Mejor Project
Mejor Project
Download as docx, pdf, or txt
You might also like
- Seminar Report (Maglev Trains)Document19 pagesSeminar Report (Maglev Trains)Tejas KadamNo ratings yet
- Rbe Micro ProjectDocument6 pagesRbe Micro Projectsakshi pawarNo ratings yet
- Final Report PDFDocument26 pagesFinal Report PDFPriyam SamantaNo ratings yet
- Viki ProjectDocument31 pagesViki ProjectsingamNo ratings yet
- Temporary Foot - FullDocument6 pagesTemporary Foot - FullTJPRC PublicationsNo ratings yet
- Jabalpur Engineering College, Jabalpur (M.P.) : Automation of Level Crossing Using RfidDocument20 pagesJabalpur Engineering College, Jabalpur (M.P.) : Automation of Level Crossing Using RfidHarshit GahelotNo ratings yet
- A Technical Seminar Report On: Bachelor of Technology IN Electrical and Electronics EngineeringDocument8 pagesA Technical Seminar Report On: Bachelor of Technology IN Electrical and Electronics EngineeringYellaturi Siva Kishore ReddyNo ratings yet
- Project Report AmitDocument18 pagesProject Report AmittempmailforamitNo ratings yet
- Visvesvaraya Technological University: "High Speed TrainDocument21 pagesVisvesvaraya Technological University: "High Speed TrainAbhilash KNo ratings yet
- Railway Using Ir SensorDocument9 pagesRailway Using Ir SensorRanjith GowdaNo ratings yet
- Smart Railway Station 1Document18 pagesSmart Railway Station 1Dinesh RajputNo ratings yet
- SEMINAR REPT Final11Document23 pagesSEMINAR REPT Final11SUMITH K SNo ratings yet
- Automatic Railway Gate Crossing Control Using PLCDocument2 pagesAutomatic Railway Gate Crossing Control Using PLCSHAHID AFRIDINo ratings yet
- Seminar ReportDocument32 pagesSeminar Reportrs730472No ratings yet
- Automatic Railway SystemDocument5 pagesAutomatic Railway SystemTomu RomsonNo ratings yet
- Advanced Dynamic Charging For E-Car SystemDocument52 pagesAdvanced Dynamic Charging For E-Car SystemDurai RajaNo ratings yet
- 10.2478 - TTJ 2024 0006Document12 pages10.2478 - TTJ 2024 0006sethyankitaraniNo ratings yet
- Project ReportDocument31 pagesProject Reportanuron1605No ratings yet
- Automation of Railway GateDocument47 pagesAutomation of Railway GatebakshikamranaNo ratings yet
- Seminar ReportDocument28 pagesSeminar ReportMohamed Anwar K67% (3)
- Project Paper Maglev FinalDocument26 pagesProject Paper Maglev Finaljp2002sonuNo ratings yet
- Implementation of Automatic Railway Gate Controller: Minor OnDocument23 pagesImplementation of Automatic Railway Gate Controller: Minor OnTalha MudassarNo ratings yet
- 8, 43-48Document6 pages8, 43-48thiruNo ratings yet
- Literature ReviewDocument4 pagesLiterature ReviewRohit MehtaNo ratings yet
- Irjet Automatic Railway Track Crack DeteDocument9 pagesIrjet Automatic Railway Track Crack DeteFrancis FaustineNo ratings yet
- A Seminar On ACDDocument23 pagesA Seminar On ACDrock_00No ratings yet
- An Introduction To Train Management System OF Western RailwayDocument72 pagesAn Introduction To Train Management System OF Western RailwayJitendraKalerNo ratings yet
- A Review - Automatic Railway Gate Control System: Shubham Shrirao, Dinesh RojatkarDocument4 pagesA Review - Automatic Railway Gate Control System: Shubham Shrirao, Dinesh RojatkarJohnsonNo ratings yet
