GD200 Operation Manual PDF
GD200 Operation Manual PDF
Download as pdf or txt
You might also like
- Instruction Bulletin Hand-Held Test KitDocument12 pagesInstruction Bulletin Hand-Held Test KitJatupol PongsirisartNo ratings yet
- Growatt 7-15k TL3-S User Manual PDFDocument34 pagesGrowatt 7-15k TL3-S User Manual PDFDibyendu MaityNo ratings yet
- Autonics KN 2000W ManualDocument2 pagesAutonics KN 2000W ManualTeknik LasallefoodNo ratings yet
- 7.instal Section PDFDocument25 pages7.instal Section PDFKhắc HuânNo ratings yet
- UBC 1997 Vs SNI 03-1726-2002Document25 pagesUBC 1997 Vs SNI 03-1726-2002Wiratman PasauNo ratings yet
- Sequence Impedances of Overhead Transmission Lines PDFDocument5 pagesSequence Impedances of Overhead Transmission Lines PDFDon BunnagNo ratings yet
- Thermatrac Air-To-Water Heat Pump Water Heater: Key FeaturesDocument8 pagesThermatrac Air-To-Water Heat Pump Water Heater: Key FeaturesFathurrahman Yudhi Nugraha100% (5)
- Water Meter Itron Multimag Katalog ItronDocument4 pagesWater Meter Itron Multimag Katalog ItronGalih WspNo ratings yet
- Pressure Switch DMT02ATEX E019 - Op Manual - Decl of Conf - enDocument6 pagesPressure Switch DMT02ATEX E019 - Op Manual - Decl of Conf - ennemi90No ratings yet
- Suspended & Surface Mounted Luminaires: HDK900 RangeDocument2 pagesSuspended & Surface Mounted Luminaires: HDK900 Rangesihabudin kolyubiNo ratings yet
- Intro To Matv PDFDocument30 pagesIntro To Matv PDFJacob JosephNo ratings yet
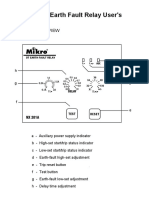
- MIKRO NX201A - Earth Fault Relay User - Manual-1Document4 pagesMIKRO NX201A - Earth Fault Relay User - Manual-1අගනුවර අහිමිකරගත් සිංහලයාNo ratings yet
- Scmflgfif: Switch Combination ToDocument6 pagesScmflgfif: Switch Combination ToJo SarungalloNo ratings yet
- SIKA-Thermometers: Casing 150 X 36 MMDocument1 pageSIKA-Thermometers: Casing 150 X 36 MMgeorgecisNo ratings yet
- Katalog GALA - Gate Valve OSNYDocument1 pageKatalog GALA - Gate Valve OSNYaditNo ratings yet
- Grundfos JPD - PT-22-24 PDFDocument3 pagesGrundfos JPD - PT-22-24 PDFmandahandriNo ratings yet
- AuXiliary Transformer Test ReportDocument2 pagesAuXiliary Transformer Test Reportmuhammad ahsanNo ratings yet
- PERKINS 1000 KvaDocument4 pagesPERKINS 1000 KvaM. Rizky Fauzi100% (1)
- Hooseki Fire AlarmDocument6 pagesHooseki Fire AlarmAgus Mahfudz0% (1)
- (Word) eMG800 - PBX Ericsson LG-12 Co Trunk - 6 Digital - 126 AnalogDocument1 page(Word) eMG800 - PBX Ericsson LG-12 Co Trunk - 6 Digital - 126 AnalogYar MaruliNo ratings yet
- Rig E05tDocument1 pageRig E05talanNo ratings yet
- Singkatan Sebutan JabatanDocument16 pagesSingkatan Sebutan Jabatanronald raigantNo ratings yet
- Wiring Diagram Self Holding + TimerDocument1 pageWiring Diagram Self Holding + TimerDhikaAndhikaNo ratings yet
- Booster VSD Atv 310 2 X 1,5 KWDocument6 pagesBooster VSD Atv 310 2 X 1,5 KWvanesapurnamap100% (1)
- Socla Katalog CZ - 3Document28 pagesSocla Katalog CZ - 3Anugrah Prihantoro Amd TNo ratings yet
- Ah 00212Document17 pagesAh 00212Đặng TrungNo ratings yet
- ATSTORM The Worlds Most Advanced Lightning Warning SystemDocument13 pagesATSTORM The Worlds Most Advanced Lightning Warning SystemToddVoughtNo ratings yet
- 1000 KW Mitsubishi Diesel Generator Set - Non EPA - TP-M1000-T1-60 PDFDocument5 pages1000 KW Mitsubishi Diesel Generator Set - Non EPA - TP-M1000-T1-60 PDFViệt Đặng XuânNo ratings yet
- System Features: Floor StandingDocument1 pageSystem Features: Floor StandingKevin Lau100% (1)
