Performance - Class A (AE Materials) Climb
Performance - Class A (AE Materials) Climb
Download as pdf or txt
You might also like
- Audi A8 d3 Electrical WiringDocument313 pagesAudi A8 d3 Electrical Wiringnicolae cristianNo ratings yet
- 737 Performance Reference Handbook - EASA EditionFrom Everand737 Performance Reference Handbook - EASA EditionRating: 4.5 out of 5 stars4.5/5 (3)
- 07descent and LandingDocument24 pages07descent and LandingVlad Bogdan100% (1)
- Stage 1 - Initial TestDocument10 pagesStage 1 - Initial Testafdsfagadg100% (1)
- Jet Flight Training: Brochure & Price ListDocument11 pagesJet Flight Training: Brochure & Price ListalomejorotrodiaNo ratings yet
- Briefing TCP PDFDocument13 pagesBriefing TCP PDFNadjib Jimmy KrtNo ratings yet
- Wiley - Ground Studies For Pilots - Radio Aids Sixth Edition - 978!0!632-05573-9Document2 pagesWiley - Ground Studies For Pilots - Radio Aids Sixth Edition - 978!0!632-05573-9Omkar JituriNo ratings yet
- Cross Country Planning ChecklistDocument2 pagesCross Country Planning ChecklistYusuke Shimma100% (1)
- Jepessen Charts NotesDocument15 pagesJepessen Charts NotesZarrar KhanNo ratings yet
- Briefing 13 Circuit, Approach and LandingDocument18 pagesBriefing 13 Circuit, Approach and Landings raman100% (1)
- Project Data Sheet: Meizhou WanDocument1 pageProject Data Sheet: Meizhou WanDiego PascualNo ratings yet
- Performance Numbers - VspeedsDocument6 pagesPerformance Numbers - VspeedsLuis Tavares100% (1)
- Landing ConsiderationDocument4 pagesLanding ConsiderationАлександр ОрловNo ratings yet
- 7354616Document30 pages7354616Adharsh JamesNo ratings yet
- A330 Normal Law: Putting Fly-by-Wire Into PerspectiveFrom EverandA330 Normal Law: Putting Fly-by-Wire Into PerspectiveRating: 5 out of 5 stars5/5 (2)
- LPJ Operational ProceduresDocument90 pagesLPJ Operational ProceduresmuratNo ratings yet
- Circling Approach Briefing - English VersionDocument12 pagesCircling Approach Briefing - English Versionözgür Tanriverdi100% (1)
- İFR QuestionsDocument5 pagesİFR QuestionsZulik ZulikNo ratings yet
- Oxford Aviation Yash Air TRDocument19 pagesOxford Aviation Yash Air TRrockinskull50% (2)
- 5 Rules-Of-Thumb Every Pilot Should Know BoldmethodDocument1 page5 Rules-Of-Thumb Every Pilot Should Know BoldmethodOu FeiNo ratings yet
- Instructor Lesson PlansDocument32 pagesInstructor Lesson PlansWaiZin MinHtetNo ratings yet
- Summary of KnowledgeDocument12 pagesSummary of Knowledgerakotomanga100% (1)
- Stabilized Approach: Tool KitDocument5 pagesStabilized Approach: Tool KitQushay Al Idrus100% (1)
- 3 - Maneuver Fixed WingDocument32 pages3 - Maneuver Fixed WingAprimond SyuharNo ratings yet
- All Weather Operation RegulationsDocument102 pagesAll Weather Operation RegulationsIanko StoimenovNo ratings yet
- Briefing 18A Pilot NavigationDocument19 pagesBriefing 18A Pilot Navigationsami rahman100% (4)
- Instruments Daily QuestionsDocument146 pagesInstruments Daily QuestionsPeter ChanceNo ratings yet
- Graphic IFR Departure ProceduresDocument5 pagesGraphic IFR Departure ProceduresGooreshNo ratings yet
- Lfus Phase 3Document21 pagesLfus Phase 3pyanmorNo ratings yet
- 767circling Approach PDFDocument1 page767circling Approach PDFjunk5154No ratings yet
- Proper Landing TechniqueDocument2 pagesProper Landing Techniqueanshit1No ratings yet
- Contingency Procedures NAT RegionDocument4 pagesContingency Procedures NAT RegionflyspannerrNo ratings yet
- Sportys Instrument SyllabusDocument80 pagesSportys Instrument SyllabusPaul KostukovskyNo ratings yet
- Secondary StallsDocument3 pagesSecondary StallsMike Aguirre100% (1)
- Flight Performance Planning PDFDocument9 pagesFlight Performance Planning PDFvimuktiNo ratings yet
- Human Performance and LimitationDocument39 pagesHuman Performance and LimitationMahesh MahajanNo ratings yet
