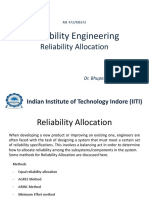
Reliability Engineering
Reliability Engineering
Download as pdf or txt
At a glance
Powered by AI
The key takeaways are that reliability depends on whether an item is repairable or non-repairable, and there are different ways to define and measure reliability for each case.
For non-repairable items, only one failure can occur and reliability is the probability of survival over the expected life. For repairable items, more than one failure can occur and reliability is the probability of no failure in the period of interest.
For non-repairable items, reliability is defined as the survival probability over the item’s expected life or a period of its life. For repairable items, reliability is defined as the probability of no failure occurring in the period of interest.
You might also like
- Assignment 2 (Vishnubhai Jayeshbhai Panchal 202285861)Document8 pagesAssignment 2 (Vishnubhai Jayeshbhai Panchal 202285861)Ashish VoraNo ratings yet
- Reliability-21 08 2023Document51 pagesReliability-21 08 2023Tech GuruNo ratings yet
- Assignment-MN572-Reliability EngineeringDocument1 pageAssignment-MN572-Reliability EngineeringArun Kumar100% (1)
- Student Union Election Online Voting SystemDocument44 pagesStudent Union Election Online Voting SystemBullet AristoNo ratings yet
- Lecture No 12 MaintainabilityDocument25 pagesLecture No 12 MaintainabilityAltamash MunirNo ratings yet
- Statistics WorkDocument2 pagesStatistics WorkBrittanyWilliams50% (2)
- 6336 Lecture01Document27 pages6336 Lecture01Alican BodurNo ratings yet
- Unit-V: Reliability, Reliability Centered Maintenance (RCM)Document32 pagesUnit-V: Reliability, Reliability Centered Maintenance (RCM)Joel ChittiproluNo ratings yet
- Note7 - Reliability - Theory - RevisedDocument5 pagesNote7 - Reliability - Theory - RevisedMohamed El KikiNo ratings yet
- Application of Lifetime Models in Maintenance (Case Study: Thermal Electricity Generation in Sudan)Document14 pagesApplication of Lifetime Models in Maintenance (Case Study: Thermal Electricity Generation in Sudan)IOSRjournalNo ratings yet
- Ebeling Ch2-3Document18 pagesEbeling Ch2-3Saurab Devanandan0% (1)
- Introduction To Reliability Engineering - CERN 06.11Document48 pagesIntroduction To Reliability Engineering - CERN 06.11Solanke AnuNo ratings yet
- Minimal Cutset Enumeration and Network Reliability Evaluation by Recursive Merge and BDDDocument6 pagesMinimal Cutset Enumeration and Network Reliability Evaluation by Recursive Merge and BDDMd. Arifur KabirNo ratings yet
- Fault Tree Analysis For Maintenance NeedDocument23 pagesFault Tree Analysis For Maintenance NeedVinayNo ratings yet
- Reliability Engineering: Kartik Gupta 2K13/PE/016Document15 pagesReliability Engineering: Kartik Gupta 2K13/PE/016Kartik GuptaNo ratings yet
- Reliability: Federal University of Technology OwerriDocument105 pagesReliability: Federal University of Technology Owerridialauchenna100% (2)
- DLL Engineering Simple Reliability Calculations: Empirical Failure RateDocument8 pagesDLL Engineering Simple Reliability Calculations: Empirical Failure RateFahad Sarfraz100% (1)
- The Missing ManualDocument51 pagesThe Missing Manualsindhu adhiwijayaNo ratings yet
- Total Productive MaintenanceDocument3 pagesTotal Productive MaintenancebhnodarNo ratings yet
- Chapter - Five: Reliability, Availability and MaintainabilityDocument25 pagesChapter - Five: Reliability, Availability and MaintainabilityfekadeNo ratings yet
