Fast Georeferencing Images Throuth Generalized Photogr Ammetr Ic Algorithms
Fast Georeferencing Images Throuth Generalized Photogr Ammetr Ic Algorithms
Download as pdf or txt
You might also like
- Readings PhotogrammetryDocument5 pagesReadings PhotogrammetryYenny Maribel Bernal RamosNo ratings yet
- Topographic Normalization LabDocument7 pagesTopographic Normalization LabsatoruheineNo ratings yet
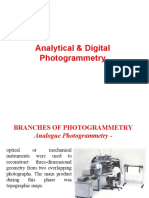
- Analytical & Digital PhotogrammetryDocument46 pagesAnalytical & Digital PhotogrammetryLuis Marquez Guillen100% (3)
- Lecture Notes On Remote Sensing & Gis: IV B. Tech II Semester (JNTU (A) - R13)Document13 pagesLecture Notes On Remote Sensing & Gis: IV B. Tech II Semester (JNTU (A) - R13)Kushana Saikirann100% (1)
- Siebel NotesDocument21 pagesSiebel Notessft786No ratings yet
- Comparison Between 2-D and 3-D Transformations For Geometric Correction of IKONOS ImagesDocument6 pagesComparison Between 2-D and 3-D Transformations For Geometric Correction of IKONOS ImagesRahul RathodNo ratings yet
- Digital Photogrammetry2014Document125 pagesDigital Photogrammetry2014iurist_nicoletaNo ratings yet
- A Comparison Study Between Collinearity ConditionDocument8 pagesA Comparison Study Between Collinearity ConditionMustapha WarithNo ratings yet
- Time Domain Back Projection Algorithms For SARDocument4 pagesTime Domain Back Projection Algorithms For SARnaivedya_mishraNo ratings yet
- 2001 Dec 1347-1357 PDFDocument11 pages2001 Dec 1347-1357 PDFDiaz CkyNo ratings yet
- V.kartHIKEYAN Published Article3Document5 pagesV.kartHIKEYAN Published Article3karthikeyan.vNo ratings yet
- Multi-Frame Alignment of Planes: Lihi Zelnik-Manor Michal IraniDocument6 pagesMulti-Frame Alignment of Planes: Lihi Zelnik-Manor Michal IraniQuách Thế XuânNo ratings yet
- A Proposed Model For Segmentation of Spot Images: KEY WORDS: Photogrammetry, Automation, Extraction, Fuzzy, ImageDocument3 pagesA Proposed Model For Segmentation of Spot Images: KEY WORDS: Photogrammetry, Automation, Extraction, Fuzzy, ImageKobalt von KriegerischbergNo ratings yet
- Senzor de OrientareDocument6 pagesSenzor de OrientareOlidelaPoliNo ratings yet
- The Importance of Ground Control PointsDocument8 pagesThe Importance of Ground Control Points王志培No ratings yet
- Directional Light MapsDocument9 pagesDirectional Light MapsAndrei BadilaNo ratings yet
- Geologic Mapping With Scaled 3D ImagesDocument5 pagesGeologic Mapping With Scaled 3D ImagesHumberto Diomedi MirandaNo ratings yet
- Hunterrgisc 9216 D 3Document27 pagesHunterrgisc 9216 D 3api-248724607No ratings yet
- Automatic Tie-Point and Wire-Frame Generation Using Oblique Aerial ImageryDocument22 pagesAutomatic Tie-Point and Wire-Frame Generation Using Oblique Aerial ImageryDamas_SamuelNo ratings yet
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 pagesA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingjayachandradbzNo ratings yet
- Ilovepdf - Merged (1) - MergedDocument23 pagesIlovepdf - Merged (1) - MergedMuhammad HgkNo ratings yet
- Ilovepdf MergedDocument17 pagesIlovepdf MergedMuhammad HgkNo ratings yet
- A Rigorous Model For High Resolution Satellite Imagery OrientationDocument10 pagesA Rigorous Model For High Resolution Satellite Imagery OrientationMeng ShareNo ratings yet
- Self Calibration of Small and Medium Format Digital CamerasDocument6 pagesSelf Calibration of Small and Medium Format Digital CamerasOke Joko HaniloNo ratings yet
