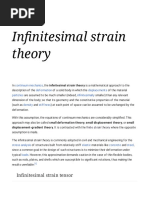
Geometric Derivation of The Infinitesimal Strain Tensor
Geometric Derivation of The Infinitesimal Strain Tensor
Download as doc, pdf, or txt
You might also like
- Air Conditioner NissanDocument34 pagesAir Conditioner NissanFrederikusNo ratings yet
- Storage and Flow of Solids - Jenike A.W PDFDocument322 pagesStorage and Flow of Solids - Jenike A.W PDFGeorge Markas100% (1)
- Introduction LetterDocument7 pagesIntroduction LetterRavi Sharma100% (1)
- Infinitesimal Strain TensorDocument16 pagesInfinitesimal Strain Tensoralokesh1982No ratings yet
- Infinitesimal Strain TheoryDocument16 pagesInfinitesimal Strain Theoryalokesh1982No ratings yet
- Lab. 3 Rotational Motion: Most Fundamental Concepts Are Substracted From The Web SiteDocument20 pagesLab. 3 Rotational Motion: Most Fundamental Concepts Are Substracted From The Web SiteTesfaye BelayeNo ratings yet
- Geometrical Anatomy and Anatomical MovementsDocument27 pagesGeometrical Anatomy and Anatomical Movementsdenmwa2030ceNo ratings yet
- Infinitesimal Strain Theory - WikipediaDocument18 pagesInfinitesimal Strain Theory - Wikipediaismail adeizaNo ratings yet
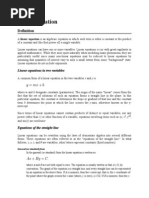
- Linear EquationDocument12 pagesLinear EquationaassmmrrNo ratings yet
- Chapter 3: Basic Concepts and Definitions 3.1basic DefinitionsDocument25 pagesChapter 3: Basic Concepts and Definitions 3.1basic Definitionsram_shyam2621No ratings yet
- Fundamentals of Structural Geology Exercise: Concepts From Chapter 10Document5 pagesFundamentals of Structural Geology Exercise: Concepts From Chapter 10firstdawn02No ratings yet
- Smith 1Document14 pagesSmith 1Mikee MeladNo ratings yet
- B. Inversely As The Square ofDocument6 pagesB. Inversely As The Square ofcielo_cetd367067% (3)
- Mechanical KOM Sem3Document43 pagesMechanical KOM Sem3Thiyagu SundaramNo ratings yet
- Mechanics of MaterialsDocument23 pagesMechanics of MaterialsEmily EdwardsNo ratings yet
- ME311 061 Chapter6Document6 pagesME311 061 Chapter6AhmedAliNo ratings yet
- Coning Angle Forward FlightDocument3 pagesConing Angle Forward FlightmanitheaerialfighterNo ratings yet
- Mathematics Statistical Square Root Mean SquaresDocument5 pagesMathematics Statistical Square Root Mean SquaresLaura TaritaNo ratings yet
- Diagnostic /remedial Test 06 Velocity and Acceleration: WWW - Physics.monash - Edu.au/communityDocument30 pagesDiagnostic /remedial Test 06 Velocity and Acceleration: WWW - Physics.monash - Edu.au/communityTama RizNo ratings yet
- Influence Line Analysis of Bridges Using MATLAB: Saleh I. AldeghaitherDocument14 pagesInfluence Line Analysis of Bridges Using MATLAB: Saleh I. AldeghaitherSilver Olguín CamachoNo ratings yet
- Octupus ManualDocument56 pagesOctupus ManualVasil YordanovNo ratings yet
- Correlation Between Observed Support Pressure and Rock Mass QualityDocument21 pagesCorrelation Between Observed Support Pressure and Rock Mass QualityhiimrujuNo ratings yet
- SPM Add Maths Formula List Form5Document28 pagesSPM Add Maths Formula List Form5Sayantani GhoshNo ratings yet
- Question Bank For Mid Sem ExamDocument14 pagesQuestion Bank For Mid Sem ExamNishant B MayekarNo ratings yet
