
Notes 3 Applications of Partial Differentiation
Uploaded by
Chris MoodyNotes 3 Applications of Partial Differentiation
Uploaded by
Chris MoodyAdvanced Calculus Chapter 3 Applications of partial dierentiation 37
3 Applications of partial dierentiation
3.1 Stationary points
Higher derivatives
Let U R
2
and f : U R. The partial derivatives f
x
and f
y
are functions of x and y and so we can nd their partial deriva-
tives. We write f
xy
to denote f
y
dierentiated with respect to x.
Similarly f
xx
denotes f
x
dierentiated with respect to x, and f
yx
and f
yy
denote f
x
and f
y
, respectively, dierentiated with respect
to y. The functions f
xx
, f
xy
, f
yx
and f
yy
are the second partial
derivatives of f. For the other notation for partial derivatives, we
write
x
_
f
x
_
or just
2
f
x
2
for f
xx
,
x
_
f
y
_
or just
2
f
xy
for
f
xy
,
y
_
f
x
_
or just
2
f
yx
for f
yx
and
y
_
f
y
_
or just
2
f
y
2
for
f
yy
.
We can also dierentiate the second partial derivatives to get the
third partial derivatives, and so on. For example, f
xyy
, or
3
f
xy
2
, is
the third partial derivative obtained from dierentiating f
yy
with
respect to x.
Example 1 Let f(x, y) = 3x
3
y + 2xy
2
4x
2
y. Then
f
x
(x, y) = 9x
2
y + 2y
2
8xy;
f
y
(x, y) = 3x
3
+ 4xy 4x
2
;
f
xx
(x, y) = 18xy 8y;
f
yx
(x, y) = 9x
2
+ 4y 8x;
f
yy
(x, y) = 4x;
f
xy
(x, y) = 9x
2
+ 4y 8x.
Note that, in Example 1, f
yx
= f
xy
. This is true for all well-behaved
functions. In particular, if f
xy
and f
yx
are both continuous on R
2
(or an open subset U of R
2
) then f
yx
= f
xy
on R
2
(U).
Advanced Calculus Chapter 3 Applications of partial dierentiation 38
Example 2 Let z = x cos 2y. Then
z
x
= cos 2y,
z
y
= 2x sin 2y,
2
z
x
2
= 0,
2
z
yx
= 2 sin 2y,
2
z
xy
= 2 sin 2y,
2
z
y
2
= 4x cos 2y.
Example 3 Let z =
xe
2x
y
n
. Find all the possible values of n given
that
3x
2
z
x
2
xy
2
2
z
y
2
= 12z.
For z =
xe
2x
y
n
we have
z
x
=
e
2x
+ 2xe
2x
y
n
,
=
e
2x
(1 + 2x)
y
n
,
z
y
=
nxe
2x
y
n+1
,
2
z
x
2
=
2e
2x
(1 + 2x) + e
2x
2
y
n
,
=
4e
2x
(x + 1)
y
n
,
2
z
y
2
=
n(n + 1)xe
2x
y
n+2
.
Thus
3x
2
z
x
2
xy
2
2
z
y
2
=
12xe
2x
(x + 1)
y
n
n(n + 1)x
2
e
2x
y
n
=
xe
2x
y
n
(12(x + 1) n(n + 1)x) ,
Advanced Calculus Chapter 3 Applications of partial dierentiation 39
and so
3x
2
z
x
2
xy
2
2
z
y
2
= 12z
xe
2x
y
n
(12(x + 1) n(n + 1)x) =
12xe
2x
y
n
,
12(x + 1) n(n + 1)x = 12,
(Since the result is true for all x and y.)
12x + 12 n(n + 1)x = 12,
12 n(n + 1) = 0,
(Since the result is true for all x.)
n
2
+ n 12 = 0,
(n + 4)(n 3) = 0,
n = 4 or n = 3.
Stationary points
Let U R
2
, and let f : U R. Then (a, b) is a stationary point
of f if the tangent plane at (a, b) is horizontal. That is, the tangent
plane is parallel to the (x, y)-plane, and so has the form z = c for
some constant c.
Since the tangent plane at (a, b) passes through the point (a, b, f(a, b)),
then if it is horizontal it has the form
z = f(a, b).
Recall from Chapter 1 that the equation of the tangent plane at
(a, b) is
f(a, b) z + f
x
(a, b)(x a) + f
y
(a, b)(y b) = 0.
Now, if (a, b) is a stationary point then f(a, b) z = 0, and so
f
x
(a, b)(x a) + f
y
(a, b)(y b) = 0.
The last equation is true for all x and y. Putting x = a and y any
value other than b into this equation gives f
y
(a, b) = 0. Similarly,
putting y = b and x any value other than a into this equation
gives f
x
(a, b) = 0. Hence, if (a, b) is a stationary point of f then
f
x
(a, b) = 0 and f
y
(a, b) = 0. It is straightforward to establish the
converse of this result. Thus, to nd the stationary points of f, we
have to nd the solutions of the equations
f
x
(a, b) = 0,
f
y
(a, b) = 0.
Example 4 Find all of the stationary points of
f(x, y) = x
2
y + 3xy
2
3xy.
Advanced Calculus Chapter 3 Applications of partial dierentiation 40
The partial derivative of f are
f
x
(x, y) = 2xy + 3y
2
3y = y(2x + 3y 3);
f
y
(x, y) = x
2
+ 6xy 3x = x(x + 6y 3).
Putting f
x
(x, y) = f
y
(x, y) = 0 gives
y(2x + 3y 3) = 0, (1)
x(x + 6y 3) = 0. (2)
From equation (1) either y = 0 or 2x + 3y = 3. If y = 0 then
equation 2 gives x(x 3) = 0, and so x = 0, 3. If 2x +3y = 3 then
6y = 64x. Thus, in this case, equation 2 gives x(33x) = 0, and
so x = 0, 1 and y = 1,
1
3
, respectively. Thus the stationary points
of f are (0, 0), (0, 3), (0, 1) and (1,
1
3
).
Types of stationary points
There are three main types of stationary point: a local minimum,
a local maximum and a saddle point. The following diagrams show
a typical graph and contour-plot of these three types.
A local minimum
-2
-1
2
x
1 0
00 y
-1
-2
1
2
1
3
4
2
y
1
2
x
0
-1
-2 0 -1
-2
1
A local maximum
-5
-4
-3
-2
-2 -2
-1
-1 -1
0
0 0
xy
1 1
2 2
y
1
2
x
0
-1
-2 0 -1
-2
1
Advanced Calculus Chapter 3 Applications of partial dierentiation 41
A saddle point
-2 -2
-1
-1 -1
-0.5
x y
0 0
0
1 1
0.5
2 2
1
y
1
-1
1.5
0.5
x
-0.5
0
0.5 -0.5 -1.5
-1.5
1 -1 1.5 0
Classifying stationary points
To determine the nature of a stationary point (a, b) of f we rst
nd the Hessian matrix,
_
f
xx
f
xy
f
xy
f
yy
_
.
Here we are assuming that
f
xy
= f
yx
.
We then evaluate the determinant of the Hessian matrix at the
point at (a, b). That is, we nd the value, at (a, b), of
= det
_
f
xx
f
xy
f
xy
f
yy
_
= f
xx
f
yy
(f
xy
)
2
.
If > 0 and f
xx
> 0 then (a, b) is a local minimum;
If > 0 and f
xx
< 0 then (a, b) is a local maximum;
If < 0 then (a, b) is a saddle point.
