Mpu 6000 Ev Board1
Mpu 6000 Ev Board1
Download as pdf or txt
You might also like
- Paccar Multi-Plex 2010Document195 pagesPaccar Multi-Plex 2010Luis Tepezano100% (6)
- Comfortpoint Open: Cpo-Pc200 Plant ControllerDocument10 pagesComfortpoint Open: Cpo-Pc200 Plant Controllerstefanus valorantNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- C-Arm HF 49R Instt - ServiceDocument55 pagesC-Arm HF 49R Instt - ServiceAHMED AWAD ALI100% (1)
- Chloride 70-NetDocument54 pagesChloride 70-NetMarín Ramírez García0% (1)
- Paccar 2010 Multiplexed Electrical System Sevice Manual P30 1011 PDFDocument104 pagesPaccar 2010 Multiplexed Electrical System Sevice Manual P30 1011 PDFJohanny Barrera Hurtado100% (2)
- Jenway 6310 Service Manual PDFDocument84 pagesJenway 6310 Service Manual PDFArdo IsküllNo ratings yet
- Oec 9600imaging Workstation Illustrated Parts ManualDocument95 pagesOec 9600imaging Workstation Illustrated Parts ManualJoe B Bestial100% (1)
- PaccarServiceManual2005 2010Document189 pagesPaccarServiceManual2005 2010Eric Porter100% (21)
- ServiceManualNamux4English PDFDocument112 pagesServiceManualNamux4English PDFFernando Marin100% (8)
- EE008 Load Flow Analysis of IEEE-14 Bus Using E-TAP SoftwareDocument9 pagesEE008 Load Flow Analysis of IEEE-14 Bus Using E-TAP SoftwareJULFANRI SIRAITNo ratings yet
- MT7621 Datasheet v0 3Document44 pagesMT7621 Datasheet v0 3Forrest MengNo ratings yet
- Operating Instructions Control Panels: CP620-x, CP620-WEB-x CP630-x, CP630-WEB-x CP635-x, CP635-WEB-xDocument25 pagesOperating Instructions Control Panels: CP620-x, CP620-WEB-x CP630-x, CP630-WEB-x CP635-x, CP635-WEB-xFabio Passos GuimaraesNo ratings yet
- A06B 6093 H101 β SERIES SERVO AMPLIFIER UNIT FANUC MANUAL PDFDocument74 pagesA06B 6093 H101 β SERIES SERVO AMPLIFIER UNIT FANUC MANUAL PDFNiteshNo ratings yet
- Installation and Operation Manual: ACU-1000 Intelligent Interconnect SystemDocument224 pagesInstallation and Operation Manual: ACU-1000 Intelligent Interconnect SystemMarco PoloNo ratings yet
- PB-002141-00 - E Spectra Service ManualDocument174 pagesPB-002141-00 - E Spectra Service Manualtecvision.assistenciaNo ratings yet
- Operators Manual CE S8Document71 pagesOperators Manual CE S8Nicolae ArpentiiNo ratings yet
- Jenway 6310 Service ManualDocument84 pagesJenway 6310 Service ManualJorge OliveiraNo ratings yet
- Crankshaft Position Sensor (Inductive - Floating) - RunningDocument4 pagesCrankshaft Position Sensor (Inductive - Floating) - Runningopenjavier5208No ratings yet
- Intek M-495 Power ManualDocument40 pagesIntek M-495 Power ManualSteve FahrniNo ratings yet
- HTTPSWWW - Estuneurope.euwp ContentuploadsdownloadManualiAzionamentiETS Series AC Servo User Manual PDFDocument144 pagesHTTPSWWW - Estuneurope.euwp ContentuploadsdownloadManualiAzionamentiETS Series AC Servo User Manual PDFRuanzinn FFNo ratings yet
- Infineon EVAL ICE2QR0680Z RD v01 - 01 EN 1488413Document17 pagesInfineon EVAL ICE2QR0680Z RD v01 - 01 EN 1488413Sutirtha MaitiNo ratings yet
- SPL PortatilDocument295 pagesSPL PortatilInfo e TecNo ratings yet
- VanJee ETC SolutionDocument15 pagesVanJee ETC SolutionAndy Mauricio Gonzalez HerreraNo ratings yet
- Installation / User Manual: Apsystems Yc600 MicroinverterDocument24 pagesInstallation / User Manual: Apsystems Yc600 MicroinverterCarlos BrancoNo ratings yet
- i-VIZION MANUALEDocument124 pagesi-VIZION MANUALEpierresamuel394No ratings yet
- EVK-M8CAM UserGuide (UBX-14002462)Document24 pagesEVK-M8CAM UserGuide (UBX-14002462)bruno magalhãesNo ratings yet
- Dash-2000 V3 ServiceDocument228 pagesDash-2000 V3 ServiceRaimundo JeanNo ratings yet
- Serv7106 V09N02 TXTDocument44 pagesServ7106 V09N02 TXTmario saavedra tarazonaNo ratings yet
