Olenin Georgy
Olenin Georgy
Download as pdf or txt
You might also like
- Forklift Project Report - 1Document43 pagesForklift Project Report - 1Anonymous bAj233Fs1e86% (49)
- Kone KDL Codes SenasDocument7 pagesKone KDL Codes SenasRomuald ZemlianskijNo ratings yet
- Commander Cargo Loader C15 ManualDocument752 pagesCommander Cargo Loader C15 ManualMarcos Muñoz100% (1)
- Design of Hydraulic Portable Crane Ijariie17796Document9 pagesDesign of Hydraulic Portable Crane Ijariie17796Diogo VidinhaNo ratings yet
- ANSI/ALI ALOIM-2000 Standard For Automotive Lifts: Safety Requirements For Operation, Inspection and MaintenanceDocument2 pagesANSI/ALI ALOIM-2000 Standard For Automotive Lifts: Safety Requirements For Operation, Inspection and MaintenanceAlfredo VSNo ratings yet
- Proiect Masa Ridicare PDFDocument41 pagesProiect Masa Ridicare PDFEpure GabrielNo ratings yet
- Design and Analysis of Hydraulic Scissor LiftDocument47 pagesDesign and Analysis of Hydraulic Scissor LiftAnkit Mandal100% (1)
- Nardos Haileslassie Pro 2Document7 pagesNardos Haileslassie Pro 2birhanubic23No ratings yet
- IJEDR1604052Document19 pagesIJEDR1604052AK productionsNo ratings yet
- Engineering Science Project ReportDocument15 pagesEngineering Science Project Reporthatini.ibrahimNo ratings yet
- Decision Factors in The Selection of Elevator: I-Manager's Journal On Mechanical Engineering May 2018Document11 pagesDecision Factors in The Selection of Elevator: I-Manager's Journal On Mechanical Engineering May 2018ManuKumarMittalNo ratings yet
- Engineering Machanics Micro ProjectDocument8 pagesEngineering Machanics Micro Projectpatilprem2719No ratings yet
- Design and Construction of A Hydraulically Powered Scissors LiftDocument61 pagesDesign and Construction of A Hydraulically Powered Scissors LiftJuan David Triana100% (2)
- Chapter 1: The Problem and A Review of Related Literature RationaleDocument30 pagesChapter 1: The Problem and A Review of Related Literature RationaleRuth MontebonNo ratings yet
- Addis Ababa Bole Internationa Airport InterpriseDocument21 pagesAddis Ababa Bole Internationa Airport Interprisegari100% (1)
- Fabrication of Hydraulic Scissor LiftDocument26 pagesFabrication of Hydraulic Scissor LiftShreyas BalsarafNo ratings yet
- Chapter 1 OlaDocument9 pagesChapter 1 Olagtfnthgv5fNo ratings yet
- Scientific discoveriesDocument17 pagesScientific discoveriesp.maheswariopenventioNo ratings yet
- Project MedardDocument18 pagesProject MedardAdibo FostinNo ratings yet
- THA077BME046 Reports On Hydraulic LiftsDocument7 pagesTHA077BME046 Reports On Hydraulic LiftsSujanNo ratings yet
- Chuanwen YinDocument36 pagesChuanwen YinKa KaNo ratings yet
- ProjectDocument23 pagesProjectdagi wondeNo ratings yet
- Literature Review of Hydraulic Scissor LiftDocument8 pagesLiterature Review of Hydraulic Scissor Liftea4c954q100% (1)
- High-Rise TowersDocument12 pagesHigh-Rise TowersRicardo AzocarNo ratings yet
- JETIR1902975Document6 pagesJETIR1902975simpi.kunalNo ratings yet
- Seminar YuDocument12 pagesSeminar Yugtfnthgv5fNo ratings yet
- Anhui Vocational and Technical College of Mining: Graduation Project (Thesis)Document27 pagesAnhui Vocational and Technical College of Mining: Graduation Project (Thesis)Anonymous ahdhFMaNo ratings yet
- Ijet16 08 01 085 PDFDocument11 pagesIjet16 08 01 085 PDFAmit GhadeNo ratings yet
- Design and Fabrication of Battery Operated Forklift: Journal Europã©En Des Systã Mes Automatisã©S January 2020Document7 pagesDesign and Fabrication of Battery Operated Forklift: Journal Europã©En Des Systã Mes Automatisã©S January 2020142 Sanjaykumar S RNo ratings yet