If = 0 then this test provides no information about the nature
of the stationary point. Other methods are required to classify the
stationary point in this case.
Example 5 Find all of the stationary points of
f(x, y) = x
2
y + 3xy
2
3xy,
and determine their nature.
From Example 4 the stationary points of f are (0, 0), (0, 3), (0, 1)
and (1,
1
3
), f
x
(x, y) = 2xy + 3y
2
3y = y(2x + 3y 3) and
Advanced Calculus Chapter 3 Applications of partial dierentiation 42
f
y
(x, y) = x
2
+ 6xy 3x = x(x + 6y 3). Now
f
xx
= 2y,
f
xy
= 2x + 6y 3(= f
yx
),
f
yy
= 6x.
Thus
= det
_
2y 2x + 6y 3
2x + 6y 3 6x
_
= 12xy (2x + 6y 3)
2
.
When x = y = 0, = 9 < 0, and so (0, 0) is a saddle point.
When x = 3 and y = 0, = 9 < 0, and so (3, 0) is a saddle point.
When x = 0 and y = 1, = 9 < 0, and so (0, 1) is a saddle point.
When x = 1 and y =
1
3
, = 3 > 0, f
xx
=
2
3
> 0, and so (1,
1
3
) is a
local minimum.
Example 6 Find and classify the stationary points of
f(x, y) = xye
x+y
.
First we nd the partial derivatives of f.
f
x
(x, y) = ye
x+y
+ xye
x+y
= y(x + 1)e
x+y
,
f
y
(x, y) = x(y + 1)e
x+y
.
(Since f is symmetrical in x and y.)
Putting f
x
(x, y) = f
y
(x, y) = 0, and using the fact that e
x+y
= 0,
gives
y(x + 1) = 0, (3)
x(y + 1) = 0. (4)
From equation (3) either y = 0 or x = 1. If y = 0 then equa-
tion (4) gives x = 0. If x = 1 then equation (3) gives y = 1.
Thus the stationary points of f are (0, 0), and (1, 1). Now
f
xx
= ye
x+1
+ y(x + 1)e
x+y
= y(x + 2)e
x+y
,
f
xy
= (y + 1)e
x+y
= x(y + 1)e
x+y
= (y + 1)(x + 1)e
x+y
,
f
yy
= x(y + 2)e
x+y
.
Thus
= det
_
y(x + 2)e
x+y
(y + 1)(x + 1)e
x+y
(y + 1)(x + 1)e
x+y
x(y + 2)e
x+y
_
= e
2(x+y)
_
xy(x + 2)(y + 2) (y + 1)
2
(x + 1)
2
_
.
When x = y = 0, = 1 < 0, and so (0, 0) is a saddle point.
When x = y = 1 , = e
4
> 0, f
xx
= e
2
< 0, and so (1, 1)
is a local maximum.
Advanced Calculus Chapter 3 Applications of partial dierentiation 43
Examples when = 0
We now consider the problem of classifying a stationary point (a, b)
when = 0 at (a, b). There is no single method for determining
the nature of (a, b) in this case, although it is often useful to nd
f(x, y)f(a, b) in order to determine the behaviour of f near (a, b);
an alternative method is to consider how f varies along curves (nor-
mally straight lines) passing through (a, b).
Example 7 Find and classify the stationary points of
f(x, y) = x
2
+ y
4
+ 1.
First we nd the partial derivatives of f.
f
x
(x, y) = 2x,
f
y
(x, y) = 4y
3
.
Putting f
x
(x, y) = f
y
(x, y) = 0, gives x = 0, y = 0. Thus the only
stationary points of f is (0, 0). Now
f
xx
= 2,
f
xy
= 0,
f
yy
= 12y
2
.
Thus
= det
_
2 0
0 12y
2
_
= 24y
2
.
Thus, at (0, 0), = 0, and so the Hessian gives us no information
about the nature of this stationary point. However, for (x, y) =
(0, 0), note that
f(x, y) f(0, 0) = x
4
+ y
4
+ 1 0 0 1,
= x
2
+ y
4
> 0.
Thus f(x, y) > f(0, 0) for all (x, y) = (0, 0). Hence (0, 0) is a local
minimum.
Example 8 Find and classify the stationary points of
f(x, y) = xy
2
x
2
y
2
+ x
4
+ 3.
First we nd the partial derivatives of f.
f
x
= y
2
2xy
2
+ 4x
3
,
f
y
= 2xy 2x
2
y.
Advanced Calculus Chapter 3 Applications of partial dierentiation 44
Putting
f
x
=
f
y
= 0 gives
y
2
2xy
2
+ 4x
3
= 0, (5)
2xy(1 x) = 0. (6)
From equation (6) x = 0, y = 0 or x = 1. If either x = 0 or y = 0
then equation (5) gives y = 0 and x = 0, respectively. If x = 1
then equation (5) gives y
2
= 4, and so y = 2 or y = 2. Thus the
stationary points of f are (0, 0), (1, 2) and (1, 2). Now
2
f
x
2
= 2y
2
+ 12x
2
,
2
f
xy
= 2y 4xy,
2
f
y
2
= 2x 2x
2
.
At the stationary point (0, 0), each of the second derivatives is zero.
Thus = 0 at (0, 0), and so the Hessian gives no information about
the nature of this stationary point. However, for (x, y) = (0, 0),
note that
f(x, y) f(0, 0) = xy
2
x
2
y
2
+ x
4
.
In particular, for x = y we get
f(x, x) f(0, 0) = x
3
x
4
+ x
4
= x
3
.
Since the sign of x
3
is the same as the sign of x, it follows that
f(x, x) f(0, 0) > 0, when x > 0, and f(x, x) f(0, 0) < 0, when
x < 0. Thus (0, 0) is a saddle point.
The nature of the other stationary points of f can be determined
using the Hessian. This is left as an exercise.
Example 9 Find the stationary points of z = (x
2
+ y
2
)e
x
2
y
2
,
and determine their nature.
The partial derivatives of z are
z
x
= 2xe
x
2
y
2
+ (x
2
+ y
2
)(2x)e
x
2
y
2
= 2xe
x
2
y
2
(1 x
2
y
2
),
z
y
= 2ye
x
2
y
2
(1 x
2
y
2
).
(Since z is symmetrical in x and y.)
Putting
z
x
=
z
y
= 0, and using the fact that e
x
2
y
2
= 0 gives
x(1 x
2
y
2
) = 0, (7)
y(1 x
2
y
2
) = 0. (8)
Advanced Calculus Chapter 3 Applications of partial dierentiation 45
From equation (7) either x = 0 or x
2
+ y
2
= 1. If x = 0 then
equation (8) gives y(1y
2
) = 0, and so y = 0, 1 or 1. Thus (0, 0),
(0, 1) and (0, 1) are all stationary points of z. If x
2
+y
2
= 1 then
equation (8) always holds. Thus every point on the circle x
2
+y
2
= 1
is stationary points of z.
From equation (8) either y = 0 or x
2
+ y
2
= 1. The second possi-
bility has already been covered above; if y = 0 then equation (7)
gives x(1 x
2
) = 0, and so x = 0, 1 or 1. Thus (0, 0), (1, 0) and
(1, 0) are all stationary points of z.
Note that all of the points (0, 1), (0, 1), (1, 0) and (1, 0) lie on
the circle x
2
+ y
2
= 1. Thus the stationary points of z are (0, 0)
and every point on the circle x
2
+ y
2
= 1.
