that mdlOutputs() can be called as often
as needed and output the values from the work vector instead of calling
the Fortran routine again (causing it to inadvertently advance time). See
matlabroot/simulink/src/sfuntmpl_gate_fortran.c for an example that
uses DWork vectors.
6-19
6 Creating Fortran S-Functions
Sample Times
If the code has an implicit step size in its algorithm, coefficients,
etc., ensure that you register the proper discrete sample time in the
mdlInitializeSampleTimes() S-function method and only change the blocks
output values from the mdlUpdate() method.
Multiple Instances
If you plan to have multiple copies of this S-function used in one
Simulink model, you need to allocate storage for each copy of the
S-function in the model. The recommended approach is to use
DWork vectors. See matlabroot/simulink/include/simstruc.h and
matlabroot/simulink/src/sfuntmpl_doc.c for details on allocating
data-typed work vectors.
Use Flints if Needed
Use flints (floating-point ints) to keep track of time. Flints (for IEEE-754
floating-point numerics) have the useful property of not accumulating
roundoff error when adding and subtracting flints. Using flint variables
in DOUBLE PRECISION storage (with integer values) avoids roundoff error
accumulation that would accumulate when floating-point numbers are added
together thousands of times.
DOUBLE PRECISION F
:
:
F = F + 1.0
TIME = 0.003 * F
This technique avoids a common pitfall in simulations.
Considerations for Real Time
Since very few Fortran applications are used in a real-time environment, it is
common to come across simulation code that is incompatible with a real-time
environment. Common failures include unbounded (or large) iterations and
sporadic but time-intensive side calculations. You must deal with these
directly if you expect to run in real time.
6-20
Porting Legacy Code
Conversely, it is still perfectly good practice to have iterative or sporadic
calculations if the generated code is not being used for a real-time application.
6-21
6 Creating Fortran S-Functions
6-22
7
Implementing Block
Features
Dialog Parameters (p. 7-2) How to process parameters passed
via the S-function blocks dialog box.
Run-Time Parameters (p. 7-7) How to create and use run-time
parameters.
Creating Input and Output Ports
(p. 7-16)
How to create input and output ports
on a block.
Custom Data Types (p. 7-24) How to create custom data types for
the values of a blocks signals and
parameters.
Sample Times (p. 7-26) How to specify the rate or rates at
which your block operates.
Work Vectors (p. 7-42) How to create and use work vectors.
Function-Call Subsystems (p. 7-50) How to create a function-call
subsystem.
Sim Viewing Devices in External
Mode (p. 7-55)
How to create a sim viewing device
for use in external mode.
Processing Frame-Based Signals
(p. 7-56)
How to create an S-function that
process frame-based signals.
Handling Errors (p. 7-59) How to handle errors in an
S-function.
S-Function Examples (p. 7-63) Examples of S-functions.
7 Implementing Block Features
Dialog Parameters
In this section...
About Dialog Parameters on page 7-2
Tunable Parameters on page 7-4
About Dialog Parameters
A user can pass parameters to an S-function at the start of and, optionally,
during the simulation, using the S-Function parameters field of the
blocks dialog box. Such parameters are called dialog box parameters to
distinguish them from run-time parameters created by the S-function to
facilitate code generation (see Run-Time Parameters on page 7-7). Simulink
stores the values of the dialog box parameters in the S-functions SimStruct
structure. Simulink provides callback methods and SimStruct macros that
allow the S-function to access and check the parameters and use them in
the computation of the blocks output.
If you want your S-function to be able to use dialog parameters, you must
perform the following steps when you create the S-function:
1 Determine the order in which the parameters are to be specified in the
blocks dialog box.
2 Access these input arguments in the S-function using the ssGetSFcnParam
macro.
Specify S as the first argument and the relative position of the parameter
in the list entered on the dialog box (0 is the first position) as the second
argument. The ssGetSFcnParam macro returns a pointer to the mxArray
containing the parameter. You can use ssGetDTypeIdFromMxArray to get the
data type of the parameter.
For example, in matlabroot/simulink/src/sfun_runtime1.c, the
following #define statements at the beginning of the S-function specify
the order of three dialog box parameters and access their values on the
blocks dialog.
#define SIGNS_IDX 0
7-2
Dialog Parameters
#define SIGNS_PARAM(S) ssGetSFcnParam(S,SIGNS_IDX) /* First parameter */
#define GAIN_IDX 1
#define GAIN_PARAM(S) ssGetSFcnParam(S,GAIN_IDX) /* Second parameter */
#define OUT_IDX 2
#define OUT_PARAM(S) ssGetSFcnParam(S,OUT_IDX) /* Third parameter */
3 In the mdlInitializeSizes function, use the ssSetNumSFcnParams macro
to tell Simulink how many parameters the S-function accepts. Specify
S as the first argument and the number of parameters you are defining
interactively as the second argument. If your S-function implements the
mdlCheckParameters method, the mdlInitializeSizes routine should
call mdlCheckParameters to check the validity of the initial values of
the parameters. For example, the mdlInitializeSizes function in
sfun_runtime1.c begins with the following code.
ssSetNumSFcnParams(S, NPARAMS); /* Number of expected parameters */
#if defined(MATLAB_MEX_FILE)
if (ssGetNumSFcnParams(S) == ssGetSFcnParamsCount(S)) {
mdlCheckParameters(S);
if (ssGetErrorStatus(S) != NULL) {
return;
}
} else {
return; /* Parameter mismatch will be reported by Simulink */
}
#endif
When running a simulation, the user must specify the parameters in the
S-Function parameters field of the blocks dialog box in the same order that
you defined them in step 1. The user can enter any valid MATLAB expression
as the value of a parameter, including literal values, names of workspace
variables, function invocations, or arithmetic expressions. Simulink evaluates
the expression and passes its value to the S-function.
7-3
7 Implementing Block Features
Note You cannot use the Model Explorer, the S-Function block dialog box,
or a mask to tune the parameters of a source S-function, i.e., an S-function
that has outputs but no inputs, while a simulation is running. See Changing
Source Block Parameters During Simulation for more information.
As another example, the following code is part of a device driver S-function.
Four input parameters are used: BASE_ADDRESS_PRM, GAIN_RANGE_PRM,
PROG_GAIN_PRM, and NUM_OF_CHANNELS_PRM. The code uses #define
statements at the top of the S-function to associate particular input arguments
with the parameter names.
/* Input Parameters */
#define BASE_ADDRESS_PRM(S) ssGetSFcnParam(S, 0)
#define GAIN_RANGE_PRM(S) ssGetSFcnParam(S, 1)
#define PROG_GAIN_PRM(S) ssGetSFcnParam(S, 2)
#define NUM_OF_CHANNELS_PRM(S) ssGetSFcnParam(S, 3)
When running the simulation, a user enters four variable names or values
in the S-Function parameters field of the blocks dialog box. The first
corresponds to the first expected parameter, BASE_ADDRESS_PRM(S). The
second corresponds to the next expected parameter, and so on.
The mdlInitializeSizes function contains this statement.
ssSetNumSFcnParams(S, 4);
Tunable Parameters
Dialog parameters can be either tunable or nontunable. A tunable parameter
is a parameter that a user can change while the simulation is running. Use
the macro ssSetSFcnParamTunable in mdlInitializeSizes to specify the
tunability of each dialog parameter used by the macro.
7-4
Dialog Parameters
Note Dialog box parameters are tunable by default. Nevertheless, it is good
programming practice to set the tunability of every parameter, even those
that are tunable. If the user enables the simulation diagnostic S-function
upgrade needed, Simulink issues the diagnostic whenever it encounters an
S-function that fails to specify the tunability of all its parameters.
The mdlCheckParameters method enables you to validate changes to
tunable parameters during a simulation run. Simulink invokes the
mdlCheckParameters method whenever a user changes the values of
parameters during the simulation loop. This method should check the
S-functions dialog parameters to ensure that the changes are valid.
Note The S-functions mdlInitializeSizes routine should also invoke
the mdlCheckParameters method to ensure that the initial values of the
parameters are valid.
The example code below is taken from the mdlInitializeSizes function
found in the example matlabroot/simulink/src/sfun_runtime1.c. The
code first sets the number of S-function dialog box parameters to three before
invoking mdlCheckParameters. If the parameter check passes, the tunability
of the three S-function dialog box parameters is specified.
ssSetNumSFcnParams(S, 3); /* Three dialog box parameters*/
#if defined(MATLAB_MEX_FILE)
if (ssGetNumSFcnParams(S) == ssGetSFcnParamsCount(S)) {
mdlCheckParameters(S);
if (ssGetErrorStatus(S) != NULL) {
return;
}
} else {
return; /* Parameter mismatch will be reported by Simulink */
}
#endif
ssSetSFcnParamTunable(S,GAIN_IDX,true); /* Tunable */
7-5
7 Implementing Block Features
ssSetSFcnParamTunable(S,SIGNS_IDX,false); /* Not tunable */
ssSetSFcnParamTunable(S,OUT_IDX,false); /* Not tunable */
The optional mdlProcessParameters callback method allows an S-function
to process changes to tunable parameters. Simulink invokes this method
only if valid parameter changes have occurred in the previous time step.
A typical use of this method is to perform computations that depend only
on the values of parameters and hence need to be computed only when
parameter values change. The method can cache the results of the parameter
computations in work vectors or, preferably, as run-time parameters (see
Run-Time Parameters on page 7-7).
Tuning Parameters in External Mode
When a user tunes parameters during simulation, Simulink invokes the
S-functions mdlCheckParameters method to validate the changes and then
the S-functions mdlProcessParameters method to give the S-function a
chance to process the parameters in some way. Simulink also invokes these
methods when running in external mode, but it passes the unprocessed
changes on to the S-function target. Thus, if it is essential that your S-function
process parameter changes, you need to create a Target Language Compiler
(TLC) file that inlines the S-function, including its parameter processing code,
during the code generation process. For information on inlining S-functions,
see Inlining S-Functions in the Target Language Compiler Reference Guide.
7-6
Run-Time Parameters
Run-Time Parameters
In this section...
About Run-Time Parameters on page 7-7
Creating Run-Time Parameters on page 7-8
Updating Run-Time Parameters on page 7-14
Tuning Runtime Parameters on page 7-15
About Run-Time Parameters
Simulink allows an S-function to create internal representations of external
dialog parameters called run-time parameters. Every run-time parameter
corresponds to one or more dialog parameters and can have the same value
and data type as its corresponding external parameters or a different value
or data type. If a run-time parameter differs in value or data type from its
external counterpart, the dialog parameter is said to have been transformed
to create the run-time parameter. The value of a run-time parameter that
corresponds to multiple dialog parameters is typically a function of the values
of the dialog parameters. Simulink allocates and frees storage for run-time
parameters and provides functions for updating and accessing them, thus
eliminating the need for S-functions to perform these tasks.
Run-time parameters facilitate the following kinds of S-function operations:
Computed parameters
Often the output of a block is a function of the values of several dialog
parameters. For example, suppose a block has two parameters, the volume
and density of some object, and the output of the block is a function of the
input signal and the mass of the object. In this case, the mass can be viewed
as a third internal parameter computed from the two external parameters,
volume and density. An S-function can create a run-time parameter
corresponding to the computed weight, thereby eliminating the need to
provide special case handling for weight in the output computation. See
Creating Run-Time Parameters from Multiple S-Function Parameters
on page 7-10 for more information.
Data type conversions
7-7
7 Implementing Block Features
Often a block needs to change the data type of a dialog parameter to
facilitate internal processing. For example, suppose that the output of
the block is a function of the input and a parameter and the input and
parameter are of different data types. In this case, the S-function can create
a run-time parameter that has the same value as the dialog parameter
but has the data type of the input signal, and use the run-time parameter
in the computation of the output.
Code generation
During code generation, Real-Time Workshop writes all run-time
parameters automatically to the model.rtw file, eliminating the need for
the S-function to perform this task via an mdlRTW method.
The following Simulink model contains three example S-functions that create
run-time parameters:
matlabroot/toolbox/simulink/simdemos/simfeatures/sfcndemo_runtime.mdl
Creating Run-Time Parameters
An S-function can create run-time parameters all at once or one by one.
Creating Run-Time Parameters All at Once
Use the SimStruct function ssRegAllTunableParamsAsRunTimeParams in
mdlSetWorkWidths to create run-time parameters corresponding to all
tunable parameters. This function requires that you pass it an array of
names, one for each run-time parameter. Real-Time Workshop uses this
name as the name of the parameter during code generation. The S-function
matlabroot/simulink/src/sfun_runtime1.c shows how to create run-time
parameters all at once.
Note The first four characters of the names of a blocks run-time parameters
must be unique. If they are not, Simulink signals an error. For example, trying
to register a parameter named param2 triggers an error if a parameter named
param1 already exists. This restriction allows Real-time Workshop to generate
variable names that are unique within a pre-specified number of characters.
7-8
Run-Time Parameters
This approach to creating run-time parameters assumes that there is a
one-to-one correspondence between an S-functions run-time parameters and
its tunable dialog parameters. This might not be the case. For example,
an S-function might want to use a computed parameter whose value is a
function of several dialog parameters. In such cases, the S-function might
need to create the run-time parameters individually. See Creating Run-Time
Parameters from Multiple S-Function Parameters on page 7-10 for an
example.
Creating Run-Time Parameters Individually
To create run-time parameters individually, the S-functions mdlSetWorkWidths
method should
1 Specify the number of run-time parameters it intends to use, using
ssSetNumRunTimeParams.
2 Use ssRegDlgParamAsRunTimeParam to register a run-time parameter
that corresponds to a single dialog parameter, even if there is a data type
transformation, or ssSetRunTimeParamInfo to set the attributes of a
run-time parameter that corresponds to more than one dialog parameter.
The following example uses ssRegDlgParamAsRunTimeParam and is taken
from the S-function matlabroot/simulink/src/sfun_runtime3.c. This
example creates a run-time parameter directly from the dialog parameter and
with the same data type as the first input ports signal.
static void mdlSetWorkWidths(SimStruct *S)
{
/* Get data type of input to use for run-time parameter */
DTypeId dtId = ssGetInputPortDataType(S, 0);
/* Define name of run-time parameter */
const char_T *rtParamName = "Gain";
ssSetNumRunTimeParams(S, 1); /* One run-time parameter */
if (ssGetErrorStatus(S) != NULL) return;
ssRegDlgParamAsRunTimeParam(S, GAIN_IDX, 0, rtParamName, dtId);
}
#endif /* MDL_SET_WORK_WIDTHS */
7-9
7 Implementing Block Features
The next example uses ssSetRunTimeParamInfo and is taken from the
S-function matlabroot/simulink/src/sfun_runtime2.c.
static void mdlSetWorkWidths(SimStruct *S)
{
ssParamRec p; /* Initialize an ssParamRec structure */
int dlgP = GAIN_IDX; /* Index of S-function parameter */
/* Configure run-time parameter information */
p.name = "Gain";
p.nDimensions = 2;
p.dimensions = (int_T *) mxGetDimensions(GAIN_PARAM(S));
p.dataTypeId = SS_DOUBLE;
p.complexSignal = COMPLEX_NO;
p.data = (void *)mxGetPr(GAIN_PARAM(S));
p.dataAttributes = NULL;
p.nDlgParamIndices = 1;
p.dlgParamIndices = &dlgP;
p.transformed = false;
p.outputAsMatrix = false;
/* Set number of run-time parameters */
if (!ssSetNumRunTimeParams(S, 1)) return;
/* Set run-time parameter information */
if (!ssSetRunTimeParamInfo(S, 0, &p)) return;
}
The S-function sfun_runtime2.c defines the parameters GAIN_IDX and
GAIN_PARAM as follows, prior to using these parameters in mdlSetWorkWidths.
#define GAIN_IDX 1
#define GAIN_PARAM(S) ssGetSFcnParam(S,GAIN_IDX)
Creating Run-Time Parameters from Multiple S-Function
Parameters
Use the ssSetRunTimeParamInfo function in mdlSetWorkWidths to create
run-time parameters as a function of multiple S-function parameters. For
example, consider an S-function with two S-function parameters, density and
volume. The S-function inputs a force (F) and outputs an acceleration (a). The
7-10
Run-Time Parameters
mdlOutputs method calculates the force using the equation F=M/a, where the
mass (M) is the product of the density and volume.
The S-function matlabroot/simulink/src/sfun_runtime4.c implements
this example using a single run-time parameter to store the mass. The
S-function begins by defining the run-time parameter data type, as well as
variables associated with volume and density.
#define RUN_TIME_DATA_TYPE SS_DOUBLE
#if RUN_TIME_DATA_TYPE == SS_DOUBLE
typedef real_T RunTimeDataType;
#endif
#define VOL_IDX 0
#define VOL_PARAM(S) ssGetSFcnParam(S,VOL_IDX)
#define DEN_IDX 1
#define DEN_PARAM(S) ssGetSFcnParam(S,DEN_IDX)
The mdlSetWorkWidths method then initializes the run-time parameter, as
follows.
static void mdlSetWorkWidths(SimStruct *S)
{
ssParamRec p; /* Initialize an ssParamRec structure */
int dlg[2]; /* Stores dialog indices */
real_T vol = *mxGetPr(VOL_PARAM(S));
real_T den = *mxGetPr(DEN_PARAM(S));
RunTimeDataType *mass;
/* Initialize dimensions for the run-time parameter as a
* local variable. Simulink makes a copy of this information
* to store in the run-time parameter. */
int_T massDims[2] = {1,1};
/* Allocate memory for the run-time parameter data. The S-function
* owns this memory location. Simulink does not copy the data. */
if ((mass=(RunTimeDataType*)malloc(1)) == NULL) {
ssSetErrorStatus(S,"Memory allocation error");
return;
}
7-11
7 Implementing Block Features
/* Store the pointer to the memory location in the S-function
* userdata. Since the S-function owns this data, it needs to
* free the memory during mdlTerminate */
ssSetUserData(S, (void*)mass);
/* Call a local function to initialize the run-time
* parameter data. Simulink checks that the data is not empty
* so an initial value must be stored. */
calcMass(mass, vol, den);
/* Specify mass as a function of two S-function dialog parameters */
dlg[0] = VOL_IDX;
dlg[1] = DEN_IDX;
/* Configure run-time parameter information. */
p.name = "Mass";
p.nDimensions = 2;
p.dimensions = massDims;
p.dataTypeId = RUN_TIME_DATA_TYPE;
p.complexSignal = COMPLEX_NO;
p.data = mass;
p.dataAttributes = NULL;
p.nDlgParamIndices = 2;
p.dlgParamIndices = &dlg
p.transformed = RTPARAM_TRANSFORMED;
p.outputAsMatrix = false;
/* Set number of run-time parameters */
if (!ssSetNumRunTimeParams(S, 1)) return;
/* Set run-time parameter information */
if (!ssSetRunTimeParamInfo(S,0,&p)) return;
}
The local function calcMass updates the run-time parameter value in
mdlSetWorkWidths and in mdlProcessParameters, when the values of
density or volume are tuned.
7-12
Run-Time Parameters
/* Function: calcMass ==============================================
* Abstract:
* Local function to calculate the mass as a function of volume
* and density.
*/
static void calcMass(RunTimeDataType *mass, real_T vol, real_T den)
{
*mass = vol * den;
}
The mdlOutputs method uses the stored mass to calculate the force.
/* Function: mdlOutputs ==========================================
* Abstract:
*
* Output acceleration calculated as input force divided by mass.
*/
static void mdlOutputs(SimStruct *S, int_T tid)
{
real_T *y1 = ssGetOutputPortRealSignal(S,0);
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
RunTimeDataType *mass =
(RunTimeDataType *)((ssGetRunTimeParamInfo(S,0))->data);
/*
* Output acceleration = force / mass
*/
y1[0] = (*uPtrs[0]) / *mass;
}
Lastly, the mdlTerminate method frees the memory allocated for the run-time
parameter in mdlSetWorkWidths.
/* Function: mdlTerminate ==========================================
* Abstract:
* Free the user data.
*/
static void mdlTerminate(SimStruct *S)
{
/* Free memory used to store the run-time parameter data*/
7-13
7 Implementing Block Features
RunTimeDataType *mass = ssGetUserData(S);
if (mass != NULL) {
free(mass);
}
}
To run the example, open the Simulink model:
matlabroot/toolbox/simulink/simdemos/simfeatures/sfcndemo_runtime.mdl
Updating Run-Time Parameters
Whenever a user changes the values of an S-functions dialog
parameters during a simulation run, Simulink invokes the S-functions
mdlCheckParameters method to validate the changes. If the changes are valid,
Simulink invokes the S-functions mdlProcessParameters method at the
beginning of the next time step. This method should update the S-functions
run-time parameters to reflect the changes in the dialog parameters.
Updating All Parameters at Once
If there is a one-to-one correspondence between the S-functions tunable dialog
parameters and the run-time parameters, i.e., the run-time parameters were
registered using ssRegAllTunableParamsAsRunTimeParams, the S-function
can use the SimStruct function ssUpdateAllTunableParamsAsRunTimeParams
to accomplish this task. This function updates each run-time parameter
to have the same value as the corresponding dialog parameter. See
matlabroot/simulink/src/sfun_runtime1.c for an example.
Updating Parameters Individually
If there is not a one-to-one correspondence between the S-functions dialog and
run-time parameters or the run-time parameters are transformed versions of
the dialog parameters, the mdlProcessParameters method must update each
parameter individually. The method used to update the run-time parameter
is chosen based on how it was registered.
If a run-time parameter was registered using ssSetRunTimeParamInfo,
the mdlProcessParameters method uses ssUpdateRunTimeParamData
to update the run-time parameter, as shown in
matlabroot/simulink/src/sfun_runtime2.c. This function
7-14
Run-Time Parameters
updates the data field in the parameters attributes record, ssParamRec, with
a new value. Note that Simulink does not allow you to directly modify the
ssParamRec, even though you can obtain a pointer to the ssParamRec using
ssGetRunTimeParamInfo.
If the run-time parameter was registered using
ssRegDlgParamAsRunTimeParam, the mdlProcessParameters
method can use ssUpdateDlgParamAsRunTimeParam to update the run-time
parameter, as is shown in matlabroot/simulink/src/sfun_runtime3.c.
Updating Parameters as Functions of Multiple S-Function
Parameters
If the run-time parameter was registered as a function of multiple
S-function parameters, the mdlProcessParameters method uses
ssUpdateRunTimeParamData to update the run-time parameter.
The S-function matlabroot/simulink/src/sfun_runtime4.c provides an
example. In the example, the mdlProcessParameters method calculates
a new value for the run-time parameter and updates the run-time
parameters memory location allocated during the call to mdlSetWorkWidths.
The mdlProcessParameters method then passes the updated run-time
parameters pointer to ssUpdateRunTimeParamData.
Tuning Runtime Parameters
Tuning a dialog parameter tunes the corresponding runtime parameter
during simulation and in code generated from the model only if the dialog
parameter meets the following conditions:
The S-function marks the dialog parameter tunable, using
ssSetSFcnParamTunable.
The dialog parameter is a MATLAB array of values of the standard data
types supported by Simulink.
Note that you cannot tune a runtime parameter whose value is a cell array
or structure.
7-15
7 Implementing Block Features
Creating Input and Output Ports
In this section...
Creating Input Ports on page 7-16
Creating Output Ports on page 7-20
Scalar Expansion of Inputs on page 7-21
Masked Multiport S-Functions on page 7-23
Creating Input Ports
To create and configure input ports, the mdlInitializeSizes method
should first specify the number of input ports that the S-function has, using
ssSetNumInputPorts. Then, for each input port, the method should specify
The dimensions of the input port (see Initializing Input Port Dimensions
on page 7-17)
If you want your S-function to inherit its dimensionality from the port
to which it is connected, you should specify that the port is dynamically
sized in mdlInitializeSizes (see Sizing an Input Port Dynamically on
page 7-18).
Whether the input port allows scalar expansion of inputs (see Scalar
Expansion of Inputs on page 7-21)
Whether the input port has direct feedthrough, using
ssSetInputPortDirectFeedThrough
A port has direct feedthrough if the input is used in either the mdlOutputs
or mdlGetTimeOfNextVarHit functions. The direct feedthrough flag for
each input port can be set to either 1=yes or 0=no. It should be set to 1
if the input, u, is used in the mdlOutputs or mdlGetTimeOfNextVarHit
routine. Setting the direct feedthrough flag to 0 tells Simulink that u
is not used in either of these S-function routines. Violating this leads to
unpredictable results.
The data type of the input port, if not the default double
Use ssSetInputPortDataType to set the input ports data type. If you want
the data type of the port to depend on the data type of the port to which
7-16
Creating Input and Output Ports
it is connected, specify the data type as DYNAMICALLY_TYPED. In this case,
you must provide implementations of the mdlSetInputPortDataType and
mdlSetDefaultPortDataTypes methods to enable the data type to be set
correctly during signal propagation.
The numeric type of the input port, if the port accepts complex-valued
signals
Use ssSetInputPortComplexSignal to set the input ports numeric type.
If you want the numeric type of the port to depend on the numeric
type of the port to which it is connected, specify the numeric type as
inherited. In this case, you must provide implementations of the
mdlSetInputPortComplexSignal and mdlSetDefaultPortComplexSignals
methods to enable the numeric type to be set correctly during signal
propagation.
You can configure additional input port properties using other S-function
macros. See Input and Output Ports on page 9-6 in the SimStruct Macros
and Functions Listed by Usage section for more information.
Note The mdlInitializeSizes method must specify the number of ports
before setting any properties. If it attempts to set a property of a port that
doesnt exist, it is accessing invalid memory and a segmentation violation
occurs.
Initializing Input Port Dimensions
The following options exist for setting the input port dimensions:
If the input signal must be one-dimensional and the input port width
is w, use
ssSetInputPortWidth(S, inputPortIdx, w)
If the input signal must be a matrix of dimension m-by-n, use
ssSetInputPortMatrixDimensions(S, inputPortIdx, m, n)
Otherwise, if the input signal can have either one or two dimensions, use
7-17
7 Implementing Block Features
ssSetInputPortDimensionInfo(S, inputPortIdx, dimsInfo)
You can use this function to fully or partially initialize the port dimensions
(see next section).
Sizing an Input Port Dynamically
If your S-function does not require that an input signal have a specific
dimensionality, you might want to set the dimensionality of the input port to
match the dimensionality of the signal connected to the port. To dimension
an input port dynamically, your S-function should
Specify some or all of the dimensions of the input port as dynamically sized
in mdlInitializeSizes.
If the input port can accept a signal of any dimensionality, use
ssSetInputPortDimensionInfo(S, inputPortIdx, DYNAMIC_DIMENSION)
to set the dimensionality of the input port.
If the input port can accept only vector (1-D) signals but the signals can be
of any size, use
ssSetInputPortWidth(S, inputPortIdx, DYNAMICALLY_SIZED)
to specify the dimensionality of the input port.
If the input port can accept only matrix signals but can accept any row or
column size, use
ssSetInputPortMatrixDimensions(S, inputPortIdx, m, n)
where m and/or n are DYNAMICALLY_SIZED.
Provide an mdlSetInputPortDimensionInfo method that sets the dimensions
of the input port to the size of the signal connected to it.
Simulink invokes this method during signal propagation when it has
determined the dimensionality of the signal connected to the input port.
Provide an mdlSetDefaultPortDimensionInfo method that
sets the dimensions of the blocks ports to a default value. See
7-18
Creating Input and Output Ports
matlabroot/simulink/src/sfun_dynsize.c for an example that
implements this macro.
Simulink invokes this method during signal propagation when it cannot
determine the dimensionality of the signal connected to some or all of
the blocks input ports. This can happen, for example, if an input port is
unconnected. If the S-function does not provide this method, Simulink sets
the dimension of the blocks ports to 1-D scalar.
Example: Defining S-Function Input Ports
The following code in mdlInitializeSizes configures an S-function with
one input port. See Input and Output Ports on page 9-6 in the SimStruct
Macros and Functions Listed by Usage section for more information on the
macros used in this example.
if (!ssSetNumInputPorts(S, 1)) return;
/* Input has direct feedthrough */
ssSetInputPortDirectFeedThrough(S, 0, 1);
/* Input supports frames: Requires Signal Processing Blockset */
ssSetInputPortFrameData(S, 0, FRAME_YES);
/* Input is a real signal */
ssSetInputPortComplexSignal(S, 0, COMPLEX_NO);
/* Input is a dynamically sized 2-D matrix */
ssSetInputPortMatrixDimensions(S ,0,
DYNAMICALLY_SIZED, DYNAMICALLY_SIZED);
/* Input inherits its sample time */
ssSetInputPortSampleTime(S, 0,INHERITED_SAMPLE_TIME);
/* Input signal must be contiguous */
ssSetInputPortRequiredContiguous(S, 0, 1);
/* The input port cannot share memory */
ssSetInputPortOverWritable(S, 0, 0);
7-19
7 Implementing Block Features
During signal propagation, Simulink calls this S-functions
mdlSetInputPortDimensionInfo macro to initialize the input port
dimensions. In this example, mdlSetInputPortDimensionInfo sets the input
dimensions to the candidate dimensions passed to the macro by Simulink.
#if defined(MATLAB_MEX_FILE)
#define MDL_SET_INPUT_PORT_DIMENSION_INFO
static void mdlSetInputPortDimensionInfo(SimStruct *S,
int_T port,
const DimsInfo_T *dimsInfo)
{
if(!ssSetInputPortDimensionInfo(S, port, dimsInfo)) return;
}
#endif
Creating Output Ports
To create and configure output ports, the mdlInitializeSizes method
should first specify the number of output ports that the S-function has, using
ssSetNumOutputPorts. Then, for each output port, the method should specify
Dimensions of the output port
Simulink provides the following macros for setting the ports dimensions.
- ssSetOutputPortDimensionInfo
- ssSetOutputPortMatrixDimensions
- ssSetOutputPortVectorDimension
- ssSetOutputPortWidth
If you want the ports dimensions to depend on block connectivity, set the
dimensions to DYNAMICALLY_SIZED. The S-function must then provide
mdlSetOutputPortDimensionInfo and mdlSetDefaultPortDimensionInfo
methods to ensure that output port dimensions are set to the correct
values in code generation. For more detail on how to set up output port
dimensions, see Initializing Input Port Dimensions on page 7-17. The
process you use to set up output ports is identical to the process shown in
that section for initializing and dimensioning input ports, but using macros
appropriate to output ports.
Data type of the output port
7-20
Creating Input and Output Ports
Use ssSetOutputPortDataType to set the output ports data type. If
you want the data type of the port to depend on block connectivity,
specify the data type as DYNAMICALLY_TYPED. In this case, you
must provide implementations of the mdlSetOutputPortDataType and
mdlSetDefaultPortDataTypes methods to enable the data type to be set
correctly during signal propagation.
The numeric type of the output port, if the port outputs complex-valued
signals
Use ssSetOutputPortComplexSignal to set the output ports numeric
type. If you want the numeric type of the port to depend on the numeric
type of the port to which it is connected, specify the numeric type as
inherited. In this case, you must provide implementations of the
mdlSetOutputPortComplexSignal and mdlSetDefaultPortComplexSignals
methods to enable the numeric type to be set correctly during signal
propagation.
See Creating Input Ports on page 7-16 for an example showing how to
initialize an S-function input port. You use the same procedure to initialize
the S-function output ports, but with the corresponding output port macro.
Scalar Expansion of Inputs
Scalar expansion of inputs refers conceptually to the process of expanding
scalar input signals to the same dimensions as wide input signals connected
to other S-function input ports. This is done by setting each element of
the expanded signal to the value of the scalar input. An S-functions
mdlInitializeSizes method can enable scalar expansion of inputs by
setting the SS_OPTION_ALLOW_INPUT_SCALAR_EXPANSION option, using
ssSetOptions.
With scalar expansion on, the S-functions mdlInitializeSizes method
should specify that the input and output ports are dynamically sized.
Simulink will use a default method to set the dimensions of the input and
output ports. If the block has more than two inputs, the input signals can be
scalar or wide signals, where the wide signals all have the same number of
elements. In this case, Simulink sets the dimensions of the output ports to the
width of the wide input signals and expands the scalar inputs to this width. If
the wide inputs are driven by 1-D and 2-D vectors, the output is a 2-D vector
signal, and the scalar inputs are expanded to a 2-D vector signal.
7-21
7 Implementing Block Features
If scalar expansion is not on, Simulink assumes that all ports (input and
output ports) must have the same dimensions, and it sets all port dimensions
to the same dimensions specified by one of the driving blocks.
Note If the S-function specifies or controls the dimensions of its input and
output ports either by initializing the dimensions in mdlInitializeSizes,
using mdlSetInputPortWidth and mdlSetOutputPortWidth, or using
mdlSetInputPortDimensionInfo, mdlSetOutputPortDimensionInfo, and
mdlSetDefaultPortDimensionInfo, Simulink ignores the scalar expansion
option.
The best way to understand how to use scalar expansion is to consider
the example matlabroot/toolbox/simulink/simdemos/simfeatures/-
sfcndemo_sfun_multiport.mdl. This model contains three
S-function blocks, each with multiple input ports. The S-function
matlabroot/simulink/src/sfun_multiport.c used in these blocks
sets the SS_OPTION_ALLOW_INPUT_SCALAR_EXPANSION option in its
mdlInitializeSizes method, allowing scalar expansion of the inputs.
The S-function specifies that its inputs and outputs are dynamically sized.
Therefore, during signal propagation, Simulink sets the width of the input
ports to the width of the signal connected to the port, and the width of the
output ports to the width of any wide input signal. The mdlOutputs method
performs an element-by-element sum on the input signals, expanding any
scalar inputs, as needed.
/* Calculate an element-by-element sum of the input signals.
yWidth is the width of the output signal. */
for (el = 0; el < yWidth; el++) {
int_T port;
real_T sum = 0.0;
for (port = 0; port < nInputPorts; port++) {
/* Get the input signal value */
InputRealPtrsType uPtrs =
ssGetInputPortRealSignalPtrs(S,port);
if (el < ssGetInputPortWidth(S,port)) {
7-22
Creating Input and Output Ports
/* Input is a wide signal. Use specific element */
sum = sum + ((real_T)signs[port] * (*uPtrs[el]));
} else {
/* Use the scalar value to expand the signal */
sum = sum + ((real_T)signs[port] * (*uPtrs[0]));
}
}
}
Masked Multiport S-Functions
If you are developing masked multiport S-function blocks whose number of
ports varies based on some parameter, and if you want to place them in a
Simulink library, you must specify that the mask modifies the appearance of
the block. To do this, execute the command
set_param(blockname,'MaskSelfModifiable','on')
at the MATLAB prompt before saving the library, where blockname is the full
path to the block. Failure to specify that the mask modifies the appearance of
the block means that an instance of the block in a model reverts to the number
of ports in the library whenever you load the model or update the library link.
7-23
7 Implementing Block Features
Custom Data Types
An S-function can accept and output user-defined as well as built-in
Simulink data types. To use a user-defined data type, the S-functions
mdlInitializeSizes routine must
1 Register the data type, using ssRegisterDataType.
2 Specify the amount of memory in bytes required to store an instance of the
data type, using ssSetDataTypeSize.
3 Specify the value that represents zero for the data type, using
ssSetDataTypeZero.
The following code placed at the beginning of mdlInitializeSizes sets the
size and zero representation of a custom data type named myDataType.
/* Define variables */
int_T status;
DTypeId id;
/* Define the structure of the user-defined data type */
typedef struct{
int8_T a;
uint16_T b;
}myStruct;
myStruct tmp;
/* Register the user-defined data types */
id = ssRegisterDataType(S, "myDataType");
if(id == INVALID_DTYPE_ID) return;
/* Set the size of the user-defined data type */
status = ssSetDataTypeSize(S, id, sizeof(tmp));
if(status == 0) return;
/* Set the zero representation */
tmp.a = 0;
tmp.b = 1;
7-24
Custom Data Types
status = ssSetDataTypeZero(S, id, &tmp);
To register a custom data type from a Simulink.AliastType,
Simulink.NumericType, or Simulink.StructType object, the S-functions
mdlInitializeSizes routine must
1 Define an integer pointer to hold the data type identifier for the custom
data type.
2 Register the data type, using ssRegisterTypeFromNamedObject.
For example, the following code placed at the beginning of
mdlInitializeSizes defines a custom data type from a Simulink.AliasType
object named u8. The example then assigns the custom data type to the first
output port.
int id1;
ssRegisterTypeFromNamedObject(S, "u8", &id1);
ssSetOutputPortDataType(S, 0, id1);
In addition, you can use the identifier id1 to assign this data type to
S-function parameters, Dwork vectors, and input ports.
Note You cannot generate Real-Time Workshop code for S-functions that
contain macros to define custom data types. You must use an inlined
S-function that accesses Target Language Compiler functions to generate
code with custom data types. See Inlining S-Functions in the Real-Time
Workshop Target Language Compiler documentation.)
7-25
7 Implementing Block Features
Sample Times
In this section...
About Sample Times on page 7-26
Block-Based Sample Times on page 7-27
Specifying Port-Based Sample Times on page 7-31
Hybrid Block-Based and Port-Based Sample Times on page 7-36
Multirate S-Function Blocks on page 7-37
Synchronizing Multirate S-Function Blocks on page 7-39
Specifying Model Reference Sample Time Inheritance on page 7-40
About Sample Times
This and the following subsections explain how to specify the sample-time
behavior of your function, e.g., whether it inherits its rates from the blocks
that drive it or defines its own rates and, if it defines its own rates, what
the rates are.
An S-function block can specify its rates (i.e., sample times) as
Block-based sample times
Port-based sample times
Hybrid block-based and port-based sample times
With block-based sample times, the S-function specifies a set of operating
rates for the block as a whole during the initialization phase of the simulation.
With port-based sample times, the S-function specifies a sample time for each
input and output port individually during initialization. During the execution
phase, with block-based sample times, the S-function processes all inputs
and outputs each time a sample hit occurs for the block. By contrast, with
port-based sample times, the block processes a particular port only when a
sample hit occurs for that port.
For example, consider two sample rates, 0.5 and 0.25 seconds, respectively:
7-26
Sample Times
In the block-based method, selecting 0.5 and 0.25 would direct the block to
execute inputs and outputs at 0.25 second increments.
In the port-based method, you could set the input port to 0.5 and the output
port to 0.25, and the block would process inputs at 2 Hz and outputs at 4 Hz.
You should use port-based sample times if your application requires unequal
sample rates for input and output execution or if you dont want the overhead
associated with running input and output ports at the highest sample rate
of your block.
In some applications, an S-Function block might need to operate internally
at one or more sample rates while inputting or outputting signals at other
rates. The hybrid block- and port-based method of specifying sample rates
allows you to create such blocks.
