Using Kalman Filter To Reduce and Estimate Type A Uncertainties in Sinusoidal Signals
Using Kalman Filter To Reduce and Estimate Type A Uncertainties in Sinusoidal Signals
Download as pdf or txt
You might also like
- KUKA RobotTrainingDocument17 pagesKUKA RobotTrainingOscar Oscar67% (3)
- Computerized Embroidery Machine: Owner's ManualDocument149 pagesComputerized Embroidery Machine: Owner's ManualNisaiyhout100% (1)
- Service Manual: First Edition Second Printing Part No. 52709Document440 pagesService Manual: First Edition Second Printing Part No. 52709Jhon Hever Benitez100% (1)
- A Comparitive Study of Kalman Filter Extended Kalman Filter and UnscentedDocument9 pagesA Comparitive Study of Kalman Filter Extended Kalman Filter and Unscentedthe man with a brainNo ratings yet
- An Insight Into Noise Covariance Estimation For Kalman Filter DesignDocument6 pagesAn Insight Into Noise Covariance Estimation For Kalman Filter DesignAzhar IqbalNo ratings yet
- Prem Kumar L.S Subir Mansukhani - Prediction Using Kalman FilterDocument9 pagesPrem Kumar L.S Subir Mansukhani - Prediction Using Kalman Filtercrls.thadeuNo ratings yet
- An Introduction To The Kalman FilterDocument48 pagesAn Introduction To The Kalman FilterMuhammad UsmanNo ratings yet
- Unscented Kalman Filter For Frequency and Amplitude Estimation IEEE Powertech 2011Document6 pagesUnscented Kalman Filter For Frequency and Amplitude Estimation IEEE Powertech 2011Tomer YoselevichNo ratings yet
- Adaptive Unscented Filtering Technique and Particle Swarm Optimization For Estimation of Non-Stationary Signal ParametersDocument6 pagesAdaptive Unscented Filtering Technique and Particle Swarm Optimization For Estimation of Non-Stationary Signal ParameterssarojxyzNo ratings yet
- Mathematical Statistics - Kalman Filter Equation Derivation - Cross ValidatedDocument4 pagesMathematical Statistics - Kalman Filter Equation Derivation - Cross ValidatedMuhammad HaroonNo ratings yet
- Laaraiedh PythonPapers KalmanDocument5 pagesLaaraiedh PythonPapers KalmanRyan DavisNo ratings yet
- IVM DIP Apendix FilteringDocument48 pagesIVM DIP Apendix FilteringfcikanNo ratings yet
- A Hybrid Kalman Filter-Fuzzy Logic Multisensor Data Fusion Architecture With Fault Tolerant CharacteristicsDocument7 pagesA Hybrid Kalman Filter-Fuzzy Logic Multisensor Data Fusion Architecture With Fault Tolerant CharacteristicsPonciano Jorge Escamilla-AmbrosioNo ratings yet
- 19 Kalman Filter and Ridge Regression BackpropagationDocument9 pages19 Kalman Filter and Ridge Regression BackpropagationIrtefaa A.No ratings yet
- Adaptive Filters: Angelina A. AquinoDocument2 pagesAdaptive Filters: Angelina A. AquinoAkinoTenshiNo ratings yet
- Adaptive Kalman Filtering For Low-Cost INSGPS RelatedDocument11 pagesAdaptive Kalman Filtering For Low-Cost INSGPS RelatedSarkar SurajitNo ratings yet
- Mau05MathKalman PDFDocument10 pagesMau05MathKalman PDFMococo CatNo ratings yet
- State Estimation ReportDocument15 pagesState Estimation ReportdhineshpNo ratings yet
- Chapter 1 Basic Concepts of Measurement MethodsDocument18 pagesChapter 1 Basic Concepts of Measurement MethodsDiyaa AhmedNo ratings yet
- Lin Et AlDocument10 pagesLin Et AlGoran MiljkovicNo ratings yet
- Estimation, Filtering and Adaptive ProcessesDocument135 pagesEstimation, Filtering and Adaptive Processesmehdicheraghi506No ratings yet
