Torsion Test
Torsion Test
Download as docx, pdf, or txt
You might also like
- Valve Lash For Cummins Engine K38Document9 pagesValve Lash For Cummins Engine K38Youssef Ali100% (3)
- Steel Lab ReportDocument14 pagesSteel Lab ReportDavid StamenovNo ratings yet
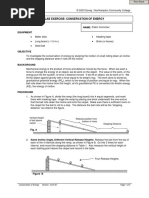
- Lab Exercise: Conservation of Energy: NameDocument5 pagesLab Exercise: Conservation of Energy: NameJackie McCarthyNo ratings yet
- Modulus of RigidityDocument5 pagesModulus of RigidityMuhammad Talha Sajid Muhammad Sajidullah100% (1)
- Shear ForceDocument14 pagesShear ForceQayyum Uzear Usin100% (1)
- Beam Reaction Experiment Group 2Document22 pagesBeam Reaction Experiment Group 2AnushaBheenuck100% (1)
- Material LaboratoryDocument14 pagesMaterial LaboratoryAnonymous tLXKwTNo ratings yet
- Structural Mechanics Lab ReportDocument31 pagesStructural Mechanics Lab Reportmalicat alwroodNo ratings yet
- SEP291 - T1 2021 - Assignment 2 - QuestionsDocument3 pagesSEP291 - T1 2021 - Assignment 2 - QuestionsPawandeep SinghNo ratings yet
- Plastic Bending of Portals-MIET1071-2012Document13 pagesPlastic Bending of Portals-MIET1071-2012James WrightNo ratings yet
- Cantilever Flex ExperimentDocument8 pagesCantilever Flex ExperimentJhonattan PardoNo ratings yet
- Lab 321 #1 VVVDocument12 pagesLab 321 #1 VVVSamNo ratings yet
- Lab 4 Impact of Jet Sem 2 20202021Document11 pagesLab 4 Impact of Jet Sem 2 20202021gorillaz incNo ratings yet
- Ace of Spades + Outlaw 125 2019Document85 pagesAce of Spades + Outlaw 125 2019Nelson RodrigoNo ratings yet
- Company Profiles Book - IsraelDocument249 pagesCompany Profiles Book - IsraelAshish LoyaNo ratings yet
- FCPC NotesDocument147 pagesFCPC Notesspeed_a5987100% (1)
- Mechanics of Materials - Column Buckling TestDocument13 pagesMechanics of Materials - Column Buckling TestDavid Clark93% (14)
- Fluid Mechanics Sessional CE 262Document28 pagesFluid Mechanics Sessional CE 262মোঃমেহেদী হাসান শরীফNo ratings yet
- CE 233 FM Lab Fall 2019 Lab ManualDocument42 pagesCE 233 FM Lab Fall 2019 Lab ManualRavi RajNo ratings yet
- Lab 6 - Experiment On BeamDocument6 pagesLab 6 - Experiment On BeamAin SyahiraNo ratings yet
- Experiment - Three Hinge ArchDocument4 pagesExperiment - Three Hinge ArchAmeera AlexandraNo ratings yet
- Beam Deflection ManualDocument10 pagesBeam Deflection ManualwahtoiNo ratings yet
- CEWB21 Exp 4 Full ReportDocument9 pagesCEWB21 Exp 4 Full ReportNur FarehaNo ratings yet
- Exp.5 - Helical SpringDocument7 pagesExp.5 - Helical SpringG. Dancer GhNo ratings yet
- Chapter-1: Introduction To Dynamics Mechanics As The Origin of DynamicsDocument92 pagesChapter-1: Introduction To Dynamics Mechanics As The Origin of DynamicsRoutine Of Nepal BandaNo ratings yet
- Exp. Suspended BeamDocument4 pagesExp. Suspended BeamsajjadNo ratings yet
- MOS Lab Manual - NewDocument41 pagesMOS Lab Manual - NewPavan Kalyan SuryavamshiNo ratings yet
- Iitkgp or PapersDocument22 pagesIitkgp or PapersRitam DuttNo ratings yet
- Experiment - 2Document2 pagesExperiment - 2Pradyot DeoliaNo ratings yet
- Report 2Document11 pagesReport 2Shaheer RizwanNo ratings yet
- Factors Influencing Hydraulic Phenomena: Inertia Force, Mass AccelerationDocument13 pagesFactors Influencing Hydraulic Phenomena: Inertia Force, Mass AccelerationBin IqbalNo ratings yet
- Testing of Adhesive Joints in The Wind Industry: AbstractDocument10 pagesTesting of Adhesive Joints in The Wind Industry: AbstractL.a. MayorNo ratings yet
- EXPERIMENT HydrostaticDocument7 pagesEXPERIMENT HydrostaticinhinyeroNo ratings yet
- Properties of Fluids NotesDocument14 pagesProperties of Fluids NotesMavineNo ratings yet
- Rate of Flow or DischargeDocument6 pagesRate of Flow or DischargeEuchariaNo ratings yet