- Reliability Question PaperDocument2 pagesReliability Question PaperIshikaNo ratings yet
- Maintenance and Reliability - Theory: John E. Skog P.E. WGA3-06 Tutorial June 2006 Rio de JaneiroDocument59 pagesMaintenance and Reliability - Theory: John E. Skog P.E. WGA3-06 Tutorial June 2006 Rio de JaneiroDXLopesNo ratings yet
- 4.reliability in Electrical SystemsDocument31 pages4.reliability in Electrical SystemsCharles OndiekiNo ratings yet
- Design For Manufac Ture and Assembly (Dfma)Document13 pagesDesign For Manufac Ture and Assembly (Dfma)Harshal KhotNo ratings yet
- Brall 2007Document6 pagesBrall 2007ronaldNo ratings yet
- Solution Manual To Chapter 05Document13 pagesSolution Manual To Chapter 05Vimox S Shah100% (1)
- Terminology of Graph PDFDocument18 pagesTerminology of Graph PDFAkyasNo ratings yet
- Using ABAQUS For Reliability Analysis by Directional SimulationDocument15 pagesUsing ABAQUS For Reliability Analysis by Directional Simulationklomps_jrNo ratings yet
- Overview of Reliability Engineering: Eric MarsdenDocument34 pagesOverview of Reliability Engineering: Eric MarsdenLuis Gonzalo100% (1)
- Reliability and Maintenance (MANE 4015) : Instructor: Dr. Sayyed Ali Hosseini Winter 2015 Lecture #4Document26 pagesReliability and Maintenance (MANE 4015) : Instructor: Dr. Sayyed Ali Hosseini Winter 2015 Lecture #4Felipe100% (1)
- Fault TreeDocument30 pagesFault TreeMTECH IPSNo ratings yet
- Barringer Analyzer ReliabilityDocument9 pagesBarringer Analyzer ReliabilityTessfaye Wolde Gebretsadik100% (2)
- Midterm Exam Plus Solutions Spring 2014Document6 pagesMidterm Exam Plus Solutions Spring 2014IsraelVictorNo ratings yet
- Getting Started With PSCADDocument22 pagesGetting Started With PSCADAfshinNo ratings yet
- Availability and ReliabilityDocument3 pagesAvailability and ReliabilityUsama SheikhNo ratings yet
- C Programming, Design A Spring (Helical) Under Given Static and Fluctuating Load For A Given Spring Index So That The Spring Design Lie Within Safe Limit.Document12 pagesC Programming, Design A Spring (Helical) Under Given Static and Fluctuating Load For A Given Spring Index So That The Spring Design Lie Within Safe Limit.Manoj Kumar GangwarNo ratings yet
- Basic Principles of Engineering MetrologyDocument25 pagesBasic Principles of Engineering MetrologyRay DebashishNo ratings yet
- 16 Fault ToleranceDocument34 pages16 Fault ToleranceSanthosh LagisettyNo ratings yet
- Exercises On Reliability in Electrical SystemsDocument21 pagesExercises On Reliability in Electrical SystemsCharles OndiekiNo ratings yet
- Introduction To Reliability: EN0625 Design and Manufacturing AnalysisDocument50 pagesIntroduction To Reliability: EN0625 Design and Manufacturing AnalysisAl AidenNo ratings yet
- Ch04 ReliabilityDocument20 pagesCh04 ReliabilityBENZIN100% (2)
- Regenerative Suspension SystemDocument24 pagesRegenerative Suspension Systemvineeth100% (1)
- Reliability EngineeringDocument31 pagesReliability Engineeringshreeram79No ratings yet
- ReliabilityDocument58 pagesReliabilityGorvendra Singh100% (1)
- Bath Tub CurveDocument12 pagesBath Tub CurveMurali Krishna GbNo ratings yet
- Fault Tree Analysis SlidesDocument12 pagesFault Tree Analysis SlidesFazli FadzilNo ratings yet
- Lecture No 11 Reliability Centered MaintenanceDocument33 pagesLecture No 11 Reliability Centered MaintenanceAltamash Munir100% (1)
- 3 Constant Failure Rate ModelsDocument21 pages3 Constant Failure Rate Modelseeit_nizamNo ratings yet