- (C) 2014 - Moving-Horizon Estimation For Discrete-Time Linear Systems WithDocument6 pages(C) 2014 - Moving-Horizon Estimation For Discrete-Time Linear Systems Withdr.awawdeh.moathNo ratings yet
- A New Filtering Approach For Continuous Time Linear Sys - 2014 - IFAC ProceedingDocument6 pagesA New Filtering Approach For Continuous Time Linear Sys - 2014 - IFAC Proceeding彭力No ratings yet
- Extended Kalman Filter Based Missile Tracking: Yassir Obeid Mohammed, Dr. Abdelrasoul Jabar AlzubaidiDocument3 pagesExtended Kalman Filter Based Missile Tracking: Yassir Obeid Mohammed, Dr. Abdelrasoul Jabar AlzubaidiInternational Journal of computational Engineering research (IJCER)No ratings yet
- Estimation of Saturated Data Using The Tobit Kalman FilterDocument6 pagesEstimation of Saturated Data Using The Tobit Kalman FilterParrex ParraNo ratings yet
- Kalman FilteringDocument20 pagesKalman FilteringSai RangaNo ratings yet
- Multifunction Power Quality Monitoring System: V. Matz, T. Radil and P. RamosDocument8 pagesMultifunction Power Quality Monitoring System: V. Matz, T. Radil and P. RamosEng Asem RuqtiNo ratings yet
- OccamposterDocument1 pageOccamposterLian DuanNo ratings yet
- Tdoa Based Ugv Localization Using Adaptive Kalman Filter AlgorithmDocument10 pagesTdoa Based Ugv Localization Using Adaptive Kalman Filter AlgorithmAndra HuangNo ratings yet
- State Estimation Using Kalman FilterDocument32 pagesState Estimation Using Kalman FilterViraj ChaudharyNo ratings yet
- Research On Filtering Algorithm of MEMS Gyroscope Based On Information FusionDocument20 pagesResearch On Filtering Algorithm of MEMS Gyroscope Based On Information FusionBertalan CsanadiNo ratings yet
- Geophysics Dengxiaoying 2016Document13 pagesGeophysics Dengxiaoying 2016nadamauNo ratings yet
- Part OneDocument69 pagesPart OneAbdulrahman Muhammad JamiuNo ratings yet
- Kalman ReportDocument24 pagesKalman Reportsameerfarooq420840No ratings yet
- Adaptive Filter DesignDocument25 pagesAdaptive Filter DesignyusufbityongNo ratings yet
- InTechOpen Kalman PostprintDocument19 pagesInTechOpen Kalman PostprintLê Trung DũngNo ratings yet
- Dcoss09 Submission 49Document14 pagesDcoss09 Submission 49smguruNo ratings yet
- Kalman FilteringDocument15 pagesKalman FilteringCường Lê VănNo ratings yet
- Sensors Kalman FiltersDocument25 pagesSensors Kalman Filtersabdullahnisar92100% (1)
- Elk 24 2 14 1309 60 PDFDocument17 pagesElk 24 2 14 1309 60 PDFAndrew FongNo ratings yet
- Kalman Filter Implemented in The XA Eases Sensory Fusion: Integrated CircuitsDocument10 pagesKalman Filter Implemented in The XA Eases Sensory Fusion: Integrated CircuitshongphilongNo ratings yet
- A Step by Step Mathematical Derivation ADocument32 pagesA Step by Step Mathematical Derivation AivicaNo ratings yet
- A Practical Method For Calculating Largest Lyapunov Exponents From Small Data SetsDocument18 pagesA Practical Method For Calculating Largest Lyapunov Exponents From Small Data Setsgaminster6935No ratings yet
- WR Iee2Document6 pagesWR Iee2Sayed Ahmed Ali AlqallafNo ratings yet
- 5 - Convolution and Filtering - Week 6Document64 pages5 - Convolution and Filtering - Week 6renatto.guiusseppe.peraltaNo ratings yet
- Pandey 2016Document6 pagesPandey 2016Sreekrishna DasNo ratings yet
- Tutorial On Kalman FilterDocument47 pagesTutorial On Kalman FiltertadittiNo ratings yet