- ABF Pilot Training Manual: Meteorology (MET)Document22 pagesABF Pilot Training Manual: Meteorology (MET)Sanjay JayaratneNo ratings yet
- Atpl Theory Formulas PDFDocument64 pagesAtpl Theory Formulas PDFKumar Airplanefreak100% (1)
- 6 - Engine Failure in The CircuitDocument14 pages6 - Engine Failure in The CircuitfoeoejNo ratings yet
- Threat and Error Management RTCDocument9 pagesThreat and Error Management RTCmicheleNo ratings yet
- VFR Cross CountryDocument2 pagesVFR Cross CountrySuketu5No ratings yet
- 2013 Rnav Approaches FactsheetDocument2 pages2013 Rnav Approaches FactsheetEdwin SenNo ratings yet
- Airspace Flash Cards - Stick-n-Rudder Flight Training (PDFDrive) PDFDocument20 pagesAirspace Flash Cards - Stick-n-Rudder Flight Training (PDFDrive) PDFNaguibNo ratings yet
- TH IFR UsaDocument25 pagesTH IFR UsaFabio Rodrigo Grubert100% (2)
- Visual Descent Point (VDP)Document4 pagesVisual Descent Point (VDP)gambit_zetaNo ratings yet
- 032 - Flight Performance and PlanningDocument4 pages032 - Flight Performance and PlanningUvin RanaweeraNo ratings yet
- UPRT - Aerodynamic Principles of Large Airplane Upsets MAR 16Document14 pagesUPRT - Aerodynamic Principles of Large Airplane Upsets MAR 16Sacha MilovanNo ratings yet
- Definitions - Runway PerformanceDocument89 pagesDefinitions - Runway PerformanceBruceNo ratings yet
- Autopilot Kap140 Bendixking For Da42Document42 pagesAutopilot Kap140 Bendixking For Da42Crystal Murray100% (1)
- IFR-Notes-v1 6 3Document12 pagesIFR-Notes-v1 6 3M HNo ratings yet
- Flying TwinsDocument62 pagesFlying Twinsthe_govNo ratings yet
- Model E-Exam No.2 Easa Atpl MeteorologyDocument10 pagesModel E-Exam No.2 Easa Atpl Meteorologyfidez90No ratings yet
- Instrument Rating TP 691 eDocument12 pagesInstrument Rating TP 691 eTamarindosoNo ratings yet
- Airline Transport Pilot (Atp) Exam Briefing Guide and Flight Test StandardsDocument10 pagesAirline Transport Pilot (Atp) Exam Briefing Guide and Flight Test StandardsRodrigo HalzenthNo ratings yet
- ATPL Inst 6.3 PDFDocument8 pagesATPL Inst 6.3 PDFKoustubh VadalkarNo ratings yet
- Flight Training: 5 Attitudes and MovementsDocument8 pagesFlight Training: 5 Attitudes and MovementsHenry JiangNo ratings yet
- Your Aircraft in Case You Develop RCF?Document77 pagesYour Aircraft in Case You Develop RCF?Abha Kadav100% (1)
- Avoiding Unstable Approaches Important Tips For AtcoDocument2 pagesAvoiding Unstable Approaches Important Tips For AtcoArjan Mukherjee100% (1)
- ERAU-Flight Operations Manual (PDF) - Course SidekickDocument305 pagesERAU-Flight Operations Manual (PDF) - Course SidekickCarlos Guillermo Calls FerroNo ratings yet
- H 1 T P A: Andling Ense Eaflet WIN Iston EroplanesDocument8 pagesH 1 T P A: Andling Ense Eaflet WIN Iston Eroplanesroyalairmaroc737No ratings yet
- Questions For StudentsDocument97 pagesQuestions For Studentshahdbaj100% (1)
- Worksheet SEPDocument5 pagesWorksheet SEPafdsfagadgNo ratings yet
- 12 NavGen - Lamberts V2Document45 pages12 NavGen - Lamberts V2afdsfagadgNo ratings yet
- Situational Awareness: How To Gain and Maintain ItDocument31 pagesSituational Awareness: How To Gain and Maintain Itafdsfagadg100% (2)
- Aerofoil TerminologyDocument66 pagesAerofoil TerminologyafdsfagadgNo ratings yet
- Attachment 1 - Comparison Between Easa Amc and Altmoc For Ara - Fcl.300 (B) Examination ProceduresDocument15 pagesAttachment 1 - Comparison Between Easa Amc and Altmoc For Ara - Fcl.300 (B) Examination ProceduresafdsfagadgNo ratings yet
- Visual Acuity Conversion ChartDocument1 pageVisual Acuity Conversion Chartafdsfagadg100% (1)
- CX A350 Special 2016Document16 pagesCX A350 Special 2016afdsfagadg100% (2)
- PracticeDocument14 pagesPracticeafdsfagadg100% (1)
- Mental Math (DomPaul)Document1 pageMental Math (DomPaul)afdsfagadgNo ratings yet