- Exterior Orientation For Remote Sensing Image With High Resolution by Linear FeatureDocument4 pagesExterior Orientation For Remote Sensing Image With High Resolution by Linear FeatureKobalt von KriegerischbergNo ratings yet
- Bergamin Vitti ZatelliDocument9 pagesBergamin Vitti Zatelliashu03fr053No ratings yet
- What Is PhotogrammetryDocument17 pagesWhat Is PhotogrammetryNatasha JacobsNo ratings yet
- Articol Simpozion-Corectat PartialDocument6 pagesArticol Simpozion-Corectat PartialAlexandru AnaNo ratings yet
- Historical Analysis of The Land Movement in LandslDocument12 pagesHistorical Analysis of The Land Movement in LandslradebetshwariNo ratings yet
- Towards Automatic Relative Orientation For Architectural PhotogrammetryDocument6 pagesTowards Automatic Relative Orientation For Architectural PhotogrammetrySentinel BergNo ratings yet
- Camera Self-Calibration Theory and ExperimentsDocument14 pagesCamera Self-Calibration Theory and ExperimentsAndrey SolanoNo ratings yet
- 3차원 흐름 (원문)Document8 pages3차원 흐름 (원문)Yura JoNo ratings yet
- Automatic Rectification of Perspective Distortion From A Single Image Using Plane Homography PDFDocument12 pagesAutomatic Rectification of Perspective Distortion From A Single Image Using Plane Homography PDFAnonymous lVQ83F8mCNo ratings yet
- Lighting DesignDocument4 pagesLighting DesignulyjohnignacioNo ratings yet
- True Orthophoto Generation From Uav Images Implementation ofDocument7 pagesTrue Orthophoto Generation From Uav Images Implementation ofHolman Latorre BossaNo ratings yet
- Self-Calibration of A Moving Camera From Point Correspondences and Fundamental MatricesDocument36 pagesSelf-Calibration of A Moving Camera From Point Correspondences and Fundamental MatricesBrianChenNo ratings yet
- Motion of An Uncalibrated Stereo Rig Self-Calibration and Metric ReconstructionDocument11 pagesMotion of An Uncalibrated Stereo Rig Self-Calibration and Metric ReconstructionfmannanNo ratings yet
- Two-Stage Segmentation For Detection of Suspicious Objects in Aerial and Long-Range Surveillance ApplicationsDocument5 pagesTwo-Stage Segmentation For Detection of Suspicious Objects in Aerial and Long-Range Surveillance Applicationshrvoje80No ratings yet
- 10 30897-Ijegeo 300724-287071Document8 pages10 30897-Ijegeo 300724-287071Albert KuriaNo ratings yet
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 pagesA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingVishalParekhNo ratings yet
- Basic Principles of PhotogrammetryDocument72 pagesBasic Principles of PhotogrammetryMehmet YILMAZNo ratings yet
- Base PaperDocument6 pagesBase Paperwa5jeedNo ratings yet
- Photogrammetric ConceptsDocument48 pagesPhotogrammetric Conceptsthereals.contactNo ratings yet
- Global Localization Using Local Pole PatternsDocument10 pagesGlobal Localization Using Local Pole Patternsvictor calan ucNo ratings yet
- Assignment 1 - AP2205A - Ausa Ramadhan Agustawijaya - 2021653296Document6 pagesAssignment 1 - AP2205A - Ausa Ramadhan Agustawijaya - 2021653296Ausa RamadhanNo ratings yet
- Adaptive Precision Geolocation Algorithm With Multiple Model UncertaintiesDocument15 pagesAdaptive Precision Geolocation Algorithm With Multiple Model Uncertaintieskj185No ratings yet
- TMCE08 Ind Env Rev EngDocument14 pagesTMCE08 Ind Env Rev EngAnonymous zwSP5gvNo ratings yet
- Constrained Optimization in Seismic Reflection Tomography: A Gauss-Newton Augmented Lagrangian ApproachDocument15 pagesConstrained Optimization in Seismic Reflection Tomography: A Gauss-Newton Augmented Lagrangian ApproachIfan AzizNo ratings yet