- GD and TDocument4 pagesGD and Tchuahuipeng100% (1)
- Jameela Khatoon, T. H. Somashekar, Y. C. Radhalakshmi and Arindam BasuDocument14 pagesJameela Khatoon, T. H. Somashekar, Y. C. Radhalakshmi and Arindam BasuHamid MovahedNo ratings yet
- Mathematical FormulaDocument6 pagesMathematical Formulasayhigaurav07No ratings yet
- Exp. 6, Theory Rigid Body EquilibriumDocument4 pagesExp. 6, Theory Rigid Body Equilibriumdayangmyra100% (2)
- Ab Initio MethodsDocument19 pagesAb Initio MethodsPrasad Uday BandodkarNo ratings yet
- Mechanics of MaterialsDocument23 pagesMechanics of MaterialsPatrick GibsonNo ratings yet
- Lecture 2: Introduction To Ordinary Differential EquationsDocument54 pagesLecture 2: Introduction To Ordinary Differential Equationsandre_furtado_1970No ratings yet
- Chapter 3-1Document34 pagesChapter 3-1Eng-Mohammed KayedNo ratings yet
- Nonconvergence in Caesar in Caesar IIDocument11 pagesNonconvergence in Caesar in Caesar IIviv0102No ratings yet
- Nonconvergence in Caesar IIDocument11 pagesNonconvergence in Caesar IIMichael RobinsonNo ratings yet
- Natural Frequencies of A Tapered Cantilever Beam of Constant Thickness and Linearly Tapered WidthDocument9 pagesNatural Frequencies of A Tapered Cantilever Beam of Constant Thickness and Linearly Tapered WidthAleksandar Nikolic100% (1)
- Unit IIDocument11 pagesUnit IIPiyush ChaturvediNo ratings yet
- C PP V: Chapter III. Part IV Vortex Solution, Flow Over A Lifting CylinderDocument4 pagesC PP V: Chapter III. Part IV Vortex Solution, Flow Over A Lifting CylindergetsweetNo ratings yet
- Chapter 8. Motion in A Noninertial Reference Frame: 8.1 Rotating Coordinate SystemsDocument13 pagesChapter 8. Motion in A Noninertial Reference Frame: 8.1 Rotating Coordinate SystemsqtmcNo ratings yet
- The Inertia of EnergyDocument12 pagesThe Inertia of EnergyEsteban WrightNo ratings yet
- Elastic Behavior of Materials: Continuum Aspects: 1. Deformation and StrainDocument7 pagesElastic Behavior of Materials: Continuum Aspects: 1. Deformation and StrainNawar TahaNo ratings yet
- Introduction and Review: PreambleDocument6 pagesIntroduction and Review: PreamblebhaskarrajusaNo ratings yet
- 01hookes LawDocument2 pages01hookes LawEdgar PascasioNo ratings yet
- Infinitesimal Strain TheoryDocument13 pagesInfinitesimal Strain Theoryrpraj3135No ratings yet
- LECTURE 2 - Fluid DynamicsDocument13 pagesLECTURE 2 - Fluid DynamicsBang AnuhNo ratings yet
- Topic 3Document8 pagesTopic 3Fakhrul Izzuddin RozaliNo ratings yet
- Homework Due Friday, 27 October: 21. A Fiber in An Infinit e MatrixDocument3 pagesHomework Due Friday, 27 October: 21. A Fiber in An Infinit e MatrixjjpkjkltNo ratings yet
- One Dimensional Equations1Document35 pagesOne Dimensional Equations1sivamadhaviyamNo ratings yet
- Kinema TicDocument13 pagesKinema Ticأحمد دعبسNo ratings yet
- Nonconvergence in Caesar II: Nonlinear RestraintsDocument11 pagesNonconvergence in Caesar II: Nonlinear RestraintsAshokkumar SRSNo ratings yet
- Viva QuestionsDocument3 pagesViva QuestionssandeshlikesNo ratings yet
- Power Electronics Harmonic Analysis - IgnatovaDocument18 pagesPower Electronics Harmonic Analysis - IgnatovaTalat TürkaslanNo ratings yet