- Design and Fabrication of Hydraulic Scissor Lift: August 2015Document8 pagesDesign and Fabrication of Hydraulic Scissor Lift: August 2015Blessed OmonobiNo ratings yet
- NTR OductionDocument6 pagesNTR Oductionbirhanubic23No ratings yet
- 9.optimisation in Design of Mechanical Scissor LiftDocument5 pages9.optimisation in Design of Mechanical Scissor LiftAmit GhadeNo ratings yet
- Swing ArmDocument25 pagesSwing ArmJameel KhanNo ratings yet
- Hydraulic Lifter Jack ProjectDocument30 pagesHydraulic Lifter Jack Projectkatariaaaryan3No ratings yet
- Fem Project ReportDocument21 pagesFem Project ReportNisha SinghNo ratings yet
- Unit-II NotesDocument32 pagesUnit-II NotesMatina BajracharyaNo ratings yet
- Screw Jack Literature ReviewDocument8 pagesScrew Jack Literature Reviewc5q8g5tz50% (2)
- ABIDEM - Copy 2Document18 pagesABIDEM - Copy 2Abi DemNo ratings yet
- Scissor Lift TrolleyDocument3 pagesScissor Lift TrolleyMuhammad WaleedNo ratings yet
- Final Project ReportDocument14 pagesFinal Project ReportShailesh RathodNo ratings yet
- Design & Manufacturing of Wheelchair LifterDocument5 pagesDesign & Manufacturing of Wheelchair LifterVIVA-TECH IJRINo ratings yet
- Chapter-1: Design & Fabrication of Hydraulic Floor Crane 2014Document35 pagesChapter-1: Design & Fabrication of Hydraulic Floor Crane 2014Habtamu GeremewNo ratings yet
- Design and Fabrication of Hydraulic FlooDocument35 pagesDesign and Fabrication of Hydraulic FlooEric Rogers100% (1)
- Chapter-1: Design & Fabrication of Hydraulic Floor Crane 2014Document35 pagesChapter-1: Design & Fabrication of Hydraulic Floor Crane 2014Habtamu GeremewNo ratings yet
- Scissor LiftDocument27 pagesScissor LiftKalai100% (1)
- Design and Fabrication of Hydraulic Scissor Lift: August 2015Document8 pagesDesign and Fabrication of Hydraulic Scissor Lift: August 2015lalit PatilNo ratings yet
- Robotic End Effector Using 4-ReportDocument39 pagesRobotic End Effector Using 4-Reportkarthikds91100% (3)
- REMOTE CONTROLLED MOTORIZED JIB CRANE - NewDocument61 pagesREMOTE CONTROLLED MOTORIZED JIB CRANE - NewIYAPPAN ANo ratings yet
- Gearless Transmission NewDocument57 pagesGearless Transmission NewRajrohit KumarNo ratings yet
- Design and Fabrication of Battery Operated Forklift: Journal Europã©En Des Systã Mes Automatisã©S January 2020Document7 pagesDesign and Fabrication of Battery Operated Forklift: Journal Europã©En Des Systã Mes Automatisã©S January 2020Ho Van RoiNo ratings yet
- Multifunction Hand Truck: Project Design 1Document31 pagesMultifunction Hand Truck: Project Design 1Mary Bena DuhaylungsodNo ratings yet
- Mustafa S. Ali Design of Mechanism Assignment Step Stool Design (Workshop Convertible Step Stool)Document77 pagesMustafa S. Ali Design of Mechanism Assignment Step Stool Design (Workshop Convertible Step Stool)mustafa aliNo ratings yet
- Design and Fabrication of Hydraulic Scissor Lift: August 2015Document8 pagesDesign and Fabrication of Hydraulic Scissor Lift: August 2015SACHIN GOYAL034No ratings yet
- Chapter II TrolleyDocument5 pagesChapter II Trolley2003217No ratings yet
- Chapter 1 GoodboiDocument2 pagesChapter 1 GoodboiChristed Aljo BarrogaNo ratings yet
- LUKMAN MEMON 2018Document7 pagesLUKMAN MEMON 2018Karan SharmaNo ratings yet
- Design and Fabrication of Pneumatic Crane ReportDocument46 pagesDesign and Fabrication of Pneumatic Crane ReportHimani MahetaNo ratings yet
- Mecatronic SistemsDocument13 pagesMecatronic SistemsRadu CirimpeiNo ratings yet
- Chapter 2 Hydraulic JackDocument9 pagesChapter 2 Hydraulic JackAb An100% (1)
- Literature Review of Pneumatic Pick and Place RobotDocument5 pagesLiterature Review of Pneumatic Pick and Place Robotc5qx9hq5No ratings yet
