Gps SkyTraq - Man2
Gps SkyTraq - Man2
Download as pdf or txt
You might also like
- Rastreador New Tracker: NT20/NT40/NT26Document40 pagesRastreador New Tracker: NT20/NT40/NT26rafael reynoudNo ratings yet
- Manual Survey Pro For RangerDocument337 pagesManual Survey Pro For RangerIni ChitozNo ratings yet
- NDS3306I 6 in 1 ISDB-T Modulator User Manual 2018.11.26Document24 pagesNDS3306I 6 in 1 ISDB-T Modulator User Manual 2018.11.26jhunniorNo ratings yet
- BG7TBL LCD-GPSDO English User Manual V1.1-DDocument11 pagesBG7TBL LCD-GPSDO English User Manual V1.1-DLuis AriasNo ratings yet
- SkyNav SKM55 DSDocument11 pagesSkyNav SKM55 DSAnugrah Achmad0% (1)
- From GSM to LTE-Advanced Pro and 5G: An Introduction to Mobile Networks and Mobile BroadbandFrom EverandFrom GSM to LTE-Advanced Pro and 5G: An Introduction to Mobile Networks and Mobile BroadbandNo ratings yet
- W-12 Water Sources Inventory For Northern SomaliaDocument77 pagesW-12 Water Sources Inventory For Northern SomaliaKhadar Hayaan Freelancer100% (1)
- Manual PDF 2111254Document42 pagesManual PDF 2111254alfathayunNo ratings yet
- Bus Tracking SystemDocument19 pagesBus Tracking SystemErole Technologies Pvt ltd Homemade Engineer100% (1)
- ( ( ( (ROM ROM ROM ROM Based) Based) Based) Based) : Data Data Data Data Sheet Sheet Sheet SheetDocument17 pages( ( ( (ROM ROM ROM ROM Based) Based) Based) Based) : Data Data Data Data Sheet Sheet Sheet Sheetwizardgrt1No ratings yet
- Pcan-Gps: User ManualDocument38 pagesPcan-Gps: User ManualKrum KashavarovNo ratings yet
- LD 24 Radar Manual 0927Document15 pagesLD 24 Radar Manual 0927Majuna KonggrapuntNo ratings yet
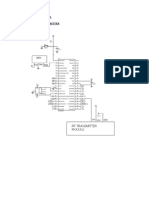
- Circuit Diagram Wireless TransmitterDocument17 pagesCircuit Diagram Wireless Transmitterumaiya1990100% (2)
- IDR CwIDU LC Presentation Edition2Document142 pagesIDR CwIDU LC Presentation Edition2nion83No ratings yet
- NDS3332 IP QAM Modulator User Manual 201610Document24 pagesNDS3332 IP QAM Modulator User Manual 201610PT. GARUDA SUPER LINKNo ratings yet
- Project Title: - Tracking and Border Alert System For Fishermen Using GPSDocument22 pagesProject Title: - Tracking and Border Alert System For Fishermen Using GPSArchit MeenaNo ratings yet
- ET-662 User Manual V2.2Document21 pagesET-662 User Manual V2.2Pirulito T PongoNo ratings yet
- Intelligent System For Toxic Gas Detection Using GSMDocument36 pagesIntelligent System For Toxic Gas Detection Using GSMstalin882657% (7)
- GPSManualV1 1Document11 pagesGPSManualV1 1Emerson Gutiérrez CarrilloNo ratings yet
- Me 1000RW PDFDocument25 pagesMe 1000RW PDFCarlaine Martins VieiraNo ratings yet
- RN-171 802.11 B/G Wireless LANDocument16 pagesRN-171 802.11 B/G Wireless LANAnonymous 60esBJZIjNo ratings yet
- Furuno: 1 Panel Computer UnitDocument3 pagesFuruno: 1 Panel Computer UnitAnonymous QRJuPTg2No ratings yet
- RTL 8186Document50 pagesRTL 8186Maria Alejandra DalcolmoNo ratings yet
- S86T GPS Receiver User GuideDocument54 pagesS86T GPS Receiver User GuideGalih Yudha Wahyu Saputra100% (1)
- GT320RDocument15 pagesGT320REveraldo BohrerNo ratings yet
- DX3316 IP QAM Modulator User Manual 201605Document22 pagesDX3316 IP QAM Modulator User Manual 201605vmereciNo ratings yet
- KL 600Document5 pagesKL 600edulabs0% (1)
