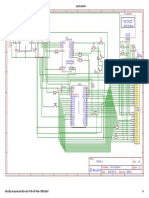
Datasheet Arduino Mega 2560
Datasheet Arduino Mega 2560
Download as docx, pdf, or txt
You might also like
- Complete List of ADB Commands With ExamplesDocument6 pagesComplete List of ADB Commands With Examples369iamqp100% (1)
- Hytera HP78X Uv&VHF Service Manual V01 - EngDocument217 pagesHytera HP78X Uv&VHF Service Manual V01 - EngHytera MNC580100% (1)
- AMD Graphics Tool (AGT) User's Guide: AMD Confidential - Advance InformationDocument23 pagesAMD Graphics Tool (AGT) User's Guide: AMD Confidential - Advance Informationbravodesign100% (1)
- Akai Service ManualDocument74 pagesAkai Service ManualDa_costaNo ratings yet
- EPSON ProSix PS3Document2 pagesEPSON ProSix PS3maciasrobNo ratings yet
- Microchip dsPIC30F2020 SMPS DatasheetDocument286 pagesMicrochip dsPIC30F2020 SMPS DatasheetMarlon MoscosoNo ratings yet
- Sentro8 - Modbus - Registers #1 10Document24 pagesSentro8 - Modbus - Registers #1 10Rodrigo RestrepoNo ratings yet
- Online TC Generation DocumentationDocument15 pagesOnline TC Generation Documentationravi kumar100% (1)
- E-Series Service Manual enDocument213 pagesE-Series Service Manual enVeeroos VeeroosNo ratings yet
- Kuka Robots (Mission Statement)Document3 pagesKuka Robots (Mission Statement)MohamedNihasNo ratings yet
- Magnetically Levitated BallDocument4 pagesMagnetically Levitated BallthaisubNo ratings yet
- ST7735Document167 pagesST7735jatonfireNo ratings yet
- Introduction To Pic 16F877ADocument37 pagesIntroduction To Pic 16F877AAbdul Muqeet Ahmed KhanNo ratings yet
- DsPIC Getting Started GuideDocument79 pagesDsPIC Getting Started Guideapi-3722969100% (7)
- 2011 Panasonic FHD Plasma TV Technical GuideDocument114 pages2011 Panasonic FHD Plasma TV Technical Guidermeyers550% (2)
- 07 - Chapter 3Document58 pages07 - Chapter 3Chibueze EzeokaforNo ratings yet
- Xilinx PresentationDocument35 pagesXilinx Presentationtrue0soul100% (1)
- Nais PLC Fp2Document39 pagesNais PLC Fp2hieutran86No ratings yet
- MPLAB User Guide 51519cDocument360 pagesMPLAB User Guide 51519cMgc Elektronik100% (2)
- PCB Design Master Training - CRDocument295 pagesPCB Design Master Training - CRNicu GeeNo ratings yet
- HC 05 BluetoothDocument5 pagesHC 05 BluetoothCrispNo ratings yet
- Esp32 Devkit v1Document1 pageEsp32 Devkit v1Professor RASIA100% (1)
- Get MicroPython Programming with ESP32 and ESP8266 Rui Santos free all chaptersDocument55 pagesGet MicroPython Programming with ESP32 and ESP8266 Rui Santos free all chaptersfrigasatink9100% (1)
- Padslogic UserDocument1,012 pagesPadslogic Userruinam_engineeringNo ratings yet
- HiPath 3000 5000 V6.0 Getting StartedDocument58 pagesHiPath 3000 5000 V6.0 Getting Startedsorin birou100% (1)
- LY IR 6000 V.1 BGA Rework Station: Can Be Connected To A Computer It Can Easily Rework The Variety of CPU's SeatDocument7 pagesLY IR 6000 V.1 BGA Rework Station: Can Be Connected To A Computer It Can Easily Rework The Variety of CPU's SeatMuhammad MajidNo ratings yet
- PIC16F877ADocument5 pagesPIC16F877AHari RamNo ratings yet
- BIOS Disassembly Ninjutsu Uncovered - PrefaceDocument5 pagesBIOS Disassembly Ninjutsu Uncovered - PrefaceRodrigo RochaNo ratings yet
- Service Manual Acer Aspire 5050 3050 SeriesDocument153 pagesService Manual Acer Aspire 5050 3050 SeriesSoporte Tecnico Buenos Aires100% (1)