- FPGA Based Kalman Filter For Wireless Sensor NetworksDocument5 pagesFPGA Based Kalman Filter For Wireless Sensor Networkseditor2533No ratings yet
- AM/FM Signal Estimation With Micro-Segmentation and Polynomial Fit Zeynel Deprem, A. Enis Çetin, Orhan ArıkanDocument15 pagesAM/FM Signal Estimation With Micro-Segmentation and Polynomial Fit Zeynel Deprem, A. Enis Çetin, Orhan ArıkanhaberpodNo ratings yet
- Adaptive Affinity Propagation ClusteringDocument6 pagesAdaptive Affinity Propagation ClusteringPrathamesh PawarNo ratings yet
- Kalman Filters Theory and ImplementationDocument13 pagesKalman Filters Theory and ImplementationivicaNo ratings yet
- Volatility Extraction in Information Based Asset Pricing Framework Via Non-Linear FilteringDocument16 pagesVolatility Extraction in Information Based Asset Pricing Framework Via Non-Linear Filteringoiskandardinata1No ratings yet
- Estimation - Final ProjectDocument3 pagesEstimation - Final ProjectJames CarrilloNo ratings yet
- KALMAN FILTER Applications in Image ProcessingDocument24 pagesKALMAN FILTER Applications in Image ProcessingHayder KadhimNo ratings yet
- Unit 4Document108 pagesUnit 4mjyothsnagoudNo ratings yet
- Advanced Energy Sensing Techniques Implemented Through Source Number Detection For Spectrum Sensing in CRDocument9 pagesAdvanced Energy Sensing Techniques Implemented Through Source Number Detection For Spectrum Sensing in CRradhakodirekka8732No ratings yet
- Kalman FilterDocument11 pagesKalman Filterhubble86No ratings yet
- A Complete Receiver Solution For A Chaotic Direct Sequence Spread Spectrum Communication SystemDocument4 pagesA Complete Receiver Solution For A Chaotic Direct Sequence Spread Spectrum Communication SystemNhan BuiNo ratings yet
- Instrumentation (Chapter 2)Document7 pagesInstrumentation (Chapter 2)Yab TadNo ratings yet
- l10 - Data Fusion and Estimation v22Document44 pagesl10 - Data Fusion and Estimation v22Pham Xuan ThuyNo ratings yet
- Digital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionFrom EverandDigital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionNo ratings yet
- Technical and Economical Study of Thread Measurement/Calibration Method With Scanner InstrumentDocument4 pagesTechnical and Economical Study of Thread Measurement/Calibration Method With Scanner InstrumentLEDNo ratings yet
- Uncertainty Analysis of Positional Deviations of CNC Machine ToolsDocument4 pagesUncertainty Analysis of Positional Deviations of CNC Machine ToolsLEDNo ratings yet
- Tutorial 2Document6 pagesTutorial 2LEDNo ratings yet
- Artificial Intelligence Based Supervision and Confirmation of Complex Measurement SystemsDocument4 pagesArtificial Intelligence Based Supervision and Confirmation of Complex Measurement SystemsLEDNo ratings yet
- Tutorial 1Document1 pageTutorial 1LEDNo ratings yet
- Development of 2 and 3-D Aerodynamic Testing Technology For High Performance Aircraft DesignDocument5 pagesDevelopment of 2 and 3-D Aerodynamic Testing Technology For High Performance Aircraft DesignLEDNo ratings yet
- Tutorial 5Document1 pageTutorial 5LEDNo ratings yet
- Tutorial 4Document40 pagesTutorial 4LEDNo ratings yet
- III Brazilian Congress of Metrology September 1 - 5, 2003Document12 pagesIII Brazilian Congress of Metrology September 1 - 5, 2003LEDNo ratings yet
- Brazilian Gravity Standards: Absolute Gravimeters Fg-5 and A-10Document5 pagesBrazilian Gravity Standards: Absolute Gravimeters Fg-5 and A-10LEDNo ratings yet