- Advanced Machinery Dynamics Course ContentDocument2 pagesAdvanced Machinery Dynamics Course ContentLe Thanh HaiNo ratings yet
- Applications of Software in Solar Drying Systems A ReviewDocument12 pagesApplications of Software in Solar Drying Systems A ReviewGianCarlo Espinoza ParionaNo ratings yet
- TQ - TheoryMachinesDocument8 pagesTQ - TheoryMachinesnachu_crazy100% (1)
- Agenda: Introduction To Reliability Asset Management System Reliability Equate Terms Failure Pareto PrincipleDocument26 pagesAgenda: Introduction To Reliability Asset Management System Reliability Equate Terms Failure Pareto PrincipleRengarajan ThiruvengadaswamyNo ratings yet
- Reliability Allocation PDFDocument6 pagesReliability Allocation PDFDipankar Shrivastava100% (1)
- Improve Availability, Reliability and MaintainabilityDocument106 pagesImprove Availability, Reliability and MaintainabilityAlvaro Cotaquispe100% (2)
- Repairable and Non-Repairable Items: When Only One Failure Can OccurDocument70 pagesRepairable and Non-Repairable Items: When Only One Failure Can OccurEdin100% (1)
- Class 05 - Constant Failure Rate ModelDocument22 pagesClass 05 - Constant Failure Rate ModelTrina JesurumNo ratings yet
- Risk Analysis For Information and Systems Engineering: INSE 6320 - Week 6Document9 pagesRisk Analysis For Information and Systems Engineering: INSE 6320 - Week 6ALIKNF100% (1)
- DP 471: Electrical Safety and Maintenance: Lesson 3: Reliability AnalysisDocument9 pagesDP 471: Electrical Safety and Maintenance: Lesson 3: Reliability AnalysisCalvinhoNo ratings yet
- Risk Analysis For Information and Systems Engineering: INSE 6320 - Week 3 Session 2Document23 pagesRisk Analysis For Information and Systems Engineering: INSE 6320 - Week 3 Session 2Deepika ManglaNo ratings yet
- Implementing The Reliability Strategy: Prof. Charlton S. InaoDocument31 pagesImplementing The Reliability Strategy: Prof. Charlton S. Inaoabdullah 3mar abou reasha100% (1)
- Hypothesis in Hotel BookingDocument49 pagesHypothesis in Hotel BookingUmashankar GautamNo ratings yet
- 68617302-Spermans-Rank-Correlation Solved ExamplesDocument23 pages68617302-Spermans-Rank-Correlation Solved ExamplesUmashankar GautamNo ratings yet
- 68617302-Spermans-Rank-Correlation Solved ExamplesDocument23 pages68617302-Spermans-Rank-Correlation Solved ExamplesUmashankar GautamNo ratings yet
- Inbound Outbound LogisticsDocument8 pagesInbound Outbound LogisticsUmashankar GautamNo ratings yet
- Basic StatisticsDocument31 pagesBasic StatisticsUmashankar GautamNo ratings yet
- MSA TrainingDocument3 pagesMSA TrainingUmashankar GautamNo ratings yet
- A Quality Management System Implementation Framework For Small-Sized CompaniesDocument169 pagesA Quality Management System Implementation Framework For Small-Sized CompaniesUmashankar Gautam100% (2)
- SOD Machinery FMEADocument3 pagesSOD Machinery FMEAUmashankar Gautam100% (1)
- Makigami Process AnalysisDocument28 pagesMakigami Process AnalysisUmashankar GautamNo ratings yet
- 7 Errors in SPCDocument3 pages7 Errors in SPCUmashankar GautamNo ratings yet
- Self Assessment Questions: Chapter-1 ManagementDocument45 pagesSelf Assessment Questions: Chapter-1 ManagementUmashankar GautamNo ratings yet
- QM HandoutDocument65 pagesQM HandoutUmashankar GautamNo ratings yet
- ShaininDocument58 pagesShaininUmashankar Gautam50% (2)
- VAK ChecklistDocument1 pageVAK ChecklistUmashankar Gautam100% (2)