Finding the second derivatives of z we get:
2
z
x
2
= (2e
x
2
y
2
+ 2x(2x)e
x
2
y
2
)(1 x
2
y
2
) + 2xe
x
2
y
2
(2x),
= 2e
x
2
y
2
_
(1 2x
2
)(1 x
2
y
2
) 2x
2
_
,
= 2e
x
2
y
2
_
1 x
2
y
2
2x
2
+ 2x
4
+ 2x
2
y
2
2x
2
_
,
= 2e
x
2
y
2
_
1 5x
2
y
2
+ 2x
4
+ 2x
2
y
2
_
,
= 2e
x
2
y
2
_
1 5x
2
y
2
+ 2x
4
+ 2x
2
y
2
_
,
= 2e
x
2
y
2
_
1 4x
2
(x
2
+ y
2
) + 2x
2
(x
2
+ y
2
)
_
,
2
z
xy
= (2y)2xe
x
2
y
2
(1 x
2
y
2
) + 2xe
x
2
y
2
(2y),
= 4xye
x
2
y
2
(2 x
2
y
2
),
2
z
y
2
= 2e
x
2
y
2
_
1 4y
2
(x
2
+ y
2
) + 2y
2
(x
2
+ y
2
)
_
,
(Since z is symmetrical in x and y.)
If x
2
+ y
2
= 1 then
2
z
x
2
= 2e
x
2
y
2
_
1 4x
2
(x
2
+ y
2
) + 2x
2
(x
2
+ y
2
)
_
,
= 2e
1
_
1 4x
2
1 + 2x
2
_
,
= 4x
2
e
1
,
2
z
xy
= 4xye
x
2
y
2
(2 x
2
y
2
),
= 4xye
1
,
2
z
y
2
= 2e
x
2
y
2
_
1 4y
2
(x
2
+ y
2
) + 2y
2
(x
2
+ y
2
)
_
,
= 2e
1
_
1 4y
2
1 + 2y
2
_
,
= 4y
2
e
1
.
Advanced Calculus Chapter 3 Applications of partial dierentiation 46
Thus, in this case,
=
2
z
x
2
2
z
y
2
_
2
z
xy
_
2
,
=
_
4x
2
e
1
_ _
4y
2
e
1
_
_
4xye
1
_
2
,
= 16x
2
y
2
e
2
16x
2
y
2
e
2
= 0.
Thus the Hessian gives us no information about the nature of the
stationary points on the circle x
2
+y
2
= 1. To determine the nature
of these stationary points, we consider the behaviour of z on the
lines y = ax, where a R. On such a line
z(x, y) = z(x, ax),
= (x
2
+ a
2
x
2
)e
x
2
a
2
x
2
,
= (a
2
+ 1)x
2
e
(a
2
+1)x
2
.
Let g(x) = (a
2
+1)x
2
e
(a
2
+1)x
2
. We make the following observations
about g.
Since g can be expressed as a function of x
2
it is symmetrical
about x = 0. That is, g(x) = g(x).
Since a
2
+ 1 > 0, x
2
0 and e
(a
2
+1)x
2
> 0, g(x) 0 for all
x R. Furthermore, g(x) = 0 if and only if x = 0.
As x , g(x) 0.
From these observations we can deduce that g(x) takes its minimum
value at x = 0. The value of g(x) then increases as we move away
from x = 0 until g reaches a maximum; the value then decreases
and approaches 0 as x approaches . The following diagram
shows g for a typical value of a.
From this we can see that every point on the circle x
2
+ y
2
= 1 is
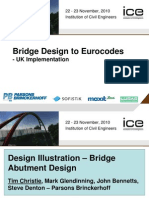
a local maximum of z. We also get that (0, 0) is a local minimum.
Advanced Calculus Chapter 3 Applications of partial dierentiation 47
The following diagram illustrates the graph of f that clearly shows
the local maxima on the circle x
2
+ y
2
= 1.
-2
-2
-1
-1
y
x
0
0
0
0.05
1
0.1
1
0.15
2
0.2
0.25
2
0.3
0.35
Genralization to functions of several variables
We can generalize the idea of a stationary point to a function
of several variables. Let U R
n
, and let f : U R. Then
(a
1
, a
2
, . . . , a
n
) U is a stationary point of f if
f
x
1
(a
1
, a
2
, . . . , a
n
) = f
x
2
(a
1
, a
2
, . . . , a
n
) = = f
x
n
(a
1
, a
2
, . . . , a
n
) = 0.
It is also possible to classify the stationary points, but this is beyond
the scope of the course.
Example 10 Find the stationary points of
f(x, y, z) = (x + y + z)
2
6xyz.
The partial derivatives of f are
f
x
(x, y, z) = 2(x + y + z) 6yz,
f
y
(x, y, z) = 2(x + y + z) 6xz,
f
z
(x, y, z) = 2(x + y + z) 6xy.
Putting f
x
(x, y, z) = f
y
(x, y, z) = f
z
(x, y, z) gives
x + y + z = 3yz, (9)
x + y + z = 3xz, (10)
x + y + z = 3xy. (11)
Combining equations (9) and 10) gives
3yz = 3xz.
Advanced Calculus Chapter 3 Applications of partial dierentiation 48
Thus either z = 0 or x = y.
If z = 0 then equations (9)(11) reduce to x+y = 0 and x+y = 3xy.
From this we get x = y = 0, and so (0, 0, 0) is a stationary point
of f.
If x = y then equations (9)(11) reduce to 2x + z = 3xz and
2x + z = 3x
2
. From this we get xz = x
2
, and so either x = 0 or
x = z. If x = 0 we get x = y = z = 0, giving the stationary point
found earlier. If x = z and x = 0 then 2x+z = 3xz and 2x+z = 3x
2
reduce to x = x
2
, and so x = 1. This gives x = y = z = 1, and so
(1, 1, 1) is a stationary point of f.
Thus the stationary points of f are (0, 0, 0) and (1, 1, 1).
Exercises 3.1
1. Let f(x, y) = 3x
3
y
2
5xy
3
+ 3x
2
y
4
y
5
. Find
2
f
xy
.
2. Determine all of the values of n such that z = 2xy + x
n
y
2n
satises
2x
2
2
z
x
2
y
2
2
z
y
2
+ 18z = 36xy.
3. Find, and classify, the stationary points of
g(x, y) =
1
2
x
2
y 2xy +
2
3
y
3
.
4. Determine the nature of the non-zero stationary points of the
function f given in Example 8.
5. Find the stationary points of
f(x, y, z) = x
3
3x + y
3
3yz + 2z
2
.
3.2 Lagrange multipliers
Let U R
2
and let f, g : U R. We now consider the problem
of nding the maximum and minimum values of f subject to the
constraint g(x, y) = 0.
Method 1 Suppose we can rewrite g(x, y) = 0 in the form y =
h(x), for some function h. Then we can just nd the maximum and
minimum values of F(x) = f(x, h(x)) using the method for calculus
of functions of one variable.
Advanced Calculus Chapter 3 Applications of partial dierentiation 49
Example 11 Find the maximum and minimum values of
f(x, y) = x
3
+ 3xy
2
+ 2xy,
subject to the constraint x + y = 4.
Here g(x, y) = x + y 4, and g(x, y) = 0 gives y = 4 x. (So
h(x) = 4 x.) Thus
F(x) = f(x, 4 x),
= x
3
+ 3x(4 x)
2
+ 2x(4 x),
= x
3
+ 3x(16 8x + x
2
) + 8x 2x
2
,
= 4x
3
26x
2
+ 56x.
