0% found this document useful (0 votes)
427 viewsDynamic Analysis Using FEM
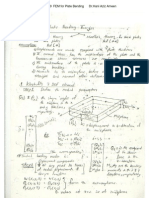
This document provides an overview of using finite element methods for seismic and dynamic analysis. It begins with a review of single and multi-degree of freedom systems and their governing equations of motion. It then discusses modeling methods for seismic ground motions, including response spectra. The document reviews analytical mechanics concepts like Lagrange's equations. It provides examples of applying these concepts to develop element equations for a vibrating beam. Finally, it summarizes the finite element method process for static and dynamic load cases, including determining element stiffness, mass and damping matrices to assemble the system equations of motion.
Uploaded by
B S Praveen BspCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
427 viewsDynamic Analysis Using FEM
This document provides an overview of using finite element methods for seismic and dynamic analysis. It begins with a review of single and multi-degree of freedom systems and their governing equations of motion. It then discusses modeling methods for seismic ground motions, including response spectra. The document reviews analytical mechanics concepts like Lagrange's equations. It provides examples of applying these concepts to develop element equations for a vibrating beam. Finally, it summarizes the finite element method process for static and dynamic load cases, including determining element stiffness, mass and damping matrices to assemble the system equations of motion.
Uploaded by
B S Praveen BspCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 47