- Design Engineering ReportDocument17 pagesDesign Engineering ReportJJ STUDIO100% (1)
- Indian Railway Training For B.Tech (UPTU/GBTU/MTU/RGPV)Document42 pagesIndian Railway Training For B.Tech (UPTU/GBTU/MTU/RGPV)Manasvi Mehta50% (4)
- Automatic Railway Crossing System NewDocument58 pagesAutomatic Railway Crossing System NewNimesh PatelNo ratings yet
- Training ReportDocument53 pagesTraining ReportHarshita [ KumariNo ratings yet
- Automatic Railway Gate ControlDocument6 pagesAutomatic Railway Gate ControlRithesh VRNo ratings yet
- Training Report Signalling and Telecommunication WorkDocument46 pagesTraining Report Signalling and Telecommunication WorkEngineers SolutionNo ratings yet
- 3. introduction,Objective, Lit. Rev.,Mat. meth.,Res & Dis.,Con.& Fut.sco.,Ref.,App. A & App. B_1Document25 pages3. introduction,Objective, Lit. Rev.,Mat. meth.,Res & Dis.,Con.& Fut.sco.,Ref.,App. A & App. B_1priyanshu7.vaishakhiyarNo ratings yet
- In Computer Science and Engineering Submitted byDocument27 pagesIn Computer Science and Engineering Submitted bybalaya babuNo ratings yet
- Synopsis RailwayDocument8 pagesSynopsis RailwaySathwik HvNo ratings yet
- Electrical Locomotive and Traction Installation Rdso LucknowDocument35 pagesElectrical Locomotive and Traction Installation Rdso Lucknowanil patel100% (1)
- Visit Report On Pole Mounted Substation 2Document8 pagesVisit Report On Pole Mounted Substation 2sakshamvalagaddeNo ratings yet
- Indian Railway Report JitendraDocument22 pagesIndian Railway Report Jitendramkansara2004No ratings yet
- Summer TrainingDocument36 pagesSummer TrainingJose AlvarezNo ratings yet
- Automated Railway Crossing and Obstacle Detection: 1 Rahul Shetty 2 Priyanka Patel 3 Akansha Sampat 4 Shubham ShuklaDocument7 pagesAutomated Railway Crossing and Obstacle Detection: 1 Rahul Shetty 2 Priyanka Patel 3 Akansha Sampat 4 Shubham ShuklaPrince KansagraNo ratings yet
- Thilip Internship ReportDocument25 pagesThilip Internship Reportravisurya9629No ratings yet
- RepoDocument70 pagesReporepeatmanNo ratings yet
- A Survey Paper On Driverless Metro Train Ijariie9334Document5 pagesA Survey Paper On Driverless Metro Train Ijariie9334Amit deshpandeNo ratings yet
- Train Accident Prevention by Fault Track: Aurora'S Technological and Research InstituteDocument16 pagesTrain Accident Prevention by Fault Track: Aurora'S Technological and Research InstituteSandhya Sanvi100% (1)
- Selected Automatic-Railway-Gate-ControllerDocument53 pagesSelected Automatic-Railway-Gate-ControllerBelete GetachewNo ratings yet
- Sutting Train ProjectDocument5 pagesSutting Train ProjectNita KadamNo ratings yet
- Seminar Report SampleDocument41 pagesSeminar Report Samplechaturvediaayush625No ratings yet
- Ovearall Se ProjectDocument26 pagesOvearall Se Projectkatariakhil9No ratings yet
- Design and Fabrication of Railway GateDocument6 pagesDesign and Fabrication of Railway Gatesingam100% (1)
- Fault Detection On Power System in Transmisson LineDocument16 pagesFault Detection On Power System in Transmisson Linerakesg ranjan makantaNo ratings yet