- III Brazilian Congress of Metrology September 1 - 5, 2003Document12 pagesIII Brazilian Congress of Metrology September 1 - 5, 2003LEDNo ratings yet
- Tutorial 10Document7 pagesTutorial 10LEDNo ratings yet
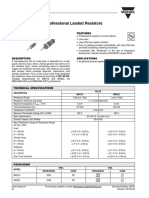
- Resistor 1k - Vishay - 0.6wDocument3 pagesResistor 1k - Vishay - 0.6wLEDNo ratings yet
- Guild Line 9334 A Data SheetDocument3 pagesGuild Line 9334 A Data SheetLEDNo ratings yet
- 3000 Series BrochureDocument11 pages3000 Series BrochureLEDNo ratings yet
- Rotary Stepper MotorsDocument66 pagesRotary Stepper MotorsLED100% (1)
- Crude Oil Stabilization Weekly Report 13 Jan 2023Document6 pagesCrude Oil Stabilization Weekly Report 13 Jan 2023Andy ArdianNo ratings yet
- Pipe Wall Thickness Calculation Technical ReportDocument4 pagesPipe Wall Thickness Calculation Technical ReportImalah UgoachanumNo ratings yet
- LINEAR INDUCTION MOTOR 6981660.ppsxDocument56 pagesLINEAR INDUCTION MOTOR 6981660.ppsxFalley FasterNo ratings yet
- Spigot ,: ClearanceDocument8 pagesSpigot ,: Clearanceangela yuNo ratings yet
- Yuri ResumeDocument1 pageYuri ResumeRohan Yuri SanspeurNo ratings yet
- AproPLAN The Circle of Productivity 1Document25 pagesAproPLAN The Circle of Productivity 1Corui Mihai ValerNo ratings yet
- 777FDocument93 pages777FAlcanfred Cte Bto100% (7)
- 2012 S. Marchetti IGC DelhiDocument5 pages2012 S. Marchetti IGC DelhiKarla CaNo ratings yet
- Sniffing Network Traffic in PythonDocument27 pagesSniffing Network Traffic in PythonnarendraNo ratings yet
- DX 394 AlignmentDocument6 pagesDX 394 AlignmentGonzalo RodriguezNo ratings yet
- M3GuideTransforms PDFDocument97 pagesM3GuideTransforms PDFRicardo GermanoNo ratings yet
- Stresses in SoilDocument37 pagesStresses in SoilRadhaAnanthalekshmiNo ratings yet
- Micro Air 100 PDFDocument2 pagesMicro Air 100 PDFFrancois-No ratings yet
- IEEE 802.11g: The New Mainstream Wireless LAN StandardDocument12 pagesIEEE 802.11g: The New Mainstream Wireless LAN StandarddeviNo ratings yet
- Power Plant Engineering Question BankDocument10 pagesPower Plant Engineering Question Bankramaprasad1967100% (2)
- OPSS 905 Nov06Document15 pagesOPSS 905 Nov06Nikola MNo ratings yet
- IUPWARE MAster Thesis Carlos MuñozDocument60 pagesIUPWARE MAster Thesis Carlos MuñozCarlos MuñozNo ratings yet
- Agile Schedule in ExcelDocument2 pagesAgile Schedule in ExcelAntonNo ratings yet
- Machining Workshop Report 2Document17 pagesMachining Workshop Report 2Harith DanialNo ratings yet
- ESPA Nadorself Pump ManualDocument32 pagesESPA Nadorself Pump ManualJaime Zzaa100% (1)
- Modern Control Technology Components & Systems (2nd Ed.)Document2 pagesModern Control Technology Components & Systems (2nd Ed.)musarraf172No ratings yet
- Tower Schedule HBDocument20 pagesTower Schedule HBumeshmishrahetaudaNo ratings yet
- IRC SP 76-2015 Conventional - Thin WhitetoppingDocument52 pagesIRC SP 76-2015 Conventional - Thin WhitetoppingjitendraNo ratings yet
- Data Sheet: BC160 BC161Document8 pagesData Sheet: BC160 BC161mitrosNo ratings yet
- Course Handbook: BSC (Hons) Computer Games ProgrammingDocument38 pagesCourse Handbook: BSC (Hons) Computer Games ProgrammingPrabu ThiruchelvamNo ratings yet
- Datasheet Saphir Flex 2016 EN v1Document2 pagesDatasheet Saphir Flex 2016 EN v1André CardosoNo ratings yet