- UHF Integrated Long-Range Reader: Installation and User ManualDocument24 pagesUHF Integrated Long-Range Reader: Installation and User ManualARMAND WALDONo ratings yet
- EVK 7 8 M8 PCBVC D - UserGuide - (UBX 14002502)Document27 pagesEVK 7 8 M8 PCBVC D - UserGuide - (UBX 14002502)jaychenonlyNo ratings yet
- MCU ManualDocument20 pagesMCU ManualJoaquínNo ratings yet
- Yaskawa P1000 EIP Install ManualDocument62 pagesYaskawa P1000 EIP Install Manualsrizk1_392564367No ratings yet
- AMC HWManual DigiFlex Panel CANopenDocument74 pagesAMC HWManual DigiFlex Panel CANopenebrazolinNo ratings yet
- Eb Imu 3000 00 01Document14 pagesEb Imu 3000 00 01Giuseppe OnorevoliNo ratings yet
- EVK-M8U UserGuide (UBX-15023994)Document26 pagesEVK-M8U UserGuide (UBX-15023994)bruno magalhãesNo ratings yet
- Multicube ManualDocument39 pagesMulticube ManualArturo DifuntorumNo ratings yet
- Affordable 9 DoF Sensor Fusion kriswiner-MPU6050 Wiki GitHubDocument18 pagesAffordable 9 DoF Sensor Fusion kriswiner-MPU6050 Wiki GitHubkonyeinNo ratings yet
- Antena Gps Hemisphere A101Document34 pagesAntena Gps Hemisphere A101aminatrixNo ratings yet
- ST680 User ManualDocument8 pagesST680 User ManualDaipi DebnathNo ratings yet
- Isolated Amplifier MIU 10: Instruction ManualDocument10 pagesIsolated Amplifier MIU 10: Instruction ManualRobbie Thompson100% (1)
- Isolated Amplifier MIU 10: Instruction ManualDocument10 pagesIsolated Amplifier MIU 10: Instruction ManualRobbie ThompsonNo ratings yet
- 5000 RTDocument44 pages5000 RTJeffeers PrietoNo ratings yet
- Riello TechsdlDocument32 pagesRiello TechsdldkelicNo ratings yet
- Uanalyst 2200 Interactive Timing Analyzer Users Manual Jan85Document230 pagesUanalyst 2200 Interactive Timing Analyzer Users Manual Jan85marcin.miskiewicz.tmeNo ratings yet
- Samsung HT A100t Xef HT Xa100t XefDocument122 pagesSamsung HT A100t Xef HT Xa100t XefJose Perez100% (3)
- 00.040.601 SonixMDP-SP-OP Extended User Manual C 131219Document484 pages00.040.601 SonixMDP-SP-OP Extended User Manual C 131219ROMAN88% (8)
- Seven Service ManualDocument84 pagesSeven Service ManualDavid EguezNo ratings yet
- Anritsu MS462XX VECTOR NETWORK MEASUREMENT SYSTEM 10410-00205Document205 pagesAnritsu MS462XX VECTOR NETWORK MEASUREMENT SYSTEM 10410-00205box4x4No ratings yet
- Invensense Arm Reference Board: Application NoteDocument11 pagesInvensense Arm Reference Board: Application NoteBrajesh ChandraNo ratings yet
- Tmo 963 PDFDocument112 pagesTmo 963 PDFAlex Parra100% (3)
- LCI-80x - User Manual - Rev. DDocument97 pagesLCI-80x - User Manual - Rev. DMike ClancyNo ratings yet
- Uanalyst 2100 Interactive State Analyzer Users Manual Jan85Document258 pagesUanalyst 2100 Interactive State Analyzer Users Manual Jan85marcin.miskiewicz.tmeNo ratings yet
- Mitsubishi UPS - Owners Manual 98AB SMS V20Document67 pagesMitsubishi UPS - Owners Manual 98AB SMS V20Marcelo BenacchioNo ratings yet
- Pact Series: Service Interface For Masterpact NT/NW, Compact NS, and Powerpact P-, R-Frame Circuit BreakersDocument10 pagesPact Series: Service Interface For Masterpact NT/NW, Compact NS, and Powerpact P-, R-Frame Circuit BreakersMohamad MakramNo ratings yet
- Magnum Version 8 Manual Rev1.7Document172 pagesMagnum Version 8 Manual Rev1.7shahzad32552372100% (1)
- App Note 3 - Motion Driver 6.12 Porting GuideDocument14 pagesApp Note 3 - Motion Driver 6.12 Porting GuideDamianNo ratings yet
- X-Ray System TroubleshootingDocument46 pagesX-Ray System TroubleshootingCompuWan PolancoNo ratings yet
- 9700 Owners ManualDocument65 pages9700 Owners ManualEleusis MarquezNo ratings yet