Dierentiating F with respect to x we get F
(x) = 12x
2
52x+56,
and so
F
(x) = 0 12x
2
52x + 56 = 0,
3x
2
13x + 14 = 0,
(3x 7)(x 2) = 0,
x = 2,
7
3
.
For x = 2, y = 2 and F(2) = 40, and for x =
7
3
, y =
5
3
and
F(
7
3
) = 39
25
27
. Thus the maximum and minimum values of f(x, y) =
x
3
+ 3xy
2
+ 2xy, subject to the constraint x + y = 4, are 40 and
39
25
27
, respectively.
Method 2 The local maximum and minimum of f(x, y) subject
to the constraint g(x, y) = 0 correspond to the stationary points of
L(x, y, ) = f(x, y) g(x, y).
The variable is call a Lagrange multiplier.
Example 12 Consider the problem from Example 11. Here
f(x, y) = x
3
+ 3xy
2
+ 2xy and g(x, y) = x + y 4. So we let
L(x, y, ) = x
3
+ 3xy
2
+ 2xy (x + y 4).
Now
L
x
= 3x
2
+ 3y
2
+ 2y ,
L
y
= 6xy + 2x ,
L
= (x + y 4).
Advanced Calculus Chapter 3 Applications of partial dierentiation 50
Putting
L
x
=
L
y
=
L
= 0 gives
3x
2
+ 3y
2
+ 2y = , (12)
6xy + 2x = , (13)
x + y 4 = 0. (14)
From equations (12) and (13) we get
3x
2
+ 3y
2
+ 2y = 6xy + 2x.
We can now use equation (14) to eliminate y form the previous
equation. After simplication this gives
12x
2
52x + 56 = 0
The solutions can now be found as in Example 11.
Note that in Example 12 we did not need to nd in order to nd
the solution to the problem.
Lagrange multipliers are particularly useful when it is dicult (or
just algebraically messy!) to rewrite g(x, y) = 0 in the form
y = h(x).
Example 13 Find the maximum and minimum values of
f(x, y) = xy
3
on the circle x
2
+ y
2
= a
2
.
Let g(x, y) = x
2
+y
2
a
2
. Then we want to nd the maximum and
minimum values of f(x, y) subject to the constraint g(x, y) = 0.
Let
L(x, y, ) = xy
3
(x
2
+ y
2
a
2
).
Then
L
x
= y
3
2x,
L
y
= 3xy
2
2y,
L
= x
2
y
2
+ a
2
.
Putting
L
x
=
L
y
=
L
= 0 gives
y
3
2x = 0, (15)
3xy
2
2y = 0, (16)
x
2
+ y
2
= a
2
. (17)
Multiplying equation (15) by y, and equation (16) by x gives
y
4
2xy = 0, (18)
3x
2
y
2
2xy = 0, (19)
Advanced Calculus Chapter 3 Applications of partial dierentiation 51
and so subtracting equation (19) from equation (18) we get
y
4
3x
2
y
2
= 0.
Thus
y
2
(y
2
3x
2
) = 0,
and so either y = 0 or y
2
= 3x
2
.
If y = 0 then equation (17) gives x
2
= a
2
, and so x = a.
If y
2
= 3x
2
then equation (17) gives 4x
2
= a
2
. Thus x =
a
2
, and
for each value of x, y =
3a
2
.
From the preceding calculations, the stationary points of L have
(x, y) = (a, 0), (a, 0),
_
a
2
,
3a
2
_
,
_
a
2
,
3a
2
_
,
_
a
2
,
3a
2
_
or
_
a
2
,
3a
2
_
.
Now f(a, 0) = f(a, 0) = 0, f
_
a
2
,
3a
2
_
= f
_
a
2
,
3a
2
_
=
3
16
3a
4
,
and f
_
a
2
,
3a
2
_
= f
_
a
2
,
3a
2
_
=
3
16
3a
4
.
Thus the maximum and minimum values of f(x, y) = xy
3
on the
circle x
2
+ y
2
= a
2
are
3
16
3a
4
and
3
16
3a
4
, respectively.
Example 14 Find the point on the line 3x+2y = 5 that is closest
to the point (3, 1).
The distance between a general point (x, y) and the point (3, 1) is
_
(x 3)
2
+ (y 1)
2
.
We want to nd the minimum value of this distance subject to the
constraint 3x+2y5 = 0. In fact, it is easier to minimize the square
of the distance, and so we minimize f(x, y) = (x 3)
2
+ (y 1)
2
,
subject to the given constraint.
Let L(x, y, ) = (x 3)
2
+ (y 1)
2
(3x + 2y 5). Then
L
x
= 2(x 3) + 3,
L
y
= 2(y 1) + 2,
L
= 3x 2y + 5.
Putting
L
x
=
L
y
=
L
= 0 gives
2(x 3) + 3 = 0, (20)
2(y 1) + 2 = 0, (21)
3x + 2y = 5. (22)
Advanced Calculus Chapter 3 Applications of partial dierentiation 52
Multiplying equation (20) by 2, and equation (21) by 3 gives
4(x 3) + 6 = 0,
6(y 1) + 6 = 0.
Thus 4(x 3) = 6(y 1). Multiplying out the brackets in this
equation, and simplifying the result gives
2x 3y = 3. (23)
Multiplying equation (22) by 3, and equation (23) by 2 gives
9x + 6y = 15,
4x 6y = 6.
Adding the last two equations together we get 13x = 21, and so
x =
21
13
. Using equation (23) with x =
21
13
we get y =
1
13
. Thus the
point (
21
13
,
1
13
) on the line on the line 3x + 2y = 5 is closest to the
point (3, 1).
Although not required, the distance of the point (
21
13
,
1
13
) to the point
(3, 1) is
f
_
21
13
,
1
13
_
=
_
21
13
3
_
2
+
_
1
13
1
_
2
,
=
_
324
169
+
144
169
=
_
468
169
,
=
_
36
13
=
6
13
.
Lagrange multipliers with more than one constraint
Let U R
n
, and let f, g
1
, g
2
, . . . , g
m
: U R. To nd the maxi-
mum and minimum values of f(x
1
, x
2
, . . . , x
n
), subject to the con-
straints
g
1
(x
1
, x
2
, . . . , x
n
) = 0,
g
2
(x
1
, x
2
, . . . , x
n
) = 0,
.
.
.
g
m
(x
1
, x
2
, . . . , x
n
) = 0,
we nd the stationary points of
L(x
1
, x
2
, . . . , x
n
,
1
,
2
, . . . ,
m
) = f(x
1
, x
2
, . . . , x
n
)
1
g
1
(x
1
, x
2
, . . . , x
n
)
2
g
2
(x
1
, x
2
, . . . , x
n
)
m
g
m
(x
1
, x
2
, . . . , x
n
).
The introduced variables
1
,
2
, . . . ,
m
are called Lagrange mul-
tipliers.
Advanced Calculus Chapter 3 Applications of partial dierentiation 53
Example 15 Find the maximum and minimum values of x + z
at the points where the plane 4x + y + z = 34 and the cylinder
x
2
+ y
2
= 40 intersect.
Here we want to nd the maximum and minimum values of
f(x, y, z) = x + z, subject to the constraints g
1
(x, y, z) = 0 and
g
2
(x, y, z) = 0, where g
1
(x, y, z) = 4x + y + z 34 and
g
2
(x, y, z) = x
2
+ y
2
40. Let
L(x, y, z, , ) = x + z (4x + y + z 34) (x
2
+ y
2
40).