- MTRCDocument10 pagesMTRCLalitha LalliNo ratings yet
- A ON Industrial Training IN: Bachelor of TechnologyDocument34 pagesA ON Industrial Training IN: Bachelor of TechnologyAbhay TomarNo ratings yet
- Majhar ReportDocument23 pagesMajhar ReportAkash TalekarNo ratings yet
- Final Year Project (FYP) Railway TracksDocument15 pagesFinal Year Project (FYP) Railway TracksAcidoxicNo ratings yet
- ECE Monorail System Report PDFDocument19 pagesECE Monorail System Report PDFsai charanNo ratings yet
- Kavach: Cab Signalling & Automatic Train Protection System for Digital RailwaysFrom EverandKavach: Cab Signalling & Automatic Train Protection System for Digital RailwaysNo ratings yet
- Transmission Lines in Digital and Analog Electronic Systems: Signal Integrity and CrosstalkFrom EverandTransmission Lines in Digital and Analog Electronic Systems: Signal Integrity and CrosstalkNo ratings yet
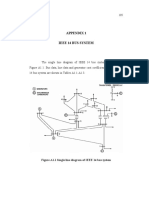
- 11 AppendixDocument48 pages11 AppendixVIKALP KULSHRESTHANo ratings yet
- Phase Locked Loop DesignDocument13 pagesPhase Locked Loop DesignVIKALP KULSHRESTHANo ratings yet
- WaveguidesDocument41 pagesWaveguidesVIKALP KULSHRESTHA80% (5)
- MatlabDocument176 pagesMatlabhonnamb100% (1)
- Satellite CommunicationsDocument743 pagesSatellite CommunicationsVIKALP KULSHRESTHA100% (5)
- Comm AnalogDocument29 pagesComm AnalogShaveen BeedasyNo ratings yet
- Asynchronous Transfer Mode (ATM)Document27 pagesAsynchronous Transfer Mode (ATM)VIKALP KULSHRESTHANo ratings yet
- Networking Methods: Local Area Network (LAN)Document4 pagesNetworking Methods: Local Area Network (LAN)VIKALP KULSHRESTHANo ratings yet
- Data Structure File MPCTDocument37 pagesData Structure File MPCTVIKALP KULSHRESTHANo ratings yet
- Fina Training ReportDocument36 pagesFina Training ReportVIKALP KULSHRESTHANo ratings yet
- Lanwan Network DevicesDocument3 pagesLanwan Network DevicesVIKALP KULSHRESTHANo ratings yet
- Hardware of ComputerDocument25 pagesHardware of ComputerVIKALP KULSHRESTHANo ratings yet
- Introduction To Isdn LineDocument3 pagesIntroduction To Isdn LineVIKALP KULSHRESTHANo ratings yet
- Hard Disk BasedDocument3 pagesHard Disk BasedVIKALP KULSHRESTHANo ratings yet
- Radar Fundamentals Power Point PresentationDocument51 pagesRadar Fundamentals Power Point PresentationVIKALP KULSHRESTHA100% (3)
- A Project Synopsis OnDocument11 pagesA Project Synopsis OnVIKALP KULSHRESTHA100% (2)
- Micro Strip BasicsDocument6 pagesMicro Strip BasicsshynusvNo ratings yet
- Practical File On Electronic-II: Submitted To Submitted byDocument16 pagesPractical File On Electronic-II: Submitted To Submitted byVIKALP KULSHRESTHANo ratings yet
- Power Point Presentation - Radar 04Document31 pagesPower Point Presentation - Radar 04VIKALP KULSHRESTHANo ratings yet
- BIOS Seminar PresentationDocument23 pagesBIOS Seminar PresentationVIKALP KULSHRESTHA67% (3)
- bq5105xB High-Efficiency Qi V1.1-Compliant Wireless Power Receiver and Battery ChargerDocument44 pagesbq5105xB High-Efficiency Qi V1.1-Compliant Wireless Power Receiver and Battery ChargerDamianNo ratings yet