- CHAPTER 2 Theory of Plates and ShellsDocument58 pagesCHAPTER 2 Theory of Plates and ShellsRamzi Bouba100% (1)
- Consolidation LabDocument5 pagesConsolidation LabfostbarrNo ratings yet
- Orifice and Jet Flow (HB 019)Document12 pagesOrifice and Jet Flow (HB 019)Usman AliNo ratings yet
- Experimentno. 1 Determinationof State of Flow and Critical Depth in Open ChannelDocument5 pagesExperimentno. 1 Determinationof State of Flow and Critical Depth in Open ChannelAlamin HosainNo ratings yet
- Bending MomentDocument30 pagesBending MomentMuhammad ImranNo ratings yet
- Rigid Body EquilibriumDocument13 pagesRigid Body EquilibriumJerome Whyte0% (1)
- Resultant and Equilibrant Forces Experiment No. 4Document3 pagesResultant and Equilibrant Forces Experiment No. 4Kevin TuringanNo ratings yet
- Experiment 3: Metacentric HeightDocument12 pagesExperiment 3: Metacentric HeightYanskie JusainNo ratings yet
- OBJ + CONCLUSION BeltDocument1 pageOBJ + CONCLUSION BeltFattihiEkhmalNo ratings yet
- EXP 5 TorsionDocument18 pagesEXP 5 TorsionYagami KirigayaNo ratings yet
- 6 CE 414 UnitHG ExamplesDocument7 pages6 CE 414 UnitHG ExamplesWaseemz ShahNo ratings yet
- Calibration of Contracted Rectangular WeirDocument9 pagesCalibration of Contracted Rectangular WeirDianne Ilao LondobNo ratings yet
- MEC424 Content TorsionDocument12 pagesMEC424 Content TorsionHaFiy HaZimNo ratings yet
- 1.0 Job/Experiment No.: Me594/05 2.0 NAME OF EXPERIMENT: Angle Measurement Using Sine Bar & SlipDocument6 pages1.0 Job/Experiment No.: Me594/05 2.0 NAME OF EXPERIMENT: Angle Measurement Using Sine Bar & SlipHimanshu Vasistha0% (1)
- Static FrictionDocument6 pagesStatic FrictionRajuKumarNo ratings yet
- Experiment No. 8 " ": To Verify The Laws of Shearing Force and Bending Moments On A BeamDocument8 pagesExperiment No. 8 " ": To Verify The Laws of Shearing Force and Bending Moments On A BeamHasnain ButtNo ratings yet
- Cite Two Reasons Why Interstitial Diffusion Is Normally More Rapid Than Vacancy DiffusionDocument19 pagesCite Two Reasons Why Interstitial Diffusion Is Normally More Rapid Than Vacancy Diffusion严定舜No ratings yet
- Hydraulics Engineering Lec #1:: Specific Energy and Critical DepthDocument20 pagesHydraulics Engineering Lec #1:: Specific Energy and Critical Deptharfa wainceNo ratings yet
- eXPERIMENT NO 06 FMDocument9 pageseXPERIMENT NO 06 FMAsim Bajwa100% (1)
- Moment of Inertia of A FlywheelDocument5 pagesMoment of Inertia of A FlywheelRajaswi BeleNo ratings yet
- MM103 Lab 4Document4 pagesMM103 Lab 4Shivneel SwamyNo ratings yet
- 2 Peg Test ReportDocument4 pages2 Peg Test ReportIzzul ZikriNo ratings yet
- Lab Report 1Document8 pagesLab Report 1Iv ChenNo ratings yet
- Determination of Friction Factor of Pipe Lines: Al Habeeb College of Engineering & TechnologyDocument3 pagesDetermination of Friction Factor of Pipe Lines: Al Habeeb College of Engineering & TechnologyAsrar UddinNo ratings yet
- Introductory Applications of Partial Differential Equations: With Emphasis on Wave Propagation and DiffusionFrom EverandIntroductory Applications of Partial Differential Equations: With Emphasis on Wave Propagation and DiffusionNo ratings yet
- Numerical Methods and Implementation in Geotechnical Engineering – Part 1From EverandNumerical Methods and Implementation in Geotechnical Engineering – Part 1No ratings yet
- 1 - What Are The Elastic Constants ?Document27 pages1 - What Are The Elastic Constants ?Aliaa ELshabsheryNo ratings yet
- MD1 Topic 1 Simple StressesDocument8 pagesMD1 Topic 1 Simple StressesIvan Jeremy AbilaNo ratings yet
- Graph of Stress (Mpa) Versus Strain (Steel)Document3 pagesGraph of Stress (Mpa) Versus Strain (Steel)ilya danisyahNo ratings yet
- Tutorial Fastener Sesi Mac 2020Document4 pagesTutorial Fastener Sesi Mac 2020ilya danisyahNo ratings yet