Then
L
x
= 1 4 2x,
L
y
= 2y,
L
z
= 1 ,
L
= (4x + y + z 34),
L
= (x
2
+ y
2
40).
Putting
L
x
=
L
y
=
L
z
=
L
=
L
= 0 gives
4 + 2x = 1, (24)
+ 2y = 0, (25)
= 1, (26)
4x + y + z = 34, (27)
x
2
+ y
2
= 40. (28)
From equation (26), = 1. Substituting this value of into equa-
tions (24) and (25) gives 2x = 3 and 2y = 1, respectively.
Multiplying the second of these equations by 3 gives 6y = 3, and
so
2x = 3 = 6y.
Now = 0 (otherwise equation (25) gives = 0, contrary to = 1)
and so x = 3y. Substituting x = 3y into equation (28) gives 10y
2
= 40.
Thus y
2
= 4, and so y = 2. When y = 2, x = 6, and when y = 2,
x = 6. From equation (27),
z = 34 4x y.
Thus when y = 2 and x = 6, z = 8, and when y = 2 and x = 6,
z = 60. Now f(6, 2, 8) = 14 and f(6, 2, 60) = 54. Thus the
maximum and minimum values of x + z at the points where the
plane 4x + y + z = 34 and the cylinder x
2
+ y
2
= 40 intersect are
54 and 14, respectively.
Advanced Calculus Chapter 3 Applications of partial dierentiation 54
Example 16 Find the maximum and minimum values of
f(x, y, z) = xy + 4z subject to the constraints x + y + z = 0 and
x
2
+ y
2
+ z
2
= 24.
Let
L(x, y, z, , ) = xy + 4z (x + y + z) (x
2
+ y
2
+ z
2
24).
Then
L
x
= y 2x,
L
y
= x 2y,
L
z
= 4 2z,
L
= (x + y + z),
L
= (x
2
+ y
2
+ z
2
24).
Putting
L
x
=
L
y
=
L
z
=
L
=
L
= 0 gives
y 2x = , (29)
x 2y = , (30)
4 2z = , (31)
x + y + z = 0, (32)
x
2
+ y
2
+ z
2
= 24. (33)
From equations (29) and (30) we get
y 2x = = x 2y.
Thus
y x = 2(x y),
and so either x = y or =
1
2
. We now consider these two possi-
bilities separately.
If x = y then equation (32) gives 2x + z = 0, and so z = 2x.
Then equation (33) gives x
2
+x
2
+4x
2
= 24, and so x
2
= 4. Hence
x = 2, and so
x = 2, y = 2, z = 4.
If =
1
2
then equations (29) and (31) give x+y = and z+4 = ,
respectively. Thus
x + y = = z + 4,
and so
x + y z = 4. (34)
Advanced Calculus Chapter 3 Applications of partial dierentiation 55
Subtracting equation (34) from equation (32) gives 2z = 4, and
so z = 2. Adding equations (34) and (32) gives 2(x +y) = 4, and
so y = 2 x. Putting y = 2 x and z = 2 into equation (33) we
get
x
2
+ (2 x)
2
+ (2)
2
= 24 x
2
+ (4 4x + x
2
) + 4 = 24,
x
2
2x 8 = 0,
(x 4)(x + 2) = 0,
x = 2, 4.
When x = 2, y = 4 and z = 2, and when x = 4, y = 2 and
z = 2.
From the preceding calculations we have found four stationary
points of L, namely (2, 2, 4), (2, 2, 4), (2, 4, 2) and (4, 2, 2).
Now f(2, 2, 4) = 12, f(2, 2, 4) = 20, f(2, 4, 2) = 16 and
f(4, 2, 2) = 16. Thus the maximum and minimum values of
f(x, y, z), subject to the given constraints, are 20 and 16, respec-
tively.
Exercises 3.2
1. Find the maximum and minimum values of f(x, y) = xy on
the ellipse 18x
2
+ 2y
2
= 25.
2. Find the maximum and minimum values of 2x + y on the
ellipse x
2
+ xy + 4y
2
+ 2x + 16y + 7 = 0.
3. Find the maximum and minimum values of xy
2
on the circle
x
2
+ y
2
= 1.
4. Find the minimum distance from the origin to a point on the
curve where the plane 2y + 4z = 15 and the surface
z
2
= 4(x
2
+ y
2
) intersect.
3.3 The chain rule
In this section we generalize the chain rule for functions of one
variable to functions of more than one variable. First we extend
our idea of a real function.
Multivariable functions
Let U R
n
. A (multivariable) function f : U R
m
deter-
mines for each point x = (x
1
, x
2
, . . . , x
n
) of U a unique point
y = (y
1
, y
2
, . . . , y
m
) of R
m
. We write f(x
1
, x
2
, . . . , x
n
) = (y
1
, y
2
, . . . , y
m
)
or f(x) = y.
Advanced Calculus Chapter 3 Applications of partial dierentiation 56
Each coordinate of y is uniquely determined by (x
1
, x
2
, . . . , x
n
).
That is, each coordinate of y can be thought of as a function of
(x
1
, x
2
, . . . , x
n
). So there are functions f
1
, f
2
, . . . , f
m
: U R
m
such that
f(x
1
, x
2
, . . . , x
n
) = (f
1
(x
1
, x
2
, . . . , x
n
), f
2
(x
1
, x
2
, . . . , x
n
), . . . , f
m
(x
1
, x
2
, . . . , x
n
)),
or f(x) = (f
1
(x), f
2
(x), . . . , f
m
(x)).
Example 17 Let f : R
2
R
2
, with f(x, y) = (x
2
y, x + 3y). Here
f
1
(x, y) = x
2
y and f
2
(x, y) = x+3y. An alternative way of dening
f is to write f(x, y) = (f
1
, f
2
) where f
1
(x, y) = x
2
y and
f
2
(x, y) = x + 3y.
Example 18 Let f : R R
3
, with f(t) = (t, cos t, sin t). Func-
tions of one variable from R to R
m
, like this one (that has m = 3),
dene a parametric curve in R
m
. If we plot the function f as t
varies we obtain a spiral going round the x-axis, as illustrated in
the following diagram.
Example 19 Let f : R
3
R
2
, with f(x, y, z) = (u, v), where
u = x + y z and v = 2x y 2z.
Let U R
n
, and let f : U R
m
with f(x) = f
1
(x), f
2
(x), . . . , f
m
(x)).
Then the derivative of f at x, denoted by f
(x) or
df
dx
, is the mn
matrix whose (i, j)th entry is
f
i
x
j
. That is,
f
(x) =
_
_
_
_
_
_
f
1
x
1
f
1
x
2
f
1
x
n
f
2
x
1
f
2
x
2
f
2
x
n
.
.
.
.
.
.
.
.
.
f
m
x
1
f
m
x
2
f
m
x
n
_
_
_
_
_
_
.
Example 20 Let f : R
2
R
2
, with f(x, y) = (x
2
y, x + 3y). Here
f
1
(x, y) = x
2
y and f
2
(x, y) = x + 3y, and
f
(x, y) =
_
f
1
x
f
1
y
f
2
x
f
2
y
_
=
_
2xy x
2
1 3
_
.
Example 21 Let f : R R
3
, with f(t) = (t, cos t, sin t). Then
f
(t) =
_
_
_
d
dt
(t)
d
dt
(cos t)
d
dt
(sin t)
_
_
_
=
_
_
1
sin t
cos t
_
_
.