- HCPDocument12 pagesHCPAhmedNo ratings yet
- THERA TMEX503 ES Modbus GatewayDocument1 pageTHERA TMEX503 ES Modbus GatewayAbdul Reza RahmanNo ratings yet
- Matrix Intertrip - Kuaro Line 2 RevDocument5 pagesMatrix Intertrip - Kuaro Line 2 RevChomsaniNo ratings yet
- Brosur Fitting FKKDocument2 pagesBrosur Fitting FKKProc MasterNo ratings yet
- Legrand Main Price List April 2023Document268 pagesLegrand Main Price List April 2023anuvindanuvindNo ratings yet
- Rab Pt. FRL Kap. 20 T (Versi - 1)Document6 pagesRab Pt. FRL Kap. 20 T (Versi - 1)rilo prihatenNo ratings yet
- Do 9100 Dissolved Oxygen Meter With Electrode Filling Fluid ManualDocument6 pagesDo 9100 Dissolved Oxygen Meter With Electrode Filling Fluid Manualbioemil86No ratings yet
- Katalog MCCB PDFDocument74 pagesKatalog MCCB PDFHosea LuahambowoNo ratings yet
- ME Wiring Diagram Panel SDP 3 & 4Document1 pageME Wiring Diagram Panel SDP 3 & 4Dewa SuciartaNo ratings yet
- Thcall Operation RW-ST01D and RW-GT01DDocument2 pagesThcall Operation RW-ST01D and RW-GT01Dpain2905No ratings yet
- Interface Guidelines Document (IGD) by Product v6 83 2015-01-19Document849 pagesInterface Guidelines Document (IGD) by Product v6 83 2015-01-19Corovei EmiliaNo ratings yet
- Fire Alarm Testing ReportDocument22 pagesFire Alarm Testing Reportmink jumperNo ratings yet
- Tower Drawing 100 FeetDocument3 pagesTower Drawing 100 FeetMian M Khurram100% (3)
- WW-MFR2 (Multifunction Relay)Document4 pagesWW-MFR2 (Multifunction Relay)KT MENONNo ratings yet
- Belajar Baca SLDDocument2 pagesBelajar Baca SLDFarid Ahmad ShalahuddinNo ratings yet
- ASENWARE AW-D302 Addressable Heat Detector Date SheetDocument1 pageASENWARE AW-D302 Addressable Heat Detector Date SheetMasudParvezSajibNo ratings yet
- EGA Pipa ConduitDocument2 pagesEGA Pipa ConduitDerahamaniNo ratings yet
- Drain Pump InstallationDocument8 pagesDrain Pump InstallationSkill IndiaNo ratings yet
- GSC 125-95 - 750GPM110MDocument1 pageGSC 125-95 - 750GPM110MJwardNo ratings yet
- Spare Part Turbin PLTA Bengkok PDFDocument1 pageSpare Part Turbin PLTA Bengkok PDFAditya PrajasNo ratings yet
- Sensor de FlujoDocument2 pagesSensor de FlujoDany Chl100% (1)
- TECSIS Pressure TransmitterDocument4 pagesTECSIS Pressure TransmitterVijendraAgarNo ratings yet
- PML-AML Pertamina Subholding Upstream-2Document97 pagesPML-AML Pertamina Subholding Upstream-2Hafiz FebrianaNo ratings yet
- Legrand Niloe Stop Kontak SaklarDocument24 pagesLegrand Niloe Stop Kontak SaklarAlfiansyah Dharma Setia DjaketraNo ratings yet
- 01a - Access Road TE04 - Schedule of PriceDocument3 pages01a - Access Road TE04 - Schedule of PriceAsep FirmansyahNo ratings yet
- TD-W8961N V1 Datasheet PDFDocument3 pagesTD-W8961N V1 Datasheet PDFRomadi AhmadNo ratings yet
- IQ Range: Installation and Maintenance InstructionsDocument88 pagesIQ Range: Installation and Maintenance InstructionsmaituanNo ratings yet
- Pipa Tembaga - Streamline MuellerDocument8 pagesPipa Tembaga - Streamline MuellerAhmad Syaifudin ZNo ratings yet
- Rab Conveyor SMKDocument2 pagesRab Conveyor SMKkurniadi lismanNo ratings yet
- AP3064Document13 pagesAP3064José CalzadillaNo ratings yet
- Form Pengukuran Elektrikal Dan TorsiDocument2 pagesForm Pengukuran Elektrikal Dan TorsiBarlian Caxica PristyNo ratings yet
- GD200A Manual EnglishDocument269 pagesGD200A Manual Englishtran dieuNo ratings yet
- GD300 Operation Manual PDFDocument299 pagesGD300 Operation Manual PDFBalaram pattanayak100% (1)
