Nema 23
Nema 23
Download as pdf or txt
You might also like
- Fanuc R-J Controller Series Electrical Connection and Maintenance Manual PDFDocument436 pagesFanuc R-J Controller Series Electrical Connection and Maintenance Manual PDFEly100% (1)
- System Dynamics, Third Edition: Using Simscape ™ For Modeling Hydraulic Systems: Dynamics of A Hydraulic Piston and LoadDocument40 pagesSystem Dynamics, Third Edition: Using Simscape ™ For Modeling Hydraulic Systems: Dynamics of A Hydraulic Piston and LoadredwaneNo ratings yet
- Design and Analysis of Industrial Ball Valve Using Computational Fluid DynamicsDocument7 pagesDesign and Analysis of Industrial Ball Valve Using Computational Fluid DynamicsPradeep AdsareNo ratings yet
- YDT IDT 2 Operation ManualDocument22 pagesYDT IDT 2 Operation Manualimansantoso23No ratings yet
- E El 100Document193 pagesE El 100mr_badihi100% (1)
- AG09 - PID Deadband Implementation PDFDocument13 pagesAG09 - PID Deadband Implementation PDFSelva KumarNo ratings yet
- Introduction To Vessel and Vessel OrientationDocument22 pagesIntroduction To Vessel and Vessel OrientationprembindNo ratings yet
- Electrical EngineeringDocument10 pagesElectrical Engineeringapi-302641464No ratings yet
- GERBDocument1 pageGERBdevasshuklaNo ratings yet
- Design of Fixture For Full Bore Gate Valve - ReviewDocument31 pagesDesign of Fixture For Full Bore Gate Valve - ReviewAlpha Ray KingsNo ratings yet
- Actuator: 1 History 2 TypesDocument4 pagesActuator: 1 History 2 TypesPrathyusha RamadurgamNo ratings yet
- 6267 Enquirytechnicalspecification - KnifegatevalveDocument17 pages6267 Enquirytechnicalspecification - KnifegatevalveAnonymous XBq5J84No ratings yet
- Element of Civil Engg.Document15 pagesElement of Civil Engg.Roshan BudhaNo ratings yet
- Me6503 Dme Unit 2 Study Notes 2015Document27 pagesMe6503 Dme Unit 2 Study Notes 2015Bala MuruganNo ratings yet
- 格特威英文样本2018 PDFDocument56 pages格特威英文样本2018 PDFBinxiang XuNo ratings yet
- Steper MotorsDocument23 pagesSteper MotorsAbdulrhmanNo ratings yet
- General Description: Magnet Selection Guide Application NoteDocument15 pagesGeneral Description: Magnet Selection Guide Application NotesekoNo ratings yet
- A ProjectDocument14 pagesA Projectajay0% (1)
- Design of Machine Elements - IDocument69 pagesDesign of Machine Elements - IAnonymous utfuIcnNo ratings yet
- E-Race Car Powertrain Sizing and Simulation in Scilab XcosDocument11 pagesE-Race Car Powertrain Sizing and Simulation in Scilab XcosAbdul MuqtadirNo ratings yet
- CNC Router CalculationsDocument4 pagesCNC Router Calculationsmorteza nourooziNo ratings yet
- Machine ToolspindleunitsDocument22 pagesMachine Toolspindleunitsdevmecz2696No ratings yet
- Galgotias College of Engineering and TechnologyDocument19 pagesGalgotias College of Engineering and TechnologyJv100% (1)
- F7IWTI4IACFOP2T Bike DesignDocument405 pagesF7IWTI4IACFOP2T Bike DesignKoti ReddyNo ratings yet
- Unbalanced Forces and Couples: Balanced Opposed DesignDocument2 pagesUnbalanced Forces and Couples: Balanced Opposed DesignJose Luis RattiaNo ratings yet
- Stepping Motors Brushless Pag 21Document49 pagesStepping Motors Brushless Pag 21Luis R. Cabrales JimenezNo ratings yet
- Coupled Field AnalysisDocument12 pagesCoupled Field AnalysisAnonymous 5pwc6LxvHVNo ratings yet
- Rating Calculation For Plate Heat Exchanger Effectiveness and Pressure Drop Using Existing Performance DataDocument10 pagesRating Calculation For Plate Heat Exchanger Effectiveness and Pressure Drop Using Existing Performance DataFrandhoni UtomoNo ratings yet