- Advanced Structural BehaviorDocument6 pagesAdvanced Structural Behaviornedumaran.sNo ratings yet
- The Equation of Evolution of The Angular Momentum and The Instantaneous Axis of RotationDocument11 pagesThe Equation of Evolution of The Angular Momentum and The Instantaneous Axis of Rotationdann2207No ratings yet
- Lammps Detail CommandDocument15 pagesLammps Detail CommandSourav SahaNo ratings yet
- Construction Materials Notes.Document32 pagesConstruction Materials Notes.melakdesalegnNo ratings yet
- Exam 1 2013Document6 pagesExam 1 2013waratore1No ratings yet
- The Two-State System: Iet N NDocument9 pagesThe Two-State System: Iet N NSohaib AzamNo ratings yet
- Chapter Five: Transport of Particles: R J T NDocument15 pagesChapter Five: Transport of Particles: R J T NminhminhandNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Direct Linear Transformation: Practical Applications and Techniques in Computer VisionFrom EverandDirect Linear Transformation: Practical Applications and Techniques in Computer VisionNo ratings yet
- Quantum DerivesDocument1 pageQuantum Derivesalokesh1982No ratings yet
- SuperconductorsDocument1 pageSuperconductorsalokesh1982No ratings yet
- Wave Particle DualityDocument1 pageWave Particle Dualityalokesh1982No ratings yet
- Frequency: Is Considered The Father of The Quantum TheoryDocument1 pageFrequency: Is Considered The Father of The Quantum Theoryalokesh1982No ratings yet
- History of Quantum PhysicsDocument1 pageHistory of Quantum Physicsalokesh1982No ratings yet
- Passband Modulation: Modulation From Wikipedia, The Free Encyclopedia For Other Uses, SeeDocument3 pagesPassband Modulation: Modulation From Wikipedia, The Free Encyclopedia For Other Uses, Seealokesh1982No ratings yet
- Quantum Mechanics (QM Also Known As Quantum Physics or Quantum Theory), IncludingDocument1 pageQuantum Mechanics (QM Also Known As Quantum Physics or Quantum Theory), Includingalokesh1982No ratings yet
- Region of Convergence Example 2: Inverse Z-TransformDocument1 pageRegion of Convergence Example 2: Inverse Z-Transformalokesh1982No ratings yet
- OpticalDocument2 pagesOpticalalokesh1982No ratings yet
- Rabindranath TagoreDocument1 pageRabindranath Tagorealokesh1982No ratings yet
- History of Z TransformDocument1 pageHistory of Z Transformalokesh1982No ratings yet
- Magnets: Antiferromagnet. Magnetite (FeDocument1 pageMagnets: Antiferromagnet. Magnetite (Fealokesh1982No ratings yet
- Silicon, (Si) :the Most Common Semiconductor, Atomic Number 14Document1 pageSilicon, (Si) :the Most Common Semiconductor, Atomic Number 14alokesh1982No ratings yet
- 3.3.2 Ionized Impurity Scattering: Brooks51Document1 page3.3.2 Ionized Impurity Scattering: Brooks51alokesh1982No ratings yet
- One DimensionalDocument1 pageOne Dimensionalalokesh1982No ratings yet
- Multi Potential ScatteringDocument1 pageMulti Potential Scatteringalokesh1982No ratings yet
- Intervalley Phonon Scattering: Harrison56 Conwell67Document1 pageIntervalley Phonon Scattering: Harrison56 Conwell67alokesh1982No ratings yet