In typical applications, you specify only one block-based sample time.
Advanced S-functions might require the specification of port-based or multiple
block sample times.
Block-Based Sample Times
The next two sections discuss how to specify block-based sample times. You
must specify information in
mdlInitializeSizes
mdlInitializeSampleTimes
A third section presents a simple example that shows how to specify
sample times in mdlInitializeSampleTimes. For a detailed example, see
matlabroot/simulink/src/mixedm.c.
Specifying the Number of Sample Times in mdlInitializeSizes
To configure your S-function block for block-based sample times, use
ssSetNumSampleTimes(S,numSampleTimes);
7-27
7 Implementing Block Features
where numSampleTimes > 0. This tells Simulink that your S-function has
block-based sample times. Simulink calls mdlInitializeSampleTimes, which
in turn sets the sample times.
Setting Sample Times and Specifying Function Calls in
mdlInitializeSampleTimes
mdlInitializeSampleTimes specifies two pieces of execution information:
Sample and offset times In mdlInitializeSampleTimes, you must
specify the sampling period and offset for each sample time using
ssSetSampleTime and ssSetOffsetTime. If applicable, you can calculate
the appropriate sampling period and offset prior to setting them, for
example, by computing the best sample time for the block based on the
S-functions dialog parameters obtained using ssGetSFcnParam.
Function calls In mdlInitializeSampleTimes, use
ssSetCallSystemOutput to specify the output elements that are performing
function calls. See matlabroot/simulink/src/sfun_fcncall.c for an
example and Function-Call Subsystems on page 7-50 for an explanation
of this S-function.
You specify the sample times as pairs [sample_time, offset_time], using
these macros
ssSetSampleTime(S, sampleTimePairIndex, sample_time)
ssSetOffsetTime(S, offsetTimePairIndex, offset_time)
where sampleTimePairIndex starts at 0.
The valid sample time pairs are (uppercase values are macros defined in
simstruc.h):
[CONTINUOUS_SAMPLE_TIME, 0.0 ]
[CONTINUOUS_SAMPLE_TIME, FIXED_IN_MINOR_STEP_OFFSET]
[discrete_sample_period, offset ]
[VARIABLE_SAMPLE_TIME , 0.0 ]
Alternatively, you can specify that the sample time is inherited from the
driving block, in which case the S-function can have only one sample time pair,
7-28
Sample Times
[INHERITED_SAMPLE_TIME, 0.0 ]
or
[INHERITED_SAMPLE_TIME, FIXED_IN_MINOR_STEP_OFFSET]
Note If your S-function inherits its sample time, you should specify whether
it is safe to use the S-function in a submodel, i.e., a model referenced by
another model. See Specifying Model Reference Sample Time Inheritance
on page 7-40 for more information.
The following guidelines might help in specifying sample times:
A continuous function that changes during minor integration steps should
register the [CONTINUOUS_SAMPLE_TIME, 0.0] sample time.
A continuous function that does not change during minor
integration steps should register the [CONTINUOUS_SAMPLE_TIME,
FIXED_IN_MINOR_STEP_OFFSET] sample time.
A discrete function that changes at a specified rate should register the
discrete sample time pair
[discrete_sample_period, offset]
where
discrete_sample_period > 0.0
and
0.0 <= offset < discrete_sample_period
A discrete function that changes at a variable rate should register the
variable-step discrete [VARIABLE_SAMPLE_TIME, 0.0] sample time. The
mdlGetTimeOfNextVarHit function is called to get the time of the next
sample hit for the variable-step discrete task. The VARIABLE_SAMPLE_TIME
can be used with variable-step solvers only.
7-29
7 Implementing Block Features
If your function has no intrinsic sample time, you must indicate that it is
inherited according to the following guidelines:
A function that changes as its input changes, even during minor integration
steps, should register the [INHERITED_SAMPLE_TIME, 0.0] sample time.
A function that changes as its input changes, but doesnt change during
minor integration steps (that is, is held during minor steps), should register
the [INHERITED_SAMPLE_TIME, FIXED_IN_MINOR_STEP_OFFSET] sample
time.
To check for a sample hit during execution (in mdlOutputs or mdlUpdate), use
the ssIsSampleHit or ssIsContinuousTask macro. For example, if your
first sample time is continuous, then you use the following code fragment
to check for a sample hit. Note that you get incorrect results if you use
ssIsSampleHit(S,0,tid).
if (ssIsContinuousTask(S,tid)) {
}
If, for example, you wanted to determine whether the third (discrete) task has
a hit, you would use the following code fragment:
if (ssIsSampleHit(S,2,tid) {
}
Example: mdlInitializeSampleTimes
This example specifies that there are two discrete sample times with periods
of 0.01 and 0.5 seconds.
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, 0.01);
ssSetOffsetTime(S, 0, 0.0);
ssSetSampleTime(S, 1, 0.5);
ssSetOffsetTime(S, 1, 0.0);
} /* End of mdlInitializeSampleTimes. */
7-30
Sample Times
Specifying Port-Based Sample Times
If you want your S-function to use port-based sample times, you must
specify the number of sample times as port-based in the S-functions
mdlInitializeSizes method:
ssSetNumSampleTimes(S, PORT_BASED_SAMPLE_TIMES)
You must also specify the sample time of each input and output port in the
S-functions mdlInitializeSizes method, using the following macros
ssSetInputPortSampleTime(S, idx, period)
ssSetInputPortOffsetTime(S, idx, offset)
ssSetOutputPortSampleTime(S, idx, period)
ssSetOutputPortOffsetTime(S, idx, offset)
Note mdlInitializeSizes should not contain any ssSetSampleTime or
ssSetOffsetTime calls when you use port-based sample times.
The call to ssSetNumSampleTimes can be placed before or after the port-based
sample times are actually specified in mdlInitializeSizes. However, if
ssSetNumSampleTimes does not configure the S-function to use port-based
sample times, any sample times set on the ports will be ignored.
For any given port, you can specify
A specific sample time and period
For example, the following code sets the sample time of the S-functions
first input port to every 0.1 s starting with the simulation start time.
ssSetInputPortSampleTime(S, 0, 0.1);
ssSetInputPortOffsetTime(S, 0, 0);
Inherited sample time, i.e., the port inherits its sample time from the
port to which it is connected (see Specifying Inherited Sample Time for
a Port on page 7-32)
Constant sample time, i.e., the ports input or output never changes (see
Specifying Constant Sample Time for a Port on page 7-33)
7-31
7 Implementing Block Features
Note To be usable in a triggered subsystem, all of your S-functions ports
must have either inherited or constant sample time (see Configuring
Port-Based Sample Times for Use in Triggered Subsystems on page 7-34).
Port-based sample times cannot be used with S-functions that have neither
input ports nor output ports. If an S-function uses port-based sample times
and has no ports, the S-function produces errors when the Simulink model
is updated or run. If the number of input or output ports on an S-function is
variable, extra protection should be added into the S-function to ensure the
total number of ports does not go to zero.
To use port-based sample times in a Level-2 M-file S-function, specify the
sample time for each S-function port in the setup method. Use a value of [-1
0] for the SampleTime property of each port.
block.InputPort(1).SampleTime = [-1 0];
block.OutputPort(1).SampleTime = [-1 0];
The setup method should not specify a sample time for the block when using
port-based sample times.
Specifying Inherited Sample Time for a Port
To specify that a ports sample time is inherited, the mdlInitializeSizes
method should set its period to -1 and its offset to 0. For example, the following
code specifies inherited sample time for the S-functions first input port:
ssSetInputPortSampleTime(S, 0, -1);
ssSetInputPortOffsetTime(S, 0, 0);
When you specify port-based sample times, Simulink calls
mdlSetInputPortSampleTime and mdlSetOutputPortSampleTime to
determine the rates of inherited signals.
Once all rates have been determined, Simulink calls
mdlInitializeSampleTimes. Even though there is no need to initialize
port-based sample times at this point, Simulink invokes this method to give
your S-function an opportunity to configure function-call connections. Your
S-function must thus provide an implementation for this method regardless
7-32
Sample Times
of whether it uses port-based sample times or function-call connections.
Although you can provide an empty implementation, you might want to
use it to check the appropriateness of the sample times that the block
inherited during sample time propagation. Use ssGetInputPortSampleTime
and ssGetOutputPortSampleTime in mdlInitializeSampleTimes to obtain
the values of the inherited sample times. For example, the following code in
mdlInitializeSampleTimes checks if the S-functions first input inherited a
continuous sample time.
if (!ssGetInputPortSampleTime(S,0) {
ssSetErrorStatus(S,"Cannot inherit a continuous sample time.");
}
Note If you specify that your S-functions ports inherit their sample time, you
should also specify whether it is safe to use the S-function in a submodel,
i.e., a model referenced by another model. See Specifying Model Reference
Sample Time Inheritance on page 7-40 for more information.
Specifying Constant Sample Time for a Port
If your S-function uses port-based sample times, it can specify that any of
its ports has a constant sample time. This means that the signal entering
or leaving the port never changes from its initial value at the start of the
simulation.
Before specifying constant sample time for an output port whose output
depends on the S-functions parameters, the S-function should use
ssGetInlineParameters to check whether the user has specified the Inline
parameters option on the Optimization pane of the Configuration
parameters dialog box. If the user has not checked this option, it is possible
for the user to change the values the S-functions parameters and hence
its outputs during the simulation. In this case, the S-function should not
specify a constant sample time for any ports whose outputs depend on the
S-functions parameters.
To specify constant sample time for a port, the S-function must perform the
following tasks
7-33
7 Implementing Block Features
Use ssSetOptions to tell Simulink that it supports constant port sample
times in its mdlInitializeSizes method:
ssSetOptions(S, SS_OPTION_ALLOW_CONSTANT_PORT_SAMPLE_TIME);
Note By setting this option, your S-function is in effect telling
Simulink that all of its ports support a constant sample time including
ports that inherit their sample times from other blocks. If any of
the S-functions inherited sample time ports cannot have a constant
sample time, your S-functions mdlSetInputPortSampleTime and
mdlSetOutputPortSampleTime methods must check whether that port
has inherited a constant sample time. If the port has inherited a constant
sample time, your S-function should throw an error.
Set the ports period to inf and its offset to 0, e.g.,
ssSetInputPortSampleTime(S, 0, mxGetInf());
ssSetInputPortOffsetTime(S, 0, 0);
Check in mdlOutputs whether the methods tid argument equals
CONSTANT_TID and if so, set the value of the ports output if it is an output
port.
See sfun_port_constant.c, the source file for the sfcndemo_port_constant
demo, for an example of how to create ports with a constant sample time.
Configuring Port-Based Sample Times for Use in Triggered
Subsystems
To be usable in a triggered subsystem, your port-based sample time S-function
must perform the following tasks.
Use ssSetOptions to tell Simulink in its mdlInitializeSizes method
that it can run in a triggered subsystem:
ssSetOptions(S,
SS_OPTION_ALLOW_PORT_SAMPLE_TIME_IN_TRIGSS);
7-34
Sample Times
Set all of its ports to have either inherited or constant sample time in its
mdlInitializeSizes method.
Handle inheritance of a triggered sample time in
mdlSetInputPortSampleTime and mdlSetOutputPortSampleTime methods
as follows.
Since the S-functions ports inherit their sample times,
Simulink invokes either mdlSetInputPortSampleTime or
mdlSetOutputPortSampleTime during sample time propagation. The
macro ssSampleAndOffsetAreTriggered can be used in these methods
to determine if the S-function resides in a triggered subsystem. If the
S-function does reside in a triggered subsystem, whichever method is called
must set the sample time and offset of the port for which it is called to
INHERITED_SAMPLE_TIME (-1).
Setting a ports sample time and offset both to INHERITED_SAMPLE_TIME
indicates that the sample time of the port is triggered, i.e., it produces an
output or accepts an input only when the subsystem in which it resides is
triggered. The method must then also set the sample times and offsets of
all of the S-functions other input and output ports to have either triggered
or constant sample time, whichever is appropriate, e.g.,
static void mdlSetInputPortSampleTime(SimStruct *S,
int_T portIdx,
real_T sampleTime
real_T offsetTime)
{
/* If the S-function resides in a triggered subsystem,
the sample time and offset passed to this method
are both equal to INHERITED_SAMPLE_TIME. Therefore,
if triggered, the following lines set the sample time
and offset of the input port to INHERITED_SAMPLE_TIME.*/
ssSetInputPortSampleTime(S, portIdx, sampleTime);
ssSetInputPortOffsetTime(S, portIdx, offsetTime);
/* If triggered, set the output port to inherited, as well */
if (ssSampleAndOffsetAreTriggered(sampleTime,offsetTime)) {
ssSetOutputPortSampleTime(S, 0, INHERITED_SAMPLE_TIME);
ssSetOutputPortOffsetTime(S, 0, INHERITED_SAMPLE_TIME);
7-35
7 Implementing Block Features
/* Note, if there are additional input and output ports
on this S-function, they should be set to either
inherited or constant at this point, as well. */
}
}
There is no way for an S-function residing in a triggered subsystem
to predict whether Simulink will call mdlSetInputPortSampleTime or
mdlSetOutputPortSampleTime to set its port sample times. For this
reason, both methods must be able to set the sample times of all ports
correctly so that one of the methods need only be called once.
In mdlUpdate and mdlOutputs, use
ssGetPortBasedSampleTimeBlockIsTriggered to check
whether the S-function resides in a triggered subsystem and if so, use
appropriate algorithms for computing its states and outputs.
See sfun_port_triggered.c, the source file for the
sfcndemo_port_triggered demo, for an example of how to create an
S-function that can be used in a triggered subsystem.
Hybrid Block-Based and Port-Based Sample Times
The hybrid method of assigning sample times combines the block-based and
port-based methods. You first specify, in mdlInitializeSizes, the total
number of rates at which your block operates, including both internal and
input and output rates, using ssSetNumSampleTimes.
You then set the SS_OPTION_PORT_SAMPLE_TIMES_ASSIGNED, using
ssSetOptions, to tell the simulation engine that you are going to use
the port-based method to specify the rates of the input and output ports
individually. Next, as in the block-based method, you specify the periods and
offsets of all of the blocks rates, both internal and external, using
ssSetSampleTime
ssSetOffsetTime
Finally, as in the port-based method, you specify the rates for each port, using
ssSetInputPortSampleTime(S, idx, period)
7-36
Sample Times
ssSetInputPortOffsetTime(S, idx, offset)
ssSetOutputPortSampleTime(S, idx, period)
ssSetOutputPortOffsetTime(S, idx, offset)
Note that each of the assigned port rates must be the same as one of
the previously declared block rates. For an example S-function, see
matlabroot/simulink/src/mixedm.c.
Note If you use the SS_OPTION_PORT_SAMPLE_TIMES_ASSIGNED option, your
S-function cannot inherit sample times. Instead, you must specify the rate at
which each input and output port runs.
Multirate S-Function Blocks
In a multirate S-Function block, you can encapsulate the code that defines
each behavior in the mdlOutputs and mdlUpdate functions with a statement
that determines whether a sample hit has occurred. The ssIsSampleHit
macro determines whether the current time is a sample hit for a specified
sample time. The macro has this syntax:
ssIsSampleHit(S, st_index, tid)
where S is the SimStruct, st_index identifies a specific sample time index,
and tid is the task ID (tid is an argument to the mdlOutputs and mdlUpdate
functions).
For example, these statements specify three sample times: one for continuous
behavior and two for discrete behavior.
ssSetSampleTime(S, 0, CONTINUOUS_SAMPLE_TIME);
ssSetSampleTime(S, 1, 0.75);
ssSetSampleTime(S, 2, 1.0);
In the mdlUpdate function, the following statement encapsulates the code that
defines the behavior for the sample time of 0.75 second.
if (ssIsSampleHit(S, 1, tid)) {
}
7-37
7 Implementing Block Features
The second argument, 1, corresponds to the second sample time, 0.75 second.
Example of Defining a Sample Time for a Continuous Block
This example defines a sample time for a block that is continuous.
/* Initialize the sample time and offset. */
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, CONTINUOUS_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0.0);
}
You must add this statement to the mdlInitializeSizes function.
ssSetNumSampleTimes(S, 1);
Example of Defining a Sample Time for a Hybrid Block
This example defines sample times for a hybrid S-Function block.
/* Initialize the sample time and offset. */
static void mdlInitializeSampleTimes(SimStruct *S)
{
/* Continuous state sample time and offset. */
ssSetSampleTime(S, 0, CONTINUOUS_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0.0);
/* Discrete state sample time and offset. */
ssSetSampleTime(S, 1, 0.1);
ssSetOffsetTime(S, 1, 0.025);
}
In the second sample time, the offset causes Simulink to call the mdlUpdate
function at these times: 0.025 second, 0.125 second, 0.225 second, and so on,
in increments of 0.1 second.
The following statement, which indicates how many sample times are defined,
also appears in the mdlInitializeSizes function.
7-38
Sample Times
ssSetNumSampleTimes(S, 2);
Synchronizing Multirate S-Function Blocks
If tasks running at different rates need to share data, you must ensure that
data generated by one task is valid when accessed by another task running
at a different rate. You can use the ssIsSpecialSampleHit macro in the
mdlUpdate or mdlOutputs routine of a multirate S-function to ensure that the
shared data is valid. This macro returns true if a sample hit has occurred at
one rate and a sample hit has also occurred at another rate in the same time
step. It thus permits a higher rate task to provide data needed by a slower
rate task at a rate the slower task can accommodate.
Suppose, for example, that your model has an input port operating at one rate,
0, and an output port operating at a slower rate, 1. Further, suppose that you
want the output port to output the value currently on the input. The following
example illustrates usage of this macro.
if (ssISampleHit(S, 0, tid) {
if (ssIsSpecialSampleHit(S, 0, 1, tid) {
/* Transfer input to output memory. */
...
}
}
if (ssIsSampleHit(S, 1, tid) {
/* Emit output. */
...
}
In this example, the first block runs when a sample hit occurs at the input
rate. If the hit also occurs at the output rate, the block transfers the input to
the output memory. The second block runs when a sample hit occurs at the
output rate. It transfers the output in its memory area to the blocks output.
Note that higher-rate tasks always run before slower-rate tasks. Thus, the
input task in the preceding example always runs before the output task,
ensuring that valid data is always present at the output port.
7-39
7 Implementing Block Features
Specifying Model Reference Sample Time Inheritance
If your S-function inherits its sample times from the blocks that
drive it, it should specify whether submodels containing your
S-function can inherit sample times from their parent model. If
the S-functions output does not depend on its inherited sample
time, use the ssSetModelReferenceSampleTimeInheritanceRule
macro to set the S-functions sample time inheritance rule to
USE_DEFAULT_FOR_DISCRETE_INHERITANCE. Otherwise, set the rule to
DISALLOW_SAMPLE_TIME_INHERITANCE. Specifying the inheritance rule allows
Simulink to disallow sample-time inheritance for submodels that include
S-functions whose outputs depend on their inherited sample time and thereby
avoid inadvertent simulation errors.
Note If your S-function does not set this flag, Simulink assumes that it
does not preclude a submodel containing it from inheriting a sample time.
However, Simulink optionally warns the user that the submodel contains
S-functions that do not specify a sample-time inheritance rule (see Blocks
That Preclude Sample-Time Inheritance in the online Simulink help).
If you are uncertain whether an existing S-functions output depends on its
inherited sample time, check whether it invokes any of the following C macros:
ssGetSampleTime
ssGetInputPortSampleTime
ssGetOutputPortSampleTime
ssGetInputPortOffsetTime
ssGetOutputPortOffsetTime
ssGetSampleTimePtr
ssGetInputPortSampleTimeIndex
ssGetOutputPortSampleTimeIndex
ssGetSampleTimeTaskID
ssGetSampleTimeTaskIDPtr
7-40
Sample Times
or TLC functions:
LibBlockSampleTime
CompiledModel.SampleTime
LibBlockInputSignalSampleTime
LibBlockInputSignalOffsetTime
LibBlockOutputSignalSampleTime
LibBlockOutputSignalOffsetTime
If the S-function does not invoke any of these macros or functions, its output
does not depend on its inherited sample time and hence it is safe to use in
submodels that inherit their sample time.
Sample-Time Inheritance Rule Example
As an example of an S-function that precludes a submodel from inheriting
its sample time, consider an S-function that has the following mdlOutputs
method:
static void mdlOutputs(SimStruct *S, int_T tid) {
const real_T *u = (const real_T*)
ssGetInputPortSignal(S,0);
real_T *y = ssGetOutputPortSignal(S,0);
y[0] = ssGetSampleTime(S,tid) * u[0];
}
This output of this S-function is its inherited sample time, hence its output
depends on its inherited sample time, and hence it is unsafe to use in a
submodel. For this reason, this S-function should specify its model reference
inheritance rule as follows:
ssSetModelReferenceSampleTimeInheritanceRule
(S, DISALLOW_SAMPLE_TIME_INHERITANCE);
7-41
7 Implementing Block Features
Work Vectors
In this section...
About Work Vectors on page 7-42
Work Vectors and Zero Crossings on page 7-44
Example Involving a Pointer Work Vector on page 7-47
Memory Allocation on page 7-49
About Work Vectors
Work vectors are blocks of memory that an S-function can ask Simulink to
allocate to each instance of the S-function in a model. If multiple instances
of your S-function can occur in a model, your S-function must use work
vectors instead of global or static memory to store instance-specific values of
S-function variables. Otherwise, your S-function runs the risk of one instance
overwriting data needed by another instance, causing a simulation to fail or
produce incorrect results. The ability to keep track of multiple instances of
an S-function is called reentrancy.
You can create an S-function that is reentrant by using work vectors that
Simulink manages for each particular instance of the S-function. Integer,
floating-point (real), pointer, and general data types are supported. The
number of elements in each vector can be specified dynamically as a function
of the number of inputs to the S-function.
Work vectors have several advantages:
Instance-specific storage for block variables
Integer, real, pointer, and general data types
Elimination of static and global variables and the associated multiple
instance problems
For example, suppose youd like to track the previous value of each input signal
element entering input port 1 of your S-function. Either the discrete-state
vector or the real-work vector could be used for this, depending upon whether
the previous value is considered a discrete state (that is, compare the unit
7-42
Work Vectors
delay and the memory block). If you do not want the previous value to
be logged when states are saved, use the real-work vector, rwork. To do
this, in mdlInitializeSizes specify the length of this vector by using
ssSetNumRWork. Then in either mdlStart or mdlInitializeConditions,
initialize the rwork vector using ssSetRWorkValue. In mdlOutputs, you can
retrieve the previous inputs by using ssGetRWork. In mdlUpdate, update the
previous value of the rwork vector by using ssGetInputPortRealSignalPtrs.
See matlabroot/simulink/src/sfunmem.c for an example using the rwork
vector.
Use the macros in this table to specify the length of the work vectors for each
instance of your S-function in mdlInitializeSizes.
Macros Used in Specifying Vector Widths
Macro Description
ssSetNumContStates Width of the continuous-state vector
ssSetNumDiscStates Width of the discrete-state vector
ssSetNumDWork Width of the data type work vector
ssSetNumRWork Width of the real-work vector
ssSetNumIWork Width of the integer-work vector
ssSetNumPWork Width of the pointer-work vector
ssSetNumModes Width of the mode-work vector
ssSetNumNonsampledZCs Width of the nonsampled zero-crossing
vector
Specify vector widths in mdlInitializeSizes. There are three choices:
0 (the default). This indicates that the vector is not used by your S-function.
A positive nonzero integer. This is the width of the vector that is available
for use by mdlStart, mdlInitializeConditions, and S-function routines
called in the simulation loop.
The DYNAMICALLY_SIZED define. The default behavior for dynamically
sized vectors is to set them to the overall block width. Simulink does this
7-43
7 Implementing Block Features
after propagating line widths and sample times. The block width is the
width of the signal passing through your block. In general this is equal to
the output port width.
If the default behavior of dynamically sized vectors does not meet your
needs, use mdlSetWorkWidths and the macros listed in Macros Used in
Specifying Vector Widths on page 7-43, to set the sizes of the work vectors
explicitly. mdlSetWorkWidths also allows you to set your work vector lengths
as functions of the block sample time and/or port widths.
The continuous states are used when you have a state that needs to be
integrated by one of the Simulink solvers. When you specify continuous states,
you must return the states derivatives in mdlDerivatives. The discrete state
vector is used to maintain state information that changes at fixed intervals.
Typically the discrete state vector is updated in place in mdlUpdate.
The integer, real, and pointer work vectors are storage locations that are
not logged by Simulink during simulations. They maintain persistent data
between calls to your S-function.
Work Vectors and Zero Crossings
The mode-work vector and the nonsampled zero-crossing vector are
typically used with zero crossings. Elements of the mode vector are
integer values. You specify the number of mode-vector elements in
mdlInitializeSizes, using ssSetNumModes(S,num). You can then access
the mode vector using ssGetModeVector. The mode vector is used to
determine how the mdlOutputs routine should operate when the solvers
are homing in on zero crossings. The zero crossings or state events (i.e.,
discontinuities in the first derivatives) of some signal, usually a function
of an input to your S-function, are tracked by the solver by looking at the
nonsampled zero crossings. To register nonsampled zero crossings, set
the number of nonsampled zero crossings in mdlInitializeSizes, using
ssSetNumNonsampledZCs(S, num). Then define the mdlZeroCrossings
routine to return the nonsampled zero crossings. A zero-crossing example can
be found in matlabroot/simulink/src/sfun_zc_sat.c. The relevant pieces
of this S-function are shown below.
First, mdlInitializeSizes specifies the sizes for the mode and nonsampled
zero-crossing vectors using the following lines of code.
7-44
Work Vectors
ssSetNumModes(S, DYNAMICALLY_SIZED);
ssSetNumNonsampledZCs(S, DYNAMICALLY_SIZED);
Since the number of modes and nonsampled zero crossings is dynamically
sized, mdlSetWorkWidths must initialize the actual size of these vectors. In
this example, shown below, there is one mode vector for each output element
and two nonsampled zero crossings for each mode. In general, the number
of nonsampled zero crossings needed for each mode depends on the number
of events that need to be detected. In this case, each output (mode) needs to
detect when it hits the upper or the lower bound, hence two nonsampled
zero crossings per mode.
static void mdlSetWorkWidths(SimStruct *S)
{
int nModes;
int nNonsampledZCs;
nModes = numOutput;
nNonsampledZCs = 2 * numOutput;
ssSetNumModes(S,nModes);
ssSetNumNonsampledZCs(S,nNonsampledZCs);
}
Next, mdlOutputs determines which mode the simulation is running in at
the beginning of each major time step. By storing this information in the
mode vector, it is then available when calculating outputs at both major and
minor time steps.
/* Get the mode vector */
int_T *mode = ssGetModeVector(S);
/* Specify three possible mode values.*/
enum { UpperLimitEquation, NonLimitEquation, LowerLimitEquation };
/* Update the mode vector at the beginning of a major time step */
if ( ssIsMajorTimeStep(S) ) {
for ( iOutput = 0; iOutput < numOutput; iOutput++ ) {
if ( *uPtrs[uIdx] > *upperLimit ) {
/* Upper limit is reached. */
mode[iOutput] = UpperLimitEquation;
7-45
7 Implementing Block Features
} else if ( *uPtrs[uIdx] < *lowerLimit ) {
/* Lower limit is reached. */
mode[iOutput] = LowerLimitEquation;
} else {
/* Output is not limited. */
mode[iOutput] = NonLimitEquation;
}
/* Adjust indices to give scalar expansion. */
uIdx += uInc;
upperLimit += upperLimitInc;
lowerLimit += lowerLimitInc;
}
/* Reset index to input and limits. */
uIdx = 0;
upperLimit = mxGetPr( P_PAR_UPPER_LIMIT );
lowerLimit = mxGetPr( P_PAR_LOWER_LIMIT );
} /* end IsMajorTimeStep */
Output calculations in mdlOutputs are finally done based on the values stored
in the mode vector.
for ( iOutput = 0; iOutput < numOutput; iOutput++ ) {
if ( mode[iOutput] == UpperLimitEquation ) {
/* Output upper limit. */
*y++ = *upperLimit;
} else if ( mode[iOutput] == LowerLimitEquation ) {
/* Output lower limit. */
*y++ = *lowerLimit;
} else {
/* Output is equal to input */
*y++ = *uPtrs[uIdx];
}
7-46
Work Vectors
After outputs are calculated, Simulink calls mdlZeroCrossings to determine
if a zero crossing has occurred. A zero crossing is detected if any element
of the nonsampled zero-crossing vector switches from negative to positive,
or positive to negative. If this occurs, the simulation modifies the step size
and recalculates the outputs to try to locate the exact zero crossing. For this
example, the values for the nonsampled zero-crossing vectors are calculated
as shown below.
static void mdlZeroCrossings(SimStruct *S)
{
int_T iOutput;
int_T numOutput = ssGetOutputPortWidth(S,0);
real_T *zcSignals = ssGetNonsampledZCs(S);
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
/* Set index and increment for the input signal, upper limit, and lower
* limit parameters so that each gives scalar expansion if needed. */
int_T uIdx = 0;
int_T uInc = ( ssGetInputPortWidth(S,0) > 1 );
const real_T *upperLimit = mxGetPr( P_PAR_UPPER_LIMIT );
int_T upperLimitInc = ( mxGetNumberOfElements( P_PAR_UPPER_LIMIT ) > 1 );
const real_T *lowerLimit = mxGetPr( P_PAR_LOWER_LIMIT );
int_T lowerLimitInc = ( mxGetNumberOfElements( P_PAR_LOWER_LIMIT ) > 1 );
/*Check if the input has crossed an upper or lower limit */
for ( iOutput = 0; iOutput < numOutput; iOutput++ ) {
zcSignals[2*iOutput] = *uPtrs[uIdx] - *upperLimit;
zcSignals[2*iOutput+1] = *uPtrs[uIdx] - *lowerLimit;
/* Adjust indices to give scalar expansion if needed */
uIdx += uInc;
upperLimit += upperLimitInc;
lowerLimit += lowerLimitInc;
}
}
Example Involving a Pointer Work Vector
This example opens a file and stores the FILE pointer in the pointer-work
vector.
7-47
7 Implementing Block Features
The following statement, included in the mdlInitializeSizes function,
indicates that the pointer-work vector is to contain one element.
ssSetNumPWork(S, 1) /* pointer-work vector */
The following code uses the pointer-work vector to store a FILE pointer,
returned from the standard I/O function fopen.
#define MDL_START /* Change to #undef to remove function. */
#if defined(MDL_START)
static void mdlStart(real_T *x0, SimStruct *S)
{
FILE *fPtr;
void **PWork = ssGetPWork(S);
fPtr = fopen("file.data", "r");
PWork[0] = fPtr;
}
#endif /* MDL_START */
This code retrieves the FILE pointer from the pointer-work vector and passes
it to fclose to close the file.
static void mdlTerminate(SimStruct *S)
{
if (ssGetPWork(S) != NULL) {
FILE *fPtr;
fPtr = (FILE *) ssGetPWorkValue(S,0);
if (fPtr != NULL) {
fclose(fPtr);
}
ssSetPWorkValue(S,0,NULL);
}
}
Note If you are using mdlSetWorkWidths, any work vectors you use in your
S-function should be set to DYNAMICALLY_SIZED in mdlInitializeSizes, even
if the exact value is known before mdlInitializeSizes is called. The size to
be used by the S-function should be specified in mdlSetWorkWidths.
7-48
Work Vectors
The synopsis is
#define MDL_SET_WORK_WIDTHS /* Change to #undef to remove function. */
#if defined(MDL_SET_WORK_WIDTHS) && defined(MATLAB_MEX_FILE)
static void mdlSetWorkWidths(SimStruct *S)
{
}
#endif /* MDL_SET_WORK_WIDTHS */
For an example, see matlabroot/simulink/src/sfun_dynsize.c.
Memory Allocation
When you are creating an S-function, the available work vectors might not
provide enough capability. In this case, you need to allocate memory for each
instance of your S-function. The standard MATLAB API memory allocation
routines mxCalloc and mxFree should not be used with C MEX S-functions,
because these routines are designed to be used with MEX-files that are called
from MATLAB and not Simulink. The correct approach for allocating memory
is to use the stdlib.h library routines calloc and free. In mdlStart,
allocate and initialize the memory
UD *ptr = (UD *)calloc(1,sizeof(UD));
where UD, in this example, is a data structure defined at the beginning of the
S-function. Then, place the pointer to it either in pointer-work vector elements
ssSetPWorkValue(S, 0, ptr);
or attach it as user data.
ssSetUserData(S,ptr);
In mdlTerminate, free the allocated memory. For example, if the pointer was
stored in the user data
UD *prt = ssGetUserData(S);
free(prt);
7-49
7 Implementing Block Features
Function-Call Subsystems
You can create a triggered subsystem whose execution is determined by logic
internal to an S-function instead of by the value of a signal. A subsystem so
configured is called a function-call subsystem. To implement a function-call
subsystem:
In the Trigger block, select function-call as the Trigger type parameter.
In the S-function, use the ssEnableSystemWithTid and
ssDisableSystemWithTid to enable or disable the triggered
subsystem and the ssCallSystemWithTid macro to call the triggered
subsystem.
In the model, connect the S-Function block output directly to the trigger
port.
Note Function-call connections can only be performed on the first output
port.
Function-call subsystems are not executed directly by Simulink; rather, the
S-function determines when to execute the subsystem. When the subsystem
completes execution, control returns to the S-function. This figure illustrates
the interaction between a function-call subsystem and an S-function.
In this figure, ssCallSystemWithTid executes the function-call subsystem
that is connected to the first output port element. ssCallSystemWithTid
returns 0 if an error occurs while executing the function-call subsystem or if
the output is unconnected. After the function-call subsystem executes, control
is returned to your S-function.
7-50
Function-Call Subsystems
Function-call subsystems can only be connected to S-functions that have been
properly configured to accept them.
To configure an S-function to call a function-call subsystem:
Specify the elements that are to execute the function-call subsystem in
mdlInitializeSampleTimes. For example:
ssSetCallSystemOutput(S,0); /* call on first element */
ssSetCallSystemOutput(S,1); /* call on second element */
Specify in mdlInitializeSampleTimes whether you want the S-function to
be able to enable or disable the function-call subsystem. Only S-functions
that explicitly enable and disable the function-call subsystem can reset the
states and outputs of the subsystem, as determined by the function-call
subsystems Trigger and Outport blocks. For example, the code
ssSetExplicitFCSSCtrl(S, 1);
in mdlInitializeSampleTimes specifies that the S-function can enable
and disable the function-call subsystem. In this case, the S-function must
invoke ssEnableSystemWithTid before executing the subsystem using
ssCallSystemWithTid.
7-51
7 Implementing Block Features
Execute the subsystem in the appropriate mdlOutputs or mdlUpdate
S-function routine. For example:
static void mdlOutputs(...)
{
if (((int)*uPtrs[0]) % 2 == 1) {
if (!ssCallSystemWithTid(S,0,tid)) {
/* Error occurred, which will be reported by */
/*Simulink*/
return;
}
} else {
if (!ssCallSystemWithTid(S,1,tid)) {
/* Error occurred, which will be reported by */
/*Simulink*/
return;
}
}
...
}
Note Do not use ssSetOutputPortDataType or ssGetOutputPortDataType
on an S-function output that emits function-call signals. Simulink explicitly
controls the data type of these output signals.
See matlabroot/simulink/src/sfun_fcncall.c for an example that
executes a function-call subsystem on the first and second elements of the
S-functions first output. The following Simulink model implements this
S-function.
7-52
Function-Call Subsystems
Each of the function-call subsystems is a simple feedback loop containing a
Unit Delay block, as shown below.
When the Pulse Generator emits its upper value, the function-call subsystem
connected to the first element of the S-functions first output port is triggered.
Similarly, when the Pulse Generator emits its lower value, the function-call
subsystem connected to the second element is triggered. The simulation
output is shown on the Scope, below.
7-53
7 Implementing Block Features
Function-call subsystems are a powerful modeling construct. You can
configure Stateflow
blocks to execute function-call subsystems, thereby
extending the capabilities of the blocks. For more information on their use in
Stateflow, see the Stateflow documentation.
7-54
Sim Viewing Devices in External Mode
Sim Viewing Devices in External Mode
A sim viewing device encapsulates processing and viewing of signals received
from the target system in external mode. During simulation in external mode,
the target system uploads the appropriate input values to the sim viewing
device in the Simulink model. The sim viewing device then conditions the
input signals as needed and renders the signals on the screen. A sim viewing
device runs only on the host, generating no code in the target system and,
therefore, allowing extra processing of displayed signals without burdening
the generated code.
You can use your S-function as a sim viewing device in external mode if it
satisfies the following conditions.
The S-function has no output ports.
The S-function contains no states.
The generated code does not require the conditioned signals produced by
the S-function.
To specify the S-function is a sim viewing device, set the
SS_OPTION_SIM_VIEWING_DEVICE option in the mdlInitializeSizes
function. For example
ssSetOptions(S, SS_OPTION_SIM_VIEWING_DEVICE);
External mode compatible S-functions are selected, and the trigger is armed,
by using the External Signal & Triggering dialog box. For more information
see External Mode in the Real-Time Workshop documentation.
7-55
7 Implementing Block Features
Processing Frame-Based Signals
This section explains how to create an S-function that accepts and/or
produces frame-based signals. See Frame-Based Signals in the Working
with Signals section of the Signal Processing Blockset documentation for
a comprehensive discussion of the use of frame-based signals in Simulink
models.
Note Simulating a model containing the S-function that you develop requires
a Signal Processing Blockset license.
To accept or produce frame-based signals, an S-function must perform the
following tasks:
The S-functions mdlInitializeSizes callback method must set the port
frame status to FRAME_YES, FRAME_NO, or FRAME_INHERITED for each of
the S-functions I/O ports, using the ssSetInputPortFrameData and
ssSetOutputPortFrameData functions. The frame status for a port must
be set after the call to ssSetNumInputPorts and ssSetNumOutputPorts.
For example, the following code in mdlInitializeSizes specifies that
the first input port accepts a frame-based signal while the first output
port emits a sample-based signal:
ssSetNumInputPorts(S, 1);
ssSetInputPortFrameData(S, 0, FRAME_YES);
ssSetNumOutputPorts(S,1);
ssSetOutputPortFrameData(S, 0, FRAME_NO);
The S-function should specify the dimensions of the signals that its
frame-based ports accept or produce in its mdlInitializeSizes or
mdlSetInputPortDimensionInfo and mdlSetOutputPortDimensionInfo
callback methods. Note that frame-based signals must be dimensioned as
2-D arrays. For example, the following code in mdlInitializeSizes specifies
that the first frame-based input port is dynamically sized. This S-function
must then also have an mdlSetInputPortDimensionInfo callback that sets
the specific dimensions of this input port.