- Skynav Skm53 Series Ultra High Sensitivity and Low Power The Smart Antenna Gps ModuleDocument8 pagesSkynav Skm53 Series Ultra High Sensitivity and Low Power The Smart Antenna Gps ModuleOVALLEPANo ratings yet
- 8-Bit Single Chip Microcontroller LC87F67C8ADocument27 pages8-Bit Single Chip Microcontroller LC87F67C8AAlbert GTNo ratings yet
- 10-Inch Daylight Radar: ModelDocument2 pages10-Inch Daylight Radar: ModelAnonymous LWwvb0PzIwNo ratings yet
- 23151-gps GBT 709Document15 pages23151-gps GBT 709Jose VogelNo ratings yet
- Skytraq-Venus634FLPx DS v051Document18 pagesSkytraq-Venus634FLPx DS v051lahyouhNo ratings yet
- MSM628 16 CH Mux-Scrambling QAM Modulator User ManualDocument23 pagesMSM628 16 CH Mux-Scrambling QAM Modulator User ManualJose Manuel ReyesNo ratings yet
- vLocPro2 RX DataSheet VXMT Eng V1.4 (Publish) 20120412Document5 pagesvLocPro2 RX DataSheet VXMT Eng V1.4 (Publish) 20120412GRANRICKYNo ratings yet
- 03-System OverviewDocument34 pages03-System OverviewleolamiaNo ratings yet
- Frsky D8R-II ManualDocument6 pagesFrsky D8R-II Manualjuansallas100% (1)
- 23150-gps 9540Document14 pages23150-gps 9540Jose VogelNo ratings yet
- F 1072 5364 1Document19 pagesF 1072 5364 1Raul VargasNo ratings yet
- cc1120 Radio Transciever DatasheetDocument37 pagescc1120 Radio Transciever Datasheeth1238709mNo ratings yet
- Mediatek 3329Document19 pagesMediatek 3329Dũng HoàngNo ratings yet
- IP Controller FinalDocumentationDocument4 pagesIP Controller FinalDocumentationWesley NealNo ratings yet
- Microwave Nec Pasolink Neo by Akash RayDocument48 pagesMicrowave Nec Pasolink Neo by Akash RayPepe LuchoNo ratings yet
- Microwave - Nec Pasolink Neo by Akash RayDocument48 pagesMicrowave - Nec Pasolink Neo by Akash RayAkash Ray100% (4)
- ATS692 H DatasheetDocument12 pagesATS692 H Datasheetshivani_mehrotra_8No ratings yet
- HOT AXLE SpecificationDocument4 pagesHOT AXLE SpecificationAnonymous az2UUTNo ratings yet
- 192 KHZ Digital Audio Interface Receiver: FeaturesDocument60 pages192 KHZ Digital Audio Interface Receiver: FeaturesmercyjohnNo ratings yet
- FAR3000 Chart Radar BrochureDocument8 pagesFAR3000 Chart Radar BrochureMiguel PerezNo ratings yet
- Agribot Project PresentationDocument21 pagesAgribot Project Presentationumaiya1990100% (1)
- INT2108-I User ManualDocument39 pagesINT2108-I User ManualDamian VillarNo ratings yet
- NAT_RQT_400x_enDocument2 pagesNAT_RQT_400x_enruturaj v delekarNo ratings yet
- Vehicle Speed Control Using R.F. Technology: 1 Project Report OnDocument57 pagesVehicle Speed Control Using R.F. Technology: 1 Project Report OnAvinash RanjanNo ratings yet
- BLN 95 9041Document5 pagesBLN 95 9041marsh2002No ratings yet
- Windows 8 NoticeDocument48 pagesWindows 8 NoticeSantosh Kumar GuptNo ratings yet
- Spy RobotDocument74 pagesSpy Robotjanakiram473No ratings yet
- ID-LA-IsO Series Low Cost RFID Reader Module Used Animal Tagging LF ISO11785Document10 pagesID-LA-IsO Series Low Cost RFID Reader Module Used Animal Tagging LF ISO11785AbleIDLtdNo ratings yet
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- Digital Mobile Communications and the TETRA SystemFrom EverandDigital Mobile Communications and the TETRA SystemRating: 5 out of 5 stars5/5 (1)
- LevelingDocument6 pagesLevelingKudosnetworkNo ratings yet