- Repair Guideline For TCL DC Inverter Air ConditionerDocument40 pagesRepair Guideline For TCL DC Inverter Air Conditionerlucas rolanNo ratings yet
- CLS Aipmt-19-20 XII Phy Study-Package-6 Level-1 Chapter-14 PDFDocument24 pagesCLS Aipmt-19-20 XII Phy Study-Package-6 Level-1 Chapter-14 PDFMohammad Ashhar ImranNo ratings yet
- Installaton Manual For FPRA PDFDocument157 pagesInstallaton Manual For FPRA PDFernesto1981No ratings yet
- Dan Foss VLTDocument214 pagesDan Foss VLTVictor A DiazNo ratings yet
- Pending ListDocument3 pagesPending ListBalasubraNo ratings yet
- EDN Design Ideas 2004Document155 pagesEDN Design Ideas 2004chag1956100% (2)
- Tangent GalvanometerDocument19 pagesTangent GalvanometermerakiNo ratings yet
- Secure Data Transmission Between Two Pc's Using Zigbee Data TransmissionDocument59 pagesSecure Data Transmission Between Two Pc's Using Zigbee Data TransmissionAnand Cool100% (2)
- PFC Strategies in Light of en 61000-3-2Document9 pagesPFC Strategies in Light of en 61000-3-2allex_liuNo ratings yet
- Training Material For VMS-NSN Project Rev 0.2 20110906Document137 pagesTraining Material For VMS-NSN Project Rev 0.2 20110906Hieu TranNo ratings yet
- Cla 50 e 1200 HBDocument5 pagesCla 50 e 1200 HBmourad SysNo ratings yet
- BCU-02/12/22 Control Units: Hardware ManualDocument26 pagesBCU-02/12/22 Control Units: Hardware ManualSandeep Kr AryaNo ratings yet
- 2016 Summer Model Answer PaperDocument15 pages2016 Summer Model Answer Paper2251 EE MANMAT BIRADARNo ratings yet
- ACER Model 7299sl SvcManDocument80 pagesACER Model 7299sl SvcManAvr Electronica ChileNo ratings yet
- Controlled RectifiersDocument19 pagesControlled Rectifiersbalaji1986No ratings yet
- Cleaning RobotDocument29 pagesCleaning RobotGaus PatelNo ratings yet
- Introduction To Power Electronics (Benny Yeung)Document9 pagesIntroduction To Power Electronics (Benny Yeung)Souvik GanguliNo ratings yet
- R18 B.Tech Eee Iii YearDocument42 pagesR18 B.Tech Eee Iii YearNIMMANAGANTI RAMAKRISHNANo ratings yet
- 31762101449955Document97 pages31762101449955ibrahimNo ratings yet
- P.E 04 Controlled RectifiersDocument40 pagesP.E 04 Controlled RectifiersMuhammad Arslan YasinNo ratings yet
- PSD 2 MarkDocument30 pagesPSD 2 MarkKarthik KandellaNo ratings yet
- 20.3 ZXDU68 G020 (V5.0) Pole Cabinet - PDDocument8 pages20.3 ZXDU68 G020 (V5.0) Pole Cabinet - PDLuis Alfonso Lopez ArroyabeNo ratings yet
- CCTV Network & Functioning: The Power SupplyDocument28 pagesCCTV Network & Functioning: The Power SupplyGursam SinghNo ratings yet
- HF3 Adjustment InstructionDocument250 pagesHF3 Adjustment Instructionptnghiep100% (1)
- Full Wave Rectifier: ObjectiveDocument18 pagesFull Wave Rectifier: ObjectiveRajesh UpadhyayNo ratings yet
- M 500Document14 pagesM 500TabletaUnicaNo ratings yet
- 5.LDR Based Highways Road Light Failed Intimation Using GSMDocument44 pages5.LDR Based Highways Road Light Failed Intimation Using GSMfotronichs velloreNo ratings yet
- SAMS 101 Ways To Use Your Signal Generator 1959Document130 pagesSAMS 101 Ways To Use Your Signal Generator 1959Wasim KhanNo ratings yet
- Long Answer QuestionsDocument24 pagesLong Answer Questionsashok pradhanNo ratings yet