- Practical Finite Element Simulations with SOLIDWORKS 2022: An illustrated guide to performing static analysis with SOLIDWORKS SimulationFrom EverandPractical Finite Element Simulations with SOLIDWORKS 2022: An illustrated guide to performing static analysis with SOLIDWORKS SimulationNo ratings yet
- Doosan Operation&MaintenanceManual SB2355E00 PDFDocument350 pagesDoosan Operation&MaintenanceManual SB2355E00 PDFSami Enis Arıoğlu100% (2)
- ESCALATORDocument25 pagesESCALATORVala Vraj M.No ratings yet
- Product Brochure - 2020Document60 pagesProduct Brochure - 2020Sufiyan KhanNo ratings yet
- Vol 5 Tech SpecsDocument417 pagesVol 5 Tech Specssanjay kumarNo ratings yet
- Planning Guide: 5W Qvo (WT) /QWV ( - Q/P (Inm/Azmtqijqtq/AivlmnnqkqmvkaDocument22 pagesPlanning Guide: 5W Qvo (WT) /QWV ( - Q/P (Inm/Azmtqijqtq/AivlmnnqkqmvkaMustafaNo ratings yet
- Sub: Work Order For Lift Installationwork at N.M.M.C. On Plot No.6, Sector-9, At-NerulDocument3 pagesSub: Work Order For Lift Installationwork at N.M.M.C. On Plot No.6, Sector-9, At-NerulSachin KorgaonkarNo ratings yet
- User Manual - Heraeus - Heracell 150 - Rev. D - 50075549 - D - EnglischDocument86 pagesUser Manual - Heraeus - Heracell 150 - Rev. D - 50075549 - D - Englischluroguita-1100% (4)
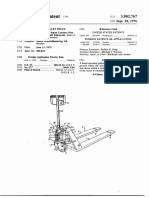
- US3982767Document6 pagesUS3982767takanobu ouraNo ratings yet
- 99730-86120 GC35K Omm 2013-05e1 CatDocument186 pages99730-86120 GC35K Omm 2013-05e1 CatLuis MirNo ratings yet
- KONE DX Signalization Modernization Brochure tcm90-97582Document4 pagesKONE DX Signalization Modernization Brochure tcm90-97582Trần Văn ThảoNo ratings yet
- Cat Motor Grader PDFDocument8 pagesCat Motor Grader PDFsumit panchwanNo ratings yet
- Checklist For Fire Protection Systems and Fire Safety MeasuresDocument24 pagesChecklist For Fire Protection Systems and Fire Safety MeasuresMin Htut WinNo ratings yet
- Job Briefing FormDocument2 pagesJob Briefing FormcarlyNo ratings yet
- Interͳdiscipline Check (Idc) : Civil Engineer LS Construction Engineer KRH 08Ͳ12Ͳ21 OwnerDocument21 pagesInterͳdiscipline Check (Idc) : Civil Engineer LS Construction Engineer KRH 08Ͳ12Ͳ21 Ownerramadh diyyazNo ratings yet
- Millenium MallDocument23 pagesMillenium MallAbdullah NadeemNo ratings yet
- Project Report On Automated Multi Storied Car Parking SystemDocument5 pagesProject Report On Automated Multi Storied Car Parking SystemJavaid Iqbal0% (1)
- (G807e) y PM Uk en (04 2015) PDFDocument726 pages(G807e) y PM Uk en (04 2015) PDFEriflonaNo ratings yet
- TPI Certificate - RGB ExteriorsDocument1 pageTPI Certificate - RGB ExteriorsMohammad ArifNo ratings yet
- NY B30 WTC Emergency Procedures Manual 2001 FDR - Entire Contents - Manual 262Document264 pagesNY B30 WTC Emergency Procedures Manual 2001 FDR - Entire Contents - Manual 2629/11 Document Archive100% (2)
- Aybey Alc HataDocument8 pagesAybey Alc HataerkanNo ratings yet
- Ardencote SOP DocumentDocument13 pagesArdencote SOP DocumentmunyekiNo ratings yet
- The Connors Chronicles: F05E04 - The Ghost and The MachineDocument45 pagesThe Connors Chronicles: F05E04 - The Ghost and The MachineLumir G JankuNo ratings yet
- REHS4207 Procedure To Install The New Pinion Shaft in The Circle DriveDocument66 pagesREHS4207 Procedure To Install The New Pinion Shaft in The Circle DriveJuan Carlos Galarza CastilloNo ratings yet
- BIS 14665 Part 2Document6 pagesBIS 14665 Part 2Sunil ChadhaNo ratings yet
- ERC 212/214/216/212z/214z/216z: Operating Instructions 51147713Document248 pagesERC 212/214/216/212z/214z/216z: Operating Instructions 51147713Fernando100% (3)
- Service Manual: WarningDocument250 pagesService Manual: Warninghm.taller8.tijNo ratings yet
- Jib PDFDocument26 pagesJib PDFabhibho12345No ratings yet