- Schott, Salvaggio, Volchok - 1988 - Schott_1988Document17 pagesSchott, Salvaggio, Volchok - 1988 - Schott_1988babylanonNo ratings yet
- Assessment of Geometric Accuracy of VHR Satellite Images: Commision I, WG I/2Document5 pagesAssessment of Geometric Accuracy of VHR Satellite Images: Commision I, WG I/2Kobalt von KriegerischbergNo ratings yet
- From Analogue To Digital Close-Range PhotogrammetryDocument9 pagesFrom Analogue To Digital Close-Range PhotogrammetryRohit KumarNo ratings yet
- The Mcminnville Pictures: (Antoine Cousyn, François Louange and Geoff Quick)Document33 pagesThe Mcminnville Pictures: (Antoine Cousyn, François Louange and Geoff Quick)edicioneshalbraneNo ratings yet
- Genetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationDocument23 pagesGenetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationhenrydclNo ratings yet
- Automatic Lineament Detection Using Digital ElevatDocument7 pagesAutomatic Lineament Detection Using Digital ElevatKarim MegherfiNo ratings yet
- Close Range Digital Photogrammetry Applied To Topography and Landslide MeasurementsDocument6 pagesClose Range Digital Photogrammetry Applied To Topography and Landslide Measurementsugo_rossiNo ratings yet
- An Improvement of GPS Height Estimations: Stochastic ModelingDocument8 pagesAn Improvement of GPS Height Estimations: Stochastic ModelingThanate JongrujinanNo ratings yet
- C D Gps D P T M R S E: Omparing Ifferent ATA RocessingDocument21 pagesC D Gps D P T M R S E: Omparing Ifferent ATA RocessingGisell Vanessa Gamboa SandovalNo ratings yet
- Geometric Wavelet Transform For Optical Flow Estimation AlgorithmDocument8 pagesGeometric Wavelet Transform For Optical Flow Estimation Algorithmijcga100% (1)
- Aerial Triangulation: Report TitleDocument18 pagesAerial Triangulation: Report TitleMominRashadNo ratings yet
- Augmented Reality Research PaperDocument10 pagesAugmented Reality Research Paperrahulkhanna723No ratings yet
- 240 Spatial 2 PDFDocument6 pages240 Spatial 2 PDFKobalt von KriegerischbergNo ratings yet
- Toward Higher Automation and Flexibility in Commercial Digital Photogrammetric SystemDocument3 pagesToward Higher Automation and Flexibility in Commercial Digital Photogrammetric SystemKobalt von KriegerischbergNo ratings yet
- 216 Spatial 2 PDFDocument3 pages216 Spatial 2 PDFKobalt von KriegerischbergNo ratings yet
- 202 7 Arqueo PDFDocument6 pages202 7 Arqueo PDFKobalt von KriegerischbergNo ratings yet
- Exterior Orientation For Remote Sensing Image With High Resolution by Linear FeatureDocument4 pagesExterior Orientation For Remote Sensing Image With High Resolution by Linear FeatureKobalt von KriegerischbergNo ratings yet
- RS-techniques For Land Use Change Detection - Case Study of IstanbulDocument6 pagesRS-techniques For Land Use Change Detection - Case Study of IstanbulKobalt von KriegerischbergNo ratings yet
- Automatic Change Detection For Validation of Digital Map DatabasesDocument6 pagesAutomatic Change Detection For Validation of Digital Map DatabasesKobalt von KriegerischbergNo ratings yet
- Gps/Ins Systems For Compilation of Digital Large-Scale OrthophotosDocument6 pagesGps/Ins Systems For Compilation of Digital Large-Scale OrthophotosKobalt von KriegerischbergNo ratings yet
- Strategies For Updating A National 3-D Topographic Database and Related GeoinformationDocument6 pagesStrategies For Updating A National 3-D Topographic Database and Related GeoinformationKobalt von KriegerischbergNo ratings yet
- 097 Software PDFDocument12 pages097 Software PDFKobalt von KriegerischbergNo ratings yet
