ATS692 H Datasheet
ATS692 H Datasheet
Download as pdf or txt
You might also like
- Ramp Power 232 - Operator's Manual - E Option Control Panels - Part #OA7605 - Jun 2003 - GENERAC PDFDocument80 pagesRamp Power 232 - Operator's Manual - E Option Control Panels - Part #OA7605 - Jun 2003 - GENERAC PDFpevare100% (3)
- Question ATA 24Document2 pagesQuestion ATA 24Adil KhNo ratings yet
- 2017 Plastics and Polymer Composites in Light VehiclesDocument24 pages2017 Plastics and Polymer Composites in Light VehiclesVishal IngleNo ratings yet
- Design and Implementation of Variable Power SupplyDocument8 pagesDesign and Implementation of Variable Power SupplySoyebAhmed67% (3)
- SMR SpecsDocument26 pagesSMR SpecsShantanu JhaNo ratings yet
- A3423 Datasheet PDFDocument10 pagesA3423 Datasheet PDFRuannytha RibeiroNo ratings yet
- ACS712 DatasheetDocument15 pagesACS712 DatasheetHernan PorriniNo ratings yet
- Isppac 10: Features Functional Block DiagramDocument23 pagesIsppac 10: Features Functional Block DiagramFaiber CalderonNo ratings yet
- ACS713-Datasheet - Current Sensor ICDocument14 pagesACS713-Datasheet - Current Sensor ICphase90No ratings yet
- 6012C Tech SpecDocument9 pages6012C Tech SpecradamNo ratings yet
- ACS712 DatasheetDocument15 pagesACS712 DatasheetejmelchiorsNo ratings yet
- F 1072 5364 1Document19 pagesF 1072 5364 1Raul VargasNo ratings yet
- A 3423 Hall Effect EncordorDocument9 pagesA 3423 Hall Effect Encordortabassam7801No ratings yet
- AS3930 Wakeup Reciever DatasheetDocument43 pagesAS3930 Wakeup Reciever DatasheetVojtěch HauserNo ratings yet
- LMH6550 Differential, High Speed Op Amp: R R V V ADocument25 pagesLMH6550 Differential, High Speed Op Amp: R R V V AJavier Felipe AlvaradoNo ratings yet
- CD4047BC Low Power Monostable/Astable Multivibrator: General DescriptionDocument10 pagesCD4047BC Low Power Monostable/Astable Multivibrator: General DescriptionWillianNo ratings yet
- Ads 7870Document43 pagesAds 7870Moorthy VenkatachalamNo ratings yet
- 10-Bit Digital-To-Analog Converters: Features DescriptionDocument22 pages10-Bit Digital-To-Analog Converters: Features Descriptionwolvering2009No ratings yet
- LMH6703Document13 pagesLMH6703Daniel SuarezNo ratings yet
- Absolute EncoderDocument7 pagesAbsolute EncoderMark TorresNo ratings yet
- SonarDocument14 pagesSonarUros SmiljanicNo ratings yet
- Stereo, Single-Supply 18-Bit Integrated DAC AD1859: SD Modulator With Triangular PDF DitherDocument16 pagesStereo, Single-Supply 18-Bit Integrated DAC AD1859: SD Modulator With Triangular PDF DitherSubir MaityNo ratings yet
- Ir 2153Document8 pagesIr 2153oasdopdasNo ratings yet
- ACS714Document15 pagesACS714connect2nsNo ratings yet
- Datasheet AEAT-6600Document11 pagesDatasheet AEAT-6600ArminNo ratings yet
- Uc3842b 3843BDocument10 pagesUc3842b 3843Bbob75No ratings yet
- RTXM192-xxx DDMDocument16 pagesRTXM192-xxx DDMmatsmats1No ratings yet
- DR 0014Document2 pagesDR 0014maxplanck67No ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
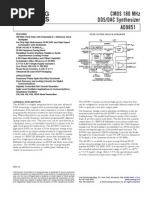
- Ad9851 Cmos 180 MHZ Dds/Dac SynthesizerDocument24 pagesAd9851 Cmos 180 MHZ Dds/Dac SynthesizerVijay VigneshNo ratings yet
- 1.25Gbps SFP Bi-Directional Transceiver, 20km Reach: GlcbxuDocument9 pages1.25Gbps SFP Bi-Directional Transceiver, 20km Reach: Glcbxutv_romeoNo ratings yet
- RTXM191-404 (Tellabs)Document14 pagesRTXM191-404 (Tellabs)markingtv100% (2)
- 9-0-9 Step Down TransformerDocument20 pages9-0-9 Step Down TransformerSarthak JoshiNo ratings yet
- Adc 0804 PDFDocument18 pagesAdc 0804 PDFCinthya VillenaNo ratings yet
- Airpax PDFDocument46 pagesAirpax PDFvjNo ratings yet
- ST251Document18 pagesST251kingarpit24No ratings yet
- Adc 0804Document41 pagesAdc 0804AndySilvandNo ratings yet
- 2.488Gbps SFP Optical Transceiver, 2km Reach: DS-SFP-FC-2G-LWDocument8 pages2.488Gbps SFP Optical Transceiver, 2km Reach: DS-SFP-FC-2G-LWtv_romeoNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- DM74123 Dual Retriggerable One-Shot With Clear and Complementary OutputsDocument5 pagesDM74123 Dual Retriggerable One-Shot With Clear and Complementary OutputsDiego HenriqueNo ratings yet
- 2 X 6W Car Radio Amplifier Plus Solid State Switch: Protections DescriptionDocument8 pages2 X 6W Car Radio Amplifier Plus Solid State Switch: Protections DescriptionMiloud ChouguiNo ratings yet
- EWD Speed Monitor DeviceDocument11 pagesEWD Speed Monitor DeviceTran Dinh0% (1)
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- MCP 3909Document44 pagesMCP 3909José HeinNo ratings yet