7-56
Processing Frame-Based Signals
ssSetNumInputPorts(S, 1);
ssSetInputPortFrameData(S, 0, FRAME_YES);
ssSetInputPortMatrixDimensions(S, 0, DYNAMICALLY_SIZED, DYNAMICALLY_SIZED);
If the frame status of any of the S-functions input ports is inherited, the
S-function should define a mdlSetInputPortFrameData callback method.
Simulink passes the frame status that it assigns to the port, based on frame
signal propagation rules, as an argument to this callback method. The
callback method should in turn use the ssSetInputPortFrameData function
to set the port to the assigned status if it is acceptable or signal an error
using ssSetErrorStatus if it is not. If the frame status of other ports of the
S-function depend on the status inherited by one of its input ports, the
callback method can also use ssSetInputPortFrameData to set the frame
status of the other ports based on the status that the input port inherits. A
template for the mdlSetInputPortFrameData callback is shown below.
#if defined(MATLAB_MEX_FILE)
#define MDL_SET_INPUT_PORT_FRAME_DATA
static void mdlSetInputPortFrameData(SimStruct *S,
int_T portIndex,
Frame_T frameData)
{
if(!frameData==FRAME_YES) {
ssSetErrorStatus(S, "Incorrect frame status");
return;
}
ssSetInputPortFrameData(S, portIndex, frameData); /* Sets frame status */
} /* end mdlSetInputPortFrameData */
#endif
The S-functions mdlOutputs method should include code to process the
signals. The macro ssGetInputPortDimensions can be used in mdlOutputs
to determine the dimensions of dynamically sized frame-based inputs, as
follows:
int *dims = ssGetInputPortDimensions(S, 0);
int frameSize = dims[0];
int numChannels = dims[1];
7-57
7 Implementing Block Features
See the frame-based A/D converter S-function example (sfun_frmad.c) for
an example of how to create a frame-based S-function. This S-function is
one of several S-functions that manipulate frame-based signals found in the
Simulink model sfcndemo_frame.mdl.
7-58
Handling Errors
Handling Errors
In this section...
About Handling Errors on page 7-59
Exception Free Code on page 7-60
ssSetErrorStatus Termination Criteria on page 7-61
Checking Array Bounds on page 7-62
About Handling Errors
When working with S-functions, it is important to handle unexpected events
such as invalid parameter values correctly.
If your S-function has parameters whose contents you need to validate, use
the following technique to report errors encountered.
ssSetErrorStatus(S,"Error encountered due to ...");
return;
In most cases, the error message is displayed in the Simulink Diagnostics
Viewer. If the error is encountered in mdlCheckParameters as the S-function
parameters are being entered into the block dialog, the error dialog shown
below is opened. In either case, the error message is displayed along with
the name of the S-function and the associated S-function block that invoked
the error.
7-59
7 Implementing Block Features
Note that the second argument to ssSetErrorStatus must be persistent
memory. It cannot be a local variable in your procedure. For example, the
following causes unpredictable errors.
mdlOutputs()
{
char msg[256]; /* ILLEGAL: should be "static char */
/*msg[256];"*/
sprintf(msg,"Error due to %s", string);
ssSetErrorStatus(S,msg);
return;
}
Because ssSetErrorStatus does not generate exceptions, using it to
report errors in your S-function is preferable to using mexErrMsgTxt. The
mexErrMsgTxt function uses exception handling to terminate S-function
execution and return control to Simulink. To support exception handling in
S-functions, Simulink must set up exception handlers prior to each S-function
invocation. This introduces overhead into simulation.
Exception Free Code
You can avoid this overhead by ensuring that your S-function contains entirely
exception free code. Exception free code refers to code that never long-jumps.
Your S-function is not exception free if it contains any routine that, when
called, has the potential of long-jumping. For example, mexErrMsgTxt throws
an exception (i.e., long-jumps) when called, thus ending execution of your
S-function. Using mxCalloc can cause unpredictable results in the event of a
memory allocation error, because mxCalloc long-jumps. If memory allocation
is needed, use the stdlib.h calloc routine directly and perform your own
error handling.
If you do not call mexErrMsgTxt or other API routines that cause exceptions,
use the SS_OPTION_EXCEPTION_FREE_CODE S-function option. You do this by
issuing the following command in the mdlInitializeSizes function.
ssSetOptions(S, SS_OPTION_EXCEPTION_FREE_CODE);
Setting this option increases the performance of your S-function by allowing
Simulink to bypass the exception-handling setup that is usually performed
7-60
Handling Errors
prior to each S-function invocation. You must take extreme care to verify that
your code is exception free when using SS_OPTION_EXCEPTION_FREE_CODE. If
your S-function generates an exception when this option is set, unpredictable
results occur.
All mex* routines have the potential of long-jumping. Several mx* routines
also have the potential of long-jumping. To avoid any difficulties, use only the
API routines that retrieve a pointer or determine the size of parameters.
For example, the following never throw an exception: mxGetPr, mxGetData,
mxGetNumberOfDimensions, mxGetM, mxGetN, and mxGetNumberOfElements.
Code in run-time routines can also throw exceptions. Run-time routines refer
to certain S-function routines that Simulink calls during the simulation
loop (see How Simulink Interacts with C S-Functions on page 3-74). The
run-time routines include
mdlGetTimeOfNextVarHit
mdlOutputs
mdlUpdate
mdlDerivatives
If all run-time routines within your S-function are exception free, you can
use this option:
ssSetOptions(S, SS_OPTION_RUNTIME_EXCEPTION_FREE_CODE);
The other routines in your S-function do not have to be exception free.
ssSetErrorStatus Termination Criteria
If one of your S-functions callback methods invokes ssSetErrorStatus
during a simulation, Simulink posts the error and terminates the
simulation as soon as the callback method returns. If your S-functions
SS_OPTION_CALL_TERMINATE_ON_EXIT option is enabled (see ssSetOptions),
Simulink invokes your S-functions mdlTerminate method as part of
the termination process. Otherwise, Simulink invokes your S-functions
mdlTerminate method only if at least one block mdlStart method has
executed without error during the simulation.
7-61
7 Implementing Block Features
Checking Array Bounds
If your S-function causes otherwise inexplicable errors, the reason might
be that the S-function is writing beyond its assigned areas in memory. You
can verify this possibility by enabling the Simulink array bounds checking
feature. This feature detects any attempt by an S-Function block to write
beyond the areas assigned to it for the following types of block data:
Work vectors (R, I, P, D, and mode)
States (continuous and discrete)
Outputs
To enable array bounds checking, select warning or error from the Array
bounds exceeded options list in the Debugging group on the Diagnostics
-Data Validity pane of the Configuration Parameters dialog box or enter
the following command at the MATLAB command line.
set_param(modelName, 'ArrayBoundsChecking', ValueStr)
where modelName is the name of the Simulink model and ValueStr is either
'none', 'warning', or 'error'.
7-62
S-Function Examples
S-Function Examples
In this section...
About S-Function Examples on page 7-63
Continuous States on page 7-63
Discrete States on page 7-70
Continuous and Discrete States on page 7-77
Variable Sample Time on page 7-84
Array Inputs and Outputs on page 7-90
Zero-Crossing Detection on page 7-102
Discontinuities in Continuous States on page 7-119
About S-Function Examples
Most S-Function blocks require the handling of states, continuous or
discrete. All examples are based on the C MEX-file S-function template
sfuntmpl_basic.c and on sfuntmpl_doc.c, which contains a discussion
of the S-function template.
Continuous States
The matlabroot/simulink/src/csfunc.c example shows how to model a
continuous system with states in a C MEX S-function. The following Simulink
model uses this S-function.
matlabroot/toolbox/simulink/simdemos/simfeatures/sfcndemo_csfunc.mdl
In continuous state integration, the Simulink solvers integrate a set of
continuous states using the following equations.
7-63
7 Implementing Block Features
S-functions that contain continuous states implement a state-space equation.
The mdlOutputs method contains the output portion and mdlDerivatives
method contains the derivative portion of the state-space equation. To
visualize how the integration works, see the flowchart in How Simulink
Interacts with C S-Functions on page 3-74. The output equation corresponds
to the mdlOutputs in the major time step. Next, the example enters the
integration section of the flowchart. Here Simulink performs a number of
minor time steps during which it calls mdlOutputs and mdlDerivatives.
Each of these pairs of calls is referred to as an integration stage. The
integration returns with the continuous states updated and the simulation
time moved forward. Time is moved forward as far as possible, providing that
error tolerances in the state are met. The maximum time step is subject to
constraints of discrete events such as the actual simulation stop time and
the user-imposed limit.
The csfunc.c example specifies that the input port has direct feedthrough.
This is because matrix D is initialized to a nonzero matrix. If D is set equal to
a zero matrix in the state-space representation, the input signal is not used
in mdlOutputs. In this case, the direct feedthrough can be set to 0, which
indicates that csfunc.c does not require the input signal when executing
mdlOutputs.
matlabroot/simulink/src/csfunc.c
The S-function begins with #define statements for the S-functions name
and level, and a #include statement for the simstruc.h header. After these
statements, the S-function can include or define any other necessary headers,
data, etc. The csfunc.c example defines the variable U as a pointer to the first
input ports signal and initializes static variables for the state-space matrices.
/* File : csfunc.c
* Abstract:
7-64
S-Function Examples
*
* Example C-file S-function for defining a continuous system.
*
* x' = Ax + Bu
* y = Cx + Du
*
* For more details about S-functions, see simulink/src/sfuntmpl_doc.c.
*
* Copyright 1990-2007 The MathWorks, Inc.
*/
#define S_FUNCTION_NAME csfunc
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
#define U(element) (*uPtrs[element]) /* Pointer to Input Port0 */
static real_T A[2][2]={ { -0.09, -0.01 } ,
{ 1 , 0 }
};
static real_T B[2][2]={ { 1 , -7 } ,
{ 0 , -2 }
};
static real_T C[2][2]={ { 0 , 2 } ,
{ 1 , -5 }
};
static real_T D[2][2]={ { -3 , 0 } ,
{ 1 , 0 }
};
The required S-function method mdlInitializeSizes then sets up the
following S-function characteristics.
ssSetNumSFcnParams sets the number of expected S-function dialog
parameters to zero.
7-65
7 Implementing Block Features
ssGetSFcnParamsCount determines how many parameters the user actually
entered into the S-function dialog. If the number of user-specified
parameters does not match the number returned by ssGetNumSFcnParams,
the S-function errors out.
If the S-function parameter count passes, mdlInitializeSizes sets the
number of continuous and discrete states using ssSetNumContStates and
ssSetNumDiscStates, respectively. This example has two continuous states
and zero discrete states.
Next, the method configures the S-function to have a single input
and output port, each with a width of two to match the dimensions
of the state-space matrices. The method passes a value of 1 to
ssSetInputPortDirectFeedThrough to indicate the input port has direct
feedthrough.
ssSetNumSampleTimes initializes one sample time, which the
mdlInitializeSampleTimes function configures later.
The S-function indicates that no work vectors are used by passing a value
of 0 to ssSetNumRWork, ssSetNumIWork, etc. These lines could be omitted
because zero is the default value for all of these macros. However, for
clarity, the S-function explicitly sets the number of work vectors.
Lastly, ssSetOptions sets any applicable options. In this case, the only
option is SS_OPTION_EXCEPTION_FREE_CODE, which stipulates that the
code is exception free.
The mdlInitializeSizes function for this example is shown below.
/*====================*
* S-function methods *
*====================*/
/* Function: mdlInitializeSizes ===============================================
* Abstract:
* The sizes information is used by Simulink to determine the S-function
* block's characteristics (number of inputs, outputs, states, etc.).
*/
static void mdlInitializeSizes(SimStruct *S)
{
ssSetNumSFcnParams(S, 0); /* Number of expected parameters */
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) {
7-66
S-Function Examples
return; /* Parameter mismatch will be reported by Simulink */
}
ssSetNumContStates(S, 2);
ssSetNumDiscStates(S, 0);
if (!ssSetNumInputPorts(S, 1)) return;
ssSetInputPortWidth(S, 0, 2);
ssSetInputPortDirectFeedThrough(S, 0, 1);
if (!ssSetNumOutputPorts(S, 1)) return;
ssSetOutputPortWidth(S, 0, 2);
ssSetNumSampleTimes(S, 1);
ssSetNumRWork(S, 0);
ssSetNumIWork(S, 0);
ssSetNumPWork(S, 0);
ssSetNumModes(S, 0);
ssSetNumNonsampledZCs(S, 0);
/* Take care when specifying exception free code - see sfuntmpl_doc.c */
ssSetOptions(S, SS_OPTION_EXCEPTION_FREE_CODE);
}
The required S-function method mdlInitializeSampleTimes specifies
the S-functions sample rates. The value CONTINOUS_SAMPLE_TIME
passed to the ssSetSampleTime macro specifies that the
S-functions first sample rate is continuous. ssSetOffsetTime then
specifies an offset time of zero for this sample rate. The call to
ssSetModelReferenceSampleTimeDefaultInheritance tells the solver to
use the default rule to determine if submodels containing this S-function can
inherit their sample times from the parent model.
/* Function: mdlInitializeSampleTimes =========================================
* Abstract:
* Specifiy that we have a continuous sample time.
*/
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, CONTINUOUS_SAMPLE_TIME);
7-67
7 Implementing Block Features
ssSetOffsetTime(S, 0, 0.0);
ssSetModelReferenceSampleTimeDefaultInheritance(S);
}
The optional S-function method mdlInitializeConditions initializes the
continuous state vector. The #define statement before this method is required
for Simulink to call this function. In the example below, ssGetContStates
obtains a pointer to the continuous state vector. The for loop then initializes
each state to zero.
#define MDL_INITIALIZE_CONDITIONS
/* Function: mdlInitializeConditions ========================================
* Abstract:
* Initialize both continuous states to zero.
*/
static void mdlInitializeConditions(SimStruct *S)
{
real_T *x0 = ssGetContStates(S);
int_T lp;
for (lp=0;lp<2;lp++) {
*x0++=0.0;
}
}
The required mdlOutputs function computes the output signal of this
S-function. The beginning of the function obtains pointers to the first output
port, continuous states, and first input port. The S-function uses the data in
these arrays to solve the output equation y=Cx+Du.
/* Function: mdlOutputs =======================================================
* Abstract:
* y = Cx + Du
*/
static void mdlOutputs(SimStruct *S, int_T tid)
{
real_T *y = ssGetOutputPortRealSignal(S,0);
real_T *x = ssGetContStates(S);
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
7-68
S-Function Examples
UNUSED_ARG(tid); /* not used in single tasking mode */
/* y=Cx+Du */
y[0]=C[0][0]*x[0]+C[0][1]*x[1]+D[0][0]*U(0)+D[0][1]*U(1);
y[1]=C[1][0]*x[0]+C[1][1]*x[1]+D[1][0]*U(0)+D[1][1]*U(1);
}
The mdlDerivatives function calculates the continuous state derivatives.
Because this function is an optional method, a #define statement must
precede the function. The beginning of the function obtains pointers to the
S-functions continuous states, state derivatives, and first input port. The
S-function uses this data to solve the equation dx=Ax+Bu.
#define MDL_DERIVATIVES
/* Function: mdlDerivatives =================================================
* Abstract:
* xdot = Ax + Bu
*/
static void mdlDerivatives(SimStruct *S)
{
real_T *dx = ssGetdX(S);
real_T *x = ssGetContStates(S);
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
/* xdot=Ax+Bu */
dx[0]=A[0][0]*x[0]+A[0][1]*x[1]+B[0][0]*U(0)+B[0][1]*U(1);
dx[1]=A[1][0]*x[0]+A[1][1]*x[1]+B[1][0]*U(0)+B[1][1]*U(1);
}
Simulink requires the S-function to contain an mdlTerminate function. In
this example, the function is empty.
/* Function: mdlTerminate =====================================================
* Abstract:
* No termination needed, but we are required to have this routine.
*/
static void mdlTerminate(SimStruct *S)
{
UNUSED_ARG(S); /* unused input argument */
}
7-69
7 Implementing Block Features
The required S-function trailer includes the files necessary for simulation or
code generation, as follows.
#ifdef MATLAB_MEX_FILE /* Is this file being compiled as a MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration function */
#endif
Note The mdlOutputs and mdlTerminate functions use the
UNUSED_ARG macro to indicate that an input argument the
callback requires is not used. This optional macro is defined in
matlabroot/simulink/include/simstruc_types.h. If used, you must call
this macro once for each input argument that a callback does not use.
Discrete States
The matlabroot/simulink/src/dsfunc.c example shows how to model a
discrete system in a C MEX S-function. The following Simulink model uses
this S-function.
matlabroot/toolbox/simulink/simdemos/simfeatures/sfcndemo_dsfunc.mdl
Discrete systems can be modeled by the following set of equations.
The dsfunc.c example implements a discrete state-space equation. The
mdlOutputs method contains the output portion and the mdlUpdate method
contains the update portion of the discrete state-space equation. To visualize
how the simulation works, see the flowchart in How Simulink Interacts
with C S-Functions on page 3-74. The output equation above corresponds
7-70
S-Function Examples
to the mdlOutputs in the major time step. The preceding update equation
corresponds to the mdlUpdate in the major time step. If your model does not
contain continuous elements, Simulink skips the integration phase and time
is moved forward to the next discrete sample hit.
matlabroot/simulink/src/dsfunc.c
The S-function begins with #define statements for the S-functions name and
level, along with a #include statement for the simstruc.h header. After
these statements, the S-function can include or define any other necessary
headers, data, etc. The dsfunc.c example defines U as a pointer to the first
input ports signal and initializes static variables for the state-space matrices.
/* File : dsfunc.c
* Abstract:
*
* Example C-file S-function for defining a discrete system.
*
* x(n+1) = Ax(n) + Bu(n)
* y(n) = Cx(n) + Du(n)
*
* For more details about S-functions, see simulink/src/sfuntmpl_doc.c.
*
* Copyright 1990-2007 The MathWorks, Inc.
*/
#define S_FUNCTION_NAME dsfunc
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
#define U(element) (*uPtrs[element]) /* Pointer to Input Port0 */
static real_T A[2][2]={ { -1.3839, -0.5097 } ,
{ 1 , 0 }
};
static real_T B[2][2]={ { -2.5559, 0 } ,
{ 0 , 4.2382 }
};
7-71
7 Implementing Block Features
static real_T C[2][2]={ { 0 , 2.0761 } ,
{ 0 , 7.7891 }
};
static real_T D[2][2]={ { -0.8141, -2.9334 } ,
{ 1.2426, 0 }
};
The required S-function method mdlInitializeSizes then sets up the
following S-function characteristics.
ssSetNumSFcnParams sets the number of expected S-function dialog
parameters to zero.
ssGetSFcnParamsCount determines how many parameters the user actually
entered into the S-function dialog. If the number of user-specified
parameters does not match the number returned by ssGetNumSFcnParams,
the S-function errors out.
If the S-function parameter count passes, mdlInitializeSizes next sets
the number of continuous and discrete states using ssSetNumContStates
and ssSetNumDiscStates, respectively. This example has zero continuous
states and two discrete states.
Next, the method configures the S-function to have a single input
and output port, each with a width of two to match the dimensions
of the state-space matrices. The method passes a value of 1 to
ssSetInputPortDirectFeedThrough to indicate the input port has direct
feedthrough.
ssSetNumSampleTimes initializes one sample time, which the
mdlInitializeSampleTimes function configures later.
The S-function indicates that no work vectors are used by passing a value
of 0 to ssSetNumRWork, ssSetNumIWork, etc. These lines could be omitted
because zero is the default value for all of these macros. However, for
clarity, the S-function explicitly sets the number of work vectors.
Lastly, ssSetOptions sets any applicable options. In this case, the only
option is SS_OPTION_EXCEPTION_FREE_CODE, which stipulates that the
code is exception free.
7-72
S-Function Examples
The mdlInitializeSizes function for this example is shown below.
/*====================*
* S-function methods *
*====================*/
/* Function: mdlInitializeSizes ===============================================
* Abstract:
* The sizes information is used by Simulink to determine the S-function
* block's characteristics (number of inputs, outputs, states, etc.).
*/
static void mdlInitializeSizes(SimStruct *S)
{
ssSetNumSFcnParams(S, 0); /* Number of expected parameters */
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) {
return; /* Parameter mismatch will be reported by Simulink */
}
ssSetNumContStates(S, 0);
ssSetNumDiscStates(S, 2);
if (!ssSetNumInputPorts(S, 1)) return;
ssSetInputPortWidth(S, 0, 2);
ssSetInputPortDirectFeedThrough(S, 0, 1);
if (!ssSetNumOutputPorts(S, 1)) return;
ssSetOutputPortWidth(S, 0, 2);
ssSetNumSampleTimes(S, 1);
ssSetNumRWork(S, 0);
ssSetNumIWork(S, 0);
ssSetNumPWork(S, 0);
ssSetNumModes(S, 0);
ssSetNumNonsampledZCs(S, 0);
/* Take care when specifying exception free code - see sfuntmpl_doc.c */
ssSetOptions(S, SS_OPTION_EXCEPTION_FREE_CODE);
}
7-73
7 Implementing Block Features
The required S-function method mdlInitializeSampleTimes specifies
the S-functions sample rates. A call to ssSetSampleTime sets
this S-functions first sample period to 1.0. ssSetOffsetTime then
specifies an offset time of zero for the first sample rate. The call to
ssSetModelReferenceSampleTimeDefaultInheritance tells the solver to
use the default rule to determine if submodels containing this S-function can
inherit their sample times from the parent model.
/* Function: mdlInitializeSampleTimes =========================================
* Abstract:
* Specifiy a sample time 0f 1.0.
*/
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, 1.0);
ssSetOffsetTime(S, 0, 0.0);
ssSetModelReferenceSampleTimeDefaultInheritance(S);
}
The optional S-function method mdlInitializeConditions initializes the
discrete state vector. The #define statement before this method is required
for Simulink to call this function. In the example below, ssGetRealDiscStates
obtains a pointer to the discrete state vector. The for loop then initializes
each discrete state to one.
#define MDL_INITIALIZE_CONDITIONS
/* Function: mdlInitializeConditions ========================================
* Abstract:
* Initialize both discrete states to one.
*/
static void mdlInitializeConditions(SimStruct *S)
{
real_T *x0 = ssGetRealDiscStates(S);
int_T lp;
for (lp=0;lp<2;lp++) {
*x0++=1.0;
}
}
7-74
S-Function Examples
The required mdlOutputs function computes the output signal of this
S-function. The beginning of the function obtains pointers to the first output
port, discrete states, and first input port. The S-function uses the data in
these arrays to solve the output equation y=Cx+Du.
/* Function: mdlOutputs =======================================================
* Abstract:
* y = Cx + Du
*/
static void mdlOutputs(SimStruct *S, int_T tid)
{
real_T *y = ssGetOutputPortRealSignal(S,0);
real_T *x = ssGetRealDiscStates(S);
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
UNUSED_ARG(tid); /* not used in single tasking mode */
/* y=Cx+Du */
y[0]=C[0][0]*x[0]+C[0][1]*x[1]+D[0][0]*U(0)+D[0][1]*U(1);
y[1]=C[1][0]*x[0]+C[1][1]*x[1]+D[1][0]*U(0)+D[1][1]*U(1);
}
Simulink calls the mdlUpdate function once every major integration time step
to update the discrete states values. Because this function is an optional
method, a #define statement must precede the function. The beginning of
the function obtains pointers to the S-functions discrete states and first input
port. The S-function uses the data in these arrays to solve the equation
dx=Ax+Bu, which is stored in the temporary variable tempX before being
assigned into the discrete state vector x.
#define MDL_UPDATE
/* Function: mdlUpdate ======================================================
* Abstract:
* xdot = Ax + Bu
*/
static void mdlUpdate(SimStruct *S, int_T tid)
{
real_T tempX[2] = {0.0, 0.0};
real_T *x = ssGetRealDiscStates(S);
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
7-75
7 Implementing Block Features
UNUSED_ARG(tid); /* not used in single tasking mode */
/* xdot=Ax+Bu */
tempX[0]=A[0][0]*x[0]+A[0][1]*x[1]+B[0][0]*U(0)+B[0][1]*U(1);
tempX[1]=A[1][0]*x[0]+A[1][1]*x[1]+B[1][0]*U(0)+B[1][1]*U(1);
x[0]=tempX[0];
x[1]=tempX[1];
}
Simulink requires the S-function to contain an mdlTerminate function. In
this example, the function is empty.
/* Function: mdlTerminate =====================================================
* Abstract:
* No termination needed, but we are required to have this routine.
*/
static void mdlTerminate(SimStruct *S)
{
UNUSED_ARG(S); /* unused input argument */
}
The required S-function trailer includes the files necessary for simulation or
code generation, as follows.
#ifdef MATLAB_MEX_FILE /* Is this file being compiled as a MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration function */
#endif
Note The mdlOutputs and mdlTerminate functions use the
UNUSED_ARG macro to indicate that an input argument the
callback requires is not used. This optional macro is defined in
matlabroot/simulink/include/simstruc_types.h. If used, you must call
this macro once for each input argument that a callback does not use.
7-76
S-Function Examples
Continuous and Discrete States
The matlabroot/simulink/src/mixedm.c example shows a hybrid (a
combination of continuous and discrete states) system. The mixedm.c example
combines elements of csfunc.c and dsfunc.c. The following Simulink model
uses this S-function.
matlabroot/toolbox/simulink/simdemos/simfeatures/sfcndemo_mixedm.mdl
If you have a hybrid system, the mdlDerivatives method calculates the
derivatives of the continuous states of the state vector, x, and the mdlUpdate
method contains the equations used to update the discrete state vector, xD.
The mdlOutputs method computes the S-function outputs after checking for
sample hits to determine at what point the S-function is being called.
In Simulink block diagram form, the S-function mixedm.c looks like
which implements a continuous integrator followed by a discrete unit delay.
matlabroot/simulink/src/mixedm.c
The S-function begins with #define statements for the S-functions name and
level, along with a #include statement for the simstruc.h header. After
these statements, the S-function can include or define any other necessary
headers, data, etc. The mixedm.c example defines U as a pointer to the first
input ports signal.
/* File : mixedm.c
* Abstract:
*
* An example S-function illustrating multiple sample times by implementing
* integrator -> ZOH(Ts=1second) -> UnitDelay(Ts=1second)
* with an initial condition of 1.
* (e.g. an integrator followed by unit delay operation).
*
* For more details about S-functions, see simulink/src/sfuntmpl_doc.c
*
7-77
7 Implementing Block Features
* Copyright 1990-2007 The MathWorks, Inc.
*/
#define S_FUNCTION_NAME mixedm
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
#define U(element) (*uPtrs[element]) /* Pointer to Input Port0 */
The required S-function method mdlInitializeSizes then sets up the
following S-function characteristics.
ssSetNumSFcnParams sets the number of expected S-function dialog
parameters to zero.
ssGetSFcnParamsCount determines how many parameters the user actually
entered into the S-function dialog. If the number of user-specified
parameters does not match the number returned by ssGetNumSFcnParams,
the S-function errors out.
If the S-function parameter count passes, mdlInitializeSizes next sets
the number of continuous and discrete states using ssSetNumContStates
and ssSetNumDiscStates, respectively. This example has one continuous
state and one discrete state.
The S-function initializes one floating-point work vector by passing a value
of 1 to ssSetNumRWork. No other work vectors are initialized.
Next, the method uses ssSetNumInputPorts and ssSetNumOutputPorts
to configure the S-function to have a single input and output port,
each with a width of one. The method passes a value of 1 to
ssSetInputPortDirectFeedThrough to indicate the input port has direct
feedthrough.
This S-function assigns sample times using a hybrid block-based and
port-based method. The macro ssSetNumSampleTimes initializes two
block-based sample times, which the mdlInitializeSampleTimes
function configures later. The macros ssSetInputPortSampleTime and
ssSetInputPortOffsetTime initialize the input port to have a continuous
sample time with an offset of zero. Similarly, ssSetOutputPortSampleTime
7-78
S-Function Examples
and ssSetOutputPortOffsetTime initialize the output port sample time
to 1 with an offset of zero.
Lastly, ssSetOptions sets two S-function options.
SS_OPTION_EXCEPTION_FREE_CODE stipulates that the code is exception free
and SS_OPTION_PORT_SAMPLE_TIMES_ASSIGNED indicates a combination of
block-based and port-based sample times.
The mdlInitializeSizes function for this example is shown below.
*====================*
* S-function methods *
*====================*/
/* Function: mdlInitializeSizes ===============================================
* Abstract:
* The sizes information is used by Simulink to determine the S-function
* block's characteristics (number of inputs, outputs, states, etc.).
*/
static void mdlInitializeSizes(SimStruct *S)
{
ssSetNumSFcnParams(S, 0); /* Number of expected parameters */
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) {
return; /* Parameter mismatch will be reported by Simulink */
}
ssSetNumContStates(S, 1);
ssSetNumDiscStates(S, 1);
ssSetNumRWork(S, 1); /* for zoh output feeding the delay operator */
if (!ssSetNumInputPorts(S, 1)) return;
ssSetInputPortWidth(S, 0, 1);
ssSetInputPortDirectFeedThrough(S, 0, 1);
ssSetInputPortSampleTime(S, 0, CONTINUOUS_SAMPLE_TIME);
ssSetInputPortOffsetTime(S, 0, 0.0);
if (!ssSetNumOutputPorts(S, 1)) return;
ssSetOutputPortWidth(S, 0, 1);
ssSetOutputPortSampleTime(S, 0, 1.0);
ssSetOutputPortOffsetTime(S, 0, 0.0);
7-79
7 Implementing Block Features
ssSetNumSampleTimes(S, 2);
/* Take care when specifying exception free code - see sfuntmpl_doc.c. */
ssSetOptions(S, (SS_OPTION_EXCEPTION_FREE_CODE |
SS_OPTION_PORT_SAMPLE_TIMES_ASSIGNED));
} /* end mdlInitializeSizes */
The required S-function method mdlInitializeSampleTimes specifies the
S-functions block-based sample rates. The first call to ssSetSampleTime
specifies that the first sample rate is continuous, with the subsequent
call to ssSetOffsetTime setting the offset to zero. The second call to this
pair of macros sets the second sample time to 1 with an offset of zero.
The S-functions port-based sample times set in mdlInitializeSizes
must all be registered as a block-based sample time. The call to
ssSetModelReferenceSampleTimeDefaultInheritance tells the solver to
use the default rule to determine if submodels containing this S-function can
inherit their sample times from the parent model.
/* Function: mdlInitializeSampleTimes =========================================
* Abstract:
* Two tasks: One continuous, one with discrete sample time of 1.0.
*/
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, CONTINUOUS_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0.0);
ssSetSampleTime(S, 1, 1.0);
ssSetOffsetTime(S, 1, 0.0);
ssSetModelReferenceSampleTimeDefaultInheritance(S);
} /* end mdlInitializeSampleTimes */
The optional S-function method mdlInitializeConditions initializes the
continuous and discrete state vectors. The #define statement before this
method is required for Simulink to call this function. In this example,
ssGetContStates obtains a pointer to the continuous state vector and
ssGetRealDiscStates obtains a pointer to the discrete state vector. The
method then sets all states initial conditions to one.
7-80
S-Function Examples
#define MDL_INITIALIZE_CONDITIONS
/* Function: mdlInitializeConditions ==========================================
* Abstract:
* Initialize both continuous states to one.
*/
static void mdlInitializeConditions(SimStruct *S)
{
real_T *xC0 = ssGetContStates(S);
real_T *xD0 = ssGetRealDiscStates(S);
xC0[0] = 1.0;
xD0[0] = 1.0;
} /* end mdlInitializeConditions */
The required mdlOutputs function performs computations based on the
current task. The macro ssIsContinuousTask checks if the continuous task
is executing. If this macro returns true, ssIsSpecialSampleHit then checks
if the discrete sample rate is also executing. If this macro also returns
true, the method sets the value of the floating-point work vector to the
current value of the continuous state, via pointers obtained using ssGetRWork
and ssGetContStates, respectively. The mdlUpdate method later uses the
floating-point work vector as the input to the zero-order hold. Updating the
work vector in mdlOutputs ensures that the correct values are available
during subsequent calls to mdlUpdate. Finally, if the S-function is running
at its discrete rate, i.e., the call to ssIsSampleHit returns true, the method
sets the output to the value of the discrete state.
/* Function: mdlOutputs =======================================================
* Abstract:
* y = xD, and update the zoh internal output.
*/
static void mdlOutputs(SimStruct *S, int_T tid)
{
/* update the internal "zoh" output */
if (ssIsContinuousTask(S, tid)) {
if (ssIsSpecialSampleHit(S, 1, 0, tid)) {
real_T *zoh = ssGetRWork(S);
real_T *xC = ssGetContStates(S);
*zoh = *xC;
7-81
7 Implementing Block Features
}
}
/* y=xD */
if (ssIsSampleHit(S, 1, tid)) {
real_T *y = ssGetOutputPortRealSignal(S,0);
real_T *xD = ssGetRealDiscStates(S);
y[0]=xD[0];
}
} /* end mdlOutputs */
Simulink calls the mdlUpdate function once every major integration time
step to update the discrete states values. Because this function is an
optional method, a #define statement must precede the function. The call
to ssIsSampleHit ensures the body of the method is executed only when
the S-function is operating at its discrete rate. If ssIsSampleHit returns
true, the method obtains pointers to the S-functions discrete state and
floating-point work vector and updates the discrete states value using the
value stored in the work vector.
#define MDL_UPDATE
/* Function: mdlUpdate ======================================================
* Abstract:
* xD = xC
*/
static void mdlUpdate(SimStruct *S, int_T tid)
{
UNUSED_ARG(tid); /* not used in single tasking mode */
/* xD=xC */
if (ssIsSampleHit(S, 1, tid)) {
real_T *xD = ssGetRealDiscStates(S);
real_T *zoh = ssGetRWork(S);
xD[0]=*zoh;
}
} /* end mdlUpdate */
7-82
S-Function Examples
The mdlDerivatives function calculates the continuous state derivatives.
Because this function is an optional method, a #define statement must
precede the function. The function obtains pointers to the S-functions
continuous state derivative and first input port then sets the continuous state
derivative equal to the value of the first input.
#define MDL_DERIVATIVES
/* Function: mdlDerivatives =================================================
* Abstract:
* xdot = U
*/
static void mdlDerivatives(SimStruct *S)
{
real_T *dx = ssGetdX(S);
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
/* xdot=U */
dx[0]=U(0);
} /* end mdlDerivatives */
Simulink requires the S-function to contain an mdlTerminate function. In
this example, the function is empty.
/* Function: mdlTerminate =====================================================
* Abstract:
* No termination needed, but we are required to have this routine.
*/
static void mdlTerminate(SimStruct *S)
{
UNUSED_ARG(S); /* unused input argument */
}
The S-function trailer includes the files necessary for simulation or code
generation, as follows.
#ifdef MATLAB_MEX_FILE /* Is this file being compiled as a MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration function */
#endif
7-83
7 Implementing Block Features
Note The mdlUpdate and mdlTerminate functions use the
UNUSED_ARG macro to indicate that an input argument the
callback requires is not used. This optional macro is defined in
matlabroot/simulink/include/simstruc_types.h. If used, you must call
this macro once for each input argument that a callback does not use.
Variable Sample Time
The example S-function matlabroot/simulink/src/vsfunc.c uses a
variable-step sample time. The following Simulink model uses this S-function.
matlabroot/toolbox/simulink/simdemos/simfeatures/sfcndemo_vsfunc.mdl
Variable step-size functions require a call to mdlGetTimeOfNextVarHit, which
is an S-function routine that calculates the time of the next sample hit.
S-functions that use the variable-step sample time can be used only with
variable-step solvers. The vsfunc.c example is a discrete S-function that
delays its first input by an amount of time determined by the second input.
The vsfunc.c example outputs the input u delayed by a variable amount
of time. mdlOutputs sets the output y equal to state x. mdlUpdate
sets the state vector x equal to u, the input vector. This example calls
mdlGetTimeOfNextVarHit to calculate and set the time of the next sample hit,
that is, the time when vsfunc.c is next called. In mdlGetTimeOfNextVarHit,
the macro ssGetInputPortRealSignalPtrs gets a pointer to the input u. Then
this call is made:
ssSetTNext(S, ssGetT(S)(*u[1]));
The macro ssGetT gets the simulation time t. The second input to the block,
(*u[1]), is added to t, and the macro ssSetTNext sets the time of the next hit
equal to t+(*u[1]), delaying the output by the amount of time set in (*u[1]).
matlabroot/simulink/src/vsfunc.c
The S-function begins with #define statements for the S-functions name and
level, along with a #include statement for the simstruc.h header. After
these statements, the S-function can include or define any other necessary
7-84
S-Function Examples
headers, data, etc. The vsfunc.c example defines U as a pointer to the first
input ports signal.
/* File : vsfunc.c
* Abstract:
*
* Variable step S-function example.
* This example S-function illustrates how to create a variable step
* block in Simulink. This block implements a variable step delay
* in which the first input is delayed by an amount of time determined
* by the second input:
*
* dt = u(2)
* y(t+dt) = u(t)
*
* For more details about S-functions, see simulink/src/sfuntmpl_doc.c.
*
* Copyright 1990-2007 The MathWorks, Inc.
*/
#define S_FUNCTION_NAME vsfunc
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
#define U(element) (*uPtrs[element]) /* Pointer to Input Port0 */
The required S-function method mdlInitializeSizes then sets up the
following S-function characteristics.
ssSetNumSFcnParams sets the number of expected S-function dialog
parameters to zero.
ssGetSFcnParamsCount determines how many parameters the user actually
entered into the S-function dialog. If the number of user-specified
parameters does not match the number returned by ssGetNumSFcnParams,
the S-function errors out.
If the S-function parameter count passes, mdlInitializeSizes next sets
the number of continuous and discrete states using ssSetNumContStates
7-85
7 Implementing Block Features
and ssSetNumDiscStates, respectively. This example has no continuous
states and one discrete state.
Next, the method uses ssSetNumInputPorts and ssSetNumOutputPorts to
configure the S-function to have a single input and output port. Calls
to ssSetInputPortWidth and ssSetOutputPortWidth assign widths
to these input and output ports. The method passes a value of 1 to
ssSetInputPortDirectFeedThrough to indicate the input port has direct
feedthrough.
ssSetNumSampleTimes then initializes one sample time, which the
mdlInitializeSampleTimes function configures later.