- Section 55 - Electrical System - Chapter 2: Error CodesDocument13 pagesSection 55 - Electrical System - Chapter 2: Error CodesJózsef JuhászNo ratings yet
- Scope: Acceptance & Maintenance RequirementsDocument23 pagesScope: Acceptance & Maintenance RequirementsGary CudalNo ratings yet
- Abb VariadorDocument52 pagesAbb VariadorPa TricioNo ratings yet
- Short-Circuit Current Calculations: Basic Point-to-Point Calculation ProcedureDocument1 pageShort-Circuit Current Calculations: Basic Point-to-Point Calculation Procedurebalbeloanna7No ratings yet
- CoCU 4Document13 pagesCoCU 4AmeenNo ratings yet
- CS3000 Service v6 E5 09 1 EDocument83 pagesCS3000 Service v6 E5 09 1 EHarman SandhuNo ratings yet
- Alternator Protection Module: SpecificationDocument2 pagesAlternator Protection Module: SpecificationVictor Manuel Santana OmañaNo ratings yet
- Iec62031 (Ed2 0) enDocument22 pagesIec62031 (Ed2 0) enRUBENS ROSADONo ratings yet
- 1VDD006104 Catalogue SR-SP-12-24 EN 06-2021Document128 pages1VDD006104 Catalogue SR-SP-12-24 EN 06-2021ArturNo ratings yet
- CSE - 33 Touch Voltage Measurements New Approach For Measurements On Lines in ServiceDocument16 pagesCSE - 33 Touch Voltage Measurements New Approach For Measurements On Lines in ServicebenlahnecheNo ratings yet
- Volvo 47705930 - UsDocument234 pagesVolvo 47705930 - UsCui71% (7)
- Unit 4 MEEDocument23 pagesUnit 4 MEEdipak1980No ratings yet
- T.E. (Electrical Engineering) : Shivaji University, KolhapurDocument41 pagesT.E. (Electrical Engineering) : Shivaji University, KolhapurLawson SangoNo ratings yet
- Line Differential ProtectionDocument7 pagesLine Differential Protectionpradeep.spacemanNo ratings yet
- Unit IV Distribution System ProtectionDocument9 pagesUnit IV Distribution System Protection23f1002933No ratings yet
- Programmable Load Sheding ManagemementDocument6 pagesProgrammable Load Sheding ManagemementscribsunilNo ratings yet
- Review of Networked Microgrid Protection Architectures Challenges Solutions and Future TrendsDocument20 pagesReview of Networked Microgrid Protection Architectures Challenges Solutions and Future TrendsmoraejNo ratings yet
- 3.5.4. Directional Definite Time Overcurrent Protection (Dircurrentdt)Document7 pages3.5.4. Directional Definite Time Overcurrent Protection (Dircurrentdt)Alex asherNo ratings yet
- Electrical Design AnalysisDocument8 pagesElectrical Design Analysismaria cristina santos67% (3)
- Grid Disturbances GuidelinesDocument75 pagesGrid Disturbances GuidelinesBilal EjazNo ratings yet
- 1mrk507004-Uen B en Radhl User S GuideDocument40 pages1mrk507004-Uen B en Radhl User S Guideali surfNo ratings yet
- Tier3 ElectricDocument10 pagesTier3 ElectricLuong Nguyen Danh100% (1)
- Drawing Issues TrackingDocument9 pagesDrawing Issues TrackingSoth MesaNo ratings yet
- Step and Touch Voltage CriteriaDocument11 pagesStep and Touch Voltage CriteriaMuhammad Asif IqbalNo ratings yet
- Single Core Cable Bonding Methodology in Electrical (Petrochemical) IndustriesDocument11 pagesSingle Core Cable Bonding Methodology in Electrical (Petrochemical) Industriesbieito1968No ratings yet
- Relay Setting CalculationDocument6 pagesRelay Setting CalculationSaurabh Kumar Singh100% (6)
- Power System Switchgear and Protection (EET-301) : Reference Books AuthorsDocument20 pagesPower System Switchgear and Protection (EET-301) : Reference Books AuthorsAnuja TipareNo ratings yet
- SectionalizersDocument30 pagesSectionalizersNoel DegonesNo ratings yet