- 2.488Gbps SFP Optical Transceiver, 300m Reach: DS-SFP-FC-2G-SWDocument8 pages2.488Gbps SFP Optical Transceiver, 300m Reach: DS-SFP-FC-2G-SWtv_romeoNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- 40G QSFP+ PSM IR4 SOQP-3140-01 From SinovoDocument16 pages40G QSFP+ PSM IR4 SOQP-3140-01 From SinovomelissaNo ratings yet
- 1.25Gbps SFP Bi-Directional Transceiver, 20km Reach: GLCBXDDocument9 pages1.25Gbps SFP Bi-Directional Transceiver, 20km Reach: GLCBXDtv_romeoNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Yokogawa Gyro CompassDocument9 pagesYokogawa Gyro CompassruslankryndachNo ratings yet
- PTX Pte300Document2 pagesPTX Pte300tazjuan1No ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- PLJ-8LED Manual Translation enDocument13 pagesPLJ-8LED Manual Translation enandrey100% (2)
- Dual Channel Hall Effect Direction Detection Sensor IC: Description Features and BenefitsDocument12 pagesDual Channel Hall Effect Direction Detection Sensor IC: Description Features and BenefitsPankaj D PatelNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Actions RX-2 - TX-2Document16 pagesActions RX-2 - TX-2xdaaytnpNo ratings yet
- ADC08831/ADC08832 8-Bit Serial I/O CMOS A/D Converters With Multiplexer and Sample/Hold FunctionDocument24 pagesADC08831/ADC08832 8-Bit Serial I/O CMOS A/D Converters With Multiplexer and Sample/Hold Functionrudra_1No ratings yet
- Syn113/Syn115 Datasheet: (300-450Mhz Ask Transmitter)Document18 pagesSyn113/Syn115 Datasheet: (300-450Mhz Ask Transmitter)mhemaraNo ratings yet
- Description Power Range: Analog Servo DriveDocument8 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Catalogue 2009 Solar Inverter en EbookDocument18 pagesCatalogue 2009 Solar Inverter en EbookpvdlichteNo ratings yet
- Assignment: 4G Architecture: Wireless Communication Beee-Viii (M)Document5 pagesAssignment: 4G Architecture: Wireless Communication Beee-Viii (M)Engr Naseeb UllahNo ratings yet
- 6AG11376AA017BA0 Datasheet enDocument3 pages6AG11376AA017BA0 Datasheet ensarah.elfishawyNo ratings yet
- Air Mouse Remote ManualDocument5 pagesAir Mouse Remote ManualAmin BurghulNo ratings yet
- Webench Design Report: Electrical BOMDocument6 pagesWebench Design Report: Electrical BOMthunderer2014No ratings yet
- 1FT7108 5AF71 1FH1 Datasheet enDocument2 pages1FT7108 5AF71 1FH1 Datasheet enRAJIV GandhiNo ratings yet
- PCB Impedance CalloutsDocument38 pagesPCB Impedance CalloutsRalf Conrado ScodelerNo ratings yet
- AM-1600 ManualDocument17 pagesAM-1600 Manualsergio garciaNo ratings yet
- Simulation of N-Way Traffic Lights Using Arduino Uno EnvironmentDocument8 pagesSimulation of N-Way Traffic Lights Using Arduino Uno EnvironmentATSNo ratings yet
- Voltage and Frequency ControlDocument15 pagesVoltage and Frequency Control20446No ratings yet
- Tan-Delta and Capacitance Test Set For HT Generator/Motor TestingDocument3 pagesTan-Delta and Capacitance Test Set For HT Generator/Motor Testingmustafa180567% (3)
- Solar Streetligths Quotation For SubdivisionDocument5 pagesSolar Streetligths Quotation For Subdivisionwella lyn mateoNo ratings yet
- Conveyor BeltDocument2 pagesConveyor BeltttambatambaNo ratings yet
- 5069 User ManualDocument8 pages5069 User ManualSaranga JayawardanaNo ratings yet
- AL125ULB Access Control Power Supply/Charger: OverviewDocument2 pagesAL125ULB Access Control Power Supply/Charger: OverviewtadiganeshNo ratings yet
- Gen Physics 2 - Las 3 - Allas - Version 4Document4 pagesGen Physics 2 - Las 3 - Allas - Version 4J-heart Basabas MalpalNo ratings yet
- Quic Reference Card 737Document2 pagesQuic Reference Card 737robsous100% (19)
- x1105 1.10 Practical Considerations 202410 For LectureDocument18 pagesx1105 1.10 Practical Considerations 202410 For Lecturetasneem haririNo ratings yet
- Proportional and Derivative Control DesignDocument5 pagesProportional and Derivative Control Designahmed shahNo ratings yet
- Delta Dvp-Se I Mul 20130208Document20 pagesDelta Dvp-Se I Mul 20130208daocongdablNo ratings yet
- BrochDocument4 pagesBrochFurQan RustiqadaNo ratings yet
- SUN2000-215KTL-H3 Output Characteristics Curve Version V2 - (202001126)Document6 pagesSUN2000-215KTL-H3 Output Characteristics Curve Version V2 - (202001126)Lindy PortsuNo ratings yet
- PDF Upc - Google SearchDocument2 pagesPDF Upc - Google Searchsoftnyx rakionNo ratings yet
- Rudiments of Materials - SO PILLAIDocument395 pagesRudiments of Materials - SO PILLAIprernadbms80% (5)
- Manual Modulo de Bateria SRT192BPDocument16 pagesManual Modulo de Bateria SRT192BPRANDERONo ratings yet
- Gorenje 460633Document61 pagesGorenje 460633Ivan SimicNo ratings yet