- Full of Example Guys!!!!! Heheheheh: Chapter 4: Flow in Pipes Example #1Document6 pagesFull of Example Guys!!!!! Heheheheh: Chapter 4: Flow in Pipes Example #1ilya danisyahNo ratings yet
- Ohardness Test: 1. ObjectiveDocument9 pagesOhardness Test: 1. Objectiveilya danisyahNo ratings yet
- Ilya Danisyah Binti Azman 2018279272: Lightning Arrestor TechnologiesDocument4 pagesIlya Danisyah Binti Azman 2018279272: Lightning Arrestor Technologiesilya danisyahNo ratings yet
- Ilya Danisyah Binti Azman 2018279272: Lightning Arrestor TechnologiesDocument4 pagesIlya Danisyah Binti Azman 2018279272: Lightning Arrestor Technologiesilya danisyahNo ratings yet
- Ilya Danisyah Binti Azman 2018279272: Lightning Arrestor TechnologiesDocument4 pagesIlya Danisyah Binti Azman 2018279272: Lightning Arrestor Technologiesilya danisyahNo ratings yet
- The Effect of Heat Treatment On The Microstructure of SteelDocument9 pagesThe Effect of Heat Treatment On The Microstructure of Steelilya danisyahNo ratings yet
- Datasheet STS Huawei 6000K-H1 For 200-215KTLDocument2 pagesDatasheet STS Huawei 6000K-H1 For 200-215KTLTitoNo ratings yet
- L900 BDocument42 pagesL900 Bheartofdixie100% (1)
- Demand Side Data and Energy Efficiency IDocument102 pagesDemand Side Data and Energy Efficiency IGerencia Mantenimiento IntegralNo ratings yet
- Geothermal & Waterwell DrillingDocument4 pagesGeothermal & Waterwell DrillingLuthfi Anandhika100% (1)
- Lasers in Dermatological Practice PDF UnitedvrgDocument574 pagesLasers in Dermatological Practice PDF Unitedvrgблогер бро100% (2)
- Role of Cultural MillieuDocument20 pagesRole of Cultural MillieuBeatriz SantiagoNo ratings yet
- Polyethylene Lotrene Ldpe & Lldpe: 1.1. Product IdentifierDocument8 pagesPolyethylene Lotrene Ldpe & Lldpe: 1.1. Product IdentifierlyesNo ratings yet
- Mole CalculationsDocument30 pagesMole CalculationsG M Ali KawsarNo ratings yet
- Copper Press Fittings: CatalogDocument28 pagesCopper Press Fittings: CatalogSiddiqui Muhammad AshfaqueNo ratings yet
- Motor KubotaDocument74 pagesMotor KubotaGermán100% (6)
- Module 1 - IntroductionDocument7 pagesModule 1 - IntroductionFidhez TanNo ratings yet
- 4 Steps To Convert 230V AC To 5V DCDocument3 pages4 Steps To Convert 230V AC To 5V DCbiswa2170% (1)
- Port and Logi Stics: MR - Jelly R.Goni Managing DirectorDocument1 pagePort and Logi Stics: MR - Jelly R.Goni Managing Directorapi-55220049No ratings yet
- D-M Catalogue 2019 v35Document120 pagesD-M Catalogue 2019 v35sreeramu100% (1)
- SHR ReportDocument42 pagesSHR Reportanon_551879060No ratings yet
- Phase Sequence Relay 800PSR: FeaturesDocument1 pagePhase Sequence Relay 800PSR: FeaturesAkmal DarmawanNo ratings yet
- CounductometryDocument13 pagesCounductometryK.R. PrasadNo ratings yet
- Corradi Et Al. (2013) - Oops, I Forgot The Light OnDocument9 pagesCorradi Et Al. (2013) - Oops, I Forgot The Light OnRoz KrakraNo ratings yet
- FMDS0621Document31 pagesFMDS0621horace chenNo ratings yet
- Specifications & Electric Cooling Fans Article TextDocument3 pagesSpecifications & Electric Cooling Fans Article TextGatis IvbulisNo ratings yet
- NGP029 Exhaust Products CatalogDocument108 pagesNGP029 Exhaust Products CatalogAndres PachecoNo ratings yet
- Chemistry 1103: Dr. Jhon Zapata RiveraDocument37 pagesChemistry 1103: Dr. Jhon Zapata RiveraJuliRoGamer YtNo ratings yet
- Pre 11 FM ModDocument16 pagesPre 11 FM ModJameel BenavidezNo ratings yet
- .Chapter 3Document21 pages.Chapter 3Santhosh VelanNo ratings yet
- Budgeted Lesson Physical ScienceDocument9 pagesBudgeted Lesson Physical Sciencearies mandy flores100% (1)
- CEG Galaxy Vesel DiscriptionDocument3 pagesCEG Galaxy Vesel DiscriptionStepan KlashevychNo ratings yet