The S-function indicates that no work vectors are used by passing a value
of 0 to ssSetNumRWork, ssSetNumIWork, etc. These lines could be omitted
because zero is the default value for all of these macros. However, for
clarity, the S-function explicitly sets the number of work vectors.
Next, ssGetSimMode checks if the S-function is being run in a simulation or
with Real-Time Workshop. If ssGetSimMode returns SS_SIMMODE_RTWGEN
and ssIsVariableStepSolver returns false, indicating use with Real-Time
Workshop and a fixed-step solver, then the S-function errors out.
Lastly, ssSetOptions sets any applicable options. In this case, the only
option is SS_OPTION_EXCEPTION_FREE_CODE, which stipulates that the
code is exception free.
The mdlInitializeSizes function for this example is shown below.
/* Function: mdlInitializeSizes ===============================================
* Abstract:
* The sizes information is used by Simulink to determine the S-function
* block's characteristics (number of inputs, outputs, states, etc.).
*/
static void mdlInitializeSizes(SimStruct *S)
{
ssSetNumSFcnParams(S, 0); /* Number of expected parameters */
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) {
return; /* Parameter mismatch will be reported by Simulink */
}
ssSetNumContStates(S, 0);
ssSetNumDiscStates(S, 1);
7-86
S-Function Examples
if (!ssSetNumInputPorts(S, 1)) return;
ssSetInputPortWidth(S, 0, 2);
ssSetInputPortDirectFeedThrough(S, 0, 1);
if (!ssSetNumOutputPorts(S, 1)) return;
ssSetOutputPortWidth(S, 0, 1);
ssSetNumSampleTimes(S, 1);
ssSetNumRWork(S, 0);
ssSetNumIWork(S, 0);
ssSetNumPWork(S, 0);
ssSetNumModes(S, 0);
ssSetNumNonsampledZCs(S, 0);
if (ssGetSimMode(S) == SS_SIMMODE_RTWGEN && !ssIsVariableStepSolver(S)) {
ssSetErrorStatus(S, "S-function vsfunc.c cannot be used with RTW "
"and Fixed-Step Solvers because it contains variable"
" sample time");
}
/* Take care when specifying exception free code - see sfuntmpl_doc.c */
ssSetOptions(S, SS_OPTION_EXCEPTION_FREE_CODE);
}
The required S-function method mdlInitializeSampleTimes specifies the
S-functions sample rates. The input argument VARIABLE_SAMPLE_TIME
passed to ssSetSampleTime specifies that this S-function has a variable-step
sample time and ssSetOffsetTime specifies an offset time of zero. The call to
ssSetModelReferenceSampleTimeDefaultInheritance tells the solver to
use the default rule to determine if submodels containing this S-function can
inherit their sample times from the parent model. Because the S-function has
a variable-step sample time, vsfunc.c must calculate the time of the next
sample hit in the mdlGetTimeOfNextVarHit method, shown later.
/* Function: mdlInitializeSampleTimes =========================================
* Abstract:
* Variable-Step S-function
*/
static void mdlInitializeSampleTimes(SimStruct *S)
7-87
7 Implementing Block Features
{
ssSetSampleTime(S, 0, VARIABLE_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0.0);
ssSetModelReferenceSampleTimeDefaultInheritance(S);
}
The optional S-function method mdlInitializeConditions initializes
the discrete state vector. The #define statement before this method is
required for Simulink to call this function. In the example, the method uses
ssGetRealDiscStates to obtain a pointer to the discrete state vector and sets
the states initial value to zero.
#define MDL_INITIALIZE_CONDITIONS
/* Function: mdlInitializeConditions ========================================
* Abstract:
* Initialize discrete state to zero.
*/
static void mdlInitializeConditions(SimStruct *S)
{
real_T *x0 = ssGetRealDiscStates(S);
x0[0] = 0.0;
}
The optional mdlGetTimeOfNextVarHit method calculates the time of the
next sample hit. Because this method is optional, a #define statement
precedes it. First, this method obtains a pointer to the first input ports signal
using ssGetInputPortRealSignalPtrs. If the input signals second element is
positive, the macro ssGetT gets the simulation time t. The macro ssSetTNext
sets the time of the next hit equal to t+(*U[1]), delaying the output by the
amount of time specified by the inputs second element (*U[1]).
#define MDL_GET_TIME_OF_NEXT_VAR_HIT
static void mdlGetTimeOfNextVarHit(SimStruct *S)
{
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
/* Make sure input will increase time */
if (U(1) <= 0.0) {
/* If not, abort simulation */
7-88
S-Function Examples
ssSetErrorStatus(S,"Variable step control input must be "
"greater than zero");
return;
}
ssSetTNext(S, ssGetT(S)+U(1));
}
The required mdlOutputs function computes the S-functions output signal.
The function obtains pointers to the first output port and discrete state and
then assigns the states current value to the output.
/* Function: mdlOutputs =======================================================
* Abstract:
* y = x
*/
static void mdlOutputs(SimStruct *S, int_T tid)
{
real_T *y = ssGetOutputPortRealSignal(S,0);
real_T *x = ssGetRealDiscStates(S);
/* Return the current state as the output */
y[0] = x[0];
}
The mdlUpdate function updates the discrete states value. Because this
method is optional, a #define statement precedes it. The function first
obtains pointers to the S-functions discrete state and first input port then
assigns the value of the first element of the first input port signal to the state.
#define MDL_UPDATE
/* Function: mdlUpdate ========================================================
* Abstract:
* This function is called once for every major integration time step.
* Discrete states are typically updated here, but this function is useful
* for performing any tasks that should only take place once per integration
* step.
*/
static void mdlUpdate(SimStruct *S, int_T tid)
{
real_T *x = ssGetRealDiscStates(S);
7-89
7 Implementing Block Features
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
x[0]=U(0);
}
Simulink requires the S-functions to contain an mdlTerminate function. In
this example, the function is empty.
/* Function: mdlTerminate =====================================================
* Abstract:
* No termination needed, but we are required to have this routine.
*/
static void mdlTerminate(SimStruct *S)
{
}
The required S-function trailer includes the files necessary for simulation or
code generation, as follows.
#ifdef MATLAB_MEX_FILE /* Is this file being compiled as a MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration function */
#endif
Array Inputs and Outputs
The example S-function matlabroot/simulink/src/sfun_matadd.c
demonstrates how to implement a matrix addition block. The following
Simulink model uses this S-function.
matlabroot/toolbox/simulink/simdemos/simfeatures/sfcndemo_matadd.mdl
The S-function adds signals of various dimensions to a parameter value
entered in the S-function. The S-function accepts and outputs 2-D or n-D
signals.
7-90
S-Function Examples
matlabroot/simulink/src/sfun_matadd.c
The S-function begins with #define statements for the S-functions name and
level, along with a #include statement for the simstruc.h header. After
these statements, the S-function includes or defines any other necessary
headers, data, etc. This example defines additional variables for the number of
S-function parameters, the S-function parameter value, and the flag EDIT_OK
that indicates if the parameter value can be edited during simulation.
/* SFUN_MATADD matrix support example.
* C-MEX S-function for matrix addition with one input port,
* one output port, and one parameter.
*
* Input Signal: 2-D or n-D array
* Parameter: 2-D or n-D array
* Output Signal: 2-D or n-D array
*
* Input parameter output
* --------------------------------
* scalar scalar scalar
* scalar matrix matrix (input scalar expansion)
* matrix scalar matrix (parameter scalar expansion)
* matrix matrix matrix
*
* Copyright 1990-2007 The MathWorks, Inc.
*/
#define S_FUNCTION_NAME sfun_matadd
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
enum {PARAM = 0, NUM_PARAMS};
#define PARAM_ARG ssGetSFcnParam(S, PARAM)
#define EDIT_OK(S, ARG) \
(!((ssGetSimMode(S) == SS_SIMMODE_SIZES_CALL_ONLY) \
&& mxIsEmpty(ARG)))
7-91
7 Implementing Block Features
The S-function next implements the mdlCheckParameters method to validate
the S-function dialog parameters. The #ifdef statement checks that the
S-function is compiled as a MEX-file, instead of for use with Real-Time
Workshop. Because mdlCheckParameters is optional, the S-function code
contains a #define statement to register the method. The body of the function
checks that the S-function parameter value is not empty. If the parameter
check fails, the S-function errors out with a call to ssSetErrorStatus.
#ifdef MATLAB_MEX_FILE
#define MDL_CHECK_PARAMETERS
/* Function: mdlCheckParameters ================================
* Abstract:
* Verify parameter settings.
*/
static void mdlCheckParameters(SimStruct *S)
{
if(EDIT_OK(S, PARAM_ARG)){
/* Check that parameter value is not empty*/
if( mxIsEmpty(PARAM_ARG) ) {
ssSetErrorStatus(S, "Invalid parameter specified. The"
"parameter must be non-empty");
return;
}
}
} /* end mdlCheckParameters */
#endif
The required S-function method mdlInitializeSizes then sets up the
following S-function characteristics.
ssSetNumSFcnParams sets the number of expected S-function dialog
parameters to one, as defined by the variable NUM_PARAMS.
If this S-function is compiled as a MEX-file, ssGetSFcnParamsCount
determines how many parameters the user actually entered into
the S-function dialog. If the number of user-specified parameters
matches the number returned by ssGetNumSFcnParams, the method calls
mdlCheckParameters to validate the user-entered data. Otherwise, the
S-function errors out.
7-92
S-Function Examples
If the parameter check passes, the S-function specifies that all S-function
parameters are tunable using ssSetSFcnParamTunable.
The S-function then invokes ssAllowSignalsWithMoreThan2D to allow the
S-function to accept n-D signals.
Next, ssSetNumOutputPorts and ssSetNumInputPorts specify that the
S-function has a single output port and a single input port.
The S-function uses ssSetInputPortDimensionInfo to specify that the
input port is dynamically sized. In this case, the S-function needs to
implement an mdlSetInputPortDimensionInfo method to set the actual
input dimension.
The output dimensions depend on the dimensions of the
S-function parameter. If the parameter is a scalar, the call to
ssSetOutputPortDimensionInfo specifies that the output port dimensions
are dynamically sized. If the parameter is a matrix, the output port
dimensions are initialized to the dimensions of the S-function parameter.
In this case, the macro DECL_AND_INIT_DIMSINFO initializes a dimsInfo
structure. The S-function assigns the width, size, and dimensions of the
S-function parameter into the dimsInfo structure and then passes this
structure to ssSetOutputPortDimensionInfo to set the output port
dimensions accordingly.
The S-function specifies that the input port has direct feedthrough by
passing a value of 1 to ssSetInputPortDirectFeedThrough.
ssSetNumSampleTimes initializes one sample time, to be configured later in
the mdlInitializeSampleTimes method.
Lastly, ssSetOptions sets any applicable options. In this case,
SS_OPTION_EXCEPTION_FREE_CODE stipulates that the code is exception free
and SS_OPTION_WORKS_WITH_CODE_REUSE signifies that this S-function is
compatible with the subsystem code reuse feature of Real-Time Workshop.
/* Function: mdlInitializeSizes ================================
* Abstract:
* Initialize the sizes array
*/
static void mdlInitializeSizes(SimStruct *S)
{
ssSetNumSFcnParams(S, NUM_PARAMS);
7-93
7 Implementing Block Features
#if defined(MATLAB_MEX_FILE)
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) {
return; }
mdlCheckParameters(S);
if (ssGetErrorStatus(S) != NULL) return;
#endif
{
int iParam = 0;
int nParam = ssGetNumSFcnParams(S);
for ( iParam = 0; iParam < nParam; iParam++ )
{
ssSetSFcnParamTunable( S, iParam, SS_PRM_TUNABLE );
}
}
/* Allow signal dimensions greater than 2 */
ssAllowSignalsWithMoreThan2D(S);
/* Set number of input and output ports */
if (!ssSetNumInputPorts( S,1)) return;
if (!ssSetNumOutputPorts(S,1)) return;
/* Set dimensions of input and output ports */
{
int_T pWidth = mxGetNumberOfElements(PARAM_ARG);
/* Input can be a scalar or a matrix signal. */
if(!ssSetInputPortDimensionInfo(S,0,DYNAMIC_DIMENSION)) {
return; }
if( pWidth == 1) {
/* Scalar parameter: output dimensions are unknown. */
if(!ssSetOutputPortDimensionInfo(S,0,DYNAMIC_DIMENSION)){
return; }
}
else{
/*
* Non-scalar parameter: output dimensions are the same
7-94
S-Function Examples
* as the parameter dimensions. To support n-D signals,
* must use a dimsInfo structure to specify dimensions.
*/
DECL_AND_INIT_DIMSINFO(di); /*Initializes structure*/
int_T pSize = mxGetNumberOfDimensions(PARAM_ARG);
const int_T *pDims = mxGetDimensions(PARAM_ARG);
di.width = pWidth;
di.numDims = pSize;
di.dims = pDims;
if(!ssSetOutputPortDimensionInfo(S, 0, &di)) return;
}
}
ssSetInputPortDirectFeedThrough(S, 0, 1);
ssSetNumSampleTimes(S, 1);
ssSetOptions(S,
SS_OPTION_WORKS_WITH_CODE_REUSE |
SS_OPTION_EXCEPTION_FREE_CODE);
} /* end mdlInitializeSizes */
The required S-function method mdlInitializeSampleTimes specifies
the S-functions sample rates. To specify that this S-function inherits its
sample time from its driving block, the S-function calls ssSetSampleTime
with the input argument INHERITED_SAMPLE_TIME. The call to
ssSetModelReferenceSampleTimeDefaultInheritance tells the solver to use the
default rule to determine if submodels containing this S-function can inherit
their sample times from the parent model.
/* Function: mdlInitializeSampleTimes ==========================
* Abstract:
* Initialize the sample times array.
*/
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, INHERITED_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0.0);
ssSetModelReferenceSampleTimeDefaultInheritance(S);
} /* end mdlInitializeSampleTimes */
7-95
7 Implementing Block Features
The S-function calls the mdlSetWorkWidths method to register its run-time
parameters. Because mdlSetWorkWidths is an optional method, a #define
statement precedes it. The method first initializes a name for the run-time
parameter and then uses ssRegAllTunableParamsAsRunTimeParams to
register the run-time parameter.
/* Function: mdlSetWorkWidths ==================================
* Abstract:
* Set up run-time parameter.
*/
#define MDL_SET_WORK_WIDTHS
static void mdlSetWorkWidths(SimStruct *S)
{
const char_T *rtParamNames[] = {"Operand"};
ssRegAllTunableParamsAsRunTimeParams(S, rtParamNames);
} /* end mdlSetWorkWidths */
The S-functions mdlOutputs method uses a for loop to calculate the output
as the sum of the input and S-function parameter. The S-function handles
n-D arrays of data using a single index into the array.
/* Function: mdlOutputs ========================================
* Abstract:
* Compute the outputs of the S-function.
*/
static void mdlOutputs(SimStruct *S, int_T tid)
{
InputRealPtrsType uPtr = ssGetInputPortRealSignalPtrs(S,0);
real_T *y = ssGetOutputPortRealSignal(S,0);
const real_T *p = mxGetPr(PARAM_ARG);
int_T uWidth = ssGetInputPortWidth(S,0);
int_T pWidth = mxGetNumberOfElements(PARAM_ARG);
int_T yWidth = ssGetOutputPortWidth(S,0);
int i;
UNUSED_ARG(tid); /* not used in single tasking mode */
/*
* Note1: Matrix signals are stored in column major order.
* Note2: Access each matrix element by one index not two
7-96
S-Function Examples
* indices. For example, if the output signal is a
* [2x2] matrix signal,
* - -
* | y[0] y[2] |
* | y[1] y[3] |
* - -
* Output elements are stored as follows:
* y[0] --> row = 0, col = 0
* y[1] --> row = 1, col = 0
* y[2] --> row = 0, col = 1
* y[3] --> row = 1, col = 1
*/
for (i = 0; i < yWidth; i++) {
int_T uIdx = (uWidth == 1) ? 0 : i;
int_T pIdx = (pWidth == 1) ? 0 : i;
y[i] = *uPtr[uIdx] + p[pIdx];
}
} /* end mdlOutputs */
During signal propagation, the S-function calls the optional
mdlSetInputPortDimensionInfo method with the candidate input
port dimensions stored in dimsInfo. The #if defined statement
checks that the S-function is compiled as a MEX-file. Because
mdlSetInputPortDimensionInfo is an optional method, a #define statement
precedes it. In mdlSetInputPortDimensionInfo, the S-function uses
ssSetInputPortDimensionInfo to set the dimensions of the input port to the
candidate dimensions. If the call to this macro succeeds, the S-function further
checks the candidate dimensions to ensure that the input signal is either a
2-D scalar or a matrix. If this condition is met and the output port dimensions
are still dynamically sized, the S-function calls ssSetOutputPortDimensionInfo
to set the dimension of the output port to the same candidate dimensions.
The ssSetOutputPortDimensionInfo macro cannot modify the output port
dimensions if they are already specified.
#if defined(MATLAB_MEX_FILE)
#define MDL_SET_INPUT_PORT_DIMENSION_INFO
/* Function: mdlSetInputPortDimensionInfo ======================
* Abstract:
7-97
7 Implementing Block Features
* This routine is called with the candidate dimensions for
* an input port with unknown dimensions. If the proposed
* dimensions are acceptable, the routine should go ahead and
* set the actual port dimensions. If they are unacceptable
* an error should be generated via ssSetErrorStatus.
* Note that any other input or output ports whose dimensions
* are implicitly defined by virtue of knowing the dimensions
* of the given port can also have their dimensions set.
*/
static void mdlSetInputPortDimensionInfo(SimStruct *S,
int_T port,
const DimsInfo_T *dimsInfo)
{
int_T pWidth = mxGetNumberOfElements(PARAM_ARG);
int_T pSize = mxGetNumberOfDimensions(PARAM_ARG);
const int_T *pDims = mxGetDimensions(PARAM_ARG);
int_T uNumDims = dimsInfo->numDims;
int_T uWidth = dimsInfo->width;
int_T *uDims = dimsInfo->dims;
int_T numDims;
boolean_T isOk = true;
int iParam = 0;
int_T outWidth = ssGetOutputPortWidth(S, 0);
/* Set input port dimension */
if(!ssSetInputPortDimensionInfo(S, port, dimsInfo)) return;
/*
* The block only accepts 2-D or higher signals. Check
* number of dimensions. If the parameter and the input
* signal are non-scalar, their dimensions must be the same.
*/
isOk = (uNumDims >= 2) && (pWidth == 1 || uWidth == 1 ||
pWidth == uWidth);
numDims = (pSize != uNumDims) ? numDims : uNumDims;
if(isOk && pWidth > 1 && uWidth > 1){
for ( iParam = 0; iParam < numDims; iParam++ ) {
7-98
S-Function Examples
isOk = (pDims[iParam] == uDims[iParam]);
if(!isOk) break;
}
}
if(!isOk){
ssSetErrorStatus(S,"Invalid input port dimensions. The "
"input signal must be a 2-D scalar signal, or it must "
"be a matrix with the same dimensions as the parameter "
"dimensions.");
return;
}
/* Set the output port dimensions */
if (outWidth == DYNAMICALLY_SIZED){
if(!ssSetOutputPortDimensionInfo(S,port,dimsInfo)) return;
}
} /* end mdlSetInputPortDimensionInfo */
During signal propagation, if any output ports have unknown dimensions,
the S-function calls the optional mdlSetOutputPortDimensionInfo
method. Because this method is optional, a #define statement
precedes it. In mdlSetOutputPortDimensionInfo, the S-function uses
ssSetOutputPortDimensionInfo to set the dimensions of the output port to
the candidate dimensions dimsInfo. If the call to this macro succeeds, the
S-function further checks the candidate dimensions to ensure that the input
signal is either a 2-D or n-D matrix. If this condition is not met, the S-function
errors out with a call to ssSetErrorStatus. Otherwise, the S-function calls
ssSetInputPortDimensionInfo to set the dimension of the input port to the
same candidate dimensions.
# define MDL_SET_OUTPUT_PORT_DIMENSION_INFO
/* Function: mdlSetOutputPortDimensionInfo =====================
* Abstract:
* This routine is called with the candidate dimensions for
* an output port with unknown dimensions. If the proposed
* dimensions are acceptable, the routine should go ahead and
* set the actual port dimensions. If they are unacceptable
* an error should be generated via ssSetErrorStatus.
* Note that any other input or output ports whose dimensions
7-99
7 Implementing Block Features
* are implicitly defined by virtue of knowing the dimensions
* of the given port can also have their dimensions set.
*/
static void mdlSetOutputPortDimensionInfo(SimStruct *S,
int_T port,
const DimsInfo_T *dimsInfo)
{
/*
* If the block has scalar parameter, the output dimensions
* are unknown. Set the input and output port to have the
* same dimensions.
*/
if(!ssSetOutputPortDimensionInfo(S, port, dimsInfo)) return;
/* The block only accepts 2-D or n-D signals.
* Check number of dimensions.
*/
if (!(dimsInfo->numDims >= 2)){
ssSetErrorStatus(S, "Invalid output port dimensions. "
"The output signal must be a 2-D or n-D array (matrix) "
"signal.");
return;
}else{
/* Set the input port dimensions */
if(!ssSetInputPortDimensionInfo(S,port,dimsInfo)) return;
}
} /* end mdlSetOutputPortDimensionInfo */
Because the S-function has ports that are dynamically sized, it must
provide an mdlSetDefaultPortDimensionInfo method. Simulink invokes
this method during signal propagation when it cannot determine the
dimensionality of the signal connected to the blocks input port. This situation
can happen, for example, if the input port is unconnected. In this example,
the mdlSetDefaultPortDimensionInfo method sets the input and output
ports dimensions to a scalar.
# define MDL_SET_DEFAULT_PORT_DIMENSION_INFO
/* Function: mdlSetDefaultPortDimensionInfo ====================
* This routine is called when Simulink is not able to find
* dimension candidates for ports with unknown dimensions.
7-100
S-Function Examples
* This function must set the dimensions of all ports with
* unknown dimensions.
*/
static void mdlSetDefaultPortDimensionInfo(SimStruct *S)
{
int_T outWidth = ssGetOutputPortWidth(S, 0);
/* Input port dimension must be unknown. Set it to scalar.*/
if(!ssSetInputPortMatrixDimensions(S, 0, 1, 1)) return;
if(outWidth == DYNAMICALLY_SIZED){
/* Output dimensions are unknown. Set it to scalar. */
if(!ssSetOutputPortMatrixDimensions(S, 0, 1, 1)) return;
}
} /* end mdlSetDefaultPortDimensionInfo */
#endif
The S-function concludes with the required mdlTerminate function. In this
example, the function is empty.
/* Function: mdlTerminate ======================================
* Abstract:
* Called when the simulation is terminated.
*/
static void mdlTerminate(SimStruct *S)
{
UNUSED_ARG(S); /* unused input argument */
} /* end mdlTerminate */
The required S-functions trailer includes the files necessary for simulation or
code generation.
#ifdef MATLAB_MEX_FILE
#include "simulink.c"
#else
#include "cg_sfun.h"
#endif
/* [EOF] sfun_matadd.c */
7-101
7 Implementing Block Features
Note The mdlOutputs and mdlTerminate functions use the
UNUSED_ARG macro to indicate that an input argument the
callback requires is not used. This optional macro is defined in
matlabroot/simulink/include/simstruc_types.h. You must call this
macro once for each input argument that a callback does not use.
Zero-Crossing Detection
The example S-function matlabroot/simulink/src/sfun_zc_sat.c
demonstrates how to implement a Saturation block. The following Simulink
model uses this S-function.
matlabroot/toolbox/simulink/simdemos/simfeatures/-
sfcndemo_sfun_zc_sat.mdl
The S-function works with either fixed- or variable-step solvers. When
this S-function inherits a continuous sample time and uses a variable-step
solver, it uses a zero-crossings algorithm to locate the exact points at which
the saturation occurs.
matlabroot/simulink/src/sfun_zc_sat.c
The S-function begins with #define statements for the S-functions name and
level, along with a #include statement for the simstruc.h header. After
these statements, the S-function includes or defines any other necessary
headers, data, etc. This example defines various parameters associated with
the upper and lower saturation bounds.
/* File : sfun_zc_sat.c
* Abstract:
*
* Example of an S-function which has nonsampled zero crossings to
* implement a saturation function. This S-function is designed to be
* used with a variable or fixed step solver.
*
* A saturation is described by three equations
*
* (1) y = UpperLimit
* (2) y = u
7-102
S-Function Examples
* (3) y = LowerLimit
*
* and a set of inequalities that specify which equation to use
*
* if UpperLimit < u then use (1)
* if LowerLimit <= u <= UpperLimit then use (2)
* if u < LowerLimit then use (3)
*
* A key fact is that the valid equation 1, 2, or 3, can change at
* any instant. Nonsampled zero crossing support helps the variable step
* solvers locate the exact instants when behavior switches from one equation
* to another.
*
* Copyright 1990-2007 The MathWorks, Inc.
*/
#define S_FUNCTION_NAME sfun_zc_sat
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
/*========================*
* General Defines/macros *
*========================*/
/* index to Upper Limit */
#define I_PAR_UPPER_LIMIT 0
/* index to Lower Limit */
#define I_PAR_LOWER_LIMIT 1
/* total number of block parameters */
#define N_PAR 2
/*
* Make access to mxArray pointers for parameters more readable.
*/
#define P_PAR_UPPER_LIMIT ( ssGetSFcnParam(S,I_PAR_UPPER_LIMIT) )
#define P_PAR_LOWER_LIMIT ( ssGetSFcnParam(S,I_PAR_LOWER_LIMIT) )
7-103
7 Implementing Block Features
This S-function next implements the mdlCheckParameters method to check
the validity of the S-function dialog parameters. Because this method is
optional, a #define statement precedes it. The #if defined statement
checks that this function is compiled as a MEX-file, instead of for use with
Real-Time Workshop. The body of the function performs basic checks to
ensure that the user entered real vectors of equal length for the upper and
lower saturation limits. If the parameter checks fail, the S-function errors out.
#define MDL_CHECK_PARAMETERS
#if defined(MDL_CHECK_PARAMETERS) && defined(MATLAB_MEX_FILE)
/* Function: mdlCheckParameters =============================================
* Abstract:
* Check that parameter choices are allowable.
*/
static void mdlCheckParameters(SimStruct *S)
{
int_T i;
int_T numUpperLimit;
int_T numLowerLimit;
const char *msg = NULL;
/*
* check parameter basics
*/
for ( i = 0; i < N_PAR; i++ ) {
if ( mxIsEmpty( ssGetSFcnParam(S,i) ) ||
mxIsSparse( ssGetSFcnParam(S,i) ) ||
mxIsComplex( ssGetSFcnParam(S,i) ) ||
!mxIsNumeric( ssGetSFcnParam(S,i) ) ) {
msg = "Parameters must be real vectors.";
goto EXIT_POINT;
}
}
/*
* Check sizes of parameters.
*/
numUpperLimit = mxGetNumberOfElements( P_PAR_UPPER_LIMIT );
7-104
S-Function Examples
numLowerLimit = mxGetNumberOfElements( P_PAR_LOWER_LIMIT );
if ( ( numUpperLimit != 1 ) &&
( numLowerLimit != 1 ) &&
( numUpperLimit != numLowerLimit ) ) {
msg = "Number of input and output values must be equal.";
goto EXIT_POINT;
}
/*
* Error exit point
*/
EXIT_POINT:
if (msg != NULL) {
ssSetErrorStatus(S, msg);
}
}
#endif /* MDL_CHECK_PARAMETERS */
The required S-function method mdlInitializeSizes sets up the following
S-function characteristics.
ssSetNumSFcnParams sets the number of expected S-function dialog
parameters to two, as defined previously in the variable N_PAR.
If this method is compiled as a MEX-file, ssGetSFcnParamsCount determines
how many parameters the user actually entered into the S-function dialog.
If the number of user-specified parameters matches the number returned
by ssGetNumSFcnParams, the method calls mdlCheckParameters to check the
validity of the user-entered data. Otherwise, the S-function errors out.
If the parameter check passes, the S-function determines the maximum
number of elements entered into either the upper or lower saturation limit
parameter. This number is needed later to determine the appropriate
output width.
Next, the number of continuous and discrete states is set using
ssSetNumContStates and ssSetNumDiscStates, respectively. This example
has no continuous or discrete states.
The method specifies that the S-function has a single output port
using ssSetNumOutputPorts and sets the width of this output port
7-105
7 Implementing Block Features
using ssSetOutputPortWidth. The output port width is either the
maximum number of elements in the upper or lower saturation limit
or is dynamically sized. Similar code specifies a single input port and
indicates the input port has direct feedthrough by passing a value of 1 to
ssSetInputPortDirectFeedThrough.
ssSetNumSampleTimes initializes one sample time, which the
mdlInitializeSampleTimes function configures later.
The S-function indicates that no work vectors are used by passing a value
of 0 to ssSetNumRWork, ssSetNumIWork, etc. These lines could be omitted
because zero is the default value for all of these macros. However, for
clarity, the S-function explicitly sets the number of work vectors.
The method initializes the zero-crossing detection work vectors using
ssSetNumModes and ssSetNumNonsampledZCs. The mdlSetWorkWidths method
specifies the length of these dynamically sized vectors later.
Lastly, ssSetOptions sets any applicable options. In this case,
SS_OPTION_EXCEPTION_FREE_CODE stipulates that the code is exception free
and SS_OPTION_ALLOW_INPUT_SCALAR_EXPANSION permits scalar expansion
of the input without having to provide an mdlSetInputPortWidth function.
The mdlInitializeSizes function for this example is shown below.
/* Function: mdlInitializeSizes ===============================================
* Abstract:
* Initialize the sizes array.
*/
static void mdlInitializeSizes(SimStruct *S)
{
int_T numUpperLimit, numLowerLimit, maxNumLimit;
/*
* Set and Check parameter count
*/
ssSetNumSFcnParams(S, N_PAR);
#if defined(MATLAB_MEX_FILE)
if (ssGetNumSFcnParams(S) == ssGetSFcnParamsCount(S)) {
mdlCheckParameters(S);
if (ssGetErrorStatus(S) != NULL) {
7-106
S-Function Examples
return;
}
} else {
return; /* Parameter mismatch will be reported by Simulink */
}
#endif
/*
* Get parameter size info.
*/
numUpperLimit = mxGetNumberOfElements( P_PAR_UPPER_LIMIT );
numLowerLimit = mxGetNumberOfElements( P_PAR_LOWER_LIMIT );
if (numUpperLimit > numLowerLimit) {
maxNumLimit = numUpperLimit;
} else {
maxNumLimit = numLowerLimit;
}
/*
* states
*/
ssSetNumContStates(S, 0);
ssSetNumDiscStates(S, 0);
/*
* outputs
* The upper and lower limits are scalar expanded
* so their size determines the size of the output
* only if at least one of them is not scalar.
*/
if (!ssSetNumOutputPorts(S, 1)) return;
if ( maxNumLimit > 1 ) {
ssSetOutputPortWidth(S, 0, maxNumLimit);
} else {
ssSetOutputPortWidth(S, 0, DYNAMICALLY_SIZED);
}
/*
7-107
7 Implementing Block Features
* inputs
* If the upper or lower limits are not scalar then
* the input is set to the same size. However, the
* ssSetOptions below allows the actual width to
* be reduced to 1 if needed for scalar expansion.
*/
if (!ssSetNumInputPorts(S, 1)) return;
ssSetInputPortDirectFeedThrough(S, 0, 1 );
if ( maxNumLimit > 1 ) {
ssSetInputPortWidth(S, 0, maxNumLimit);
} else {
ssSetInputPortWidth(S, 0, DYNAMICALLY_SIZED);
}
/*
* sample times
*/
ssSetNumSampleTimes(S, 1);
/*
* work
*/
ssSetNumRWork(S, 0);
ssSetNumIWork(S, 0);
ssSetNumPWork(S, 0);
/*
* Modes and zero crossings:
* If we have a variable-step solver and this block has a continuous
* sample time, then
* o One mode element will be needed for each scalar output
* in order to specify which equation is valid (1), (2), or (3).
* o Two ZC elements will be needed for each scalar output
* in order to help the solver find the exact instants
* at which either of the two possible "equation switches"
* One will be for the switch from eq. (1) to (2);
* the other will be for eq. (2) to (3) and vice versa.
7-108
S-Function Examples
* otherwise
* o No modes and nonsampled zero crossings will be used.
*
*/
ssSetNumModes(S, DYNAMICALLY_SIZED);
ssSetNumNonsampledZCs(S, DYNAMICALLY_SIZED);
/*
* options
* o No mexFunctions and no problematic mxFunctions are called
* so the exception free code option safely gives faster simulations.
* o Scalar expansion of the inputs is desired. The option provides
* this without the need to write mdlSetOutputPortWidth and
* mdlSetInputPortWidth functions.
*/
ssSetOptions(S, ( SS_OPTION_EXCEPTION_FREE_CODE |
SS_OPTION_ALLOW_INPUT_SCALAR_EXPANSION));
} /* end mdlInitializeSizes */
The required S-function method mdlInitializeSampleTimes
specifies the S-functions sample rates. The input argument
INHERITED_SAMPLE_TIME passed to ssSetSampleTime specifies that this
S-function inherits its sample time from its driving block. The call to
ssSetModelReferenceSampleTimeDefaultInheritance tells the solver to
use the default rule to determine if submodels containing this S-function can
inherit their sample times from the parent model.
/* Function: mdlInitializeSampleTimes =========================================
* Abstract:
* Specify that the block is continuous.
*/
static void mdlInitializeSampleTimes(SimStruct *S)
{
ssSetSampleTime(S, 0, INHERITED_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0);
ssSetModelReferenceSampleTimeDefaultInheritance(S);
}
7-109
7 Implementing Block Features
The optional method mdlSetWorkWidths initializes the size of the
zero-crossing detection work vectors. Because this method is optional, a
#define statement precedes it. The #if defined statement checks that
the S-function is being compiled as a MEX-file. Zero-crossing detection can
be done only when the S-function is running at a continuous sample rate
using a variable-step solver. The if statement uses ssIsVariableStepSolver,
ssGetSampleTime, and ssGetOffsetTime to determine if this condition is met. If
so, the method sets the number of modes equal to the width of the first output
port and the number of nonsampled zero crossings to twice this amount.
Otherwise, the method sets both values to zero.
#define MDL_SET_WORK_WIDTHS
#if defined(MDL_SET_WORK_WIDTHS) && defined(MATLAB_MEX_FILE)
/* Function: mdlSetWorkWidths ===============================================
* The width of the Modes and the ZCs depends on the width of the output.
* This width is not always known in mdlInitializeSizes so it is handled
* here.
*/
static void mdlSetWorkWidths(SimStruct *S)
{
int nModes;
int nNonsampledZCs;
if (ssIsVariableStepSolver(S) &&
ssGetSampleTime(S,0) == CONTINUOUS_SAMPLE_TIME &&
ssGetOffsetTime(S,0) == 0.0) {
int numOutput = ssGetOutputPortWidth(S, 0);
/*
* modes and zero crossings
* o One mode element will be needed for each scalar output
* in order to specify which equation is valid (1), (2), or (3).
* o Two ZC elements will be needed for each scalar output
* in order to help the solver find the exact instants
* at which either of the two possible "equation switches"
* One will be for the switch from eq. (1) to (2);
* the other will be for eq. (2) to (3) and vice versa.
*/
nModes = numOutput;
7-110
S-Function Examples
nNonsampledZCs = 2 * numOutput;
} else {
nModes = 0;
nNonsampledZCs = 0;
}
ssSetNumModes(S,nModes);
ssSetNumNonsampledZCs(S,nNonsampledZCs);
}
#endif /* MDL_SET_WORK_WIDTHS */
After declaring variables for the input and output signals, the mdlOutputs
functions uses an if-else statement to create blocks of code used to calculate
the output signal based on whether the S-function uses a fixed-step or
variable-step solver. The if statement queries the length of the nonsampled
zero-crossing vector. If the length, set in mdlWorkWidths, is zero, then no
zero-crossing detection is done and the output signals are calculated directly
from the input signals. Otherwise, the function uses the mode work vector
to determine how to calculate the output signal. If the simulation is at a
major time step, i.e., ssIsMajorTimeStep returns true, mdlOutputs determines
which mode the simulation is running in, either saturated at the upper limit,
saturated at the lower limit, or not saturated. Then, for both major and minor
time steps, the function calculates an output based on this mode. If the mode
changed between the previous and current time step, then a zero crossing
occurred. The mdlZeroCrossings function, not mdlOutputs, indicates this
crossing to the solver.
/* Function: mdlOutputs =======================================================
* Abstract:
*
* A saturation is described by three equations
*
* (1) y = UpperLimit
* (2) y = u
* (3) y = LowerLimit
*
* When this block is used with a fixed-step solver or it has a noncontinuous
* sample time, the equations are used as it
*
* Now consider the case of this block being used with a variable-step solver
* and it has a continusous sample time. Solvers work best on smooth problems.
7-111
7 Implementing Block Features
* In order for the solver to work without chattering, limit cycles, or
* similar problems, it is absolutely crucial that the same equation be used
* throughout the duration of a MajorTimeStep. To visualize this, consider
* the case of the Saturation block feeding an Integrator block.
*
* To implement this rule, the mode vector is used to specify the
* valid equation based on the following:
*
* if UpperLimit < u then use (1)
* if LowerLimit <= u <= UpperLimit then use (2)
* if u < LowerLimit then use (3)
*
* The mode vector is changed only at the beginning of a MajorTimeStep.
*
* During a minor time step, the equation specified by the mode vector
* is used without question. Most of the time, the value of u will agree
* with the equation specified by the mode vector. However, sometimes u's
* value will indicate a different equation. Nonetheless, the equation
* specified by the mode vector must be used.
*
* When the mode and u indicate different equations, the corresponding
* calculations are not correct. However, this is not a problem. From
* the ZC function, the solver will know that an equation switch occurred
* in the middle of the last MajorTimeStep. The calculations for that
* time step will be discarded. The ZC function will help the solver
* find the exact instant at which the switch occurred. Using this knowledge,
* the length of the MajorTimeStep will be reduced so that only one equation
* is valid throughout the entire time step.
*/
static void mdlOutputs(SimStruct *S, int_T tid)
{
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
real_T *y = ssGetOutputPortRealSignal(S,0);
int_T numOutput = ssGetOutputPortWidth(S,0);
int_T iOutput;
/*
* Set index and increment for input signal, upper limit, and lower limit
* parameters so that each gives scalar expansion if needed.