- Simple, Real-Time Obstacle Avoidance Algorithm For Mobile RobotsDocument6 pagesSimple, Real-Time Obstacle Avoidance Algorithm For Mobile RobotsStefania MihaiNo ratings yet
- Inspiron 13 5000: 2-In-1 Service ManualDocument90 pagesInspiron 13 5000: 2-In-1 Service ManualStarrx714No ratings yet
- PLC Lader LogicDocument53 pagesPLC Lader LogicKamaraju DaviliNo ratings yet
- Powtran PI9000-SDocument105 pagesPowtran PI9000-SOggie Kent Castillo100% (1)
- Test Fixture Design GuidelinesDocument20 pagesTest Fixture Design Guidelinesabi raja100% (1)
- T5L - DGUSII Application Development GuideDocument81 pagesT5L - DGUSII Application Development GuidetnenNo ratings yet
- JTAG SecurityDocument4 pagesJTAG SecurityrhddevNo ratings yet
- LVDS Connector 30 PIN CompositeDocument2 pagesLVDS Connector 30 PIN CompositebingolahNo ratings yet
- 3ADW000194R0506 DCS800 - Hardware Manual - Es - e PDFDocument124 pages3ADW000194R0506 DCS800 - Hardware Manual - Es - e PDFAlfonso SanchezNo ratings yet
- KUKA KR 360-3 (Six-Axis Industrial Robot For Wheel Assembly System)Document21 pagesKUKA KR 360-3 (Six-Axis Industrial Robot For Wheel Assembly System)thanh_cdt01No ratings yet
- ArduinoDocument60 pagesArduinoMonark HunyNo ratings yet
- UM1690 User Manual: Discovery Kit For STM32 F0 Series With STM32F072RB MCUDocument31 pagesUM1690 User Manual: Discovery Kit For STM32 F0 Series With STM32F072RB MCUAbraham GutierrezNo ratings yet
- Uninterruptible Power Supply Reference Design With A PIC-Www - CircuitdiagramDocument60 pagesUninterruptible Power Supply Reference Design With A PIC-Www - Circuitdiagramirfan_ghani100% (1)
- HC-SR04 Ultrasonic Sensor On An Atmel ATtiny13 at PDFDocument8 pagesHC-SR04 Ultrasonic Sensor On An Atmel ATtiny13 at PDFDr MukeshNo ratings yet
- STM32 Nucleo-64 BoardsDocument66 pagesSTM32 Nucleo-64 BoardsFaggotNo ratings yet
- STM32 F4 Series - High-Performance Cortex-M4 MCU - Brstm32f4Document14 pagesSTM32 F4 Series - High-Performance Cortex-M4 MCU - Brstm32f4test5001No ratings yet
- Kuka RobotsDocument6 pagesKuka Robotssundarspace0% (1)
- NRF 24 L 01Document13 pagesNRF 24 L 01Truong Sinh NguyenNo ratings yet
- 5 - HyperLynx E1 PDFDocument45 pages5 - HyperLynx E1 PDFabdallah meziti-proNo ratings yet
- Esp32 Datasheet enDocument43 pagesEsp32 Datasheet enRenato HernandezNo ratings yet
- Hyperlynx Thermal User Manual: Software Version 9.0.1Document106 pagesHyperlynx Thermal User Manual: Software Version 9.0.1nrupavesh nNo ratings yet
- Basics How To Design Fabricate A PCB Using EAGLE PDFDocument10 pagesBasics How To Design Fabricate A PCB Using EAGLE PDFGheorghe EneNo ratings yet
- A Project Report On Wireless Doorbell WiDocument39 pagesA Project Report On Wireless Doorbell WiVivek AdawadeNo ratings yet
- 5 PDFDocument120 pages5 PDFSenad Cavkusic100% (1)
- Manual de Utilização FBs IDocument380 pagesManual de Utilização FBs IstgpereiraNo ratings yet
- C What Happens EbookDocument192 pagesC What Happens EbookIzhar Rosli100% (1)
- Stateflow Users GuideDocument652 pagesStateflow Users Guidedarkm4nNo ratings yet
- Panasonic MINAS A5Document478 pagesPanasonic MINAS A5Vaikuntam Ramamurthy100% (1)
- Arduino Board Mega 2560Document5 pagesArduino Board Mega 2560BARUN BIKASH DENo ratings yet
- Arduino Mega 2560Document6 pagesArduino Mega 2560Alex PortilloNo ratings yet
- Arduino Mega 2560Document5 pagesArduino Mega 2560sivasankarchenna_014No ratings yet