- Launch Dates For CX Passenger FlightsDocument2 pagesLaunch Dates For CX Passenger FlightsafdsfagadgNo ratings yet
- CXW222Document16 pagesCXW222afdsfagadgNo ratings yet
- Handbook 2Document318 pagesHandbook 2afdsfagadgNo ratings yet
- Airbus A350Document52 pagesAirbus A350afdsfagadg100% (6)
- Design PDFDocument10 pagesDesign PDFSUPRIYANo ratings yet
- The ListDocument11 pagesThe ListScott LiNo ratings yet
- Essenlials: 1) Spare List With Price (Discounted) GMK 2035 SPL Part Number Items QTY Unit Price (USD) Amount Price (USD)Document3 pagesEssenlials: 1) Spare List With Price (Discounted) GMK 2035 SPL Part Number Items QTY Unit Price (USD) Amount Price (USD)Avijit DasguptaNo ratings yet
- Revised SOP For Handling of VVIP FlightsDocument17 pagesRevised SOP For Handling of VVIP FlightsPavan Gopalapuram50% (2)
- CHART NO.2888, Dev Card NO. 2, Tide Table 2000, Variation 5 EDocument3 pagesCHART NO.2888, Dev Card NO. 2, Tide Table 2000, Variation 5 EMehrdadNo ratings yet
- Weapons Used Aboard Ming Chinese Ships A PDFDocument23 pagesWeapons Used Aboard Ming Chinese Ships A PDFCharlie CokelatNo ratings yet
- 2016 Arctic Cat M 6000 LTD 153 (S2016M6DPSUSB) Tunnel, Rear Bumper, and Snowflap Assembly CyclePartsNation Arctic Cat Parts NaDocument1 page2016 Arctic Cat M 6000 LTD 153 (S2016M6DPSUSB) Tunnel, Rear Bumper, and Snowflap Assembly CyclePartsNation Arctic Cat Parts NaAdamNo ratings yet
- LTBO Uşak 10-9 Jeppesen ChartDocument1 pageLTBO Uşak 10-9 Jeppesen CharteserimNo ratings yet
- BLDG LAWS Quiz 4 BP 344 QNADocument2 pagesBLDG LAWS Quiz 4 BP 344 QNAstuckinyournightmare storiesNo ratings yet
- Road LabDocument298 pagesRoad LabAzmi BazazouNo ratings yet
- FALLSEM2018-19 - MEE1004 - ETH - MB309 - VL2018191003741 - Reference Material I - Fluid Mechanics-2 PDFDocument48 pagesFALLSEM2018-19 - MEE1004 - ETH - MB309 - VL2018191003741 - Reference Material I - Fluid Mechanics-2 PDFSivaram PeramNo ratings yet
- Module-3 Steering System-Mps-2024Document7 pagesModule-3 Steering System-Mps-2024Sidharth P VNo ratings yet
- Cat 793D PDFDocument32 pagesCat 793D PDFmark towerNo ratings yet
- JTOMDocument11 pagesJTOMAndhika Supriat PutraNo ratings yet
- Q3 and Q4 Eim PDFDocument14 pagesQ3 and Q4 Eim PDFNguyễn Ngọc Phương LinhNo ratings yet
- Titan y Aarmada CKP PDFDocument3 pagesTitan y Aarmada CKP PDFLeandro FerreiraNo ratings yet
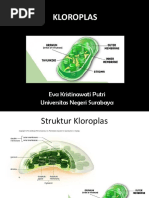
- KLOROPLASDocument32 pagesKLOROPLASSintha Eka AshariNo ratings yet
- Manpower Present Status FormatDocument8 pagesManpower Present Status Formatmohitmishra9210No ratings yet
- The 2016 ISX15: Now A Great Engine Is Even Better!Document2 pagesThe 2016 ISX15: Now A Great Engine Is Even Better!Abdelkader DraïNo ratings yet
- Nitrogen BrochureDocument4 pagesNitrogen BrochureavarvanyNo ratings yet
- Industrial ShakersDocument4 pagesIndustrial ShakersMpi ServicesNo ratings yet
- h2 Cooling & Seal Oil System Stage-2Document13 pagesh2 Cooling & Seal Oil System Stage-2raghavendran raghu100% (2)
- Your Solution Network: Middle EastDocument24 pagesYour Solution Network: Middle EastDrPadipat ChaemmangkangNo ratings yet
- Palanguia PowDocument44 pagesPalanguia PowShyra MaximoNo ratings yet
- Ola (India) Building Customer Loyalty To App-Based ServicesDocument17 pagesOla (India) Building Customer Loyalty To App-Based ServicesDhwani ShahNo ratings yet
- Evaluation of Traffic Flow at Signalized Intersections: A Case Study of Kano City, NigeriaDocument87 pagesEvaluation of Traffic Flow at Signalized Intersections: A Case Study of Kano City, NigeriaJones lubaNo ratings yet
- Vertical Take OffDocument8 pagesVertical Take Offnatrajan-ram-379No ratings yet
- 36rh, 37rh, 46rh, 46re, 47rh, 47re, 48reDocument12 pages36rh, 37rh, 46rh, 46re, 47rh, 47re, 48remyszkinson86% (7)