- Lecture 3 - Design For Static LoadingDocument42 pagesLecture 3 - Design For Static LoadingM Shoaib AkramNo ratings yet
- Steam Turbines: Prepared by Venkat Chintala Asst. Prof. S.G. Mechanical Engg. Deptt., UPESDocument85 pagesSteam Turbines: Prepared by Venkat Chintala Asst. Prof. S.G. Mechanical Engg. Deptt., UPESRaj NarayanNo ratings yet
- Generative Approach Under Computer Aided Process Planning (Document14 pagesGenerative Approach Under Computer Aided Process Planning (asprillaNo ratings yet
- Design and Fabrication - 1Document11 pagesDesign and Fabrication - 1Adithya Krishna0% (1)
- Analysis and Modification of Screw Jack Body Using Finite Element AnalysisDocument4 pagesAnalysis and Modification of Screw Jack Body Using Finite Element AnalysisIJSTENo ratings yet
- Design & Fabrication of Soft Robotic Gripper For Handling Fragile ObjectsDocument42 pagesDesign & Fabrication of Soft Robotic Gripper For Handling Fragile Objectssaisrini98No ratings yet
- Roller Screw BasicsDocument3 pagesRoller Screw BasicskiranNo ratings yet
- Steam Turbine Rotor Transient Thermo Structural Analysis and Lifetime PredictionDocument8 pagesSteam Turbine Rotor Transient Thermo Structural Analysis and Lifetime PredictionOoi Ban Juan100% (1)
- Torsion BarDocument2 pagesTorsion BardownloadlagumNo ratings yet
- Shaft DeflectionDocument15 pagesShaft Deflectionfreek_jamesNo ratings yet
- Assign I MD IDocument3 pagesAssign I MD IAtharva KNo ratings yet
- 10 - Chapter Foundemental of Flow FormingDocument50 pages10 - Chapter Foundemental of Flow FormingAnonymous 9xvU1F100% (1)
- Capstan and Turret LathesDocument2 pagesCapstan and Turret LathesrsdeshmukhNo ratings yet
- 3.3 9 - Modeling and Simulation of Wear in A Pin On Disc TribometerDocument10 pages3.3 9 - Modeling and Simulation of Wear in A Pin On Disc TribometerDanilo SouzaNo ratings yet
- ASD Vs LRFDDocument107 pagesASD Vs LRFDJuan ZamoraNo ratings yet
- Spring Cylinder Rotary ActuatorDocument12 pagesSpring Cylinder Rotary ActuatorLuis Gustavo Hernandez100% (1)
- Part II - AC MotorsDocument30 pagesPart II - AC MotorsYan Liang HaoNo ratings yet
- Presentation On Wire EdmDocument33 pagesPresentation On Wire EdmArpit HalaniNo ratings yet
- 03b5 - Equipment (Rotating Compressors & Expanders)Document26 pages03b5 - Equipment (Rotating Compressors & Expanders)John Lexmar LeynesNo ratings yet
- Screw Jack TutorialDocument16 pagesScrew Jack TutorialHareesha N GNo ratings yet
- Module No 5b.waves EnergyDocument13 pagesModule No 5b.waves EnergyVaibhav Vithoba Naik100% (1)
- ANSYS Mini ProjectDocument16 pagesANSYS Mini Projectputera_syah_2100% (1)
- P6 Presentation-30-3-2021Document68 pagesP6 Presentation-30-3-2021Moiz MalikNo ratings yet
- Process Equipment Design & Detail EngineeringDocument3 pagesProcess Equipment Design & Detail EngineeringGautam VadnereNo ratings yet
- Consolidation FinalDocument21 pagesConsolidation FinalroaaNo ratings yet
- Flange Coupling Lab PDFDocument25 pagesFlange Coupling Lab PDFAli Raza MalikNo ratings yet
- Interview QuestionsDocument2 pagesInterview Questionsvarshasdm19870% (1)
- Manual CTIDocument206 pagesManual CTIcgrenillon35No ratings yet
- Primavera - BasicsDocument33 pagesPrimavera - BasicsNalini TiwariNo ratings yet
- Cambria Steel A Handbook of Information Relating To Structural Steel 1914Document527 pagesCambria Steel A Handbook of Information Relating To Structural Steel 1914Efe KaranciNo ratings yet
- Centrifugal Clutch Design and EquationsDocument2 pagesCentrifugal Clutch Design and Equationsstallone21No ratings yet