- 177 7 PDFDocument5 pages177 7 PDFKobalt von KriegerischbergNo ratings yet
- Accuracy of DTM Generated From Spot 4 and Spot 5 Hrs Data: Commission IV, WG IV/6Document5 pagesAccuracy of DTM Generated From Spot 4 and Spot 5 Hrs Data: Commission IV, WG IV/6Kobalt von KriegerischbergNo ratings yet
- 086 7 PDFDocument5 pages086 7 PDFKobalt von KriegerischbergNo ratings yet
- FlinkDocument31 pagesFlinksayhi2sudarshanNo ratings yet
- Ibm AixDocument10 pagesIbm AixAsem Youssef Abdel SalamNo ratings yet
- Computer Processing TechniquesDocument25 pagesComputer Processing Techniqueskomal4242No ratings yet
- Primary and Foreign Keys Laboratory Exercise #3 From Houston, TexasDocument11 pagesPrimary and Foreign Keys Laboratory Exercise #3 From Houston, TexasDavid Lance Aguinaldo100% (1)
- En NetApp FAS8000 SeriesDocument4 pagesEn NetApp FAS8000 SeriesTĩnh PkNo ratings yet
- 9.binary Search Tree - Set 1 (Search and Insertion) : Searching A KeyDocument11 pages9.binary Search Tree - Set 1 (Search and Insertion) : Searching A KeyAnand DuraiswamyNo ratings yet
- Differences Between M2PA and M2UADocument2 pagesDifferences Between M2PA and M2UAmnyama_mnyamaNo ratings yet
- Bsod 1 - 50Document59 pagesBsod 1 - 50SlobaBgd0% (1)
- Test 1. Multiple ChoiceDocument3 pagesTest 1. Multiple ChoiceMariz Rabino ReginaldoNo ratings yet
- Java - All in One (FAQs)Document138 pagesJava - All in One (FAQs)api-3728136No ratings yet
- Multidimensional Data Modeling in PentahoDocument6 pagesMultidimensional Data Modeling in Pentahothamasi kandiNo ratings yet
- User Guide For COFEE v112Document46 pagesUser Guide For COFEE v112DrWeirdOne100% (2)
- Network Models - Operations ResearchDocument11 pagesNetwork Models - Operations Researchneerubanda100% (1)
- Bca Question Papers Blue PrintDocument11 pagesBca Question Papers Blue PrintPoxitee Pox60% (5)
- Solution of Algebraic and Transcendental Equation Using Bisection MethodDocument7 pagesSolution of Algebraic and Transcendental Equation Using Bisection MethodSubhranil SarkarNo ratings yet
- William Stallings Computer Organization and Architecture 8 EditionDocument55 pagesWilliam Stallings Computer Organization and Architecture 8 EditionflowrentsiaNo ratings yet
- Python For Architects 1Document57 pagesPython For Architects 1Iyamperumal MurugesanNo ratings yet
- Basis Interview QuestionsDocument7 pagesBasis Interview QuestionsBreeZe GotJuiceNo ratings yet
- Help RNC CommandDocument7 pagesHelp RNC CommandMular Abdul ShukoorNo ratings yet
- Sap Basis TcodesDocument3 pagesSap Basis TcodesRockRahilNo ratings yet
- Software Cost EstimationDocument58 pagesSoftware Cost EstimationMmNo ratings yet
- Storage FundamentalsDocument34 pagesStorage Fundamentalsdeepeshkumarpal5194No ratings yet
- Activity Creating A Matrix Report PDFDocument3 pagesActivity Creating A Matrix Report PDFRadnumNo ratings yet
- Referencia DerbyDocument340 pagesReferencia DerbycorncakesNo ratings yet
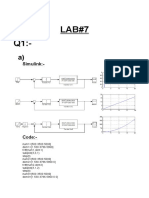
- LAB#7 Q1:-: SimulinkDocument3 pagesLAB#7 Q1:-: SimulinkmoiedNo ratings yet
- Check and Validate Input Field When Loses Focus, With PHP Via AjaxDocument4 pagesCheck and Validate Input Field When Loses Focus, With PHP Via AjaxMarPloNo ratings yet
- LSMW For Assigning Characteristics Profile To Merchandise CategoriesDocument31 pagesLSMW For Assigning Characteristics Profile To Merchandise CategoriesBipin ShuklaNo ratings yet
- SAP ABAP Scripts Interview Questions and Answers PDFDocument6 pagesSAP ABAP Scripts Interview Questions and Answers PDFRadha SheelaNo ratings yet