*/
7-112
S-Function Examples
int_T uIdx = 0;
int_T uInc = ( ssGetInputPortWidth(S,0) > 1 );
const real_T *upperLimit = mxGetPr( P_PAR_UPPER_LIMIT );
int_T upperLimitInc = ( mxGetNumberOfElements( P_PAR_UPPER_LIMIT ) > 1 );
const real_T *lowerLimit = mxGetPr( P_PAR_LOWER_LIMIT );
int_T lowerLimitInc = ( mxGetNumberOfElements( P_PAR_LOWER_LIMIT ) > 1 );
UNUSED_ARG(tid); /* not used in single tasking mode */
if (ssGetNumNonsampledZCs(S) == 0) {
/*
* This block is being used with a fixed-step solver or it has
* a noncontinuous sample time, so we always saturate.
*/
for (iOutput = 0; iOutput < numOutput; iOutput++) {
if (*uPtrs[uIdx] >= *upperLimit) {
*y++ = *upperLimit;
} else if (*uPtrs[uIdx] > *lowerLimit) {
*y++ = *uPtrs[uIdx];
} else {
*y++ = *lowerLimit;
}
upperLimit += upperLimitInc;
lowerLimit += lowerLimitInc;
uIdx += uInc;
}
} else {
/*
* This block is being used with a variable-step solver.
*/
int_T *mode = ssGetModeVector(S);
/*
* Specify indices for each equation.
*/
enum { UpperLimitEquation, NonLimitEquation, LowerLimitEquation };
/*
7-113
7 Implementing Block Features
* Update the Mode Vector ONLY at the beginning of a MajorTimeStep
*/
if ( ssIsMajorTimeStep(S) ) {
/*
* Specify the mode, ie the valid equation for each output scalar.
*/
for ( iOutput = 0; iOutput < numOutput; iOutput++ ) {
if ( *uPtrs[uIdx] > *upperLimit ) {
/*
* Upper limit eq is valid.
*/
mode[iOutput] = UpperLimitEquation;
} else if ( *uPtrs[uIdx] < *lowerLimit ) {
/*
* Lower limit eq is valid.
*/
mode[iOutput] = LowerLimitEquation;
} else {
/*
* Nonlimit eq is valid.
*/
mode[iOutput] = NonLimitEquation;
}
/*
* Adjust indices to give scalar expansion if needed.
*/
uIdx += uInc;
upperLimit += upperLimitInc;
lowerLimit += lowerLimitInc;
}
/*
* Reset index to input and limits.
*/
uIdx = 0;
upperLimit = mxGetPr( P_PAR_UPPER_LIMIT );
lowerLimit = mxGetPr( P_PAR_LOWER_LIMIT );
} /* end IsMajorTimeStep */
7-114
S-Function Examples
/*
* For both MinorTimeSteps and MajorTimeSteps calculate each scalar
* output using the equation specified by the mode vector.
*/
for ( iOutput = 0; iOutput < numOutput; iOutput++ ) {
if ( mode[iOutput] == UpperLimitEquation ) {
/*
* Upper limit eq.
*/
*y++ = *upperLimit;
} else if ( mode[iOutput] == LowerLimitEquation ) {
/*
* Lower limit eq.
*/
*y++ = *lowerLimit;
} else {
/*
* Nonlimit eq.
*/
*y++ = *uPtrs[uIdx];
}
/*
* Adjust indices to give scalar expansion if needed.
*/
uIdx += uInc;
upperLimit += upperLimitInc;
lowerLimit += lowerLimitInc;
}
}
} /* end mdlOutputs */
The mdlZeroCrossings method determines if a zero crossing occurred
between the previous and current time step. The method obtains a pointer to
the input signal using ssGetInputPortRealSignalPtrs. A comparison of this
signals value to the value of the upper and lower saturation limits determines
values for the elements of the nonsampled zero-crossing vector. If any element
of the nonsampled zero-crossing vector switches from negative to positive, or
positive to negative, a zero crossing occurred. In the event of a zero crossing,
7-115
7 Implementing Block Features
Simulink modifies the step size and recalculates the outputs to try to locate
the exact zero crossing.
#define MDL_ZERO_CROSSINGS
#if defined(MDL_ZERO_CROSSINGS) && (defined(MATLAB_MEX_FILE) || defined(NRT))
/* Function: mdlZeroCrossings =================================================
* Abstract:
* This will only be called if the number of nonsampled zero crossings is
* greater than 0 which means this block has a continuous sample time and the
* model is using a variable-step solver.
*
* Calculate zero crossing (ZC) signals that help the solver find the
* exact instants at which equation switches occur:
*
* if UpperLimit < u then use (1)
* if LowerLimit <= u <= UpperLimit then use (2)
* if u < LowerLimit then use (3)
*
* The key words are help find. There is no choice of a function that will
* direct the solver to the exact instant of the change. The solver will
* track the zero crossing signal and do a bisection style search for the
* exact instant of equation switch.
*
* There is generally one ZC signal for each pair of signals that can
* switch. The three equations above would break into two pairs (1)&(2)
* and (2)&(3). The possibility of a "long jump" from (1) to (3) does
* not need to be handled as a separate case. It is implicitly handled.
*
* When ZCs are calculated, the value is normally used twice. When it is
* first calculated, it is used as the end of the current time step. Later,
* it will be used as the beginning of the following step.
*
* The sign of the ZC signal always indicates an equation from the pair. For
* S-functions, which equation is associated with a positive ZC and which is
* associated with a negative ZC doesn't really matter. If the ZC is positive
* at the beginning and at the end of the time step, this implies that the
* "positive" equation was valid throughout the time step. Likewise, if the
* ZC is negative at the beginning and at the end of the time step, this
* implies that the "negative" equation was valid throughout the time step.
7-116
S-Function Examples
* Like any other nonlinear solver, this is not foolproof, but it is an
* excellent indicator. If the ZC has a different sign at the beginning and
* at the end of the time step, then a equation switch definitely occurred
* during the time step.
*
* Ideally, the ZC signal gives an estimate of when an equation switch
* occurred. For example, if the ZC signal is -2 at the beginning and +6 at
* the end, then this suggests that the switch occurred
* 25% = 100%*(-2)/(-2-(+6)) of the way into the time step. It will almost
* never be true that 25% is perfectly correct. There is no perfect choice
* for a ZC signal, but there are some good rules. First, choose the ZC
* signal to be continuous. Second, choose the ZC signal to give a monotonic
* measure of the "distance" to a signal switch; strictly monotonic is ideal.
*/
static void mdlZeroCrossings(SimStruct *S)
{
int_T iOutput;
int_T numOutput = ssGetOutputPortWidth(S,0);
real_T *zcSignals = ssGetNonsampledZCs(S);
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
/*
* Set index and increment for the input signal, upper limit, and lower
* limit parameters so that each gives scalar expansion if needed.
*/
int_T uIdx = 0;
int_T uInc = ( ssGetInputPortWidth(S,0) > 1 );
real_T *upperLimit = mxGetPr( P_PAR_UPPER_LIMIT );
int_T upperLimitInc = ( mxGetNumberOfElements( P_PAR_UPPER_LIMIT ) > 1 );
real_T *lowerLimit = mxGetPr( P_PAR_LOWER_LIMIT );
int_T lowerLimitInc = ( mxGetNumberOfElements( P_PAR_LOWER_LIMIT ) > 1 );
/*
* For each output scalar, give the solver a measure of "how close things
* are" to an equation switch.
*/
for ( iOutput = 0; iOutput < numOutput; iOutput++ ) {
/* The switch from eq (1) to eq (2)
*
7-117
7 Implementing Block Features
* if UpperLimit < u then use (1)
* if LowerLimit <= u <= UpperLimit then use (2)
*
* is related to how close u is to UpperLimit. A ZC choice
* that is continuous, strictly monotonic, and is
* u - UpperLimit
* or it is negative.
*/
zcSignals[2*iOutput] = *uPtrs[uIdx] - *upperLimit;
/* The switch from eq (2) to eq (3)
*
* if LowerLimit <= u <= UpperLimit then use (2)
* if u < LowerLimit then use (3)
*
* is related to how close u is to LowerLimit. A ZC choice
* that is continuous, strictly monotonic, and is
* u - LowerLimit.
*/
zcSignals[2*iOutput+1] = *uPtrs[uIdx] - *lowerLimit;
/*
* Adjust indices to give scalar expansion if needed.
*/
uIdx += uInc;
upperLimit += upperLimitInc;
lowerLimit += lowerLimitInc;
}
}
#endif /* end mdlZeroCrossings */
The S-function concludes with the required mdlTerminate function. In this
example, the function is empty.
/* Function: mdlTerminate =====================================================
* Abstract:
* No termination needed, but we are required to have this routine.
*/
static void mdlTerminate(SimStruct *S)
7-118
S-Function Examples
{
UNUSED_ARG(S); /* unused input argument */
}
The required S-function trailer includes the files necessary for simulation or
code generation, as follows.
#ifdef MATLAB_MEX_FILE /* Is this file being compiled as a MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration function */
#endif
Note The mdlOutputs and mdlTerminate functions use the
UNUSED_ARG macro to indicate that an input argument the
callback requires is not used. This optional macro is defined in
matlabroot/simulink/include/simstruc_types.h. If used, you must call
this macro once for each input argument that a callback does not use.
Discontinuities in Continuous States
The example S-function matlabroot/simulink/src/stvctf.c demonstrates
a time-varying continuous transfer function. The following Simulink model
uses this S-function.
matlabroot/toolbox/simulink/simdemos/simfeatures/sfcndemo_stvctf.mdl
The S-function demonstrates how to work with the solvers so that the
simulation maintains consistency, which means that the block maintains
smooth and consistent signals for the integrators although the equations that
are being integrated are changing.
matlabroot/simulink/src/stvctf.c
The S-function begins with #define statements for the S-functions name and
level, along with a #include statement for the simstruc.h header. After
these statements, the S-function includes or defines any other necessary
headers, data, etc. This example defines parameters for the transfer functions
numerator and denominator, which are entered into the S-functions dialog.
7-119
7 Implementing Block Features
The comments at the beginning of this S-function provide additional
information on the purpose of the work vectors in this example.
/*
* File : stvctf.c
* Abstract:
* Time Varying Continuous Transfer Function block
*
* This S-function implements a continuous time transfer function
* whose transfer function polynomials are passed in via the input
* vector. This is useful for continuous time adaptive control
* applications.
*
* This S-function is also an example of how to use banks to avoid
* problems with computing derivatives when a continuous output has
* discontinuities. The consistency checker can be used to verify that
* your S-function is correct with respect to always maintaining smooth
* and consistent signals for the integrators. By consistent we mean that
* two mdlOutputs calls at major time t and minor time t are always the
* same. The consistency checker is enabled on the diagnostics page of the
* Configuraion parameters dialog box. The update method of this S-function
* modifies the coefficients of the transfer function, which cause the
* output to "jump." To have the simulation work properly, we need to let
* the solver know of these discontinuities by setting
* ssSetSolverNeedsReset and then we need to use multiple banks of
* coefficients so the coefficients used in the major time step output
* and the minor time step outputs are the same. In the simulation loop
* we have:
* Loop:
* o Output in major time step at time t
* o Update in major time step at time t
* o Integrate (minor time step):
* o Consistency check: recompute outputs at time t and compare
* with current outputs.
* o Derivatives at time t
* o One or more Output,Derivative evaluations at time t+k
* where k <= step_size to be taken.
* o Compute state, x
* o t = t + step_size
* End_Integrate
7-120
S-Function Examples
* End_Loop
* Another purpose of the consistency checker is to verify that when
* the solver needs to try a smaller step_size, the recomputing of
* the output and derivatives at time t doesn't change. Step size
* reduction occurs when tolerances aren't met for the current step size.
* The ideal ordering would be to update after integrate. To achieve
* this we have two banks of coefficients. And the use of the new
* coefficients, which were computed in update, is delayed until after
* the integrate phase is complete.
*
* This block has multiple sample times and will not work correctly
* in a multitasking environment. It is designed to be used in
* a single tasking (or variable step) simulation environment.
* Because this block accesses the input signal in both tasks,
* it cannot specify the sample times of the input and output ports
* (SS_OPTION_PORT_SAMPLE_TIMES_ASSIGNED).
*
* See simulink/src/sfuntmpl_doc.c.
*
* Copyright 1990-7 The MathWorks, Inc.
*/
#define S_FUNCTION_NAME stvctf
#define S_FUNCTION_LEVEL 2
#include "simstruc.h"
/*
* Defines for easy access to the numerator and denominator polynomials
* parameters
*/
#define NUM(S) ssGetSFcnParam(S, 0)
#define DEN(S) ssGetSFcnParam(S, 1)
#define TS(S) ssGetSFcnParam(S, 2)
#define NPARAMS 3
This S-function implements the mdlCheckParameters method to check the
validity of the S-function dialog parameters. Because this method is optional,
a #define statement precedes it. The #if defined statement checks that
this function is compiled as a MEX-file, instead of for use with Real-Time
7-121
7 Implementing Block Features
Workshop. The body of the function performs basic checks to ensure that the
user entered real vectors for the numerator and denominator, and that the
denominator has a higher order than the numerator. If the parameter check
fails, the S-function errors out.
#define MDL_CHECK_PARAMETERS
#if defined(MDL_CHECK_PARAMETERS) && defined(MATLAB_MEX_FILE)
/* Function: mdlCheckParameters =============================================
* Abstract:
* Validate our parameters to verify:
* o The numerator must be of a lower order than the denominator.
* o The sample time must be a real positive nonzero value.
*/
static void mdlCheckParameters(SimStruct *S)
{
int_T i;
for (i = 0; i < NPARAMS; i++) {
real_T *pr;
int_T el;
int_T nEls;
if (mxIsEmpty( ssGetSFcnParam(S,i)) ||
mxIsSparse( ssGetSFcnParam(S,i)) ||
mxIsComplex( ssGetSFcnParam(S,i)) ||
!mxIsNumeric( ssGetSFcnParam(S,i)) ) {
ssSetErrorStatus(S,"Parameters must be real finite vectors");
return;
}
pr = mxGetPr(ssGetSFcnParam(S,i));
nEls = mxGetNumberOfElements(ssGetSFcnParam(S,i));
for (el = 0; el < nEls; el++) {
if (!mxIsFinite(pr[el])) {
ssSetErrorStatus(S,"Parameters must be real finite vectors");
return;
}
}
}
if (mxGetNumberOfElements(NUM(S)) > mxGetNumberOfElements(DEN(S)) &&
mxGetNumberOfElements(DEN(S)) > 0 && *mxGetPr(DEN(S)) != 0.0) {
7-122
S-Function Examples
ssSetErrorStatus(S,"The denominator must be of higher order than "
"the numerator, nonempty and with first "
"element nonzero");
return;
}
/* xxx verify finite */
if (mxGetNumberOfElements(TS(S)) != 1 || mxGetPr(TS(S))[0] <= 0.0) {
ssSetErrorStatus(S,"Invalid sample time specified");
return;
}
}
#endif /* MDL_CHECK_PARAMETERS */
The required S-function method mdlInitializeSizes then sets up the
following S-function characteristics.
ssSetNumSFcnParams sets the number of expected S-function dialog
parameters to three, as defined previously in the variable NPARAMS.
If this method is compiled as a MEX-file, ssGetSFcnParamsCount determines
how many parameters the user entered into the S-function dialog. If the
number of user-specified parameters matches the number returned by
ssGetNumSFcnParams, the method calls mdlCheckParameters to check the
validity of the user-entered data. Otherwise, the S-function errors out.
If the parameter check passes, the S-function specifies the number
of continuous and discrete states using ssSetNumContStates and
ssSetNumDiscStates, respectively. This example has no discrete states and
sets the number of continuous states based on the number of coefficients in
the transfer functions denominator.
Next, ssSetNumInputPorts specifies that the S-function has a single input
port and sets its width to one plus twice the length of the denominator
using ssSetInputPortWidth. The method uses the value provided by the
third S-function dialog parameter as the input ports sample time. This
parameter indicates the rate at which the transfer function is modified
during simulation. The S-function specifies that the input port has direct
feedthrough by passing a value of 1 to ssSetInputPortDirectFeedThrough.
ssSetNumOutputPorts specifies that the S-function has a single output port.
The method uses ssSetOutputPortWidth to set the width of this output port,
7-123
7 Implementing Block Features
ssSetOutputPortSampleTime to specify that the output port has a continuous
sample time, and ssSetOutputPortOffsetTime to set the offset time to zero.
ssSetNumSampleTimes then initializes two sample times, which the
mdlInitializeSampleTimes function configures later.
The method passes a value of four times the number of denominator
coefficients to ssSetNumRWork to set the length of the floating-point work
vector. ssSetNumIWork then sets the length of the integer work vector to two.
The RWork vectors store two banks of transfer function coefficients, while
the IWork vector indicates which bank in the RWork vector is currently
in use. The S-function sets the length of all other work vectors to zero.
These lines could be omitted because zero is the default value for these
macros. However, for clarity, the S-function explicitly sets the number
of work vectors.
Lastly, ssSetOptions sets any applicable options. In this case,
SS_OPTION_EXCEPTION_FREE_CODE stipulates that the code is exception
free.
The mdlInitializeSizes function for this example is shown below.
/* Function: mdlInitializeSizes ===============================================
* Abstract:
* The sizes information is used by Simulink to determine the S-function
* block's characteristics (number of inputs, outputs, states, etc.).
*/
static void mdlInitializeSizes(SimStruct *S)
{
int_T nContStates;
int_T nCoeffs;
/* See sfuntmpl_doc.c for more details on the macros below. */
ssSetNumSFcnParams(S, NPARAMS); /* Number of expected parameters. */
#if defined(MATLAB_MEX_FILE)
if (ssGetNumSFcnParams(S) == ssGetSFcnParamsCount(S)) {
mdlCheckParameters(S);
if (ssGetErrorStatus(S) != NULL) {
return;
}
} else {
7-124
S-Function Examples
return; /* Parameter mismatch will be reported by Simulink. */
}
#endif
/*
* Define the characteristics of the block:
*
* Number of continuous states: length of denominator - 1
* Inputs port width 2 * (NumContStates+1) + 1
* Output port width 1
* DirectFeedThrough: 0 (Although this should be computed.
* We'll assume coefficients entered
* are strictly proper).
* Number of sample times: 2 (continuous and discrete)
* Number of Real work elements: 4*NumCoeffs
* (Two banks for num and den coeff's:
* NumBank0Coeffs
* DenBank0Coeffs
* NumBank1Coeffs
* DenBank1Coeffs)
* Number of Integer work elements: 2 (indicator of active bank 0 or 1
* and flag to indicate when banks
* have been updated).
*
* The number of inputs arises from the following:
* o 1 input (u)
* o the numerator and denominator polynomials each have NumContStates+1
* coefficients
*/
nCoeffs = mxGetNumberOfElements(DEN(S));
nContStates = nCoeffs - 1;
ssSetNumContStates(S, nContStates);
ssSetNumDiscStates(S, 0);
if (!ssSetNumInputPorts(S, 1)) return;
ssSetInputPortWidth(S, 0, 1 + (2*nCoeffs));
ssSetInputPortDirectFeedThrough(S, 0, 0);
ssSetInputPortSampleTime(S, 0, mxGetPr(TS(S))[0]);
7-125
7 Implementing Block Features
ssSetInputPortOffsetTime(S, 0, 0);
if (!ssSetNumOutputPorts(S,1)) return;
ssSetOutputPortWidth(S, 0, 1);
ssSetOutputPortSampleTime(S, 0, CONTINUOUS_SAMPLE_TIME);
ssSetOutputPortOffsetTime(S, 0, 0);
ssSetNumSampleTimes(S, 2);
ssSetNumRWork(S, 4 * nCoeffs);
ssSetNumIWork(S, 2);
ssSetNumPWork(S, 0);
ssSetNumModes(S, 0);
ssSetNumNonsampledZCs(S, 0);
/* Take care when specifying exception free code - see sfuntmpl_doc.c */
ssSetOptions(S, (SS_OPTION_EXCEPTION_FREE_CODE));
} /* end mdlInitializeSizes */
The required S-function method mdlInitializeSampleTimes specifies the
S-functions sample rates. The first call to ssSetSampleTime specifies that the
first sample rate is continuous and the subsequent call to ssSetOffsetTime
sets the offset to zero. The second call to this pair of macros sets the second
sample time to the value of the third S-function parameter with an offset of
zero. The call to ssSetModelReferenceSampleTimeDefaultInheritance tells
the solver to use the default rule to determine if submodels containing this
S-function can inherit their sample times from the parent model.
/* Function: mdlInitializeSampleTimes =========================================
* Abstract:
* This function is used to specify the sample time(s) for the
* S-function. This S-function has two sample times. The
* first, a continous sample time, is used for the input to the
* transfer function, u. The second, a discrete sample time
* provided by the user, defines the rate at which the transfer
* function coefficients are updated.
*/
static void mdlInitializeSampleTimes(SimStruct *S)
7-126
S-Function Examples
{
/*
* the first sample time, continuous
*/
ssSetSampleTime(S, 0, CONTINUOUS_SAMPLE_TIME);
ssSetOffsetTime(S, 0, 0.0);
/*
* the second, discrete sample time, is user provided
*/
ssSetSampleTime(S, 1, mxGetPr(TS(S))[0]);
ssSetOffsetTime(S, 1, 0.0);
ssSetModelReferenceSampleTimeDefaultInheritance(S);
} /* end mdlInitializeSampleTimes */
The optional S-function method mdlInitializeConditions initializes the
continuous state vector and the initial numerator and denominator vectors.
The #define statement before this method is required for Simulink to call
this function. The function initializes the continuous states to zero. The
numerator and denominator coefficients are initialized from the first two
S-function parameters, normalized by the first denominator coefficient. The
function sets the value stored in the IWork vector to zero, to indicate that the
first bank of numerator and denominator coefficients stored in the RWork
vector is currently in use.
#define MDL_INITIALIZE_CONDITIONS
/* Function: mdlInitializeConditions ==========================================
* Abstract:
* Initalize the states, numerator and denominator coefficients.
*/
static void mdlInitializeConditions(SimStruct *S)
{
int_T i;
int_T nContStates = ssGetNumContStates(S);
real_T *x0 = ssGetContStates(S);
int_T nCoeffs = nContStates + 1;
real_T *numBank0 = ssGetRWork(S);
real_T *denBank0 = numBank0 + nCoeffs;
7-127
7 Implementing Block Features
int_T *activeBank = ssGetIWork(S);
/*
* The continuous states are all initialized to zero.
*/
for (i = 0; i < nContStates; i++) {
x0[i] = 0.0;
numBank0[i] = 0.0;
denBank0[i] = 0.0;
}
numBank0[nContStates] = 0.0;
denBank0[nContStates] = 0.0;
/*
* Set up the initial numerator and denominator.
*/
{
const real_T *numParam = mxGetPr(NUM(S));
int numParamLen = mxGetNumberOfElements(NUM(S));
const real_T *denParam = mxGetPr(DEN(S));
int denParamLen = mxGetNumberOfElements(DEN(S));
real_T den0 = denParam[0];
for (i = 0; i < denParamLen; i++) {
denBank0[i] = denParam[i] / den0;
}
for (i = 0; i < numParamLen; i++) {
numBank0[i] = numParam[i] / den0;
}
}
/*
* Normalize if this transfer function has direct feedthrough.
*/
for (i = 1; i < nCoeffs; i++) {
numBank0[i] -= denBank0[i]*numBank0[0];
}
7-128
S-Function Examples
/*
* Indicate bank0 is active (i.e. bank1 is oldest).
*/
*activeBank = 0;
} /* end mdlInitializeConditions */
The mdlOutputs function calculates the S-function output signals when the
S-function is simulating in a continuous task, i.e., ssIsContinuousTask is
true. If the simulation is also at a major time step, mdlOutputs checks if the
numerator and denominator coefficients need to be updated, as indicated by
a switch in the active bank stored in the IWork vector. At both major and
minor time steps, the S-function calculates the output using the numerator
coefficients stored in the active bank.
/* Function: mdlOutputs =======================================================
* Abstract:
* The outputs for this block are computed by using a controllable state-
* space representation of the transfer function.
*/
static void mdlOutputs(SimStruct *S, int_T tid)
{
if (ssIsContinuousTask(S,tid)) {
int i;
real_T *num;
int nContStates = ssGetNumContStates(S);
real_T *x = ssGetContStates(S);
int_T nCoeffs = nContStates + 1;
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
real_T *y = ssGetOutputPortRealSignal(S,0);
int_T *activeBank = ssGetIWork(S);
/*
* Switch banks because we've updated them in mdlUpdate and we're no
* longer in a minor time step.
*/
if (ssIsMajorTimeStep(S)) {
int_T *banksUpdated = ssGetIWork(S) + 1;
if (*banksUpdated) {
*activeBank = !(*activeBank);
7-129
7 Implementing Block Features
*banksUpdated = 0;
/*
* Need to tell the solvers that the derivatives are no
* longer valid.
*/
ssSetSolverNeedsReset(S);
}
}
num = ssGetRWork(S) + (*activeBank) * (2*nCoeffs);
/*
* The continuous system is evaluated using a controllable state space
* representation of the transfer function. This implies that the
* output of the system is equal to:
*
* y(t) = Cx(t) + Du(t)
* = [ b1 b2 ... bn]x(t) + b0u(t)
*
* where b0, b1, b2, ... are the coefficients of the numerator
* polynomial:
*
* B(s) = b0 s^n + b1 s^n-1 + b2 s^n-2 + ... + bn-1 s + bn
*/
*y = *num++ * (*uPtrs[0]);
for (i = 0; i < nContStates; i++) {
*y += *num++ * *x++;
}
}
} /* end mdlOutputs */
Although this example has no discrete states, the method still implements the
mdlUpdate function to update the transfer function coefficients at every major
time step. Because this method is optional, a #define statement precedes it.
The method uses ssGetInputPortRealSignalPtrs to obtain a pointer to the
input signal. The input signals values become the new transfer function
coefficients, which the S-function stores in the bank of the inactive RWork
vector. When the mdlOutputs function is later called at this major time step,
it updates the active bank to be this updated bank of coefficients.
7-130
S-Function Examples
#define MDL_UPDATE
/* Function: mdlUpdate ========================================================
* Abstract:
* Every time through the simulation loop, update the
* transfer function coefficients. Here we update the oldest bank.
*/
static void mdlUpdate(SimStruct *S, int_T tid)
{
if (ssIsSampleHit(S, 1, tid)) {
int_T i;
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
int_T uIdx = 1;/*1st coeff is after signal input*/
int_T nContStates = ssGetNumContStates(S);
int_T nCoeffs = nContStates + 1;
int_T bankToUpdate = !ssGetIWork(S)[0];
real_T *num = ssGetRWork(S)+bankToUpdate*2*nCoeffs;
real_T *den = num + nCoeffs;
real_T den0;
int_T allZero;
/*
* Get the first denominator coefficient. It will be used
* for normalizing the numerator and denominator coefficients.
*
* If all inputs are zero, we probably could have unconnected
* inputs, so use the parameter as the first denominator coefficient.
*/
den0 = *uPtrs[uIdx+nCoeffs];
if (den0 == 0.0) {
den0 = mxGetPr(DEN(S))[0];
}
/*
* Grab the numerator.
*/
allZero = 1;
for (i = 0; (i < nCoeffs) && allZero; i++) {
allZero &= *uPtrs[uIdx+i] == 0.0;
7-131
7 Implementing Block Features
}
if (allZero) { /* if numerator is all zero */
const real_T *numParam = mxGetPr(NUM(S));
int_T numParamLen = mxGetNumberOfElements(NUM(S));
/*
* Move the input to the denominator input and
* get the denominator from the input parameter.
*/
uIdx += nCoeffs;
num += nCoeffs - numParamLen;
for (i = 0; i < numParamLen; i++) {
*num++ = *numParam++ / den0;
}
} else {
for (i = 0; i < nCoeffs; i++) {
*num++ = *uPtrs[uIdx++] / den0;
}
}
/*
* Grab the denominator.
*/
allZero = 1;
for (i = 0; (i < nCoeffs) && allZero; i++) {
allZero &= *uPtrs[uIdx+i] == 0.0;
}
if (allZero) { /* If denominator is all zero. */
const real_T *denParam = mxGetPr(DEN(S));
int_T denParamLen = mxGetNumberOfElements(DEN(S));
den0 = denParam[0];
for (i = 0; i < denParamLen; i++) {
*den++ = *denParam++ / den0;
}
} else {
for (i = 0; i < nCoeffs; i++) {
*den++ = *uPtrs[uIdx++] / den0;
}
7-132
S-Function Examples
}
/*
* Normalize if this transfer function has direct feedthrough.
*/
num = ssGetRWork(S) + bankToUpdate*2*nCoeffs;
den = num + nCoeffs;
for (i = 1; i < nCoeffs; i++) {
num[i] -= den[i]*num[0];
}
/*
* Indicate oldest bank has been updated.
*/
ssGetIWork(S)[1] = 1;
}
} /* end mdlUpdate */
The mdlDerivatives function calculates the continuous state derivatives.
The function uses the coefficients from the active bank to solve a controllable
state-space representation of the transfer function.
#define MDL_DERIVATIVES
/* Function: mdlDerivatives ===================================================
* Abstract:
* The derivatives for this block are computed by using a controllable
* state-space representation of the transfer function.
*/
static void mdlDerivatives(SimStruct *S)
{
int_T i;
int_T nContStates = ssGetNumContStates(S);
real_T *x = ssGetContStates(S);
real_T *dx = ssGetdX(S);
int_T nCoeffs = nContStates + 1;
int_T activeBank = ssGetIWork(S)[0];
const real_T *num = ssGetRWork(S) + activeBank*(2*nCoeffs);
const real_T *den = num + nCoeffs;
InputRealPtrsType uPtrs = ssGetInputPortRealSignalPtrs(S,0);
7-133
7 Implementing Block Features
/*
* The continuous system is evaluated using a controllable state-space
* representation of the transfer function. This implies that the
* next continuous states are computed using:
*
* dx = Ax(t) + Bu(t)
* = [-a1 -a2 ... -an] [x1(t)] + [u(t)]
* [ 1 0 ... 0] [x2(t)] + [0]
* [ 0 1 ... 0] [x3(t)] + [0]
* [ . . ... .] . + .
* [ . . ... .] . + .
* [ . . ... .] . + .
* [ 0 0 ... 1 0] [xn(t)] + [0]
*
* where a1, a2, ... are the coefficients of the numerator polynomial:
*
* A(s) = s^n + a1 s^n-1 + a2 s^n-2 + ... + an-1 s + an
*/
dx[0] = -den[1] * x[0] + *uPtrs[0];
for (i = 1; i < nContStates; i++) {
dx[i] = x[i-1];
dx[0] -= den[i+1] * x[i];
}
} /* end mdlDerivatives */
Simulink requires the S-function to contain an mdlTerminate function. In
this example, the function is empty.
/* Function: mdlTerminate =====================================================
* Abstract:
* Called when the simulation is terminated.
* For this block, there are no end of simulation tasks.
*/
static void mdlTerminate(SimStruct *S)
{
UNUSED_ARG(S); /* unused input argument */
} /* end mdlTerminate */
7-134
S-Function Examples
The required S-function trailer includes the files necessary for simulation or
code generation, as follows.
#ifdef MATLAB_MEX_FILE /* Is this file being compiled as a MEX-file? */
#include "simulink.c" /* MEX-file interface mechanism */
#else
#include "cg_sfun.h" /* Code generation registration function */
#endif
Note The mdlTerminate function uses the UNUSED_ARG macro to indicate that
an input argument the callback requires is not used. This optional macro is
defined in matlabroot/simulink/include/simstruc_types.h. If used, you
must call this macro once for each input argument that a callback does not use.
7-135
7 Implementing Block Features
7-136
8
S-Function Callback
Methods Alphabetical
List
Every user-written S-function must implement a set of methods, called
callback methods or simply callbacks, that Simulink invokes when simulating
a model that contains the S-function. Some callback methods are optional.
Simulink invokes an optional callback only if the S-function defines the
callback. This section describes the purpose and syntax of all callback
methods that an S-function can implement. In each case, the documentation
for a callback method indicates whether it is required or optional. For a list
of required callback methods, see Callback Methods That an S-Function
Must Implement on page 3-50.
mdlCheckParameters
Purpose Check the validity of an S-functions parameters
Required No
C Syntax void mdlCheckParameters(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax CheckParameters(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing an
S-Function block.
Description Verifies new parameter settings whenever parameters change or
are reevaluated during a simulation. This function is only valid for
simulation, and must be enclosed in a #if defined(MATLAB_MEX_FILE)
statement to be compatible with Real-Time Workshop targets that
support non-inlined S-functions.
When a simulation is running, changes to S-function parameters can
occur at any time during the simulation loop, that is, either at the start
of a simulation step or during a simulation step. When the change
occurs during a simulation step, Simulink calls this routine twice to
handle the parameter change. The first call during the simulation step
is used to verify that the parameters are correct. After verifying the
new parameters, the simulation continues using the original parameter
values until the next simulation step, at which time the new parameter
values are used. Redundant calls are needed to maintain simulation
consistency.
8-2
mdlCheckParameters
Note You cannot access the work, state, input, output, and other
vectors in this routine. Use this routine only to validate the
parameters. Additional processing of the parameters should be done in
mdlProcessParameters.
Example This example checks the first S-function parameter to verify that it is
a real nonnegative scalar.
Note Since mdlCheckParameters is an optional method, a #define
MDL_CHECK_PARAMETERS statement precedes the function. Also,
since Real-Time Workshop does not support code generation
for mdlCheckParameters, the function is wrapped in a #if
defined(MATLAB_MEX_FILE) statement.
#define PARAM1(S) ssGetSFcnParam(S,0)
#define MDL_CHECK_PARAMETERS /* Change to #undef to remove function */
#if defined(MDL_CHECK_PARAMETERS) && defined(MATLAB_MEX_FILE)
static void mdlCheckParameters(SimStruct *S)
{
if (mxGetNumberOfElements(PARAM1(S)) != 1) {
ssSetErrorStatus(S,"Parameter to S-function must be a scalar");
return;
} else if (mxGetPr(PARAM1(S))[0] < 0) {
ssSetErrorStatus(S, "Parameter to S-function must be nonnegative");
return;
}
}
#endif /* MDL_CHECK_PARAMETERS */
In addition to the preceding routine, you must add a call to this method
from mdlInitializeSizes to check parameters during initialization,
because mdlCheckParameters is only called while the simulation is
running. To do this, after setting the number of parameters you expect
8-3
mdlCheckParameters
in your S-function by using ssSetNumSFcnParams, use this code in
mdlInitializeSizes:
static void mdlInitializeSizes(SimStruct *S)
{
ssSetNumSFcnParams(S, 1); /* Number of expected parameters */
#if defined(MATLAB_MEX_FILE)
if(ssGetNumSFcnParams(S) == ssGetSFcnParamsCount(S) {
mdlCheckParameters(S);
if(ssGetErrorStates(S) != NULL) return;
} else {
return; /* Simulink will report a mismatch error. */
}
#endif
...
}
Note The macro ssGetSFcnParamsCount returns the actual number of
parameters entered in the dialog box.
See matlabroot/simulink/src/sfun_errhdl.c for an example.
Languages Ada, C, M
See Also mdlProcessParameters, ssGetSFcnParamsCount
8-4
mdlDerivatives
Purpose Compute the S-functions derivatives
Required No
C Syntax void mdlDerivatives(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax Derivatives(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block
Description Simulink invokes this optional method at each time step to compute the
derivatives of the S-functions continuous states. This method should
store the derivatives in the S-functions state derivatives vector. This
method can use ssGetdX to get a pointer to the derivatives vector.
Each time the mdlDerivatives routine is called, it must explicitly set
the values of all derivatives. The derivative vector does not maintain
the values from the last call to this routine. The memory allocated to
the derivative vector changes during execution.
8-5
mdlDerivatives
Note When generating code for a noninlined S-function that
contains this method, make sure the method is not wrapped in a #if
defined(MATLAB_MEX_FILE) statement. For example:
#define MDL_DERIVATIVES
#if defined(MDL_DERIVATIVES) && defined(MATLAB_MEX_FILE)
static void mdlDerivatives(SimStruct *S)
{
/* Add mdlDerivatives code here *
}
#endif
The define statement makes the mdlDerivatives method available
only to a MATLAB MEX-file. If the S-function is not inlined, Real-Time
Workshop cannot use this method, resulting in link or run-time errors.
Example For an example, see matlabroot/simulink/src/csfunc.c.
A Level-2 M-file example can be found in
matlabroot/toolbox/simulink/blocks/msfcn_limintm.m.
Languages Ada, C, M
See Also ssGetdx
8-6
mdlDisable
Purpose Respond to disabling of an enabled system containing this block
Required No
C Syntax void mdlDisable(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax Disable(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description Simulink invokes this optional method if this block resides in an
enabled subsystem and the enabled subsystem changes from an enabled
to a disabled state at the current time step. Your S-function can use
this method to perform any actions required by the disabling of the
containing subsystem.
Languages Ada, C, M
See Also mdlEnable
8-7
mdlEnable
Purpose Respond to enabling of an enabled system containing this block
Required No
C Syntax void mdlEnable(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax Enable(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description Simulink invokes this optional method if this block resides in an
enabled subsystem and the enabled subsystem changes from a disabled
to an enabled state at the current time step. Your S-function can use
this method to perform any actions required by the enabling of the
containing subsystem.
Languages Ada, C, M
See Also mdlDisable
8-8
mdlGetTimeOfNextVarHit
Purpose Specify time of the next sample time hit
Required No
C Syntax void mdlGetTimeOfNextVarHit(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
Description Simulink invokes this optional method at every major integration step
to get the time of the next sample time hit. This method should set the
time of next hit, using ssSetTNext. The time of the next hit must be
greater than the current simulation time as returned by ssGetT. The
S-function must implement this method if it operates at a discrete,
variable-step sample time.
For Level-2 M-file S-functions, use a sample time of -2 to
specify a variable sample time. The S-functions output method
should then update the NextTimeHit property of the instance
of the Simulink.MSFcnRunTimeBlock class representing the
S-Function block to set the time of the next sample time hit. See
matlabroot/toolbox/simulink/blocks/msfcn_vs.m for an example.
For Level-1 M-file S-functions, a flag of 4 is passed to the S-function
when the next sample time hit needs to be calculated.
Note The time of the next hit can be a function of the input signals.