Advanced Calculus Chapter 3 Applications of partial dierentiation 57
Example 22 Let f : R
3
R
2
, with f(x, y) = (u, v), where u =
x + y z and v = 2x y 2z. Then
f
(x, y, z) =
_
u
x
u
y
u
z
v
x
v
y
v
z
_
=
_
1 1 1
2 1 2
_
.
Simple cases of the chain rule
In this section we consider three simple cases of the chain rule, and
illustrate them with an example.
Case 1 For U R
2
and V R, let g : U R and f : V R
and let F : U R with
F(x, y) = (f g)(x, y) = f(g(x, y)).
Then
F
x
=
df
dg
g
x
,
F
y
=
df
dg
g
y
.
Example 23 Let F(x, y) = (x
2
+3xy y
2
)
4
. Then F(x, y) = f(g)
where g = x
2
+ 3xy y
2
and f = g
4
. Thus
F
x
=
df
dg
g
x
,
= 4g
3
(2x + 3y),
= 4(x
2
+ 3xy y
2
)
3
(2x + 3y).
F
y
=
df
dg
g
y
,
= 4g
3
(3x 2y),
= 4(x
2
+ 3xy y
2
)
3
(3x 2y).
Example 24 Let f : R R and let z = f(x
2
+ y
2
). Show that
y
z
x
= x
z
y
.
Let g(x, y) = x
2
+ y
2
. Then z(x, y) = f(g(x, y)). Thus
z
x
=
df
dg
g
x
,
= 2x
df
dg
.
z
y
=
df
dg
g
y
,
= 2y
df
dg
.
Advanced Calculus Chapter 3 Applications of partial dierentiation 58
Hence
y
z
x
= 2xy
df
dg
= x
z
y
.
Case 2 For U R and V R
2
, let g : U R
2
, with g(t) =
(u(t), v(t)), and f : V R and let F : U R with
F(t) = (f g)(t) = f(g(t)).
Then
dF
dt
=
df
du
u
t
+
df
dv
v
t
.
Example 25 Let F(t) = u
2
+ v
2
, where u = t cos t and v = sin t.
Then F(t) = f(g(t)) where g(t) = (u(t), v(t)) and f(u, v) = u
2
+v
2
.
Thus
dF
dt
=
df
du
u
t
+
df
dv
v
t
,
= 2u(cos t t sin t) + 2v cos t,
= 2t cos t(cos t t sin t) + 2 sin t cos t,
= 2 cos t(t cos t t
2
sin t + 2 sin t).
Case 3 For U R
2
and V R
2
, let g : U R
2
, with g(x, y) =
(u(x, y), v(x, y)), and f : V R, and let F : U R with
F(x, y) = (f g)(x, y) = f(g(x, y)).
Then
F
x
=
f
du
u
x
+
f
dv
v
x
,
F
y
=
f
du
u
y
+
f
dv
v
y
.
Example 26 Let u = x
2
y and v = xy
3
and let F(x, y) = 2u + v
2
.
Then F(x, y) = f(g(x, y)) where f(u, v) = 2u + v
2
and g(x, y) =
(u, v) = (x
2
y, xy
3
). Thus
F
x
=
f
du
u
x
+
f
dv
v
x
,
= 2(2xy) + 2vy
3
,
= 4xy + 2xy
6
,
= 2xy(2 + y
5
).
F
y
=
f
du
u
y
+
f
dv
v
y
,
= 2x
2
+ 2v(3xy
2
),
= 2x
2
+ 6x
2
y
5
,
= 2x
2
(1 + 3y
5
).
Advanced Calculus Chapter 3 Applications of partial dierentiation 59
Two general cases of the chain rule
Here we consider two general cases of the chain rule.
General case 1 Suppose u
1
, u
2
, . . . , u
n
are functions of a single
variable t, and g is a function of n variables. Let
G(t) = g(u
1
, u
2
, . . . , u
n
). Then G is a function of t and
dG
dt
=
g
u
1
du
1
dt
+
G
u
2
du
2
dt
+ +
g
u
n
du
n
dt
.
Example 27 Let u = t
2
, v =
t and w =
1
t
, and let
G(t) = g(u, v, w) =
uv
w
. Then
dG
dt
=
g
u
du
dt
+
g
v
dv
dt
+
g
w
dw
dt
,
=
_
v
w
_
(2t) +
_
u
w
_
(
1
2
t
1
2
) +
_
uv
w
2
_
_
1
t
2
_
,
= 2t
2
t +
1
2
t
5
2
+ t
2
t,
=
7
2
t
5
2
.
Note that in Example 27, G(t) =
uv
w
=
t
2
t
1
t
= t
3
t = t
7
2
, and so
dG
dt
=
7
2
t
5
2
. Thus, in this example, it is easier to nd G as a function
of t and then dierentiate it with respect to t, rather than use the
chain rule.
General case 2 Suppose u
1
, u
2
, . . . , u
n
are functions of m vari-
ables x
1
, x
2
, . . . , x
n
, and h is a function of n variables. Let
H(x
1
, x
2
, . . . , x
m
) = h(u
1
, u
2
, . . . , u
n
). Then H is a function of
x
1
, x
2
, . . . , x
m
and, for each i, with 1 i m,
H
x
i
=
h
u
1
u
1
x
i
+
h
u
2
u
2
x
i
+ +
h
u
n
u
n
x
i
Example 28 Let h = uv + uw + vw, where u = y
2
, v = x
2
+ 2xy
and w = x
2
2xy. Then, using the chain rule, we get
h
x
=
h
u
u
x
+
h
v
v
x
+
h
w
w
x
,
= (v + w)(0) + (u + w)(2x + 2y) + (u + v)(2x 2y),
= 2(x
2
2xy + y
2
)(x + y) + 2(x
2
+ 2xy + y
2
)(x y),
= 2(x y)
2
(x + y) + 2(x + y)
2
(x y),
= 2(x y)(x + y)(x y + x + y),
= 4x(x y)(x + y).
Advanced Calculus Chapter 3 Applications of partial dierentiation 60
Similarly,
h
y
=
h
u
u
y
+
h
v
v
y
+
h
w
w
y
,
= (v + w)(2y) + (u + w)(2x) + (u + v)(2x),
= (2x
2
)(2y) + (x
2
2xy + y
2
)(2x) + (x
2
+ 2xy + y
2
)(2x),
= 4x
2
y + 2x(x y)
2
2x(x + y)
2
,
= 4x
2
y + 2x
_
(x y)
2
(x + y)
2
_
,
= 4x
2
y + 2x ((2x)(2y)) ,
= 4x
2
y 8x
2
y,
= 4x
2
y.
Here we have used the identity:
A
2
B
2
= (A + B)(AB).
Example 29 Let f be a function of two variables x and y, with
x = r cos and y = r sin . Find
f
x
and
f
y
in terms of r, ,
f
r
and
f
.
Using the chain rule gives
f
r
=
f
x
x
r
+
f
y
y
r
= cos
f
x
+ sin
f
y
.
Similarly,
f
=
f
x
x
+
f
y
y
= r sin
f
x
+ r cos
f
y
.
Thus
f
r
= cos
f
x
+ sin
f
y
, (35)
f
= r sin
f
x
+ r cos
f
y
. (36)
Multiplying equation (35) by r cos and equation (36) by sin gives
r cos
f
r
= r cos
2
f
x
+ r cos sin
f
y
, (37)
sin
f
= r sin
2
f
x
+ r cos sin
f
y
. (38)
Subtracting equation (38) from equation (37) gives
r cos
f
r
sin
f
= r(cos
2
+ sin
2
)
f
x
.