- Guide To Installation & Operations: Swivel Mount Personal Viewing Monitor Model #: Ai-56X-Swx (-Map)Document15 pagesGuide To Installation & Operations: Swivel Mount Personal Viewing Monitor Model #: Ai-56X-Swx (-Map)Jaime ArroyoNo ratings yet
- Infineon IGBT POWER SUPPLYDocument22 pagesInfineon IGBT POWER SUPPLYorkun burkayNo ratings yet
- EnergyPak Plus User Manual - ENDocument8 pagesEnergyPak Plus User Manual - ENAnand sNo ratings yet
- Unit Peperiksaan Fakulti Sains Sosial - Kertas Soalan Peperiksaan Akhir Semester 1 Sesi 2005-2006 PDFDocument169 pagesUnit Peperiksaan Fakulti Sains Sosial - Kertas Soalan Peperiksaan Akhir Semester 1 Sesi 2005-2006 PDFDzulizah Bte SantaNo ratings yet
- Aldi MD8083-2Document1 pageAldi MD8083-2ashesasksNo ratings yet
- Multi-Biometric T&A and Access Control Terminal: FeaturesDocument2 pagesMulti-Biometric T&A and Access Control Terminal: FeaturesMohammad Javad MousaviNo ratings yet
- E Catalog sk8550 1Document2 pagesE Catalog sk8550 1sgwestdepotNo ratings yet
- E7A71v1 0Document87 pagesE7A71v1 0p56jvgqcpnNo ratings yet
- 3 Transistor Headphone Amplifier - Class ABDocument3 pages3 Transistor Headphone Amplifier - Class ABszolid79No ratings yet
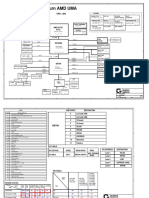
- Hepburn AMD UMA: VER: A00Document70 pagesHepburn AMD UMA: VER: A00avensyeNo ratings yet
- 7" HMI PI3070i-N: SpecificationsDocument1 page7" HMI PI3070i-N: SpecificationsJennifer NúñezNo ratings yet
- Safety and Reference: Owner'S ManualDocument46 pagesSafety and Reference: Owner'S ManualKushal BnNo ratings yet
- Technical Specifications: SUA3000RMI2UDocument2 pagesTechnical Specifications: SUA3000RMI2UDodai アルド SaputraNo ratings yet
- Nu Horizons Electronics - Portal February 2009Document10 pagesNu Horizons Electronics - Portal February 2009Nu HorizonsNo ratings yet
- Dia Del PadreDocument24 pagesDia Del Padrepssef.marketinglpNo ratings yet
- Group 8 - Boarding House Management System - OOPDocument21 pagesGroup 8 - Boarding House Management System - OOPkrzyxynn0916No ratings yet
- Catalogo General FRIMED Refrigeracion 2019Document22 pagesCatalogo General FRIMED Refrigeracion 2019Mauren Lopez100% (1)
- Circuit 1 Lesson LESSONDocument351 pagesCircuit 1 Lesson LESSONRoscarl Gorospe100% (1)
- DH61CR ProductGuide03 EnglishDocument78 pagesDH61CR ProductGuide03 EnglishCarlos Miguel RamirezNo ratings yet
- CANcaseXL Log Config User ManualDocument82 pagesCANcaseXL Log Config User Manualad.hjzhuNo ratings yet
- POLAR Compucut ProductsheetDocument2 pagesPOLAR Compucut ProductsheetKanniyappan GounderNo ratings yet
- Manual Service 50UHDDocument54 pagesManual Service 50UHDoscar herediaNo ratings yet
- Biometric Electronic Wallet For DigitalDocument8 pagesBiometric Electronic Wallet For DigitalHemanth PNo ratings yet
- Nexio Amp 3601 Hdi User Guide 20140408Document149 pagesNexio Amp 3601 Hdi User Guide 20140408Jose Luis Herrera ManriqueNo ratings yet
- OS Update Application: User's GuideDocument9 pagesOS Update Application: User's GuideNirut KaewketNo ratings yet
- Hioki - Electrical Measuring Instruments - 2005Document64 pagesHioki - Electrical Measuring Instruments - 2005Vajda JánosNo ratings yet
- ThinkPad T490s Datasheet ENDocument2 pagesThinkPad T490s Datasheet ENmh.moutaouakilNo ratings yet
- SBC GX533 Datashee-1019413955tDocument2 pagesSBC GX533 Datashee-1019413955tamanagofficialNo ratings yet
- An4938 Getting Started With Stm32h74xig and Stm32h75xig Hardware Development Stmicroelectronics PDFDocument47 pagesAn4938 Getting Started With Stm32h74xig and Stm32h75xig Hardware Development Stmicroelectronics PDFMax INo ratings yet
- 5V 1A Mini/Micro USB 18650 Lithium Battery Charger Board Module TP4056Document5 pages5V 1A Mini/Micro USB 18650 Lithium Battery Charger Board Module TP4056francesco marincolaNo ratings yet