- Optical Intravalley Scattering: Harrison56Document1 pageOptical Intravalley Scattering: Harrison56alokesh1982No ratings yet
- Acoustic Intravalley Scattering at Low TemperaturesDocument1 pageAcoustic Intravalley Scattering at Low Temperaturesalokesh1982No ratings yet
- Evaluating Refrigeration SystemsDocument21 pagesEvaluating Refrigeration SystemsCesar BlNo ratings yet
- BS 6364 Vs BS ISO 28921Document5 pagesBS 6364 Vs BS ISO 28921Jyotirmoy KarmakarNo ratings yet
- Parts Code Parts NameDocument12 pagesParts Code Parts Namearif wicaksonoNo ratings yet
- Perrys TabsDocument10 pagesPerrys TabsCharles Amiel DionisioNo ratings yet
- Exercise II in EESDocument6 pagesExercise II in EESricardo castroNo ratings yet
- Poster sgt6 5000f SeriesDocument1 pagePoster sgt6 5000f SeriesHmed Ben MohamedNo ratings yet
- Aerody MidtermDocument14 pagesAerody MidtermLady Divine LapitanNo ratings yet
- Valve Test & Repair Equipment: Catalogue 2018Document68 pagesValve Test & Repair Equipment: Catalogue 2018Kauffman LOKONo ratings yet
- Dsheet June22 Rev1Document45 pagesDsheet June22 Rev1KANWAR GILLNo ratings yet
- Assignment 3 Due:: May 07, 2020: Z Z Z ZDocument1 pageAssignment 3 Due:: May 07, 2020: Z Z Z ZwatsopNo ratings yet
- Graph For Ronel2.0Document3 pagesGraph For Ronel2.0Ronel AlbanNo ratings yet
- SPM Controls: Cell No.Document16 pagesSPM Controls: Cell No.booNo ratings yet
- Aws D14.7-2005Document68 pagesAws D14.7-2005iqbalNo ratings yet
- Nacelle Design and SizingDocument34 pagesNacelle Design and SizingSandeep BandyopadhyayNo ratings yet
- C V DR Mohamed HassanDocument6 pagesC V DR Mohamed Hassanapi-247334015No ratings yet
- 1996 Nissan QuestDocument235 pages1996 Nissan Questvicthor74No ratings yet
- EN15242 Ventilation Calculation Air Flow RatesDocument52 pagesEN15242 Ventilation Calculation Air Flow RatesBrandon LowNo ratings yet
- 1 Service ManualDocument486 pages1 Service ManualАлександрNo ratings yet
- HDG Datasheet 14 - Masking and Prevention of Hot Dip Galvanized CoatingDocument1 pageHDG Datasheet 14 - Masking and Prevention of Hot Dip Galvanized CoatingSam SamuelsonNo ratings yet
- 3 Series: Centrifugal Pumps Construction 50HzDocument2 pages3 Series: Centrifugal Pumps Construction 50HzocnogueiraNo ratings yet
- New Design SheetDocument16 pagesNew Design SheetAnonymous ROHiipW9pNo ratings yet
- Educational System: Physics - IDocument2 pagesEducational System: Physics - IHCCS FoundationNo ratings yet
- Module 6 (Materials & Hardware) SubModule 6.2 (Aircraft Mat PDFDocument13 pagesModule 6 (Materials & Hardware) SubModule 6.2 (Aircraft Mat PDFJunaid YounusNo ratings yet
- Tensile PropertiesDocument4 pagesTensile Propertiesjontylee87No ratings yet
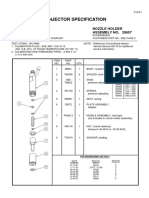
- Injector Specification: Nozzle Holder Assembly No. 28657Document2 pagesInjector Specification: Nozzle Holder Assembly No. 28657Ventas DamNo ratings yet
- Kemppi Minarc-Evo-180 en US PDFDocument2 pagesKemppi Minarc-Evo-180 en US PDFIonel ȘearpeNo ratings yet
- Laboratory Manual: II Year B. Tech I-Semester Mechanical EngineeringDocument45 pagesLaboratory Manual: II Year B. Tech I-Semester Mechanical Engineeringmuhammad ahsanNo ratings yet