- NEMA Size 17 1.8° 2-Phase Stepper Motor: Quick ReferenceDocument2 pagesNEMA Size 17 1.8° 2-Phase Stepper Motor: Quick ReferenceWill AldasNo ratings yet
- 2 Phase Stepper Motor PDFDocument2 pages2 Phase Stepper Motor PDFArif FaturohmanNo ratings yet
- Transformer: Trivedi Rudra RomeshkumarDocument29 pagesTransformer: Trivedi Rudra RomeshkumarBHUMIKA 9008No ratings yet
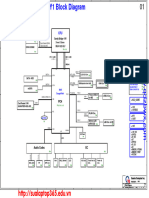
- Toshiba Quanta BY1 INTEL - HR - UMA - C - 1109Document40 pagesToshiba Quanta BY1 INTEL - HR - UMA - C - 1109deppa lannaNo ratings yet
- Makalah Dioda Kel 5Document7 pagesMakalah Dioda Kel 5sara yulidaNo ratings yet
- KUMBHI Industrial Tranning ReportDocument44 pagesKUMBHI Industrial Tranning ReportMonika PatilNo ratings yet
- Neplan v5.5.3Document4 pagesNeplan v5.5.3SDFGHJKNo ratings yet
- Previous Eapcet Physics - QP 29. Semiconductor DevicesDocument22 pagesPrevious Eapcet Physics - QP 29. Semiconductor DevicesRama Mohana Rao BhandaruNo ratings yet
- P810 For Windows - Manual PDFDocument133 pagesP810 For Windows - Manual PDFSiding BarroNo ratings yet
- AresPlusTower LeafletDocument2 pagesAresPlusTower LeafletTRABAJANDIÑO PEREZNo ratings yet
- Weber Aircraft,: East Valencia Drive, P.O. Fullerton, CaliforniaDocument259 pagesWeber Aircraft,: East Valencia Drive, P.O. Fullerton, CaliforniaDaniel ValdiviezoNo ratings yet
- ESR METER - Equivalent Series Resistance Capacitor TesterDocument5 pagesESR METER - Equivalent Series Resistance Capacitor Testerdolbys2001No ratings yet
- Test and Measurement Cat2019 Cat en 5213-7590-42 v0800 120dpiDocument286 pagesTest and Measurement Cat2019 Cat en 5213-7590-42 v0800 120dpicarlosmandopinto100% (1)
- ATmega328P - Instruction Set ManualDocument166 pagesATmega328P - Instruction Set ManualJesús Pérez MorenoNo ratings yet
- Simplex 4120 Network Fire Indicator PanelDocument70 pagesSimplex 4120 Network Fire Indicator Panelj125131No ratings yet
- TNK138C Taneko Industrial Generator (TNK JKT)Document2 pagesTNK138C Taneko Industrial Generator (TNK JKT)Rizki Heru HermawanNo ratings yet
- 041 FWWDocument4 pages041 FWWFausto LojaNo ratings yet
- Air Cylinder: Series A03 COMPACT CYLINDERS MAGNETIC Double Acting (Ø12 - 100) MM FeaturesDocument4 pagesAir Cylinder: Series A03 COMPACT CYLINDERS MAGNETIC Double Acting (Ø12 - 100) MM FeaturesBiswanath LenkaNo ratings yet
- Downloadfile 17Document9 pagesDownloadfile 17Golam ZakariaNo ratings yet
- MDR Selection Guide: ConnectorDocument8 pagesMDR Selection Guide: Connectorbobo69No ratings yet
- Power FlowsDocument42 pagesPower FlowsRaturi DeepankarNo ratings yet
- Saes T 903Document14 pagesSaes T 903Sayed HashemNo ratings yet
- Low-Noise Amplifier Stability Concept To Practical ConsiderationsDocument16 pagesLow-Noise Amplifier Stability Concept To Practical Considerationslabirint10No ratings yet
- 741989Document3 pages741989Indra AminudinNo ratings yet
- Ricoh Aficio MP6500SP Trouble Error CodesDocument48 pagesRicoh Aficio MP6500SP Trouble Error CodesnafeesNo ratings yet
- Chapter 24: Fiber Optics: Multiple ChoiceDocument4 pagesChapter 24: Fiber Optics: Multiple ChoiceAntonio AntonioNo ratings yet
- Digital Electronics - Tutorial #1Document3 pagesDigital Electronics - Tutorial #1Dishawn NationNo ratings yet
- Garbage Base Monitoring System Using IOT ReportDocument42 pagesGarbage Base Monitoring System Using IOT ReportparthNo ratings yet
- Chapter2 MicroprocessorDocument95 pagesChapter2 MicroprocessorsagarNo ratings yet
- 3g Rof GCX Do151g XXXC (CXP Aoc)Document13 pages3g Rof GCX Do151g XXXC (CXP Aoc)cesar020368No ratings yet