Example static void mdlGetTimeOfNextVarHit(SimStruct *S)
{
time_T offset = getOffset();
time_T timeOfNextHit = ssGetT(S) + offset;
ssSetTNext(S, timeOfNextHit);
}
8-9
mdlGetTimeOfNextVarHit
Languages C, M
See Also mdlInitializeSampleTimes, ssGetT, ssSetTNext
8-10
mdlInitializeConditions
Purpose Initialize the state vectors of this S-function
Required No
C Syntax void mdlInitializeConditions(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax InitializeConditions(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description Simulink invokes this optional method at the beginning of a simulation.
It should initialize the continuous and discrete states, if any, of this
S-Function block. Use ssGetContStates and/or ssGetDiscStates to
get the states. This method can also perform any other initialization
activities that this S-function requires.
If this S-function resides in an enabled subsystem configured to reset
states, Simulink also calls this method when the enabled subsystem
restarts execution. This method can use the ssIsFirstInitCond macro
to determine whether it is being called for the first time.
8-11
mdlInitializeConditions
Note When generating code for a noninlined S-function that
contains this method, make sure the method is not wrapped in a #if
defined(MATLAB_MEX_FILE) statement. For example:
#define MDL_INITIALIZE_CONDITIONS
#if defined(MDL_INITIALIZE_CONDITIONS) && defined(MATLAB_MEX_FILE)
static void mdlInitializeConditions(SimStruct *S)
{
/* Add mdlInitializeConditions code here *
}
#endif
The define statement makes the mdlInitializeConditions method
available only to a MATLAB MEX-file. If the S-function is not inlined,
Real-Time Workshop cannot use this method, resulting in link or
run-time errors.
Example This example is an S-function with both continuous and discrete states.
It initializes both sets of states to 1.0.
#define MDL_INITIALIZE_CONDITIONS /*Change to #undef to remove */
/*function*/
#if defined(MDL_INITIALIZE_CONDITIONS)
static void mdlInitializeConditions(SimStruct *S)
{
int i;
real_T *xcont = ssGetContStates(S);
int_T nCStates = ssGetNumContStates(S);
real_T *xdisc = ssGetRealDiscStates(S);
int_T nDStates = ssGetNumDiscStates(S);
for (i = 0; i < nCStates; i++) {
*xcont++ = 1.0;
}
8-12
mdlInitializeConditions
for (i = 0; i < nDStates; i++) {
*xdisc++ = 1.0;
}
}
#endif /* MDL_INITIALIZE_CONDITIONS */
For another example that initializes only the continuous states, see
matlabroot/simulink/src/resetint.c.
Languages C, C++, M
See Also mdlStart, ssIsFirstInitCond, ssGetContStates, ssGetDiscStates
8-13
mdlInitializeSampleTimes
Purpose Specify the sample rates at which this S-function operates
Required Yes
C Syntax void mdlInitializeSampleTimes(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
Description This method should specify the sample time and offset time for each
sample rate at which this S-function operates via the following paired
macros
ssSetSampleTime(S, sampleTimeIndex, sample_time)
ssSetOffsetTime(S, offsetTimeIndex, offset_time)
where sampleTimeIndex runs from 0 to one less than the
number of sample times specified in mdlInitializeSizes via
ssSetNumSampleTimes.
If the S-function operates at one or more sample rates, this method
can specify any of the following sample time and offset values for a
given sample time:
[CONTINUOUS_SAMPLE_TIME, 0.0]
[CONTINUOUS_SAMPLE_TIME, FIXED_IN_MINOR_STEP_OFFSET]
[discrete_sample_period, offset]
[VARIABLE_SAMPLE_TIME, 0.0]
The uppercase values are macros defined in simstruc_types.h.
If the S-function operates at one rate, this method can alternatively set
the sample time to one of the following sample/offset time pairs.
[INHERITED_SAMPLE_TIME, 0.0]
8-14
mdlInitializeSampleTimes
[INHERITED_SAMPLE_TIME, FIXED_IN_MINOR_STEP_OFFSET]
If the number of sample times is 0, Simulink assumes that the
S-function inherits its sample time from the block to which it is
connected, i.e., that the sample time is
[INHERITED_SAMPLE_TIME, 0.0]
This method can therefore return without doing anything.
Use the following guidelines when specifying sample times.
A continuous function that changes during minor integration steps
should set the sample time to
[CONTINUOUS_SAMPLE_TIME, 0.0]
A continuous function that does not change during minor integration
steps should set the sample time to
[CONTINUOUS_SAMPLE_TIME, FIXED_IN_MINOR_STEP_OFFSET]
A discrete function that changes at a specified rate should set the
sample time to
[discrete_sample_period, offset]
where
discrete_sample_period > 0.0
and
0.0 <= offset < discrete_sample_period
A discrete function that changes at a variable rate should set the
sample time to
[VARIABLE_SAMPLE_TIME, 0.0]
8-15
mdlInitializeSampleTimes
Simulink invokes the mdlGetTimeOfNextVarHit function to get the
time of the next sample hit for the variable-step discrete task.
Note that VARIABLE_SAMPLE_TIME requires a variable-step solver.
To operate correctly in a triggered subsystem or a periodic system, a
discrete S-function should
- Specify a single sample time set to
[INHERITED_SAMPLE_TIME, 0.0]
- Use ssSetOptions to set the
SS_OPTION_DISALLOW_CONSTANT_SAMPLE_TIME
simulation option in mdlInitializeSizes
- Verify that it was assigned a discrete or triggered sample time in
mdlSetWorkWidths:
if (ssGetSampleTime(S, 0) == CONTINUOUS_SAMPLE_TIME) {
ssSetErrorStatus(S,
"This block cannot be assigned a continuous sample
time");
}
After propagating sample times throughout the block diagram,
Simulink assigns the sample time
[INHERITED_SAMPLE_TIME, INHERITED_SAMPLE_TIME]
to discrete blocks residing in triggered subsystems.
If this function has no intrinsic sample time, it should set its sample
time to inherited according to the following guidelines:
A function that changes as its input changes, even during minor
integration steps, should set its sample time to
[INHERITED_SAMPLE_TIME, 0.0]
8-16
mdlInitializeSampleTimes
A function that changes as its input changes, but doesnt change
during minor integration steps (i.e., is held during minor steps)
should set its sample time to
[INHERITED_SAMPLE_TIME, FIXED_IN_MINOR_STEP_OFFSET]
The S-function should use the ssIsSampleHit or ssIsContinuousTask
macros to check for a sample hit during execution (in mdlOutputs or
mdlUpdate). For example, if the blocks first sample time is continuous,
the function can use the following code fragment to check for a sample
hit.
if (ssIsContinuousTask(S,tid)) {
}
Note The function receives incorrect results if it uses
ssIsSampleHit(S,0,tid).
If the function wants to determine whether the third (discrete) task has
a hit, it can use the following code fragment.
if (ssIsSampleHit(S,2,tid) {
}
8-17
mdlInitializeSampleTimes
Note When generating code for a noninlined S-function that
contains this method, make sure the method is not wrapped in a #if
defined(MATLAB_MEX_FILE) statement. For example:
#if defined(MATLAB_MEX_FILE)
static void mdlInitializeSampleTimes(SimStruct *S)
{
/* Add mdlInitializeSampleTimes code here *
}
#endif
The define statement makes the mdlInitializeSampleTimes method
available only to a MATLAB MEX-file. If the S-function is not inlined,
Real-Time Workshop cannot use this method, resulting in link or
run-time errors.
Languages C
See Also mdlSetInputPortSampleTime, mdlSetOutputPortSampleTime
8-18
mdlInitializeSizes
Purpose Specify the number of inputs, outputs, states, parameters, and other
characteristics of the S-function
Required Yes
C Syntax void mdlInitializeSizes(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax setup(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description This is the first of the S-functions callback methods that Simulink calls.
This method should perform the following tasks:
Specify the number of parameters that this S-function supports,
using ssSetNumSFcnParams.
Use ssSetSFcnParamTunable(S,paramIdx, 0) when a parameter
cannot change during simulation, where paramIdx starts at 0. When
a parameter has been specified as not tunable, Simulink issues an
error during simulation (or the Real-Time Workshop external mode)
if an attempt is made to change the parameter.
Specify the number of states that this function has, using
ssSetNumContStates and ssSetNumDiscStates.
Configure the blocks input ports.
This entails the following tasks:
8-19
mdlInitializeSizes
- Specify the number of input ports that this S-function has, using
ssSetNumInputPorts.
- Specify the dimensions of the input ports.
See ssSetInputPortDimensionInfo for more information.
- For each input port, specify whether it has direct feedthrough,
using ssSetInputPortDirectFeedThrough.
A port has direct feedthrough if the input is used in either the
mdlOutputs or mdlGetTimeOfNextVarHit function. The direct
feedthrough flag for each input port can be set to either 1=yes
or 0=no. It should be set to 1 if the input, u, is used in the
mdlOutputs or mdlGetTimeOfNextVarHit routine. Setting the
direct feedthrough flag to 0 tells Simulink that u is not used
in either of these S-function routines. Violating this leads to
unpredictable results.
Configure the blocks output ports.
This entails the following tasks:
- Specify the number of output ports that the block has, using
ssSetNumOutputPorts.
- Specify the dimensions of the output ports.
See mdlSetOutputPortDimensionInfo for more information.
If your S-function outputs are discrete (for example, the
outputs only take specific values such as 0, 1, and 2), specify
SS_OPTION_DISCRETE_VALUED_OUTPUT.
Set the number of sample times (i.e., sample rates) at which the
block operates.
There are two ways of specifying sample times:
- Port-based sample times
- Block-based sample times
8-20
mdlInitializeSizes
See Sample Times on page 7-26 for a complete discussion of sample
time issues.
For multirate S-functions, the suggested approach to setting sample
times is via the port-based sample times method. When you create a
multirate S-function, you must take care to verify that, when slower
tasks are preempted, your S-function correctly manages data so as to
avoid race conditions. When port-based sample times are specified,
the block cannot inherit a constant sample time at any port.
Set the size of the blocks work vectors, using ssSetNumRWork,
ssSetNumIWork, ssSetNumPWork, ssSetNumModes,
ssSetNumNonsampledZCs.
Set the simulation options that this block implements, using
ssSetOptions.
All options have the form SS_OPTION_<name>. See ssSetOptions
for information on each option. The options should be bitwise ORd
together, as in
ssSetOptions(S, (SS_OPTION_name1 | SS_OPTION_name2))
8-21
mdlInitializeSizes
Note When generating code for a noninlined S-function that
contains this method, make sure the method is not wrapped in a #if
defined(MATLAB_MEX_FILE) statement. For example:
#if defined(MATLAB_MEX_FILE)
static void mdlInitializeSizes(SimStruct *S)
{
/* Add mdlInitializeSizes code here *
}
#endif
The define statement makes the mdlInitializeSizes method
available only to a MATLAB MEX-file. If the S-function is not inlined,
Real-Time Workshop cannot use this method, resulting in link or
run-time errors.
Dynamically Sized Block Features
You can set the parameters NumContStates, NumDiscStates,
NumInputs, NumOutputs, NumRWork, NumIWork, NumPWork, NumModes,
and NumNonsampledZCs to a fixed nonnegative integer or tell Simulink
to size them dynamically:
DYNAMICALLY_SIZED -- Sets lengths of states, work vectors, and so
on to values inherited from the driving block. It sets widths to the
actual input widths, according to the scalar expansion rules unless
you use mdlSetWorkWidths to set the widths.
0 or positive number -- Sets lengths (or widths) to the specified
values. The default is 0.
Example static void mdlInitializeSizes(SimStruct *S)
{
int_T nInputPorts = 1; /* number of input ports */
int_T nOutputPorts = 1; /* number of output ports */
int_T needsInput = 1; /* direct feed through */
8-22
mdlInitializeSizes
int_T inputPortIdx = 0;
int_T outputPortIdx = 0;
ssSetNumSFcnParams(S, 0); /* Number of expected parameters */
if (ssGetNumSFcnParams(S) != ssGetSFcnParamsCount(S)) {
/*
* If the number of expected input parameters is not
* equal to the number of parameters entered in the
* dialog box, return. Simulink will generate an error
* indicating that there is aparameter mismatch.
*/
return;
}else {
mdlCheckParameters(S);
if (ssGetErrorStatus(s) != NULL)
return;
}
ssSetNumContStates( S, 0);
ssSetNumDiscStates( S, 0);
/*
* Configure the input ports. First set the number of input
* ports.
*/
if (!ssSetNumInputPorts(S, nInputPorts)) return;
/*
* Set input port dimensions for each input port index
* starting at 0.
*/
if(!ssSetInputPortDimensionInfo(S, inputPortIdx,
DYNAMIC_DIMENSION)) return;
/*
8-23
mdlInitializeSizes
* Set direct feedthrough flag (1=yes, 0=no).
*/
ssSetInputPortDirectFeedThrough(S, inputPortIdx, needsInput);
/*
* Configure the output ports. First set the number of
* output ports.
*/
if (!ssSetNumOutputPorts(S, nOutputPorts)) return;
/*
* Set output port dimensions for each output port index
* starting at 0.
*/
if(!ssSetOutputPortDimensionInfo(S,outputPortIdx,
DYNAMIC_DIMENSION)) return;
/*
* Set the number of sample times. */
ssSetNumSampleTimes(S, 1);
/*
* Set size of the work vectors.
*/
ssSetNumRWork(S, 0); /* real vector */
ssSetNumIWork(S, 0); /* integer vector */
ssSetNumPWork(S, 0); /* pointer vector */
ssSetNumModes(S, 0); /* mode vector */
ssSetNumNonsampledZCs(S, 0); /* zero crossings */
ssSetOptions(S, 0);
} /* end mdlInitializeSizes */
Languages Ada, C, M
8-24
mdlOutputs
Purpose Compute the signals that this block emits
Required Yes
C Syntax void mdlOutputs(SimStruct *S, int_T tid)
C
Arguments
S
SimStruct representing an S-Function block.
tid
Task ID.
M Syntax Outputs(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description Simulink invokes this required method at each simulation time step.
The method should compute the S-functions outputs at the current
time step and store the results in the S-functions output signal arrays.
The tid (task ID) argument specifies the task running when the
mdlOutputs routine is invoked. You can use this argument in the
mdlOutports routine of a multirate S-Function block to encapsulate
task-specific blocks of code (see Multirate S-Function Blocks on page
7-37).
Use the UNUSED_ARG macro if the S-function does not contain
task-specific blocks of code to indicate that the tid input argument is
required but not used in the body of the callback. To do this, insert
the line
UNUSED_ARG(tid)
after the declarations in mdlOutputs.
8-25
mdlOutputs
For an example of an mdlOutputs routine that works with multiple input
and output ports, see matlabroot/simulink/src/sfun_multiport.c.
Note When generating code for a noninlined S-function that
contains this method, make sure the method is not wrapped in a #if
defined(MATLAB_MEX_FILE) statement. For example:
#if defined(MATLAB_MEX_FILE)
static void mdlOutputs(SimStruct *S)
{
/* Add mdlOutputs code here *
}
#endif
The define statement makes the mdlOutputs method available only
to a MATLAB MEX-file. If the S-function is not inlined, Real-Time
Workshop cannot use this method, resulting in link or run-time errors.
Languages Ada, C, C++, M
See Also ssGetOutputPortComplexSignal, ssGetOutputPortRealSignal,
ssGetOutputPortSignal
8-26
mdlProcessParameters
Purpose Process the S-functions parameters
Required No
C Syntax void mdlProcessParameters(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax ProcessParameters(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description This is an optional routine that Simulink calls after
mdlCheckParameters changes and verifies parameters. The processing
is done at the top of the simulation loop when it is safe to process the
changed parameters. This function is only valid for simulation, and
must be enclosed in a #if defined(MATLAB_MEX_FILE) statement.
The purpose of this routine is to process newly changed parameters.
An example is to cache parameter changes in work vectors. Simulink
does not call this routine when it is used with Real-Time Workshop.
Therefore, if you use this routine in an S-function designed for use with
Real-Time Workshop, you must write your S-function so that it doesnt
rely on this routine. To do this, you must inline your S-function by
using the Target Language Compiler. See Real-Time Workshop Target
Language Compiler for information on inlining S-functions.
The synopsis is
#define MDL_PROCESS_PARAMETERS /* Change to #undef to remove function */
#if defined(MDL_PROCESS_PARAMETERS) && defined(MATLAB_MEX_FILE)
static void mdlProcessParameters(SimStruct *S)
8-27
mdlProcessParameters
{
}
#endif /* MDL_PROCESS_PARAMETERS */
Example This example processes a string parameter that mdlCheckParameters
has verified to be of the form '+++' (where there could be any number
of '+' or '-' characters).
#define MDL_PROCESS_PARAMETERS /* Change to #undef to remove function */
#if defined(MDL_PROCESS_PARAMETERS) && defined(MATLAB_MEX_FILE)
static void mdlProcessParameters(SimStruct *S)
{
int_T i;
char_T *plusMinusStr;
int_T nInputPorts = ssGetNumInputPorts(S);
int_T *iwork = ssGetIWork(S);
if ((plusMinusStr=(char_T*)malloc(nInputPorts+1)) == NULL) {
ssSetErrorStatus(S,"Memory allocation error in mdlStart");
return;
}
if (mxGetString(SIGNS_PARAM(S),plusMinusStr,nInputPorts+1) != 0) {
free(plusMinusStr);
ssSetErrorStatus(S,"mxGetString error in mdlStart");
return;
}
for (i = 0; i < nInputPorts; i++) {
iwork[i] = plusMinusStr[i] == '+'? 1: -1;
}
free(plusMinusStr);
}
#endif /* MDL_PROCESS_PARAMETERS */
mdlProcessParameters is called from mdlStart to load the signs string
prior to the start of the simulation loop.
#define MDL_START
8-28
mdlProcessParameters
#if defined(MDL_START)
static void mdlStart(SimStruct *S)
{
mdlProcessParameters(S);
}
#endif /* MDL_START */
Languages Ada, C, M
See Also mdlCheckParameters
8-29
mdlProjection
Purpose Perturb the solvers solution of a systems states to better satisfy
time-invariant solution relationships
Required No
C Syntax void mdlProjection(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax Projection(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description This method is intended for use with S-functions that model dynamic
systems whose states satisfy time-invariant relationships, such as those
resulting from mass or energy conservation or other physical laws.
Simulink invokes this method at each time step after the models solver
has computed the S-functions states for that time step. Typically, slight
errors in the numerical solution of the states cause the solutions to
fail to satisfy solution invariants exactly. Your mdlProjection method
can compensate for the errors by perturbing the states so that they
more closely approximate solution invariants at the current time step.
As a result, the numerical solution adheres more closely to the ideal
solution as the simulation progresses, producing a more accurate overall
simulation of the system modeled by your S-function.
Your mdlProjection methods perturbations of system states must fall
within the solution error tolerances specified by the model in which the
S-function is embedded. Otherwise, the perturbations may invalidate
the solvers solution. It is up to your mdlProjection method to ensure
that the perturbations meet the error tolerances specified by the model.
See Perturbing a Systems States Using a Solution Invariant on page
8-30
mdlProjection
8-31 for a simple method for perturbing a systems states. The following
articles describe more sophisticated perturbation methods that your
mdlProjection method can use.
C.W. Gear, Maintaining Solution Invariants in the Numerical
Solution of ODEs, Journal on Scientific and Statistical Computing,
Vol. 7, No. 3, July 1986.
L.F. Shampine, Conservation Laws and the Numerical Solution of
ODEs I, Computers and Mathematics with Applications, Vol. 12B,
pp. 12871296, 1986.
L.F. Shampine, Conservation Laws and the Numerical Solution of
ODEs II, Computers and Mathematics with Applications, Vol. 38,
pp. 6172, 1999.
Perturbing a Systems States Using a Solution Invariant
Here is a simple, Taylor-series-based approach to perturbing a systems
states. Suppose your S-function models a dynamic system having
a solution invariant, g X t ( , ) , i.e., g is a continuous, differentiable
function of the system states, X , and time,
t
, whose value is constant
with time. Then
X X J J J R
n n n
T
n n
T
n
+
*
( )
1
where
X
n
is the systems ideal state vector at the solvers current time step
X
n
*
is the approximate state vector computed by the solver at the
current time step
J
n
is the Jacobian of the invariant function evaluated at the point in
state space specified by the approximate state vector at the current
time step:
8-31
mdlProjection
J
g
X
X t
n n n
=
( , )
*
t
n
is the time at the current time step
R
n
is the residual (difference) between the invariant function
evaluated at X
n
and X
n
*
at the current time step:
R g X t g X t
n n n n n
= ( , ) ( , )
*
Note The value of g X t
n n
( , ) is the same at each time step and is
known by definition.
Given a continuous, differentiable invariant function for the system
that your S-function models, this formula allows your S-functions
mdlProjection method to compute a perturbation
J J J R
n
T
n n
T
n
( )
1
of the solvers numerical solution, X
n
*
, that more closely matches the
ideal solution, X
n
, keeping the S-functions solution from drifting from
the ideal solution as the simulation progresses.
Example
This example illustrates how the perturbation method outlined in the
previous section can keep a models numerical solution from drifting
from the ideal solution as a simulation progresses. Consider the
following model (open):
8-32
mdlProjection
The PredPrey block references an S-function, predprey_noproj.m, that
uses the Lotka-Volterra equations
x ax y
y cy x
=
=
( )
( )
1
1
to model predator-prey population dynamics, where x t ( ) is the
population density of the predators and y t ( ) is the population density
of prey. The ideal solution to the predator-prey ODEs satisfies the
time-invariant function
x e y e d
c cx a ay
=
where a , c , and d are constants. The S-function assumes a = 1, c =
2, and d = 121.85.
The Invariant Residual block in this model computes the residual
between the invariant function evaluated along the systems ideal
trajectory through state space and its simulated trajectory:
R d x e y e
n n
c cx
n
a ay
n n
=
where x
n
and y
n
are the values computed by the models solver for the
predator and prey population densities, respectively, at the current
time step. Ideally, the residual should be zero throughout simulation of
the model, but simulating the model reveals that the residual actually
strays considerably from zero:
8-33
mdlProjection
Now consider the following model (open):
This model is the same as the previous model, except that its
S-function, predprey.m, includes a mdlProjection method that uses
8-34
mdlProjection
the perturbation approach outlined in Perturbing a Systems States
Using a Solution Invariant on page 8-31 to compensate for numerical
drift. As a result, the numerical solution more closely tracks the ideal
solution as the simulation progresses as demonstrated by the residual
signal, which remains near or at zero throughout the simulation:
Languages C, M
8-35
mdlRTW
Purpose Generate code generation data
Required No
C Syntax void mdlRTW(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax WriteRTW(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description This function is called when Real-Time Workshop is generating the
model.rtw file. In this method, you can call the following functions that
add fields to the model.rtw file:
ssWriteRTWParameters
ssWriteRTWParamSettings
ssWriteRTWWorkVect
ssWriteRTWStr
ssWriteRTWStrParam
ssWriteRTWScalarParam
ssWriteRTWStrVectParam
ssWriteRTWVectParam
ssWriteRTW2dMatParam
ssWriteRTWMxVectParam
8-36
mdlRTW
ssWriteRTWMx2dMatParam
This function must be enclosed in a #if defined(MATLAB_MEX_FILE)
statement.
Languages C, C++, M
See Also ssSetInputPortFrameData, ssSetOutputPortFrameData,
ssSetErrorStatus
8-37
mdlSetDefaultPortComplexSignals
Purpose Set the numeric types (real, complex, or inherited) of ports whose
numeric types cannot be determined from block connectivity
Required No
C Syntax void mdlSetDefaultPortComplexSignals(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
Description Simulink invokes this method if the block has ports whose numeric
types cannot be determined from connectivity. (This usually happens
when the block is unconnected or is part of a feedback loop.) This
method must set the numeric types of all ports whose numeric types are
not set. This method is only valid for simulation, and must be enclosed
in a #if defined(MATLAB_MEX_FILE) statement.
If the block does not implement this method and at least one port is
known to be complex, Simulink sets the unknown ports to COMPLEX_YES;
otherwise, it sets the unknown ports to COMPLEX_NO.
Languages C
See Also ssSetOutputPortComplexSignal, ssSetInputPortComplexSignal
8-38
mdlSetDefaultPortDataTypes
Purpose Set the data types of ports whose data types cannot be determined from
block connectivity
Required No
C Syntax void mdlSetDefaultPortDataTypes(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
Description Simulink invokes this method if the block has ports whose data types
cannot be determined from block connectivity. (This usually happens
when the block is unconnected or is part of a feedback loop.) This
method must set the data types of all ports whose data types are not
set. This method is only valid for simulation, and must be enclosed in a
#if defined(MATLAB_MEX_FILE) statement.
If the block does not implement this method and Simulink cannot
determine the data types of any of its ports, Simulink sets the data
types of all the ports to double. If the block does not implement this
method and Simulink cannot determine the data types of some, but not
all, of its ports, Simulink sets the unknown ports to the data type of the
port whose data type has the largest size.
Simulink invokes an error if the mdlSetDefaultPortDataType
method attempts to modify the data type of a port when the data
type was previously specified by mdlSetInputPortDataType or
mdlSetOutputPortDataType. If an S-function has multiple input or
output ports, mdlSetDefaultPortDataType should check if the data
type of a port is still dynamic before attempting to set the type. For
example, the mdlSetDefaultPortDataType uses the following lines to
check if the data type of the second input port is still unknown.
if (ssGetInputPortDataType(S, 1) == DYNAMICALLY_TYPED) {
ssSetInputPortDataType(S, 1, SS_UINT8 );
}
8-39
mdlSetDefaultPortDataTypes
Languages C
See Also ssSetOutputPortDataType, ssSetInputPortDataType
8-40
mdlSetDefaultPortDimensionInfo
Purpose Set the default dimensions of the signals accepted or emitted by an
S-functions ports
Required No
C Syntax void mdlSetDefaultPortDimensionInfo(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
Description Simulink calls this method during signal dimension propagation
when a model does not supply enough information to determine
the dimensionality of signals that can enter or leave the block
represented by S. This method should set the dimensions of any input
and output ports that are dynamically sized to default values. This
method is only valid for simulation, and must be enclosed in a #if
defined(MATLAB_MEX_FILE) statement.
If the S-function does not implement this method, Simulink tries to
find a set of dimensions that will satisfy the dimension propagation
rules implemented using mdlSetInputPortDimensionInfo and
mdlSetOutputPortDimensionInfo. This process might not be able to
produce a valid set of dimensions for S-functions with special dimension
requirements.
Simulink invokes an error if the mdlSetDefaultPortDimensionInfo
method attempts to modify the dimensions of a port when the dimensions
were previously specified by mdlSetInputPortDimensionInfo or
mdlSetOutputPortDimensionInfo. If an S-function has multiple input
or output ports, mdlSetDefaultPortDimensionInfo should check if the
dimensions of the port are still dynamic before attempting to set the
dimensions. For example, the mdlSetDefaultPortDimensionInfo uses
the following lines to check if the dimensions of the first output port are
still unknown.
if (ssGetOutputPortWidth(S, 0) == DYNAMICALLY_SIZED) {
8-41
mdlSetDefaultPortDimensionInfo
ssSetOutputPortMatrixDimensions(S, 0, 1, 1 );
}
Example See matlabroot/simulink/src/sfun_matadd.c for an example of how
to use this function.
Languages C
See Also ssSetErrorStatus, ssSetOutputPortMatrixDimensions
8-42
mdlSetInputPortComplexSignal
Purpose Set the numeric types (real, complex, or inherited) of the signals
accepted by an input port
Required No
C Syntax void mdlSetInputPortComplexSignal(SimStruct *S, int_T port,
CSignal_T csig)
C
Arguments
S
SimStruct representing an S-Function block.
port
Index of a port.
csig
Numeric type of signal, either COMPLEX_NO (real) or COMPLEX_YES
(complex).
M Syntax SetInputPortComplexSignal(s, port, typeId)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
port
Integer value specifying index of port to be set.
typeId
Integer value specifying whether the port accepts real (0) or
complex (1) signals.
Description Simulink calls this routine to set the input port numeric type for
inputs that have this attribute set to COMPLEX_INHERITED. The
input csig is the proposed numeric type for this input port. This
method is only valid for simulation, and must be enclosed in a #if
defined(MATLAB_MEX_FILE) statement.
8-43
mdlSetInputPortComplexSignal
The S-function must check whether the proposed numeric type
is a valid type for the specified port. If it is valid, the S-function
must set the numeric type of the specified input port using
ssSetInputPortComplexSignal. Otherwise, it must report an error
using ssSetErrorStatus. The S-function can also set the numeric types
of other input and output ports with inherited numeric types. Simulink
reports an error if the S-function changes the numeric type of a port
whose numeric type is known.
If the S-function does not implement this routine, Simulink assumes
that the S-function accepts a real or complex signal and sets the input
port numeric type to the specified value.
Simulink will call this method until all input ports with inherited
numeric types have their numeric types specified.
Example See matlabroot/simulink/src/sdotproduct.c for an example of how
to use this function.
Languages C, C++, M
See Also ssSetErrorStatus, ssSetInputPortComplexSignal
8-44
mdlSetInputPortDataType
Purpose Set the data types of the signals accepted by an input port
Required No
C Syntax void mdlSetInputPortDataType(SimStruct *S, int_T port, DTypeId id)
C
Arguments
S
SimStruct representing an S-Function block.
port
Index of a port.
id
Data type ID.
M Syntax SetInputPortDataType(s, port, typeId)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
port
Integer value specifying index of port to be set.
typeId
Integer value specifying ID of ports data type. Use
s.getDatatypeName(typeId) to get the data types name.
Description Simulink calls this routine to set the data type of port when port
has an inherited data type. The data type id is the proposed data
type for this port. Data type IDs for the built-in data types can be
found in matlabroot/simulink/include/simstruc_types.h. This
method is only valid for simulation, and must be enclosed in a #if
defined(MATLAB_MEX_FILE) statement.
8-45
mdlSetInputPortDataType
The S-function must check whether the specified data type is a valid
data type for the specified port. If it is a valid data type, it must set the
data type of the input port using ssSetInputPortDataType. Otherwise,
it must report an error using ssSetErrorStatus.
The S-function can also set the data types of other input and output
ports if they are unknown. Simulink reports an error if the S-function
changes the data type of a port whose data type has been set.
If the block does not implement this routine, Simulink assumes that
the block accepts any data type and sets the input port data type to
the specified value.
Simulink will call this method until all input ports with inherited data
types have their data types specified.
Languages C, M
See Also ssSetErrorStatus, ssSetInputPortDataType
8-46
mdlSetInputPortDimensionInfo
Purpose Set the dimensions of the signals accepted by an input port
Required No
C Syntax void mdlSetInputPortDimensionInfo(SimStruct *S, int_T port,
const DimsInfo_T *dimsInfo)
C
Arguments
S
SimStruct representing an S-Function block.
port
Index of a port.
dimsInfo
Structure that specifies the signal dimensions supported by the
port.
See ssSetInputPortDimensionInfo for a description of this structure.
M Syntax SetInputPortDimensions(s, port, dims)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
port
Integer value specifying index of port to be set.
dims
1-D array that specifies the signal dimensions supported by the
port, e.g., [5] for a 5-element vector signal or [3 3] for a 3-by-3
matrix signal.
Description Simulink calls this method during dimension propagation with
candidate dimensions dimsInfo for port. If the proposed dimensions
are acceptable, this method should go ahead and set the actual
8-47
mdlSetInputPortDimensionInfo
port dimensions, using ssSetInputPortDimensionInfo. If they
are unacceptable, this method should generate an error via
ssSetErrorStatus.
This method is only valid for simulation, and must be enclosed in a #if
defined(MATLAB_MEX_FILE) statement.
Note This method can set the dimensions of any other input or output
port whose dimensions derive from the dimensions of port.
By default, Simulink calls this method only if it can fully determine the
dimensionality of port from the port to which it is connected. If it cannot
completely determine the dimensionality from port connectivity, it
invokes mdlSetDefaultPortDimensionInfo. If an S-function can fully
determine the port dimensionality from partial information, the function
should set the option SS_OPTION_ALLOW_PARTIAL_DIMENSIONS_CALL
in mdlInitializeSizes, using ssSetOptions. If this option is set,
Simulink invokes mdlSetInputPortDimensionInfo even if it can
only partially determine the dimensionality of the input port from
connectivity.
Simulink will call this method until all input ports with inherited
dimensions have their dimensions specified.
Example See matlabroot/simulink/src/sfun_matadd.c for an example of how
to use this function.
Languages C, C++, M
See Also ssSetErrorStatus
8-48
mdlSetInputPortFrameData
Purpose Specify whether an input port accepts frame data
Required No
C Syntax void mdlSetInputPortFrameData(SimStruct *S, int_T port,
Frame_T frameData)
C
Arguments
S
SimStruct representing an S-Function block.
port
Index of a port.
frameData
Frame data.
M Syntax SetInputPortSamplingMode(s, port, mode)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
port
Integer value specifying the index of port whose sampling mode
is to be set.
mode
Integer value specifying the sampling mode of the port (0 =
sample, 1 = frame).
Description This method is called with the candidate frame setting (FRAME_YES
or FRAME_NO) for an input port. If the proposed setting is acceptable,
the method should set the actual frame data setting using
ssSetInputPortFrameData. If the setting is unacceptable, an error
should be generated via ssSetErrorStatus. Note that any other input or
output ports whose frame data settings are implicitly defined by virtue
8-49
mdlSetInputPortFrameData
of knowing the frame data setting of the given port can also have their
frame data settings configured. This method is only valid for simulation,
and must be enclosed in a #if defined(MATLAB_MEX_FILE) statement.
Simulink will call this method until all input ports with inherited frame
settings have their frame settings specified.
The use of frame-based signals (mode has a value of 1) requires a Signal
Processing Blockset license.
Languages C, C++, M
See Also ssSetInputPortFrameData, ssSetOutputPortFrameData,
ssSetErrorStatus
8-50
mdlSetInputPortSampleTime
Purpose Set the sample time of an input port that inherits its sample time from
the port to which it is connected
Required No
C Syntax void mdlSetInputPortSampleTime(SimStruct *S, int_T port,
real_T sampleTime, real_T offsetTime)
C
Arguments
S
SimStruct representing an S-Function block.
port
Index of a port.
sampleTime
Inherited sample time for port.
offsetTime
Inherited offset time for port.
M Syntax SetInputPortSampleTime(s, port, time)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
port
Integer value specifying the index of port whose sampling mode
is to be set.
time
Two-element array, [period offset], that specifies the period
and offset of the times that this port samples its input.
Description Simulink invokes this method with the sample time that port
inherits from the port to which it is connected. If the inherited
sample time is acceptable, this method should set the sample time of
8-51
mdlSetInputPortSampleTime
port to the inherited time, using ssSetInputPortSampleTime and
ssSetInputPortOffsetTime. If the sample time is unacceptable, this
method should generate an error via ssSetErrorStatus. Note that
any other input or output ports whose sample times are implicitly
defined by virtue of knowing the sample time of the given port can also
have their sample times set via calls to ssSetInputPortSampleTime or
ssSetOutputPortSampleTime. This method is only valid for simulation,
and must be enclosed in a #if defined(MATLAB_MEX_FILE) statement.
Simulink invokes this method until all input ports with inherited
sample times are specified.
When inherited port-based sample times are specified, the sample time
is guaranteed to be one of the following where 0.0 < period < inf
and 0.0 <= offset < period.
Sample Time Offset Time
Continuous 0.0 0.0
Discrete period offset
Constant, triggered, and variable-step sample times are not propagated
to S-functions with port-based sample times.
Generally mdlSetInputPortSampleTime is called once per port with
the input port sample time. However, there can be cases where this
function is called more than once. This happens when the simulation
engine is converting continuous sample times to continuous but fixed
in minor steps sample times. When this occurs, the original values of
the sample times specified in mdlInitializeSizes are restored before
this method is called again.
The final sample time specified at the port can be different from (but
equivalent to) the sample time specified by this method. This occurs
when
The model uses a fixed-step solver and the port has a continuous but
fixed in minor step sample time. In this case, Simulink converts the
sample time to the fundamental sample time for the model.
8-52
mdlSetInputPortSampleTime
Simulink adjusts the sample time to be as numerically sound as
possible. For example, Simulink converts [0.2499999999999, 0]
to [0.25, 0].
The S-function can examine the final sample times in
mdlInitializeSampleTimes.
Languages C, C++, M
See Also ssSetInputPortSampleTime, ssSetOutputPortSampleTime,
mdlInitializeSampleTimes
8-53
mdlSetInputPortWidth
Purpose Set the width of an input port that accepts 1-D (vector) signals
Required No
C Syntax void mdlSetInputPortWidth(SimStruct *S, int_T port, int_T width)
C
Arguments
S
SimStruct representing an S-Function block.
port
Index of a port.
width
Width of signal.
Description This method is called with the candidate width for a dynamically
sized port. If the proposed width is acceptable, the method should
set the actual port width using ssSetInputPortWidth. If the size is
unacceptable, an error should be generated via ssSetErrorStatus. Note
that any other dynamically sized input or output ports whose widths
are implicitly defined by virtue of knowing the width of the given port
can also have their widths set via calls to ssSetInputPortWidth or
ssSetOutputPortWidth. This method is only valid for simulation, and
must be enclosed in a #if defined(MATLAB_MEX_FILE) statement.
Simulink invokes this method until all dynamically sized input ports
are configured.
Languages C
See Also ssSetInputPortWidth, ssSetOutputPortWidth, ssSetErrorStatus
8-54
mdlSetOutputPortComplexSignal
Purpose Set the numeric types (real, complex, or inherited) of the signals
accepted by an output port
Required No
C Syntax void mdlSetOutputPortComplexSignal(SimStruct *S, int_T port,
CSignal_T csig)
C
Arguments
S
SimStruct representing an S-Function block.
port
Index of a port.
csig
Numeric type of signal, either COMPLEX_NO (real) or COMPLEX_YES
(complex).
M Syntax SetOutputPortComplexSignal(s, port, typeId)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
port
Integer value specifying the index of port to be set.
typeId
Integer value specifying whether the port produces real (0) or
complex (1) signals.
Description Simulink calls this routine to set the output port numeric type for
outputs that have this attribute set to COMPLEX_INHERITED. The
input argument csig is the proposed numeric type for this output
port. The S-function must check whether the specified numeric type
is a valid type for the specified port. If it is valid, the S-function
8-55
mdlSetOutputPortComplexSignal
must set the numeric type of the specified output port using
ssSetOutputPortComplexSignal. Otherwise, it must report an error,
using ssSetErrorStatus. The S-function can also set the numeric types
of other input and output ports with unknown numeric types. Simulink
reports an error if the S-function changes the numeric type of a port
whose numeric type is known. This method is only valid for simulation,
and must be enclosed in a #if defined(MATLAB_MEX_FILE) statement.