- Arduino Mega 2560 ICSP - DFUDocument4 pagesArduino Mega 2560 ICSP - DFUxem3No ratings yet
- Arduino Mega DescriptionDocument7 pagesArduino Mega DescriptionCristi ShkeopuNo ratings yet
- File VIII (Lampiran)Document38 pagesFile VIII (Lampiran)Razort EnemyNo ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Question Submitted AnswersDocument12 pagesQuestion Submitted AnswersMohammad HasanNo ratings yet
- Question Bank UNIT IDocument11 pagesQuestion Bank UNIT IVISHNUKUMARNo ratings yet
- OsTicket WINstallDocument25 pagesOsTicket WINstallMatt AndersonNo ratings yet
- WinPower Manual PDFDocument60 pagesWinPower Manual PDFanon_664354390No ratings yet
- 1st Unit Test in Computer 7Document2 pages1st Unit Test in Computer 7Pria VillalobosNo ratings yet
- LogDocument3 pagesLogrida yasinNo ratings yet
- ChordanaPlay Manual enDocument16 pagesChordanaPlay Manual enVictor Santana GomezNo ratings yet
- How To Use Adplus To Troubleshoot "Hangs" and "Crashes": System RequirementsDocument8 pagesHow To Use Adplus To Troubleshoot "Hangs" and "Crashes": System RequirementsajsinglaNo ratings yet
- Configuration Management ToolsDocument19 pagesConfiguration Management Toolsuic 18mca8012No ratings yet
- Test Process and AteDocument43 pagesTest Process and Ateapi-78343547No ratings yet
- Product Bulletin: February 2015 PB1412Document6 pagesProduct Bulletin: February 2015 PB1412Sudharshan SNo ratings yet
- Dell Emc Vxrail Planning Guide For Virtual San Stretched ClusterDocument8 pagesDell Emc Vxrail Planning Guide For Virtual San Stretched Clusterwira putroNo ratings yet
- NoSQL TutorialDocument12 pagesNoSQL TutorialOmar CubaNo ratings yet
- Resume (Himanshu Sharma)Document1 pageResume (Himanshu Sharma)Himanshu SharmaNo ratings yet
- Insight 30Document4 pagesInsight 30Esraa ShurrabNo ratings yet
- Manual_SeqStudio Genetic Analyzer Instrument and Software User GuideDocument268 pagesManual_SeqStudio Genetic Analyzer Instrument and Software User GuideAmanda MunizNo ratings yet
- Captura de Pantalla 2023-12-08 A La(s) 5.49.27 P.M.Document16 pagesCaptura de Pantalla 2023-12-08 A La(s) 5.49.27 P.M.Isaac SantosNo ratings yet
- User Interface Checklist UI - 1: Look & Feel: # Item Description Checked?Document24 pagesUser Interface Checklist UI - 1: Look & Feel: # Item Description Checked?Amani MuhtasebNo ratings yet
- Softice Tutorial From Mexelite Cracking GroupDocument10 pagesSoftice Tutorial From Mexelite Cracking Groupjaquel.kenithNo ratings yet
- Tutorial On Parallel Port InterfacingDocument7 pagesTutorial On Parallel Port InterfacingVasilis TsekourasNo ratings yet
- Two Step Verification FAQDocument8 pagesTwo Step Verification FAQChirag ShahNo ratings yet
- PRE 5 IT AUDIT Prelim Exam Answer KeyDocument3 pagesPRE 5 IT AUDIT Prelim Exam Answer KeyReymark GalasinaoNo ratings yet
- Lesson Ten: Introduction To ProgrammingDocument75 pagesLesson Ten: Introduction To ProgrammingEric Leo AsiamahNo ratings yet
- M5A78L-M PLUS-USB3 Devices ReportDocument21 pagesM5A78L-M PLUS-USB3 Devices ReportDante MoretaNo ratings yet
- Openshot 3.1 Released With Several Feature EnhancementsDocument1 pageOpenshot 3.1 Released With Several Feature EnhancementsalfeusmartiusNo ratings yet
- Caratteristice Asus Fx504geDocument15 pagesCaratteristice Asus Fx504geLeo LonardelliNo ratings yet