Now, since cos
2
+ sin
2
= 1, we get
f
x
= cos
f
r
sin
r
f
.
Using a similar method, or by substituting for
f
x
in either equa-
tion (35) or equation (36), we get
f
y
= sin
f
r
+
cos
r
f
.
Advanced Calculus Chapter 3 Applications of partial dierentiation 61
Example 30 (Eulers Theorem on homogeneous functions.)
A function f : R
2
R is homogeneous of degree n if, for all
x, y, R,
f(x, y) =
n
f(x, y).
For example, f(x, y) = xy is homogeneous of degree 2 since
f(x, y) = (x)(y) =
2
xy =
2
f(x, y).
Suppose that g : R
2
R is homogeneous of degree n. For x, y R,
let G : R R where
G() = g(x, y) = g(u, v),
u = x and v = y.
By the chain rule
dG
d
=
g
u
du
d
+
g
v
dv
d
,
= x
g
u
+ y
g
v
.
However, since g is homogeneous of degree n, G() =
n
g(x, y).
Thus
dG
d
= n
n1
g(x, y).
Comparing the two expressions for
dG
d
gives
n
n1
g(x, y) = x
g
u
+ y
g
v
. (39)
Equation (39) is true for all . If we put = 1 then u = x, v = y,
and equation (39) gives
ng(x, y) = x
g
x
+ y
g
y
.
This result is known as Eulers Theorem on homogeneous functions.
Exercises 3.3
1. Let g(x, y) = x
2
+ 2xy y
2
, x = 3t 1 and y = t
2
. Use the
chain rule to nd
dg
dt
.
2. Let f : R R, and let z = f(xy).
(a) Show that x
z
x
y
z
y
= 0.
(b) Verify the result in part (a) for the particular case when
f(t) = 2t
3
t
2
+ 3t.
Advanced Calculus Chapter 3 Applications of partial dierentiation 62
3. Let F be a function of u and v, where u = x
2
+y
2
and v = xy.
Find
F
u
and
F
v
in terms of x, y,
F
x
and
F
y
.
4. Let g(x, y) =
3xy
3
2x
2
y
2
4x + 5y
.
(a) Show that g is homogeneous of degree 3.
(b) Verify Eulers Theorem on homogeneous functions by
evaluating x
g
x
+ y
g
y
directly.
3.4 Taylor series
Let U R, and let f : U R such that the derivative, and all the
higher derivatives, of f exist on U. For h U,
f(x) = f(h)+(xh)f
(h)+
(x h)
2
2!
f
(h)+ +
(x h)
n
n!
f
(n)
(h)+ .
This is the Taylor series of f centred at h. If the series is trun-
cated after n +1 terms we get the Taylor polynomial or Taylor
approximation of f, of degree n, centred at h.
If we replace x with x + h throughout in the Taylor series of f, we
get the following alternative way of expressing the Taylor series of
f centred at h:
f(x + h) = f(h) + xf
(h) +
x
2
2!
f
(h) + +
x
n
n!
f
(n)
(h) + .
The following are the Taylor series of some standard functions. The
rst three are centred at 0, and are valid for all x R; the other
two are centred at 1, and are valid for x R with |x| < 1.
e
x
= 1 + x +
x
2
2!
+
x
3
3!
+ +
x
n
n!
+ . . . ,
sin x = x
x
3
3!
+
x
5
5!
x
7
7!
+ + (1)
n
x
2n+1
(2n + 1)!
+ . . . ,
cos x = 1
x
2
2!
+
x
4
4!
x
6
6!
+ (1)
n
x
2n
(2n)!
+ . . . ,
ln(x + 1) = x
x
2
2
+
x
3
3
x
4
4
+ + (1)
n+1
x
n
n
+ ,
(1 + x)
= 1 + x +
( 1)x
2
2!
+
( 1)( 2)x
3
3!
+
+
( 1) . . . ( n + 1)x
n
n!
+ .
Advanced Calculus Chapter 3 Applications of partial dierentiation 63
Now let U R
2
, and let f : U R such that the partial deriva-
tives, and all the higher partial derivatives, of f exist and are con-
tinuous on U. For (X, Y ) U,
f(X + h, Y + k) = f(X, Y ) + (hf
x
(X, Y ) + kf
y
(X, Y )) +
+
1
2!
_
h
2
f
xx
(X, Y ) + 2hkf
xy
(X, Y ) + k
2
f
yy
(X, Y )
_
+
+
1
3!
_
h
3
f
xxx
(X, Y ) + 3h
2
kf
xxy
(X, Y ) + 3hk
2
f
xyy
(X, Y )+
k
3
f
yyy
(X, Y )
_
+
+
1
n!
n
i=0
_
n
i
_
h
ni
k
i
f
(ni,i)
(X, Y ) + ,
where
_
n
i
_
=
n!
i!(n i)!
, and f
(r,s)
denotes the (r + s)th partial The notation f
(r,s)
is my own
creation and maybe
non-standard. I have not found
any standard notation in any
books!
derivative of f found by dierentiating r times with respect to x
and s times with respect to y.
This is the Taylor series of f centred at (X, Y ). If the series
is truncated after n + 1 terms we get the Taylor polynomial or
Taylor approximation of f, of degree n, centred at h.
Example 31 Expand x
2
y + 3y 2 in powers of x 1 and y + 2.
Let f(x, y) = x
2
y + 3y 2. Putting x = 1 + h and y = 2 + k we
can obtain the required expansion by nding the Taylor series of f
centred at (1, 2). Now
f
x
(x, y) = 2xy,
f
y
(x, y) = x
2
+ 3,
f
xx
(x, y) = 2y,
f
xy
(x, y) = 2x,
f
yy
(x, y) = 0,
f
xxx
(x, y) = 0,
f
xxy
(x, y) = 2,
f
xyy
(x, y) = 0,
f
yyy
(x, y) = 0,
Advanced Calculus Chapter 3 Applications of partial dierentiation 64
and all higher derivatives are 0. Thus
f(x, y) = f(1 + h, 2 + k),
= f(1, 2) + hf
x
(1, 2) + kf
y
(1, 2)
+
1
2!
_
h
2
f
xx
(1, 2) + 2hkf
xy
(1, 2) + k
2
f
yy
(1, 2)
_
+
1
3!
_
3h
2
kf
xxy
(1 2)
_
,
= 10 4h + 4k +
1
2
_
4h
2
+ 4hk + 0k
2
_
+
1
6
(6h
2
k),
= 10 4h + 4k 2h
2
+ 2hk + h
2
k,
= 10 4(x 1) + 4(y + 2) 2(x 1)
2
+ 2(x 1)(y + 2) + (x 1)
2
(y + 2),
since h = x 1 and k = y + 2.
Example 32 Find the Taylor approximation of degree 1 for
f(x, y) =
12
x
2
+ xy + y
2
centred at (2,2). Use your answer to estimate f(2.1, 1.8).
The partial derivatives of f are
f
x
(x, y) =
12(2x + y)
(x
2
+ xy + y
2
)
2
,
f
y
(x, y) =
12(x + 2y)
(x
2
+ xy + y
2
)
2
.
Now, f(2, 2) = 1, f
x
(2, 2) =
1
2
and f
y
(2, 2) =
1
2
. Thus
f(2 + h, 2 + k) = f(2, 2) + hf
x
(2, 2) + kf
y
(2, 2),
= 1
1
2
h
1
2
k.
Using this Taylor approximation for f with h = 0.1 and k = 0.2
we get
f(2.1, 1.8) = f(2 + h, 2 + k),
1
1
2
0.1
1
2
(0.2),
= 1.05.