- 5 The Role of Motion Analysis in Elite Soccer Contemporary Performance Measurement Techniques and Work-Rate DataDocument56 pages5 The Role of Motion Analysis in Elite Soccer Contemporary Performance Measurement Techniques and Work-Rate DataДенис ГолубевNo ratings yet
- 2000 Thesis Low Cost High Integrity Aided Navigation System PDFDocument212 pages2000 Thesis Low Cost High Integrity Aided Navigation System PDFRăzvan PopaNo ratings yet
- Collins Tamafor Report PDFDocument50 pagesCollins Tamafor Report PDFNangweri clintonNo ratings yet
- Warning System For DriverDocument11 pagesWarning System For DrivervinodkharNo ratings yet
- Arduino Based Tracking System Using GPS and GSM: Thin Thin Htwe, Dr. Kyaw Kyaw HlaingDocument5 pagesArduino Based Tracking System Using GPS and GSM: Thin Thin Htwe, Dr. Kyaw Kyaw HlaingRazil AhamedNo ratings yet
- MN000315E NMEA Ref ManualDocument19 pagesMN000315E NMEA Ref ManualHendri PetrickNo ratings yet
- Packtalk BoldDocument31 pagesPacktalk BoldArie WowoNo ratings yet
- Slope Stability Prism Monitoring: A Guide For Practising Mine SurveyorsDocument136 pagesSlope Stability Prism Monitoring: A Guide For Practising Mine SurveyorsGeorgeNo ratings yet
- Simulating Quadrotor UAVs in Outdoor ScenariosDocument7 pagesSimulating Quadrotor UAVs in Outdoor ScenariosRodolfo Castro E SilvaNo ratings yet
- Lecture 13 GPS Assignment: Project: GPS and GRDocument2 pagesLecture 13 GPS Assignment: Project: GPS and GRVikas RajpootNo ratings yet
- JJRC X7 Manual InglesDocument8 pagesJJRC X7 Manual InglesManuel100% (1)
- XASE18-Navigation SystemDocument105 pagesXASE18-Navigation SystemVigha Omnica Iyer100% (2)
- A330 b2 Ata46 Infomation Systems Basic - UnlockedDocument78 pagesA330 b2 Ata46 Infomation Systems Basic - UnlockedAaron Harvey0% (2)
- EM 1110-2-1009 - Structural Deformation Surveying 1Document292 pagesEM 1110-2-1009 - Structural Deformation Surveying 1PDHLibrary50% (2)
- GPS Tracker Communication ProtocolDocument39 pagesGPS Tracker Communication ProtocolMuhammed EmamNo ratings yet
- Factory and Equipment Clock Synchronization and Time-StampingDocument44 pagesFactory and Equipment Clock Synchronization and Time-Stampingraghavendran raghuNo ratings yet
- DGPS Trimble BD950Document2 pagesDGPS Trimble BD950aitopesNo ratings yet
- Q1 - W1-2 - Distance and Midpoint FormulaDocument5 pagesQ1 - W1-2 - Distance and Midpoint FormulaF-CABAGUING, HANNAH M.No ratings yet
- 12abmb2 Group4 Chapter1Document20 pages12abmb2 Group4 Chapter1Kenneth Del RosarioNo ratings yet
- Radio NavvDocument18 pagesRadio NavvSwapnil KarkiNo ratings yet
- GT06&TK100 New User Manual8.13Document26 pagesGT06&TK100 New User Manual8.13Ivan Villarreal LopezNo ratings yet
- 1 - Protocol123456 12 OutDocument25 pages1 - Protocol123456 12 OutOvelandOvelandsNo ratings yet
- State of The Satellite Industry Report May12 - SIADocument26 pagesState of The Satellite Industry Report May12 - SIAPho Duc NamNo ratings yet
- Unit 5 Modern Surveying EquipmentDocument20 pagesUnit 5 Modern Surveying Equipment121915501016 gitamNo ratings yet
- GNSS Processing Report: Baseline AQ05 - PCG-1Document8 pagesGNSS Processing Report: Baseline AQ05 - PCG-1Ernest HemilNo ratings yet
- IStartek GPRS Protocol - V2.0Document17 pagesIStartek GPRS Protocol - V2.0luisbeltNo ratings yet