If the S-function does not implement this routine, Simulink assumes
that the S-function accepts a real or complex signal and sets the output
port numeric type to the specified value.
Simulink will call this method until all output ports with inherited
numeric types have their numeric types specified.
Example See matlabroot/simulink/src/sdotproduct.c for an example of how
to use this function.
Languages C, C++, M
See Also ssSetOutputPortComplexSignal, ssSetErrorStatus
8-56
mdlSetOutputPortDataType
Purpose Set the data type of the signals emitted by an output port
Required No
C Syntax void mdlSetOutputPortDataType(SimStruct *S, int_T port,
DTypeId id)
C
Arguments
S
SimStruct representing an S-Function block.
port
Index of an output port.
id
Data type ID.
M Syntax SetOutputPortDataType(s, port, typeId)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
port
Integer value specifying index of port to be set.
typeId
Integer value specifying ID of ports data type. Use
s.getDatatypeName(typeId) to get the data types name.
Description Simulink calls this routine to set the data type of port when port has
an inherited data type. The data type IDid is the proposed data type
for this port. Data type IDs for the built-in data types can be found in
matlabroot/simulink/include/simstruc_types.h. The S-function
must check whether the specified data type is a valid data type for the
specified port. If it is a valid data type, it must set the data type of port
using ssSetOutputPortDataType. Otherwise, it must report an error,
8-57
mdlSetOutputPortDataType
using ssSetErrorStatus. This method is only valid for simulation, and
must be enclosed in a #if defined(MATLAB_MEX_FILE) statement.
The S-function can also set the data types of other input and output
ports if their data types have not been set. Simulink reports an error
if the S-function changes the data type of a port whose data type has
been set.
If the block does not implement this method, Simulink assumes that
the block supports any data type and sets the output port data type to
the specified value.
Simulink will call this method until all output ports with inherited data
types have their data types specified.
Languages C, C++, M
See Also ssSetOutputPortDataType, ssSetErrorStatus
8-58
mdlSetOutputPortDimensionInfo
Purpose Set the dimensions of the signals accepted by an output port
Required No
C Syntax void mdlSetOutputPortDimensionInfo(SimStruct *S, int_T port,
const DimsInfo_T *dimsInfo)
C
Arguments
S
SimStruct representing an S-Function block or a Simulink model.
port
Index of a port.
dimsInfo
Structure that specifies the signal dimensions supported by port.
See ssSetInputPortDimensionInfo for a description of this structure.
M Syntax SetOutputPortDimensions(s, port, dims)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
port
Integer value specifying the index of the port to be set.
dims
1-D array that specifies the signal dimensions supported by the
port, e.g., [5] for a 5-element vector signal or [3 3] for a 3-by-3
matrix signal.
Description Simulink calls this method with candidate dimensions dimsInfo
for port. If the proposed dimensions are acceptable, this method
should go ahead and set the actual port dimensions, using
ssSetOutputPortDimensionInfo. If they are unacceptable, this
8-59
mdlSetOutputPortDimensionInfo
method should generate an error via ssSetErrorStatus. This
method is only valid for simulation, and must be enclosed in a #if
defined(MATLAB_MEX_FILE) statement.
Note This method can set the dimensions of any other input or output
port whose dimensions derive from the dimensions of port.
By default, Simulink calls this method only if it can fully determine the
dimensionality of port from the port to which it is connected. If it cannot
completely determine the dimensionality from port connectivity, it
invokes mdlSetDefaultPortDimensionInfo. If an S-function can fully
determine the port dimensionality from partial information, the function
should set the option SS_OPTION_ALLOW_PARTIAL_DIMENSIONS_CALL
in mdlInitializeSizes, using ssSetOptions. If this option is set,
Simulink invokes mdlSetOutputPortDimensionInfo even if it can
only partially determine the dimensionality of the output port from
connectivity. Simulink will call this method until all output ports with
inherited dimensions have their dimensions specified.
Example See matlabroot/simulink/src/sfun_matadd.c for an example of how
to use this function.
Languages C, C++, M
See Also ssSetErrorStatus, ssSetOutputPortDimensionInfo
8-60
mdlSetOutputPortSampleTime
Purpose Set the sample time of an output port that inherits its sample time from
the port to which it is connected
Required No
C Syntax void mdlSetOutputPortSampleTime(SimStruct *S, int_T port,
real_T sampleTime, real_T offsetTime)
C
Arguments
S
SimStruct representing an S-Function block.
port
Index of a port.
sampleTime
Inherited sample time for port.
offsetTime
Inherited offset time for port.
M Syntax SetOutputPortSampleTime(s, port, time)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
port
Integer value specifying the index of port whose sampling mode
is to be set.
time
Two-element array, [period offset], that specifies the period
and offset of the times that this port produces output.
Description Simulink calls this method with the sample time that port inherits
from the port to which it is connected. If the inherited sample time
is acceptable, this method should set the sample time of port to the
8-61
mdlSetOutputPortSampleTime
inherited sample time and offset time, using ssSetOutputPortSampleTime
and ssSetOutputPortOffsetTime, or
pd = s.OutputPort(port);
pd.SampleTime = time;
in the case of a Level-2 M-file S-function.
If the inherited sample time is unacceptable, this method should
generate an error via ssSetErrorStatus. Note that this method can set
the sample time of any other input or output port whose sample time
derives fromthe sample time of port, using ssSetInputPortSampleTime
or ssSetOutputPortSampleTime or the SampleTime property of the
Simulink.BlockPortData object associated with the port in the case
of Level-2 M-file S-functions. This method is only valid for simulation,
and must be enclosed in a #if defined(MATLAB_MEX_FILE) statement
when used in a C-MEX S-function.
Normally, sample times are propagated forward; however, if sources
feeding this block have inherited sample times, Simulink might
choose to back-propagate known sample times to this block. When
back-propagating sample times, this method is called in succession for
all inherited output port signals.
See mdlSetInputPortSampleTime for more information about when this
method is called.
Languages C, M
See Also ssSetOutputPortSampleTime, ssSetErrorStatus,
ssSetInputPortSampleTime, ssSetOutputPortSampleTime,
mdlSetInputPortSampleTime, Simulink.MSFcnRunTimeBlock,
Simulink.BlockPortData
8-62
mdlSetOutputPortWidth
Purpose Set the width of an output port that outputs 1-D (vector) signals
Required No
C Syntax void mdlSetOutputPortWidth(SimStruct *S, int_T port, int_T width)
C
Arguments
S
SimStruct representing an S-Function block.
port
Index of a port.
width
Width of signal.
Description This method is called with the candidate width for a dynamically sized
port. If the proposed width is acceptable, the method should go ahead
and set the actual port width, using ssSetOutputPortWidth. If the size
is unacceptable, an error should be generated via ssSetErrorStatus.
Note that any other dynamically sized input or output ports whose
widths are implicitly defined by virtue of knowing the width of the given
port can also have their widths set via calls to ssSetInputPortWidth or
ssSetOutputPortWidth. This method is only valid for simulation, and
must be enclosed in a #if defined(MATLAB_MEX_FILE) statement.
Languages C
See Also ssSetInputPortWidth, ssSetOutputPortWidth, ssSetErrorStatus
8-63
mdlSetWorkWidths
Purpose Specify the sizes of the work vectors and create the run-time parameters
required by this S-function
Required No
C Syntax void mdlSetWorkWidths(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax PostPropagationSetup(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description Simulink calls this optional method to enable this S-function to set the
sizes of state and work vectors that it needs to store global data and
to create run-time parameters (see Run-Time Parameters on page
7-7). Simulink invokes this method after it has determined the input
port width, output port width, and sample times of the S-function.
This allows the S-function to size the state and work vectors based
on the number and sizes of inputs and outputs and/or the number
of sample times. This method specifies the state and work vector
sizes via the macros ssGetNumContStates, ssSetNumDiscStates,
ssSetNumRWork, ssSetNumIWork, ssSetNumPWork, ssSetNumModes, and
ssSetNumNonsampledZCs.
A C-MEX S-function needs to implement this method only if it does
not know the sizes of all the work vectors it requires when Simulink
invokes the functions mdlInitializeSizes method. If this S-function
implements mdlSetWorkWidths, it should initialize the sizes of any work
vectors that it needs to DYNAMICALLY_SIZED in mdlInitializeSizes,
even for those whose exact size it knows at that point. The S-function
8-64
mdlSetWorkWidths
should then specify the actual size in mdlSetWorkWidths. This
method is only valid for simulation, and must be enclosed in a #if
defined(MATLAB_MEX_FILE) statement.
A Level-2 M-file S-function must implement this method if any Dwork
vectors are used in the S-function. In the case of M-file S-functions, this
method sets the number of Dwork vectors and initializes their attributes.
For example, the following code in the PostPropagationSetup method
specifies the usage type for the Dwork vector:
block.DWork(1).UsageType = type;
where block is an instance of the Simulink.MSFcnRunTimeBlock class
representing the S-Function block and type is one of the following:
DWork
DState
Scratch
Mode
For a full example of a Level-2 M-file S-function using Dwork vectors,
see the file matlabroot/toolbox/simulink/simdemos/adapt_lms.m
used in the Simulink model sldemo_msfcn_lms.mdl.
Languages Ada, C, M
See Also mdlInitializeSizes
8-65
mdlSimStatusChange
Purpose Respond to a pause or resumption of the simulation of the model that
contains this S-function
Required No
C Syntax void mdlSimStatusChange(SimStruct *S,
ssSimStatusChangeType simStatus)
C
Arguments
S
SimStruct representing an S-Function block.
simStatus
Status of the simulation, either SIM_PAUSE or SIM_CONTINUE.
M Syntax SimStatusChange(s, status)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
status
Status of the simulation, either 0 when paused or 1 when
continued.
Description Simulink calls this routine when a simulation of the model containing S
pauses or resumes. This method is only valid for simulation, and must
be enclosed in a #if defined(MATLAB_MEX_FILE) statement.
Example #if defined(MATLAB_MEX_FILE)
#define MDL_SIM_STATUS_CHANGE
static void mdlSimStatusChange(SimStruct *S,
ssSimStatusChangeType simStatus) {
if (simStatus == SIM_PAUSE) {
slPrintf("Pause has been called! \n");
} else if (simStatus == SIM_CONTINUE) {
8-66
mdlSimStatusChange
slPrintf("Continue has been called! \n");
}
}
#endif
Languages C
8-67
mdlStart
Purpose Initialize the state vectors of this S-function
Required No
C Syntax void mdlStart(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax Start(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description Simulink invokes this optional method at the beginning of a simulation.
It should initialize the continuous and discrete states, if any, of this
S-Function block. Use ssGetContStates and/or ssGetDiscStates to
get the states. This method can also perform any other initialization
activities that this S-function requires, such as allocating memory or
setting up user data.
Languages Ada, C, M
Example See matlabroot/simulink/src/sfun_directlook.c for an example of
how to use this function.
See Also mdlInitializeConditions, ssGetContStates, ssGetDiscStates
8-68
mdlTerminate
Purpose Perform any actions required at termination of the simulation
Required Yes
C Syntax void mdlTerminate(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax Terminate(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description This method should perform any actions, such as freeing memory, that
must be performed at the end of simulation or when an S-Function
block is destroyed (e.g., when it is deleted from a model). The option
SS_OPTION_CALL_TERMINATE_ON_EXIT determines whether Simulink
invokes this method. If this option is not set, Simulink invokes
mdlTerminate at the end of the simulation only if the mdlStart method
of at least one block in the model has executed without error during
the simulation. If this option is set, Simulink always invokes the
mdlTerminate method at the end of a simulation run and whenever
it destroys a block.
Use the UNUSED_ARG macro if the mdlTerminate function does not
perform any actions that require the SimStruct S to indicate that the
S input argument is required but not used in the body of the callback.
To do this, insert the line
UNUSED_ARG(S)
after any declarations in mdTerminate.
8-69
mdlTerminate
Note When generating code for a noninlined S-function that
contains this method, make sure the method is not wrapped in a #if
defined(MATLAB_MEX_FILE) statement. For example:
#if defined(MATLAB_MEX_FILE)
static void mdlTerminate(SimStruct *S)
{
/* Add mdlTerminate code here *
}
#endif
The define statement makes the mdlTerminate method available only
to a MATLAB MEX-file. If the S-function is not inlined, Real-Time
Workshop cannot use this method, resulting in link or run-time errors.
Example Suppose your S-function allocates blocks of memory in mdlStart and
saves pointers to the blocks in a PWork vector. The following code
fragment would free this memory.
{
int i;
for (i = 0; i<ssGetNumPWork(S); i++) {
if (ssGetPWorkValue(S,i) != NULL) {
free(ssGetPWorkValue(S,i));
}
}
}
Languages Ada, C, M
See Also ssSetOptions
8-70
mdlUpdate
Purpose Update a blocks states
Required No
C Syntax void mdlUpdate(SimStruct *S, int_T tid)
C
Arguments
S
SimStruct representing an S-Function block.
tid
Task ID.
M Syntax Update(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description Simulink invokes this optional method at each major simulation time
step. The method should compute the S-functions states at the current
time step and store the states in the S-functions state vector. The
method can also perform any other tasks that the S-function needs to
perform at each major time step.
Use this code if your S-function has one or more discrete states or does
not have direct feedthrough.
The reason for this is that most S-functions that do not have discrete
states but do have direct feedthrough do not have update functions.
Therefore, Simulink is able to eliminate the need for the extra call in
these circumstances.
If your S-function needs to have its mdlUpdate routine called and
it does not satisfy either of the above two conditions, specify that it
has a discrete state, using the ssSetNumDiscStates macro in the
mdlInitializeSizes function.
8-71
mdlUpdate
The tid (task ID) argument specifies the task running when the
mdlOutputs routine is invoked. You can use this argument in the
mdlUpdate routine of a multirate S-Function block to encapsulate
task-specific blocks of code (see Multirate S-Function Blocks on page
7-37).
Use the UNUSED_ARG macro if the S-function does not contain
task-specific blocks of code to indicate that the tid input argument is
required but not used in the body of the callback. To do this, insert
the line
UNUSED_ARG(tid)
after the declarations in mdlUpdate.
Note When generating code for a noninlined S-function that
contains this method, make sure the method is not wrapped in a #if
defined(MATLAB_MEX_FILE) statement. For example:
#define MDL_UPDATE
#if defined(MDL_UPDATE) && defined(MATLAB_MEX_FILE)
static void mdlUpdate(SimStruct *S)
{
/* Add mdlUpdate code here *
}
#endif
The define statement makes the mdlUpdate method available only
to a MATLAB MEX-file. If the S-function is not inlined, Real-Time
Workshop cannot use this method, resulting in link or run-time errors.
Example For an example that uses this function to update discrete states, see
matlabroot/simulink/src/dsfunc.c. For an example that uses this
function to update the transfer function coefficients of a time-varying
continuous transfer function, see matlabroot/simulink/src/stvctf.c.
8-72
mdlUpdate
Languages Ada, C, C++, M
See Also mdlDerivatives, ssGetContStates, ssGetDiscStates
8-73
mdlZeroCrossings
Purpose Update zero-crossing vector
Required No
C Syntax void mdlZeroCrossings(SimStruct *S)
C
Arguments
S
SimStruct representing an S-Function block.
M Syntax ZeroCrossings(s)
M
Arguments
s
Instance of Simulink.MSFcnRunTimeBlock class representing the
S-Function block.
Description An S-function needs to provide this optional method only if it does
zero-crossing detection. Implementing zero-crossing detection typically
requires using the zero-crossing and mode work vectors to determine
when a zero crossing occurs and how the S-functions outputs should
respond to this event. The mdlZeroCrossings method should update
the S-functions zero-crossing vector, using ssGetNonsampledZCs.
You can use the optional mdlZeroCrossings routine when your
S-function has registered the CONTINUOUS_SAMPLE_TIME and has
nonsampled zero crossings (ssGetNumNonsampledZCs(S) > 0). The
mdlZeroCrossings routine is used to provide Simulink with signals
that are to be tracked for zero crossings. These are typically
Continuous signals entering the S-function
Internally generated signals that cross zero when a discontinuity
would normally occur in mdlOutputs
Thus, the zero-crossing signals are used to locate the discontinuities and
end the current time step at the point of the zero crossing. To provide
8-74
mdlZeroCrossings
Simulink with zero-crossing signals, mdlZeroCrossings updates the
ssGetNonsampleZCs(S) vector.
Example For an example, see matlabroot/simulink/src/sfun_zc_sat.c. A
detailed description of this example can be found in Work Vectors and
Zero Crossings on page 7-44 in the Simulink documentation.
Languages C, C++, M
See Also mdlInitializeSizes, ssGetNonsampledZCs
8-75
mdlZeroCrossings
8-76
9
SimStruct Functions By
Category
Introduction (p. 9-2) Overview of SimStruct macros and
functions.
SimStruct Macros and Functions
Listed by Usage (p. 9-3)
SimStruct functions listed by usage.
9 SimStruct Functions By Category
Introduction
In this section...
About SimStruct Functions on page 9-2
Language Support on page 9-2
The SimStruct on page 9-2
About SimStruct Functions
Simulink provides a set of functions for accessing the fields of an S-functions
simulation data structure (SimStruct). S-function callback methods use these
functions to store and retrieve information about an S-function.
Language Support
Some SimStruct functions are available only in some of the languages
supported by Simulink. The reference page for each SimStruct macro or
function lists the languages in which it is available. If the SimStruct function
is available in C, the reference page gives its C syntax. Otherwise, it gives
its syntax in the language in which it is available.
Note Most SimStruct functions available in C are implemented as C macros.
The SimStruct
The file matlabroot/simulink/include/simstruc.h is a C language header
file that defines the Simulink data structure and the SimStruct access
macros. It encapsulates all the data relating to the model or S-function,
including block parameters and outputs.
There is one SimStruct data structure allocated for the Simulink model.
Each S-function in the model has its own SimStruct associated with it.
The organization of these SimStructs is much like a directory tree. The
SimStruct associated with the model is the root SimStruct. The SimStructs
associated with the S-functions are the child SimStructs.
9-2
SimStruct Macros and Functions Listed by Usage
SimStruct Macros and Functions Listed by Usage
SimStruct Macros and Functions Listed by Usage
Data Type
Dialog Box Parameters
Error Handling and Status
Function Call
I/O Port Signal Specification
I/O Port Signal Dimensions
I/O Port Signal Access on page 9-10
Run-Time Parameters on page 9-12
Sample Time on page 9-13
Simulation Information on page 9-15
State and Work Vector on page 9-17
Miscellaneous
Real-Time Workshop
Data Type
Macro Description
ssGetDataTypeId Get the ID for a data type.
ssGetDataTypeIdAliasedThruTo Get the ID for the built-in data type
associated with a data type alias.
ssGetDataTypeName Get a data types name.
ssGetDataTypeSize Get a data types size.
ssGetDataTypeZero Get the zero representation of a data
type.
ssGetInputPortDataType Get the data type of an input port.
9-3
9 SimStruct Functions By Category
Data Type (Continued)
Macro Description
ssGetNumDataTypes Get the number of data types defined by
an S-function or the model.
ssGetOutputPortDataType Get the data type of an output port.
ssGetOutputPortSignal Get an output signal of any type except
double.
ssRegisterDataType Register a data type.
ssSetDataTypeSize Specify the size of a data type.
ssSetDataTypeZero Specify the zero representation of a data
type.
ssSetInputPortDataType Specify the data type of signals accepted
by an input port.
ssSetOutputPortDataType Specify the data type of an output port.
Dialog Box Parameters
Macro Description
ssGetDTypeIdFromMxArray Get the Simulink data type of a dialog
parameter.
ssGetNumParameters Get the number of parameters that this
block has (Ada only).
ssGetNumSFcnParams Get the number of parameters that an
S-function expects.
ssGetSFcnParam Get a parameter entered by a user in the
S-Function block dialog box.
ssGetSFcnParamsCount Get the actual number of parameters
specified by the user.
ssSetNumSFcnParams Set the number of parameters that an
S-function expects.
ssSetParameterName Set the name of a parameter (Ada only).
9-4
SimStruct Macros and Functions Listed by Usage
Dialog Box Parameters (Continued)
Macro Description
ssSetParameterTunable Set the tunability of a parameter (Ada only).
ssSetSFcnParamNotTunable Obsolete.
ssSetSFcnParamTunable Specify the tunability of a dialog box
parameter.
Error Handling and Status
Macro Description
ssGetErrorStatus Get a string that identifies the last error.
ssPrintf Print a variable-content msg.
ssSetErrorStatus Report errors.
ssWarning Display a warning message.
Function Call
Macro Description
ssCallSystemWithTid Execute a function-call subsystem connected
to an S-function.
ssDisableSystemWithTid Disable a function-call subsystem connected
to this S-function block.
ssEnableSystemWithTid Enable a function-call subsystem connected
to this S-function.
ssGetExplicitFCSSCtrl Determine whether this S-function explicitly
enables and disables the function-call
subsystem that it invokes.
9-5
9 SimStruct Functions By Category
Function Call (Continued)
Macro Description
ssSetCallSystemOutput Specify that an output port element issues a
function call.
ssSetExplicitFCSSCtrl Specify whether an S-function explicitly
enables and disables the function-call
subsystem that it calls.
Input and Output Ports
I/O Port Signal Specification
Macro Description
ssGetInputPortComplexSignal Get the numeric type (complex
or real) of an input port.
ssGetInputPortDataType Get the data type of an input
port.
ssGetInputPortDirectFeedThrough Determine whether an input
port has direct feedthrough.
ssGetInputPortFrameData Determine whether a port
accepts signal frames.
ssGetInputPortOffsetTime Determine the offset time of an
input port.
ssGetInputPortRequiredContiguous Determine whether the signal
elements entering a port must be
contiguous.
ssGetInputPortSampleTime Determine the sample time of an
input port.
ssGetInputPortSampleTimeIndex Get the sample time index of an
input port.
ssGetOutputPortComplexSignal Get the numeric type (complex
or real) of an output port.
9-6
SimStruct Macros and Functions Listed by Usage
I/O Port Signal Specification (Continued)
Macro Description
ssGetOutputPortDataType Get the data type of an output
port.
ssGetOutputPortFrameData Determine whether a port
outputs signal frames.
ssGetOutputPortOffsetTime Determine the offset time of an
output port.
ssGetOutputPortSampleTime Determine the sample time of an
output port.
ssSetInputPortComplexSignal Set the numeric type (real or
complex) of an input port.
ssSetInputPortDataType Set the data type of an input
port.
ssSetInputPortDirectFeedThrough Specify that an input port is a
direct-feedthrough port.
ssSetInputPortFrameData Specify whether a port accepts
signal frames.
ssSetInputPortOffsetTime Specify the sample time offset
for an input port.
ssSetInputPortRequiredContiguous Specify that the signal elements
entering a port must be
contiguous.
ssSetInputPortSampleTime Set the sample time of an input
port.
ssSetNumInputPorts Set the number of input ports on
an S-Function block.
ssSetNumOutputPorts Specify the number of output
ports on an S-Function block.
ssSetOneBasedIndexInputPort Specify that an input port
expects one-based indices.
9-7
9 SimStruct Functions By Category
I/O Port Signal Specification (Continued)
Macro Description
ssSetOneBasedIndexOutputPort Specify that an output port emits
one-based indices.
ssSetOutputPortComplexSignal Specify the numeric type (real or
complex) of this port.
ssSetOutputPortDataType Specify the data type of an
output port.
ssSetOutputPortFrameData Specify whether a port outputs
framed data.
ssSetOutputPortOffsetTime Specify the sample time offset
value of an output port.
ssSetOutputPortSampleTime Specify the sample time of an
output port.
ssSetZeroBasedIndexInputPort Specify that an input port
expects zero-based indices.
ssSetZeroBasedIndexOutputPort Specify that an output port emits
zero-based indices.
I/O Port Signal Dimensions
Macro Description
ssAllowSignalsWithMoreThan2D Enable S-function to work with
multidimensional signals.
ssGetInputPortDimensions Get the dimensions of the signal
accepted by an input port.
ssGetInputPortNumDimensions Get the dimensionality of the
signals accepted by an input
port.
ssGetInputPortWidth Determine the width of an input
port.
9-8
SimStruct Macros and Functions Listed by Usage
I/O Port Signal Dimensions (Continued)
Macro Description
ssGetOutputPortDimensions Get the dimensions of the signal
leaving an output port.
ssGetOutputPortNumDimensions Get the number of dimensions of
an output port.
ssGetOutputPortWidth Determine the width of an
output port.
ssSetInputPortDimensionInfo Set the dimensionality of an
input port.
ssSetInputPortMatrixDimensions Specify dimension information
for an input port that accepts
matrix signals.
ssSetInputPortVectorDimension Specify dimension information
for an input port that accepts
vector signals.
ssSetInputPortWidth Set the width of a 1-D (vector)
input port.
ssSetOutputPortDimensionInfo Specify the dimensionality of an
output port.
ssSetOutputPortMatrixDimensions Specify dimension information
for an output port that emits
matrix signals.
ssSetOutputPortVectorDimension Specify dimension information
for an output port that emits
vector signals.
ssSetOutputPortWidth Specify the width of a 1-D
(vector) output port.
9-9
9 SimStruct Functions By Category
I/O Port Signal Dimensions (Continued)
Macro Description
ssSetOutputPortMatrixDimensions Specify the dimensions of a 2-D
(matrix) signal.
ssSetVectorMode Specify the vector mode that an
S-function supports.
I/O Port Signal Access
Macro Description
ssGetInputPortBufferDstPort Determine the output port that
is overwriting an input ports
memory buffer.
ssGetInputPortConnected Determine whether an
S-Function block port is
connected to a nonvirtual block.
ssGetInputPortOptimOpts Determine the reusability
setting of the memory allocated
to the input port of an S-function.
ssGetInputPortOverWritable Determine whether an input
port can be overwritten.
ssGetInputPortRealSignal Get the address of a real,
contiguous signal entering an
input port.
ssGetInputPortRealSignalPtrs Access the signal elements
connected to an input port.
ssGetInputPortSignal Get the address of a contiguous
signal entering an input port.
ssGetInputPortSignalAddress Get the address of an input ports
signal (Ada only).
ssGetInputPortSignalPtrs Get pointers to input signal
elements of type other than
double.
9-10
SimStruct Macros and Functions Listed by Usage
I/O Port Signal Access (Continued)
Macro Description
ssGetNumInputPorts Can be used in any routine
(except mdlInitializeSizes) to
determine how many input ports
a block has.
ssGetNumOutputPorts Can be used in any routine
(except mdlInitializeSizes)
to determine how many output
ports a block has.
ssGetOutputPortConnected Determine whether an output
port is connected to a nonvirtual
block.
ssGetOutputPortBeingMerged Determine whether the output
of this block is connected to a
Merge block.
ssGetOutputPortOptimOpts Determine the reusability of the
memory allocated to the output
port of an S-function.
ssGetOutputPortRealSignal Access the elements of a signal
connected to an output port.
ssGetOutputPortSignal Get the vector of signal elements
emitted by an output port.
ssGetOutputPortSignalAddress Get the address of an output
ports signal (Ada only).
ssSetInputPortOptimOpts Specify the reusability of the
memory allocated to the input
port of an S-function.
ssSetInputPortOverWritable Specify whether an input port is
overwritable by an output port.
9-11
9 SimStruct Functions By Category
I/O Port Signal Access (Continued)
Macro Description
ssSetOutputPortOptimOpts Specify the reusability of the
memory allocated to the output
port of an S-function.
ssSetOutputPortOverwritesInputPort Specify whether an output port
can share its memory buffer with
an input port.
Run-Time Parameters
These macros allow you to create, update, and access run-time parameters
corresponding to a blocks dialog parameters.
Run-Time Parameters
Macro Description
ssGetNumRunTimeParams Get the number of
run-time parameters
created by this
S-function.
ssGetRunTimeParamInfo Get the attributes of
a specified run-time
parameter.
ssRegAllTunableParamsAsRunTimeParams Register all tunable
dialog parameters as
run-time parameters.
ssRegDlgParamAsRunTimeParam Register a run-time
parameter.
ssSetNumRunTimeParams Specify the number of
run-time parameters
to be created by this
S-function.
9-12
SimStruct Macros and Functions Listed by Usage
Run-Time Parameters (Continued)
Macro Description
ssSetRunTimeParamInfo Specify the attributes
of a specified run-time
parameter.
ssUpdateAllTunableParamsAsRunTimeParams Update all run-time
parameters
corresponding to
tunable dialog
parameters.
ssUpdateDlgParamAsRunTimeParam Update a run-time
parameter.
ssUpdateRunTimeParamData Update the value of
a specified run-time
parameter.
ssUpdateRunTimeParamInfo Update the attributes
of a specified run-time
parameter from the
attributes of the
corresponding dialog
parameters.
Sample Time
Macro Description
ssGetInputPortSampleTime Determine the sample time of an
input port.
ssGetInputPortSampleTimeIndex Get the sample time index of an
input port.
ssGetNumSampleTimes Get the number of sample times an
S-function has.
ssGetOffsetTime Determine one of an S-functions
sample time offsets.
9-13
9 SimStruct Functions By Category
Sample Time (Continued)
Macro Description
ssGetOutputPortSampleTime Determine the sample time of an
output port.
ssGetPortBasedSampleTimeBlockIs-
Triggered
Determine whether a block that
uses port-based sample times
resides in a triggered subsystem.
ssGetSampleTime Determine one of an S-functions
sample times.
ssGetSampleTimeOffset Get the offset of the current sample
time (Ada only).
ssGetSampleTimePeriod Get the period of the current sample
time (Ada only).
ssGetTNext Get the time of the next sample
hit in a discrete S-function with a
variable sample time.
ssIsContinuousTask Determine whether a specified rate
is the continuous rate.
ssIsSampleHit Determine the sample rate at which
an S-function is operating.
ssIsSpecialSampleHit Determine whether the current
sample time hits two specified
rates.
ssSampleAndOffsetAreTriggered Determine whether a sample time
and offset value pair indicate a
triggered sample time.
ssSetInputPortSampleTime Set the sample time of an input
port.
ssSetModelReferenceSampleTime-
InheritanceRule
Specify whether use of an
S-function in a submodel prevents
the submodel from inheriting its
sample time from the parent model.
9-14
SimStruct Macros and Functions Listed by Usage
Sample Time (Continued)
Macro Description
ssSetNumSampleTimes Set the number of sample times an
S-function has.
ssSetOffsetTime Specify the offset of a sample time.
ssSetSampleTime Specify a sample time for an
S-function.
ssSetTNext Specify the time of the next sample
hit in an S-function.
Simulation Information
Macro Description
ssGetAbsTol Get the absolute tolerances used by a models
variable-step solver.
ssGetBlockReduction Determine whether a block has requested
block reduction before the simulation has
begun and whether it has actually been
reduced after the simulation loop has begun.
ssGetErrorStatus Get a string that identifies the last error.
ssGetInlineParameters Determine whether the user has set the
inline parameters option for the model
containing this S-function.
ssGetSimMode Determine the context in which an
S-function is being invoked: normal
simulation, external-mode simulation,
model editor, etc.
ssGetSolverMode Get the solver mode being used to solve the
S-function.
ssGetSolverName Get the name of the solver being used for
the simulation.
9-15
9 SimStruct Functions By Category
Simulation Information (Continued)
Macro Description
ssGetStateAbsTol Get the absolute tolerance used by the
models variable-step solver for a specified
state.
ssGetStopRequested Get the value of the simulation stop
requested flag.
ssGetT Get the current base simulation time.
ssGetTaskTime Get the current time for a task.
ssGetTFinal Get the end time of the current simulation.
ssGetTNext Get the time of the next sample hit.
ssGetTStart Get the start time of the current simulation.
ssIsFirstInitCond Determine whether this is the first call to
mdlInitializeConditions.
ssIsMajorTimeStep Determine whether the current time step is
a major time step.
ssIsMinorTimeStep Determine whether the current time step is
a minor time step.
ssIsVariableStepSolver Determine whether the current solver is a
variable-step solver.
ssSetBlockReduction Request that Simulink attempt to reduce a
block.
ssSetSolverNeedsReset Ask Simulink to reset the solver.
ssSetStopRequested Ask Simulink to terminate the simulation at
the end of the current time step.
9-16
SimStruct Macros and Functions Listed by Usage
State and Work Vector
These macros enable an S-function to access and set the S-functions work
vectors.
State and Work Vector
Macro Description
ssGetContStateAddress Get the address of a blocks continuous state
vector.
ssGetContStates Get an S-functions continuous states.
ssGetDiscStates Get an S-functions discrete states.
ssGetDWork Get a DWork vector.
ssGetDWorkComplexSignal Determine whether the elements of a
data type work vector are real or complex
numbers.
ssGetDWorkDataType Get the data type of a data type work vector.
ssGetDWorkName Get the name of a data type work vector.
ssGetDWorkUsedAsDState Determine whether a data type work vector
is used as a discrete state vector.
ssGetDWorkWidth Get the size of a data type work vector.
ssGetdX Get the derivatives of the continuous states
of an S-function.
ssGetIWork Get an S-functions integer-valued (int_T)
work vector.
ssGetIWorkValue Get a value from a blocks integer work
vector.
ssGetModeVector Get an S-functions mode work vector.
ssGetModeVectorValue Get an element of a blocks mode vector.
ssGetNonsampledZCs Get an S-functions zero-crossing signals
vector.
ssGetNumContStates Determine the number of continuous states
that an S-function has.
9-17
9 SimStruct Functions By Category
State and Work Vector (Continued)
Macro Description
ssGetNumDiscStates Determine the number of discrete states
that an S-function has.
ssGetNumDWork Get the number of data type work vectors
used by a block.
ssGetNumIWork Get the size of an S-functions integer work
vector.
ssGetNumModes Determine the size of an S-functions mode
vector.
ssGetNumNonsampledZCs Determine the number of nonsampled zero
crossings that an S-function detects.
ssGetNumPWork Determine the size of an S-functions pointer
work vector.
ssGetNumRWork Determine the size of an S-functions
real-valued (real_T) work vector.
ssGetPWork Get an S-functions pointer (void *) work
vector.
ssGetPWorkValue Get a pointer from a pointer work vector.
ssGetRealDiscStates Get the real (real_T) values of an
S-functions discrete state vector.
ssGetRWork Get an S-functions real-valued (real_T)
work vector.
ssGetRWorkValue Get an element of an S-functions real-valued
work vector.
ssSetDWorkComplexSignal Specify whether the elements of a data type
work vector are real or complex.
ssSetDWorkDataType Specify the data type of a data type work
vector.
ssSetDWorkName Specify the name of a data type work vector.
9-18
SimStruct Macros and Functions Listed by Usage
State and Work Vector (Continued)
Macro Description
ssSetDWorkUsedAsDState Specify that a data type work vector is used
as a discrete state vector.
ssSetDWorkWidth Specify the width of a data type work vector.
ssSetIWorkValue Set an element of a blocks integer work
vector.
ssSetModeVectorValue Set an element of a blocks mode vector.
ssSetNumContStates Specify the number of continuous states that
an S-function has.
ssSetNumDiscStates Specify the number of discrete states that
an S-function has.
ssSetNumDWork Specify the number of data type work vectors
used by a block.
ssSetNumIWork Specify the size of an S-functions integer
(int_T) work vector.
ssSetNumModes Specify the number of operating modes that
an S-function has.
ssSetNumNonsampledZCs Specify the number of zero crossings that an
S-function detects.
ssSetNumPWork Specify the size of an S-functions pointer
(void *) work vector.
ssSetNumRWork Specify the size of an S-functions real
(real_T) work vector.
9-19
9 SimStruct Functions By Category
State and Work Vector (Continued)
Macro Description
ssSetPWorkValue Set an element of a blocks pointer work
vector.
ssSetRWorkValue Set an element of a blocks floating-point
work vector.
Miscellaneous
Macro Description
ssCallExternalModeFcn Invoke the external mode function for an
S-function.
ssGetModelName Get the name of an S-Function block or model
containing the S-function.
ssGetParentSS Get the parent of an S-function.
ssGetPath Get the path of an S-function or the model
containing the S-function.
ssGetRootSS Return the root (model) SimStruct.
ssGetUserData Access user data.
ssSetExternalModeFcn Specify the external mode function for an
S-function.
ssSetOptions Set various simulation options.
9-20
SimStruct Macros and Functions Listed by Usage
Miscellaneous (Continued)
Macro Description
ssSetPlacementGroup Specify the execution order of a sink or source
S-function.
ssSetUserData Specify user data.
Real-Time Workshop
Macro Description
ssGetDWorkRTWIdentifier Get the identifier used to declare a
DWork vector in code generated from
the associated S-function.
ssGetDWorkRTWStorageClass Get the storage class of a DWork vector
in code generated from the associated
S-function.
ssGetDWorkRTWTypeQualifier Get the C type qualifier (e.g., const)
used to declare a DWork vector in
code generated from the associated
S-function.
ssGetPlacementGroup Get the name of the placement group
of a block.
ssSetDWorkRTWIdentifier Set the identifier used to declare a
DWork vector in code generated from
the associated S-function.
ssSetDWorkRTWStorageClass Set the storage class of a DWork vector
in code generated from the associated
S-function.
ssSetDWorkRTWTypeQualifier Set the C type qualifier (e.g., const)
used to declare a DWork vector in
code generated from the associated
S-function.
ssSetPlacementGroup Specify the name of the placement
group of a block.
9-21
9 SimStruct Functions By Category
Real-Time Workshop (Continued)
Macro Description
ssWriteRTW2dMatParam Write a Simulink matrix parameter to
the S-functions model.rtw file.
ssWriteRTWMx2dMatParam Write a MATLAB matrix parameter to
the S-functions model.rtw file.
ssWriteRTWMxVectParam Write a MATLAB vector parameter to
the S-functions model.rtw file.
ssWriteRTWParameters Write tunable parameters to the
S-functions model.rtw file.
ssWriteRTWParamSettings Write settings for the S-functions
parameters to the model.rtw file.
ssWriteRTWScalarParam Write a scalar parameter to the
S-functions model.rtw file.
ssWriteRTWStr Write a string to the S-functions
model.rtw file.
ssWriteRTWStrParam Write a string parameter to the
S-functions model.rtw file.
ssWriteRTWStrVectParam Write a string vector parameter to the
S-functions model.rtw file.
ssWriteRTWVectParam Write a Simulink vector parameter to
the S-functions model.rtw file.
ssWriteRTWWorkVect Write the S-functions work vectors to
the model.rtw file.