Note that f(2.1, 1.8) 1.04987, so the approximation given by the
Taylor is quite good in this case.
Exercises 3.4 1. Find the Taylor polynomial of degree 2 of
g(x, y) =
xy + 1
x + 2
centred at the point (0, 0). Use your an-
swer to estimate g(0.1, 0.2).
You might also like
- 2 Right Censoring and Kaplan-Meier Estimator: ST 745, Daowen ZhangNo ratings yet2 Right Censoring and Kaplan-Meier Estimator: ST 745, Daowen Zhang33 pages
- Fernando, Logit Tobit Probit March 2011No ratings yetFernando, Logit Tobit Probit March 201119 pages
- Limit, Continuity and DifferentiabilityNo ratings yetLimit, Continuity and Differentiability64 pages
- The Probit Model: Alexander Spermann University of Freiburg University of Freiburg Sose 2009No ratings yetThe Probit Model: Alexander Spermann University of Freiburg University of Freiburg Sose 200938 pages
- Lecture Notes in Statistics: GLIM 82: Proceedings of The International Conference On Generalised Linear ModelsNo ratings yetLecture Notes in Statistics: GLIM 82: Proceedings of The International Conference On Generalised Linear Models194 pages
- FALLSEM2019-20 MAT1011 ETH VL2019201005249 Reference Material II 19-Sep-2019 Solved-Problems Double-and-Triple-Integrals-2 PDF100% (1)FALLSEM2019-20 MAT1011 ETH VL2019201005249 Reference Material II 19-Sep-2019 Solved-Problems Double-and-Triple-Integrals-2 PDF18 pages
- Limit Theorems: By: Ivan Sutresno Hadi SujotoNo ratings yetLimit Theorems: By: Ivan Sutresno Hadi Sujoto19 pages
- Lecture 9 - Discrete Fourier Transform and Fast Fourier Transform (I)No ratings yetLecture 9 - Discrete Fourier Transform and Fast Fourier Transform (I)19 pages
- Indeterminate Forms and LHopitals Rule Presentation SlidesNo ratings yetIndeterminate Forms and LHopitals Rule Presentation Slides45 pages
- 5 L L EC533: Digital Signal Processing: DFT and FFTNo ratings yet5 L L EC533: Digital Signal Processing: DFT and FFT20 pages
- Methods of Integration: Substitution MethodNo ratings yetMethods of Integration: Substitution Method42 pages
- MTH4100 Calculus I: Lecture Notes For Week 2 Thomas' Calculus, Sections 1.3 To 1.5No ratings yetMTH4100 Calculus I: Lecture Notes For Week 2 Thomas' Calculus, Sections 1.3 To 1.513 pages
- Lesson 2-Evaluation of Limits of Functions100% (1)Lesson 2-Evaluation of Limits of Functions21 pages
- Numerical Differentiation and IntegrationNo ratings yetNumerical Differentiation and Integration17 pages
- Joint and Conditional Probability DistributionsNo ratings yetJoint and Conditional Probability Distributions52 pages
- MATH2023 Multivariable Calculus Chapter 3 Partial Derivatives L2/L3 (Fall 2019)No ratings yetMATH2023 Multivariable Calculus Chapter 3 Partial Derivatives L2/L3 (Fall 2019)36 pages
- 42-105-42359-University Salt Draw 3820PH-EP EnergyNo ratings yet42-105-42359-University Salt Draw 3820PH-EP Energy3 pages
- Weller WHP 3000 User Manual (Multi-Lang)No ratings yetWeller WHP 3000 User Manual (Multi-Lang)60 pages
- ME - MD Mecha. Robotics, PP - SOL - 2650No ratings yetME - MD Mecha. Robotics, PP - SOL - 265035 pages
- Neutralizing Amine Overdosing Risks - Vacuum Overhead - FlatNo ratings yetNeutralizing Amine Overdosing Risks - Vacuum Overhead - Flat1 page
- Plyometric Training and Distance RunningNo ratings yetPlyometric Training and Distance Running8 pages
- FTRE-2016-17-C-IX (Going To X) - PAPER-1-IQ+S&M75% (4)FTRE-2016-17-C-IX (Going To X) - PAPER-1-IQ+S&M20 pages
- Plastic Deformation and Perforation of Thin Plates Resulting From Projectile Impact?No ratings yetPlastic Deformation and Perforation of Thin Plates Resulting From Projectile Impact?23 pages
- Modeling and Control of A Distributed Generation SystemNo ratings yetModeling and Control of A Distributed Generation System24 pages
- Soil Mechanics Laboratory Manual 6th Edition by Das B M PDF100% (4)Soil Mechanics Laboratory Manual 6th Edition by Das B M PDF165 pages























































































- 2 Right Censoring and Kaplan-Meier Estimator: ST 745, Daowen Zhang2 Right Censoring and Kaplan-Meier Estimator: ST 745, Daowen Zhang
- The Probit Model: Alexander Spermann University of Freiburg University of Freiburg Sose 2009The Probit Model: Alexander Spermann University of Freiburg University of Freiburg Sose 2009
- Lecture Notes in Statistics: GLIM 82: Proceedings of The International Conference On Generalised Linear ModelsLecture Notes in Statistics: GLIM 82: Proceedings of The International Conference On Generalised Linear Models
- FALLSEM2019-20 MAT1011 ETH VL2019201005249 Reference Material II 19-Sep-2019 Solved-Problems Double-and-Triple-Integrals-2 PDFFALLSEM2019-20 MAT1011 ETH VL2019201005249 Reference Material II 19-Sep-2019 Solved-Problems Double-and-Triple-Integrals-2 PDF
- Lecture 9 - Discrete Fourier Transform and Fast Fourier Transform (I)Lecture 9 - Discrete Fourier Transform and Fast Fourier Transform (I)
- Indeterminate Forms and LHopitals Rule Presentation SlidesIndeterminate Forms and LHopitals Rule Presentation Slides
- 5 L L EC533: Digital Signal Processing: DFT and FFT5 L L EC533: Digital Signal Processing: DFT and FFT
- MTH4100 Calculus I: Lecture Notes For Week 2 Thomas' Calculus, Sections 1.3 To 1.5MTH4100 Calculus I: Lecture Notes For Week 2 Thomas' Calculus, Sections 1.3 To 1.5
- MATH2023 Multivariable Calculus Chapter 3 Partial Derivatives L2/L3 (Fall 2019)MATH2023 Multivariable Calculus Chapter 3 Partial Derivatives L2/L3 (Fall 2019)
- 42-105-42359-University Salt Draw 3820PH-EP Energy42-105-42359-University Salt Draw 3820PH-EP Energy
- Neutralizing Amine Overdosing Risks - Vacuum Overhead - FlatNeutralizing Amine Overdosing Risks - Vacuum Overhead - Flat
- Plastic Deformation and Perforation of Thin Plates Resulting From Projectile Impact?Plastic Deformation and Perforation of Thin Plates Resulting From Projectile Impact?
- Modeling and Control of A Distributed Generation SystemModeling and Control of A Distributed Generation System
- Soil Mechanics Laboratory Manual 6th Edition by Das B M PDFSoil Mechanics Laboratory Manual 6th Edition by Das B M PDF