- Tukey End Count MethodDocument2 pagesTukey End Count MethodUmashankar GautamNo ratings yet
- Problem SolvingDocument18 pagesProblem SolvingUmashankar GautamNo ratings yet
- Problem SolvingDocument18 pagesProblem SolvingUmashankar GautamNo ratings yet
- DEVOPSDocument15 pagesDEVOPSjaveeed0401No ratings yet
- 3 - Industrial Mobile Robots Safety Standard UpdateDocument35 pages3 - Industrial Mobile Robots Safety Standard Update.adtmmal100% (1)
- Zig LanguageDocument16 pagesZig LanguageMr ChashmatoNo ratings yet
- Report of ADS-B SITF13-25th V4-RevDocument190 pagesReport of ADS-B SITF13-25th V4-RevSergioNo ratings yet
- Jpos OverviewDocument17 pagesJpos Overviewernestohp7No ratings yet
- Chapter 6 - Process ModellingDocument46 pagesChapter 6 - Process Modellingkeymoney366No ratings yet
- Resume Sameer PacharneDocument3 pagesResume Sameer PacharnemkshmistryNo ratings yet
- Nassau Community College: Nancy Stern Hofstra University Robert A. SternDocument66 pagesNassau Community College: Nancy Stern Hofstra University Robert A. SternAsk NameNo ratings yet
- Panashe Assignment 1Document5 pagesPanashe Assignment 1Panashe EliasNo ratings yet
- MHBA Lab 12Document15 pagesMHBA Lab 12Hassan AdeelNo ratings yet
- Software Quality Assurance A Self-Teaching IntroductionDocument677 pagesSoftware Quality Assurance A Self-Teaching IntroductionGerry Raditya Kusmana YahyaNo ratings yet
- Nowa Era Poziom Podstawowy MatmaDocument155 pagesNowa Era Poziom Podstawowy MatmaKlaudia LeszczyńskaNo ratings yet
- Chapter 2. Introducing The UML: The Unified Modeling Language User Guide Second EditionDocument35 pagesChapter 2. Introducing The UML: The Unified Modeling Language User Guide Second EditionS M Akash100% (1)
- Ultimate Guide To BPMN enDocument26 pagesUltimate Guide To BPMN enr.koba100% (3)
- Abstractions From Multimedia HardwareDocument5 pagesAbstractions From Multimedia HardwareNiranjan BhattaNo ratings yet
- A-7E Avionics System: A Case Study in Utilizing Architectural StructuresDocument14 pagesA-7E Avionics System: A Case Study in Utilizing Architectural Structuresjckz8No ratings yet
- Instrument Training Course Part - 2Document128 pagesInstrument Training Course Part - 2PATEL ANAND100% (1)
- Difference Between 4 Stroke & 2 Stroke - EngineDocument6 pagesDifference Between 4 Stroke & 2 Stroke - EngineMOAZNo ratings yet
- Autosar BrochureDocument4 pagesAutosar Brochureyanith kumarNo ratings yet
- RIA Experiment 2 - PLC Statement ListDocument7 pagesRIA Experiment 2 - PLC Statement ListleonardoNo ratings yet
- Getting Started - Page 2 - Sap Security PagesDocument31 pagesGetting Started - Page 2 - Sap Security Pagespal singh100% (1)
- Automation For Machining OperationsDocument10 pagesAutomation For Machining OperationsAlemu MergaNo ratings yet
- Fyp DDocument37 pagesFyp Dmalik NajibullahNo ratings yet
- 50 Basic Micro Project Topics For Operating SystemsDocument3 pages50 Basic Micro Project Topics For Operating SystemsSidramappa PotdarNo ratings yet
- Core Java Interview QuestionsDocument44 pagesCore Java Interview QuestionsvidhiNo ratings yet
- Reliabilty of System MCQDocument8 pagesReliabilty of System MCQVardhan Shah0% (1)
- Mini Project ReportDocument46 pagesMini Project ReportAyushi SharmaNo ratings yet
- 01 Student Workbook SA A4 5.0.0.1Document185 pages01 Student Workbook SA A4 5.0.0.1Rajesh KumarNo ratings yet
- How To Use The Global Set/Reset (GSR) SignalDocument20 pagesHow To Use The Global Set/Reset (GSR) SignalLuisa FernandaNo ratings yet