9-22
10
S-Function Options
Alphabetical List
This section describes the S-function options available through
ssSetOptions. Each S-function sets its applicable options at the end of its
mdlInitializeSizes method. Use the OR operator (|) to set multiple options.
For example:
ssSetOptions(S, SS_OPTION_EXCEPTION_FREE_CODE |
SS_OPTION_DISCRETE_VALUED_OUTPUT);
SS_OPTION_ALLOW_CONSTANT_PORT_SAMPLE_TIME
Purpose Allow constant sample time for a port
Description Allows an S-function with port-based sample times to specify or inherit
constant sample times. Setting this option tells Simulink that all
input and output ports support constant sample times. See Specifying
Constant Sample Time for a Port on page 7-33 for more information.
Example See sfun_port_constant.c, the source file for the
sfcndemo_port_constant.mdl demo, for an example.
See Also SS_OPTION_DISALLOW_CONSTANT_SAMPLE_TIME
10-2
SS_OPTION_ALLOW_INPUT_SCALAR_EXPANSION
Purpose Allow scalar expansion of input ports
Description Specifies that the input to your S-function input ports can be have a
width of either 1 or the size specified by the port, usually referred to
as the block width. The S-function expands scalar inputs to the same
dimensions as the block width. See Scalar Expansion of Inputs on
page 7-21 for more information.
Example See sfun_multiport.c, the source file for the
sfcndemo_sfun_multiport.mdl demo, for an example.
10-3
SS_OPTION_ALLOW_PARTIAL_DIMENSIONS_CALL
Purpose Allow calls to mdlSetInputPortDimensionInfo and
mdlSetOutputPortDimensionInfo with partial dimension
information
Description Indicates the S-function can handle dynamically dimensioned signals.
By default, Simulink calls the mdlSetInputPortDimensionInfo
or mdlSetOutputPortDimensionInfo methods if the number of
dimensions and size of each dimension for the candidate port are
fully known. If SS_OPTION_ALLOW_PARTIAL_DIMENSIONS_CALLS is
set, Simulink may also call these methods with partial dimension
information. For example, the methods may be called when the port
width is known, but the actual 2-D dimensions are unknown. See
mdlSetDefaultPortDimensionInfo for more information.
See Also mdlSetDefaultPortDimensionInfo
10-4
SS_OPTION_ALLOW_PORT_SAMPLE_TIME_IN_TRIGSS
Purpose Allow an S-function with port-based sample times to operate in a
triggered subsystem
Description Allows an S-function that uses port-based sample times to operate in a
triggered subsystem. During sample time propagation, use the macro
ssSampleAndOffsetAreTriggered to determine if the sample and
offset times correspond to the block being in a triggered subsystem. If
the block is triggered, all port sample times must be either triggered
or constant. See Configuring Port-Based Sample Times for Use in
Triggered Subsystems on page 7-34 for more information.
Example See sfun_port_triggered.c, the source file for the
sfcndemo_port_triggered.mdl demo, for an example.
See Also ssSampleAndOffsetAreTriggered
10-5
SS_OPTION_ASYNC_RATE_TRANSITION
Purpose Create a read-write pair of blocks that ensure correct data transfer
Description Creates a read-write pair of blocks intended to guarantee correct data
transfers between a synchronously (periodic) and an asynchronously
executing subsystem or between two asynchronously executing
subsystems. Both the read S-function and write S-function should set
this option.
An asynchronously executed function-call subsystem is a function-call
subsystem driven by an S-function with the SS_OPTION_ASYNCHRONOUS
specified.
Simulink defines two classes of asynchronous rate transitions.
Read-write pairs. In this class, two blocks, using a technique such as
double buffering, ensure data integrity in a multitasking environment.
When creating the read-write pair of blocks, the S-functions for these
blocks should set the SS_OPTION_ASYNC_RATE_TRANSITION option.
Furthermore, the MaskType property of the read block, must include
the string read and the MaskType property of write block must
include the string write.
A single protected or unprotected block. To create a single Protected
Rate Transition block, create a subsystem that contains the following
and set the Tag value of the Outport block to AsyncRateTransition.
The S-function then provides the code for the protected
transition. Note, this S-function does not set the
SS_OPTION_ASYNC_RATE_TRANSITION option.
See Also SS_OPTION_ASYNCHRONOUS
10-6
SS_OPTION_ASYNCHRONOUS
Purpose Specify this S-function drives a function-call subsystem attached to
interrupt service routines
Description Specifies that the S-function is driving function-call subsystems
attached to interrupt service routines. This option applies only to
S-functions that have no input ports during code generation and 1
output port. During simulation, the S-function may have an input
port to provide a condition on which to execute. The output port must
be configured to perform function calls on every element. If any of
these requirements is not met, the SS_OPTION_ASYNCHRONOUS option
is ignored. Specifying this option
Informs Simulink that there is no implied data dependency involving
the data sources or destinations of the function-call subsystem called
by the S-function.
Causes the function-call subsystem attached to the S-function to be
colored cyan, indicating that it does not execute at a periodic rate.
Enables additional checks to verify that the model is constructed
correctly.
a Simulink validates that the appropriate asynchronous rate
transition blocks reside between the cyan function-call subsystem.
Simulink also checks that period tasks exists. You can directly
read and write from the function-call subsystem by using a
block that has no computational overhead. To ensure safe task
transitions between period and asynchronous tasks, use the
SS_OPTION_ASYNC_RATE_TRANSITION option.
b For data transfers between two asynchronously executed (cyan)
function-call subsystem, Simulink validates that the appropriate
asynchronous task transition blocks exits.
See Also SS_OPTION_ASYNC_RATE_TRANSITION
10-7
SS_OPTION_CALL_TERMINATE_ON_EXIT
Purpose Force call to mdlTerminate
Description Guarantees Simulink will call the S-functions mdlTerminate method
before destroying a block that references the S-function. Calling
mdlTerminate allows your S-function to clean up after itself, for
example, by freeing memory it allocated during a simulation. Simulink
destroys an S-function block under the following circumstances.
1 A simulation ends either normally or as a result of invoking
ssSetErrorStatus.
2 A user deletes the block.
3 Simulink eliminates the block as part of a block reduction
optimization (see Block reduction).
If this option is not set, Simulink calls your S-functions mdlTerminate
method only if the mdlStart method of at least one block in the model
containing the S-function executed without error.
See Also mdlTerminate
10-8
SS_OPTION_CAN_BE_CALLED_CONDITIONALLY
Purpose Specify this S-function can be called conditionally
Description Specifies that the S-function can be called conditionally by other
blocks. Simulink uses this option to determine if the S-Function block
can be moved into the execution context of the conditionally executed
subsystem in which the S-function resides. See Conditional Execution
Behavior in Using Simulink for more information.
10-9
SS_OPTION_DISALLOW_CONSTANT_SAMPLE_TIME
Purpose Disallow constant sample time inheritance
Description Prohibits the S-Function block that references this
S-function from inheriting a constant sample time. The
SS_OPTION_DISALLOW_CONSTANT_SAMPLE_TIME option applies only to
S-functions that use block-based sample times.
Note If the S-function declares the number of sample times as
PORT_BASED_SAMPLE_TIMES it will not inherit a constant sample time
unless it specifies the SS_OPTION_ALLOW_CONSTANT_PORT_SAMPLE_TIME
option.
If the S-function specifies this option and inherits a constant sample
time, i.e., a sample time of inf, Real-Time Workshop may not generate
code for the corresponding S-function block. Real-Time Workshop
determines how to generate code for the block based on if the block
is invariant.
A block is invariant if all of its port signals are invariant. A signal
is invariant if it has a constant value during the entire simulation.
However, a constant block sample time does not guarantee all the
blocks signals are invariant. See Inlining Invariant Signals in the
Real-Time Workshop Users Guide for more information.
If the block is not invariant, Real-Time Workshop generates code only
in the model_initialize function. If the block is invariant, Real-Time
Workshop eliminates the blocks code altogether.
Example See matlabroot/simulink/src/sfblk_manswitch.c for an example.
See Also SS_OPTION_ALLOW_CONSTANT_PORT_SAMPLE_TIME
10-10
SS_OPTION_DISCRETE_VALUED_OUTPUT
Purpose Specify this S-function has discrete valued output
Description Specifies this S-function has discrete valued outputs. With this option
set, Simulink does not assign algebraic variables to this S-function
when it appears in an algebraic loop.
10-11
SS_OPTION_EXCEPTION_FREE_CODE
Purpose Improve performance of exception-free S-functions
Description Improves performance of S-functions that do not use mexErrMsgTxt,
mxCalloc, or any other routines that can throw an exception. An
S-function is not exception free if it contains any routine that, when
called, has the potential of long-jumping out of a block of code and
into another scope. See Exception Free Code on page 7-60 for more
information.
See Also SS_OPTION_RUNTIME_EXCEPTION_FREE_CODE
10-12
SS_OPTION_FORCE_NONINLINED_FCNCALL
Purpose Specify generated code format for function-call subsystems called by
this S-function
Description Indicates that Real-Time Workshop should generate procedures for
all function-call subsystems called by this S-function, instead of
possibly inlining the subsystems code. If an S-function sets this option,
Real-Time Workshop ignores the Inline setting for the Real-Time
Workshop system code option on the subsystems Block Parameters
dialog box. See Nonvirtual Subsystem Code Generation in the
Real-Time Workshop Users Guide for more information.
10-13
SS_OPTION_NONVOLATILE
Purpose Enable Simulink to remove unnecessary S-Function blocks
Description Specifies this S-function has no side effects. Setting this option enables
Simulink to remove the S-Function block referencing this S-function
during dead branch elimination, if it is not needed.
10-14
SS_OPTION_PLACE_ASAP
Purpose Specify this S-function should be placed as soon as possible
Description Specifies that this S-function should be placed as soon as possible. This
option is typically used by devices connecting to hardware.
10-15
SS_OPTION_PORT_SAMPLE_TIMES_ASSIGNED
Purpose Specify this S-function uses port-based sample times
Description Indicates the S-function registers multiple sample times
(ssSetNumSampleTimes > 1) to specify the rate at which each input and
output port is running. The simulation engine needs this information
when checking for illegal rate transitions. If an S-function uses this
option, it cannot inherit its sample times. See Hybrid Block-Based and
Port-Based Sample Times on page 7-36 for more information.
Example See matlabroot/simulink/src/mixedm.c for an example.
10-16
SS_OPTION_REQ_INPUT_SAMPLE_TIME_MATCH
Purpose Specify sample times of input signal and port must match
Description Specifies that the input signal sample times must match the sample
time assigned to the block input port. For example:
generates an error if this option is set. Simulink does not generate an
error if the block or input port sample time is inherited.
10-17
SS_OPTION_RUNTIME_EXCEPTION_FREE_CODE
Purpose Improve performance of run-time exception-free S-functions
Description Improves performance of S-functions that do not use mexErrMsgTxt,
mxCalloc, or any other routines that can throw an exception
inside of a run-time routines. Applicable run-time routines
include mdlGetTimeOfNextVarHit, mdlOutputs, mdlUpdate, and
mdlDerivatives.
See Also SS_OPTION_EXCEPTION_FREE_CODE
10-18
SS_OPTION_SIM_VIEWING_DEVICE
Purpose Indicate S-Function block is a SimViewingDevice
Description Indicates the S-Function block referencing this S-function is a
SimViewingDevice. As long as the block meets the other requirements
for a SimViewingDevice, i.e., no states, no outputs, etc., Simulink
considers the block to be an external mode block. As an external model
block, the block appears in the external mode GUI and Simulink does
not generate code for it. During an external mode simulation, Simulink
runs the block only on the host. See Sim Viewing Devices in External
Mode on page 7-55 in Writing S-Functions for more information.
10-19
SS_OPTION_SFUNCTION_INLINED_FOR_RTW
Purpose Specify use of TLC-file during code generation
Description Indicates the S-function has an associated TLC-file and does not
contain an mdlRTW method. Setting this option has no effect if the
S-function contains an mdlRTW method. During code generation,
if SS_OPTION_SFUNCTION_INLINED_FOR_RTW is set and Real-Time
Workshop cannot locate the S-functions TLC-file, Real-Time Workshop
generates an error. If SS_OPTION_SFUNCTION_INLINED_FOR_RTW is not
set but Real-Time Workshop does locate a TLC-file for the S-function,
it uses the TLC-file.
10-20
SS_OPTION_SUPPORTS_ALIAS_DATA_TYPES
Purpose Support data type aliases
Description Specifies how the S-function handles signals whose data types are
aliases (see Simulink.Aliastype for more information about data type
aliases). If this option is set and the S-functions inputs and outputs use
data type aliases, SimStruct macros such as ssGetInputPortDataType
and ssGetOutputPortDataType return the data type IDs of those
aliases. However, if this option is not set, the SimStruct macros
return the data type IDs associated with the equivalent built-in data
types instead. For a list of built-in values for the data type ID, see
ssGetInputPortDataType.
Note If this option is not set and the S-functions inputs use data type
aliases, Simulink attempts to propagate the aliases to the S-functions
outputs. However, this process can fail, in which case Simulink
propagates the equivalent built-in data types instead. To explicitly
control the propagation of data type aliases through an S-function,
enable the SS_OPTION_SUPPORTS_ALIAS_DATA_TYPES option.
10-21
SS_OPTION_USE_TLC_WITH_ACCELERATOR
Purpose Use TLC-file when simulating in accelerated mode
Description Forces the Accelerator mode in Simulink to use the TLC inlining code
for the S-function, which speeds up execution of the S-function. If
this option is not set, the Accelerator mode uses the MEX version
of the S-function even if a TLC-file for the S-function exists. This
option should not be set for device driver blocks (A/D) or when
there is an incompatibility between running the MEX mdlStart or
mdlInitializeConditions functions together with the TLC Outputs,
Update, or Derivatives functions. Also, this option indicates that the
TLC inlining code should be used when generating a simulation target
for a reference submodel that contains this S-function.
Note The Accelerator mode in Simulink does not require the Real-Time
Workshop to run an inlined S-function. However, to ensure that the
inlined S-function can run in accelerated mode in current and future
Simulink releases, the TLC-file for the S-function must use documented
TLC functions to access the CompiledModel structure.
10-22
SS_OPTION_WORKS_WITH_CODE_REUSE
Purpose Specify this S-function supports code reuse
Description Signifies that this S-function is compatible with the subsystem code
reuse feature of Real-Time Workshop. See Writing S-Functions That
Support Code Reuse in the "Real-Time Workshop Users Guide" for
more information. If this option is not set, Real-Time Workshop will not
reuse any subsystem containing this S-Function.
10-23
SS_OPTION_WORKS_WITH_CODE_REUSE
10-24
A
Examples
Use this list to find examples in the documentation.
A Examples
S-Function Features
Passing Parameters to S-Functions on page 1-5
Multirate S-Function Blocks on page 7-37
Example Involving a Pointer Work Vector on page 7-47
S-Function Examples
S-Function Examples on page 1-20
Continuous States on page 7-63
Discrete States on page 7-70
Continuous and Discrete States on page 7-77
Variable Sample Time on page 7-84
Array Inputs and Outputs on page 7-90
Zero-Crossing Detection on page 7-102
Discontinuities in Continuous States on page 7-119
S-Function Builder
Building S-Functions Automatically on page 3-6
Library/Object/Source files on page 3-24
Enable access to SimStruct on page 3-35
Writing S-Functions in C
Example of a Basic C MEX S-Function on page 3-41
Example of Integrating Existing C Functions into Simulink Models with
the Legacy Code Tool on page 3-56
Creating C++ S-Functions
Source File Format on page 4-2
A-2
Creating Ada S-Functions
Creating Ada S-Functions
Ada S-Function Specification on page 5-4
Ada S-Function Body on page 5-5
Example of an Ada S-Function on page 5-12
Creating Fortran S-Functions
Example of a Level 1 Fortran S-Function on page 6-3
Example C MEX S-Function Calling Fortran Code on page 6-16
A-3
A Examples
A-4
Index
Index A
Ada S-functions
creating 5-4
example 5-12
GNAT Ada95 compiler 5-11
mex syntax 5-11
source file format 5-4
specification 5-4
additional parameters for M-file S-functions 2-13
array bounds
checking 7-62
B
block I/O ports 7-16
block-based sample times 7-27
specifying 7-27
Build Info pane
S-Function Builder 3-33
C
C functions
integrating into Simulink models 3-53
example 3-56
C language header file
matlabroot/simulink/include/-
simstruc.h 9-2
C MEX S-functions
advantages 3-3
converting from level 1 to level 2 3-89
creating 3-4
definition 1-2
deploying S-functions generated with 3-72
example 3-41
generating and compiling with Legacy Code
Tool 3-69
modes for compiling 3-51
S-Function Builder 3-6
Simulink interaction 3-74
C++ objects
making persistent 4-6
C++ S-functions
building 4-8
mex command 4-8
C-to-Fortran gateway S-function 6-8
callback methods 1-11
CFortran 6-13
cg_sfun.h 3-50
checking array bounds 7-62
compile option
for legacy_code function 3-69
compiler compatibility
Fortran 6-9
continuous blocks
setting sample time 7-38
Continuous Derivatives pane
S-Function Builder 3-29
continuous state S-function example (C
MEX) 7-63
Converting Level-1 M-file S-functions 2-13
creating persistent C++ objects 4-6
D
data structures
Legacy Code Tool
registering 3-60
registering multiple 3-71
data types
supported by Legacy Code Tool 3-67
using user-defined 7-24
demos
Legacy Code Tool 3-72
device drivers
integrating into Simulink models 3-53
direct feedthrough 1-14
discrete state S-function example (C MEX) 7-70
Discrete Update pane
S-Function Builder 3-31
Index-1
Index
dynamically sized inputs 1-15
E
error handling
checking array bounds 7-62
exception free code 7-59
examples
Ada S-function specification 5-4
C MEX S-function 3-41
continuous state S-function (C MEX) 7-63
discrete state S-function (C MEX) 7-70
Fortran MEX S-function 6-3
hybrid system S-function (C MEX) 7-77
integrating C functions into Simulink
models 3-56
Legacy Code Tool 3-56
legacy_code function 3-56
matrix support S-function (C MEX) 7-90
pointer work vector 7-47
sample time for continuous block 7-38
sample time for hybrid block 7-38
time-varying continuous transfer function (C
MEX) 7-119
variable-step S-function (C MEX) 7-84
zero-crossing S-function (C MEX) 7-102
exception free code 7-60
extern "C" statement 4-2
F
Fortran compilers 6-13
Fortran math library 6-11
Fortran MEX S-functions
example 6-3
template file 6-3
frame-based signals, implementing in
S-functions 7-56
function specifications
Legacy Code Tool
declaring 3-62
function-call subsystems 7-50
functions
Legacy Code Tool specifications for 3-62
H
header files 3-49
hybrid blocks
setting sample time 7-38
hybrid sample times
specifying 7-36
hybrid system S-function example (C MEX) 7-77
I
Initialization pane
S-Function Builder 3-14
InitializeConditionsFcnSpec field
in Legacy Code Tool data structure 3-62
input ports
how to create 7-16
inputs, dynamically sized 1-15
integration
of C functions into Simulink models 3-53
example 3-56
L
Legacy Code Tool
data structures
initialization 3-60
registering 3-60
registering multiple 3-71
declaring function specifications 3-62
demos 3-72
deploying S-functions generated with 3-72
generating and compiling S-functions
with 3-69
Index-2
Index
integrating C functions into Simulink models
with 3-53
example 3-56
limitations 3-73
overview 3-53
supported data types 3-67
legacy_code function
example 3-56
generating file for code generation
support 3-71
level 1 C MEX S-functions
converting to level 2 3-89
Libraries pane
S-Function Builder 3-23
limitations
Legacy Code Tool 3-73
lookup tables
integrating into Simulink models 3-53
M
M-file S-functions
arguments 2-10
creating 2-9
defining characteristics 2-12
definition 2-9
passing additional parameters 2-13
routines 2-9
masked multiport S-functions 7-23
masked S-function blocks
for calling S-function generated with Legacy
Code Tool 3-70
matlabroot/simulink/include/simstruc.h C
language header file 9-2
matlabroot/simulink/src/csfunc.c example
file 7-64
matlabroot/simulink/src/dsfunc.c example
file 7-71
matlabroot/simulink/src/mixedm.c example
file 7-77
matlabroot/simulink/src/sfun_counter_-
cpp.cpp
ensuring Simulink compatibility of C++
S-functions 4-2
matlabroot/simulink/src/sfun_matadd.c
example file 7-91
matlabroot/simulink/src/sfun_timestwo_for.F
Fortran example file 6-3
matlabroot/simulink/src/sfun_zc_sat.c
example file 7-102
matlabroot/simulink/src/stvctf.c example
file 7-119
matlabroot/simulink/src/vsfunc.c example
file 7-84
matrix support S-function example (C MEX) 7-90
matrix.h 3-49
mdlCheckParameters 8-2
mdlDerivatives 8-5
mdlGetTimeOfNextVarHit 8-9
mdlInitializeConditions 8-11
mdlInitializeSampleTimes 8-14
mdlInitializeSizes 8-19
and sizes structure 1-15
calling sizes 2-12
mdlOutputs 8-25
mdlProcessParameters 8-27
mdlRTW 8-36
mdlSetDefaultPortComplexSignals 8-38
mdlSetDefaultPortDataTypes 8-39
mdlSetDefaultPortDimensionInfo 8-41
mdlSetInputPortComplexSignal 8-43
mdlSetInputPortDataType 8-45
mdlSetInputPortDimensionInfo 8-47
mdlSetInputPortFrameData 8-49
mdlSetInputPortSampleTime 8-51
mdlSetInputPortWidth 8-54
mdlSetOutputPortComplexSignal 8-55
mdlSetOutputPortDataType 8-57
mdlSetOutputPortDimensionInfo 8-59
mdlSetOutputPortSampleTime 8-61
Index-3
Index
mdlSetOutputPortWidth 8-63
mdlSetWorkWidths 8-64
mdlSimStatusChange 8-66
mdlStart 8-68
mdlTerminate 8-69
mdlUpdate 8-71
mdlZeroCrossings 8-74
memory allocation 7-49
memory and work vectors 7-42
mex command
building Ada S-functions 5-11
building C MEX S-functions 3-47
building C++ S-functions 4-8
MEX S-functions
deploying S-functions generated with 3-72
generating and compiling with Legacy Code
Tool 3-69
mex.h 3-49
multirate S-Function blocks 7-37
synchronizing 7-39
O
obsolete macros 3-92
output ports
how to create 7-20
OutputFcnSpec field
in Legacy Code Tool data structure 3-62
Outputs pane
S-Function Builder 3-25
P
parameters
M-file S-functions 2-13
passing to S-functions 1-5
run-time parameters 7-7
tunable parameters 7-4
penddemo demo 1-6
persistence
C++ objects 4-6
port-based sample times 7-31
constant 7-33
inherited 7-32
specifying 7-31
triggered 7-34
R
reentrancy 7-42
run-time parameter names, uniqueness of 7-8
run-time parameters 7-7
run-time routines 7-61
S
S-function blocks
masked
for S-functions generated with Legacy
Code Tool 3-70
S-Function blocks
multirate 7-37
S-functions parameters field 7-2
synchronizing multirate 7-39
S-Function Builder
Build Info pane 3-33
Continuous Derivatives pane 3-29
customizing 3-11
Discrete Update pane 3-31
for C MEX S-functions 3-6
Initialization pane 3-14
Libraries pane 3-23
Outputs pane 3-25
setting the include path 3-24
S-function data types 3-51
S-function routines
M-file 2-9
S_FUNCTION_LEVEL 2, #define 3-48
S_FUNCTION_NAME, #define 3-48
S-functions 2-9 3-3 4-1 5-2 6-3
Index-4
Index
building C++ 4-8
C MEX 1-2
creating Ada 5-4
creating C MEX 3-4
creating Fortran 6-3
creating level 2 with Fortran 6-8
creating persistent C++ objects 4-6
creating run-time parameters 7-8
definition 1-2
deploying 3-72
direct feedthrough 1-14
exception free code 7-60
generating and compiling with Legacy Code
Tool 3-69
level 1 and level 2 6-2
masked multiport 7-23
purpose 1-6
routines 1-9
run-time parameters 7-7
run-time routines 7-61
using in models 1-3
when to use 1-6
writing in C++ 4-2
See also Ada S-functions; C MEX S-functions;
C++ S-functions; Fortran MEX S-functions;
M-file S-functions
S-functions parameters field
S-Function block 7-2
sample times
block-based 7-27
continuous block example 7-38
function behavior 7-26
hybrid block example 7-38
port-based 7-31
specifying block-based 7-27
specifying hybrid 7-36
specifying port-based 7-31
scalar expansion of inputs 7-21
sfcn_cmex_generate option
for legacy_code function 3-69
sfuntmpl.c template 3-48
sfuntmpl_fortran.F template 6-3
sfuntmpl.m template
M-file S-function 2-9
simsizes function
M-file S-function 2-12
SimStruct 3-51
SimStruct macros 9-3
simulation loop 1-8
simulation stages 1-8
simulink.c 3-50
sizes structure
fields
M-file S-function 2-12
returned in mdlInitializeSizes 1-15
slblock_generate option
for legacy_code function 3-70
SS_OPTION_ALLOW_CONSTANT_PORT_SAMPLE_TIME 10-2
SS_OPTION_ALLOW_INPUT_SCALAR_EXPANSION 10-3
SS_OPTION_ALLOW_PARTIAL_DIMENSIONS_CALL 10-4
SS_OPTION_ALLOW_PORT_SAMPLE_TIME_IN_TRIGSS 10-5
SS_OPTION_ASYNC_RATE_TRANSITION 10-6
SS_OPTION_ASYNCHRONOUS 10-7
SS_OPTION_CALL_TERMINATE_ON_EXIT 10-8
SS_OPTION_CAN_BE_CALLED_CONDITIONALLY 10-9
SS_OPTION_DISALLOW_CONSTANT_SAMPLE_TIME 10-10
SS_OPTION_DISCRETE_VALUED_OUTPUT 10-11
SS_OPTION_EXCEPTION_FREE_CODE 10-12
SS_OPTION_FORCE_NONINLINED_FCNCALL 10-13
SS_OPTION_NONVOLATILE 10-14
SS_OPTION_PLACE_ASAP 10-15
SS_OPTION_PORT_SAMPLE_TIMES_ASSIGNED 10-16
SS_OPTION_REQ_INPUT_SAMPLE_TIME_MATCH 10-17
SS_OPTION_RUNTIME_EXCEPTION_FREE_CODE 10-18
SS_OPTION_SFUNCTION_INLINED_FOR_RTW 10-20
SS_OPTION_SIM_VIEWING_DEVICE 10-19
SS_OPTION_SUPPORTS_ALIAS_DATA_TYPES 10-21
SS_OPTION_USE_TLC_WITH_ACCELERATOR 10-22
SS_OPTION_WORKS_WITH_CODE_REUSE 10-23
ssGetModeVectorValue 9-17
Index-5
Index
StartFcnSpec field
in Legacy Code Tool data structure 3-62
synchronizing multirate S-Function blocks 7-39
T
templates
M-file S-function 2-9
TerminateFcnSpec field
in Legacy Code Tool data structure 3-62
time-varying continuous transfer function
example (C MEX) 7-119
TLC block file
generating for C MEX S-functions 3-71
tmwtypes.h 3-49
tunable parameters 7-4
V
variable-step S-function example (C MEX) 7-84
W
work vectors 7-42
writing S-functions in Ada 5-4
writing S-functions in C++ 4-2
writing S-functions in MATLAB 2-9
Z
zero-crossing S-function example (C MEX) 7-102
Index-6
You might also like
- Physics Informed Neural Network Theory and ApplicationsNo ratings yetPhysics Informed Neural Network Theory and Applications44 pages
- Intensity Transformation and Spatial Filtering - Gonzales Chapter 3.1-3.3No ratings yetIntensity Transformation and Spatial Filtering - Gonzales Chapter 3.1-3.325 pages
- Classifying Images Using Keras MobileNet and TensorFlow - Js in Google Chrome - Gogul IlangoNo ratings yetClassifying Images Using Keras MobileNet and TensorFlow - Js in Google Chrome - Gogul Ilango15 pages
- (Ebook) Introduction To Numerical Analysis - J.stoer, R.bulirsch100% (1)(Ebook) Introduction To Numerical Analysis - J.stoer, R.bulirsch672 pages
- Light Microscopy: RW Lovitt and CJ Wright, University of Wales, Swansea, UKNo ratings yetLight Microscopy: RW Lovitt and CJ Wright, University of Wales, Swansea, UK9 pages
- Huawei Digital Urban Rail Solutions (High-Level Technology)No ratings yetHuawei Digital Urban Rail Solutions (High-Level Technology)25 pages
- PDF Machine Learning and Optimization for Engineering Design 1st Edition Apoorva S. Shastri download100% (2)PDF Machine Learning and Optimization for Engineering Design 1st Edition Apoorva S. Shastri download40 pages
- Mathworks Matlab7 - Toolbox - System Identification Toolbox User's Guide100% (1)Mathworks Matlab7 - Toolbox - System Identification Toolbox User's Guide566 pages
- Image Acquisition: Illuminating A Scene and AbsorbingNo ratings yetImage Acquisition: Illuminating A Scene and Absorbing24 pages
- Real Time Video Analytics For Object Detection and Face Identification Using Deep Learning IJERTV8IS050298No ratings yetReal Time Video Analytics For Object Detection and Face Identification Using Deep Learning IJERTV8IS0502986 pages
- Introduction and Installation Instructions: Matlab & Simulink Student Version100% (1)Introduction and Installation Instructions: Matlab & Simulink Student Version56 pages
- Software Engineering and Project ManagementNo ratings yetSoftware Engineering and Project Management23 pages
- List of Datasets For Machine-Learning Research100% (1)List of Datasets For Machine-Learning Research61 pages
- Ultimate Robotics Programming with ROS 2 and Python: Design, Develop, and Implement Intelligent Robotics Applications with Advanced Navigation, Simulation, and Computer Vision for Mobile and Industrial Robots (English Edition)From EverandUltimate Robotics Programming with ROS 2 and Python: Design, Develop, and Implement Intelligent Robotics Applications with Advanced Navigation, Simulation, and Computer Vision for Mobile and Industrial Robots (English Edition)No ratings yet
- Kelley IterativeMethodsforLinearandNonlinearEqs100% (1)Kelley IterativeMethodsforLinearandNonlinearEqs172 pages
- Practical Guide To SciPy For Data Science 1690206596No ratings yetPractical Guide To SciPy For Data Science 169020659639 pages
- Genetic Algorithms: and Other Approaches For Similar Applications100% (1)Genetic Algorithms: and Other Approaches For Similar Applications83 pages
- Fuzzy Logic: UIET (Computer Science Deptt)100% (1)Fuzzy Logic: UIET (Computer Science Deptt)56 pages
- Instant Access to Modern Statistics: A Computer-Based Approach with Python (Statistics for Industry, Technology, and Engineering) Ron S. Kenett ebook Full Chapters100% (2)Instant Access to Modern Statistics: A Computer-Based Approach with Python (Statistics for Industry, Technology, and Engineering) Ron S. Kenett ebook Full Chapters40 pages
- Advanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesFrom EverandAdvanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesNo ratings yet
- Hands-on ML Projects with OpenCV: Master computer vision and Machine Learning using OpenCV and Python (English Edition)From EverandHands-on ML Projects with OpenCV: Master computer vision and Machine Learning using OpenCV and Python (English Edition)No ratings yet
- Model-Based and System-Based Design: Writing S-Functions100% (1)Model-Based and System-Based Design: Writing S-Functions556 pages
- Wolfram Mathematica 9.0.1 Cracked Download Key Download0% (2)Wolfram Mathematica 9.0.1 Cracked Download Key Download4 pages
- Fundamentals of Linear Systems and Signal NprocessingNo ratings yetFundamentals of Linear Systems and Signal Nprocessing394 pages
- Ec8352-Signals and Systems-1296919945-Ec8352No ratings yetEc8352-Signals and Systems-1296919945-Ec835258 pages
- Digital Control and State Variable Methods Conventional and Intelligent Control Systems 4nbsped 9780071333276 0071333274 CompressNo ratings yetDigital Control and State Variable Methods Conventional and Intelligent Control Systems 4nbsped 9780071333276 0071333274 Compress924 pages
- Unit 1: Introduction To Communication Systems Historical Notes-Communication SystemsNo ratings yetUnit 1: Introduction To Communication Systems Historical Notes-Communication Systems55 pages
- Linear Dynamical Systems 2022 LinDynSysNo ratings yetLinear Dynamical Systems 2022 LinDynSys45 pages
- A Study On Lateral Speed Estimation MethodsNo ratings yetA Study On Lateral Speed Estimation Methods20 pages
- Unit 3 Discrete Time Fourier Transform Questions and Answers - Sanfoundry PDFNo ratings yetUnit 3 Discrete Time Fourier Transform Questions and Answers - Sanfoundry PDF3 pages
- Connection Between Continuous and DiscreteNo ratings yetConnection Between Continuous and Discrete8 pages
- State Council For Technical Education and Vocational Training, OdishaNo ratings yetState Council For Technical Education and Vocational Training, Odisha29 pages
- Types of Sensor Passive and Active SensorsNo ratings yetTypes of Sensor Passive and Active Sensors5 pages
- Digital Electronic Circuits Prof. Goutam Saha Department of E and EC Engineering Indian Institute of Technology, Kharagpur Lecture - 01No ratings yetDigital Electronic Circuits Prof. Goutam Saha Department of E and EC Engineering Indian Institute of Technology, Kharagpur Lecture - 0115 pages

































































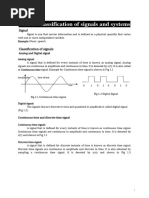
























- Physics Informed Neural Network Theory and ApplicationsPhysics Informed Neural Network Theory and Applications
- Intensity Transformation and Spatial Filtering - Gonzales Chapter 3.1-3.3Intensity Transformation and Spatial Filtering - Gonzales Chapter 3.1-3.3
- Classifying Images Using Keras MobileNet and TensorFlow - Js in Google Chrome - Gogul IlangoClassifying Images Using Keras MobileNet and TensorFlow - Js in Google Chrome - Gogul Ilango
- (Ebook) Introduction To Numerical Analysis - J.stoer, R.bulirsch(Ebook) Introduction To Numerical Analysis - J.stoer, R.bulirsch
- Light Microscopy: RW Lovitt and CJ Wright, University of Wales, Swansea, UKLight Microscopy: RW Lovitt and CJ Wright, University of Wales, Swansea, UK
- Huawei Digital Urban Rail Solutions (High-Level Technology)Huawei Digital Urban Rail Solutions (High-Level Technology)
- PDF Machine Learning and Optimization for Engineering Design 1st Edition Apoorva S. Shastri downloadPDF Machine Learning and Optimization for Engineering Design 1st Edition Apoorva S. Shastri download
- Mathworks Matlab7 - Toolbox - System Identification Toolbox User's GuideMathworks Matlab7 - Toolbox - System Identification Toolbox User's Guide
- Image Acquisition: Illuminating A Scene and AbsorbingImage Acquisition: Illuminating A Scene and Absorbing
- Real Time Video Analytics For Object Detection and Face Identification Using Deep Learning IJERTV8IS050298Real Time Video Analytics For Object Detection and Face Identification Using Deep Learning IJERTV8IS050298
- Introduction and Installation Instructions: Matlab & Simulink Student VersionIntroduction and Installation Instructions: Matlab & Simulink Student Version
- Ultimate Robotics Programming with ROS 2 and Python: Design, Develop, and Implement Intelligent Robotics Applications with Advanced Navigation, Simulation, and Computer Vision for Mobile and Industrial Robots (English Edition)From EverandUltimate Robotics Programming with ROS 2 and Python: Design, Develop, and Implement Intelligent Robotics Applications with Advanced Navigation, Simulation, and Computer Vision for Mobile and Industrial Robots (English Edition)
- Practical Guide To SciPy For Data Science 1690206596Practical Guide To SciPy For Data Science 1690206596
- Genetic Algorithms: and Other Approaches For Similar ApplicationsGenetic Algorithms: and Other Approaches For Similar Applications
- Instant Access to Modern Statistics: A Computer-Based Approach with Python (Statistics for Industry, Technology, and Engineering) Ron S. Kenett ebook Full ChaptersInstant Access to Modern Statistics: A Computer-Based Approach with Python (Statistics for Industry, Technology, and Engineering) Ron S. Kenett ebook Full Chapters
- Advanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesFrom EverandAdvanced Dynamic-System Simulation: Model Replication and Monte Carlo Studies
- Developing Intelligent Agent Systems: A Practical GuideFrom EverandDeveloping Intelligent Agent Systems: A Practical Guide
- Hands-on ML Projects with OpenCV: Master computer vision and Machine Learning using OpenCV and Python (English Edition)From EverandHands-on ML Projects with OpenCV: Master computer vision and Machine Learning using OpenCV and Python (English Edition)
- Model-Based and System-Based Design: Writing S-FunctionsModel-Based and System-Based Design: Writing S-Functions
- Wolfram Mathematica 9.0.1 Cracked Download Key DownloadWolfram Mathematica 9.0.1 Cracked Download Key Download
- Fundamentals of Linear Systems and Signal NprocessingFundamentals of Linear Systems and Signal Nprocessing
- Digital Control and State Variable Methods Conventional and Intelligent Control Systems 4nbsped 9780071333276 0071333274 CompressDigital Control and State Variable Methods Conventional and Intelligent Control Systems 4nbsped 9780071333276 0071333274 Compress
- Unit 1: Introduction To Communication Systems Historical Notes-Communication SystemsUnit 1: Introduction To Communication Systems Historical Notes-Communication Systems
- Unit 3 Discrete Time Fourier Transform Questions and Answers - Sanfoundry PDFUnit 3 Discrete Time Fourier Transform Questions and Answers - Sanfoundry PDF
- State Council For Technical Education and Vocational Training, OdishaState Council For Technical Education and Vocational Training, Odisha
- Digital Electronic Circuits Prof. Goutam Saha Department of E and EC Engineering Indian Institute of Technology, Kharagpur Lecture - 01Digital Electronic Circuits Prof. Goutam Saha Department of E and EC Engineering Indian Institute of Technology, Kharagpur Lecture - 01