Mec30 Lecture
Mec30 Lecture
Download as pdf or txt
You might also like
- Engineering Utilities Module 1Document42 pagesEngineering Utilities Module 1Dean Ackles78% (18)
- Ce141-2 Course SyllabusDocument4 pagesCe141-2 Course SyllabusDean AcklesNo ratings yet
- MG1 - L7 - C.7 - PDFedDocument27 pagesMG1 - L7 - C.7 - PDFedBreno PalluNo ratings yet
- Solution PRELIM STHEORY 2020-2021 PDFDocument22 pagesSolution PRELIM STHEORY 2020-2021 PDFErick MangalinoNo ratings yet
- Rect Comp 2dDocument39 pagesRect Comp 2dLin Xian XingNo ratings yet
- Ready Check FOR Highway Plan8J: Project 2Document11 pagesReady Check FOR Highway Plan8J: Project 2Martirez, Princess Mirah V.No ratings yet
- RCD SA2 GuideDocument11 pagesRCD SA2 GuideDionne Rhenzo MontalesNo ratings yet
- Live Load ExampleDocument6 pagesLive Load ExampletrabajosicNo ratings yet
- TRANSCRIPTDocument37 pagesTRANSCRIPTGiemhel GeleraNo ratings yet
- Ce234 Topic 09-10Document58 pagesCe234 Topic 09-10Nicholas Bonn SingNo ratings yet
- CM 2 Ceemec30 PDFDocument63 pagesCM 2 Ceemec30 PDFenel eneruNo ratings yet
- Chapter 12Document8 pagesChapter 12이희인No ratings yet
- Engineering Economy With AnswersDocument3 pagesEngineering Economy With Answersdridgely ric c. dyNo ratings yet
- Chapter 6-Dynamics-Kinematics-KineticsDocument36 pagesChapter 6-Dynamics-Kinematics-KineticsO.SNo ratings yet
- Lec 03, Rectangular Components of ForceDocument21 pagesLec 03, Rectangular Components of ForceAli Raza100% (1)
- Doubly Reinforced Concrete BeamsDocument14 pagesDoubly Reinforced Concrete BeamsAllysa Joy MoralesNo ratings yet
- Fluids PDF Part 3Document22 pagesFluids PDF Part 3DELOS SANTOS GERALDNo ratings yet
- Analysis of Gravity of DamsDocument6 pagesAnalysis of Gravity of DamsJustine Gooc VelardeNo ratings yet
- Set 7 Fluid Properties and Hydrostatic ForceDocument12 pagesSet 7 Fluid Properties and Hydrostatic ForceChristine TabangNo ratings yet
- Polytechnic University of The Philippines: ENSC 20043 Statics of Rigid Bodies Quiz 2Document3 pagesPolytechnic University of The Philippines: ENSC 20043 Statics of Rigid Bodies Quiz 2acurvz2005No ratings yet
- Tutorial 1Document2 pagesTutorial 1Eddy FazwanNo ratings yet
- Lec4Statics Moment of A Forcepptx 1Document54 pagesLec4Statics Moment of A Forcepptx 1Jared RoseNo ratings yet
- Module 3 and 5 PDFDocument55 pagesModule 3 and 5 PDFSaptadip SahaNo ratings yet
- MCQs in Engineering Mathematics Part 10Document12 pagesMCQs in Engineering Mathematics Part 10Richster LofrancoNo ratings yet
- 03 Trusses PDFDocument58 pages03 Trusses PDFhalder_kalyan9216No ratings yet
- TRUSSESDocument17 pagesTRUSSESMohamedDarwishNo ratings yet
- Experiment No. 2 Familiarization of Hydraulic Bench ApparatusDocument5 pagesExperiment No. 2 Familiarization of Hydraulic Bench ApparatusMr. Mark B.No ratings yet
- Solution To Problem 613 - Double Integration Method - Strength of Materials Review at MATHalinoDocument4 pagesSolution To Problem 613 - Double Integration Method - Strength of Materials Review at MATHalinoMd.matiur RahmanNo ratings yet
- Topic 6 - Vertical Parabolic Curves (Symmetrical)Document4 pagesTopic 6 - Vertical Parabolic Curves (Symmetrical)Nicholas Bonn SingNo ratings yet
- CE 2016 Fluid MechanicsDocument26 pagesCE 2016 Fluid MechanicsKyaw Zin HeinNo ratings yet
- Dynamics: Absolute Dependent MotionDocument23 pagesDynamics: Absolute Dependent Motionshaweeeng 101No ratings yet
- Factor UDocument1 pageFactor UseaedoNo ratings yet
- 7-Practice Problem I - SolutionsDocument41 pages7-Practice Problem I - SolutionsNina Ysabelle RamosNo ratings yet
- Chapter IV Shear and Moment in Beams 4.4Document6 pagesChapter IV Shear and Moment in Beams 4.4Joshua John JulioNo ratings yet
- Inbound 3992942547861628169Document13 pagesInbound 3992942547861628169keepersilent2No ratings yet
- De La Pena, Mary Princess C. BSME-3C-Engineering EconomyDocument6 pagesDe La Pena, Mary Princess C. BSME-3C-Engineering EconomyJohn A. CenizaNo ratings yet
- Simple Interest, Compound Interest, Annuities, & CapitalizationDocument10 pagesSimple Interest, Compound Interest, Annuities, & CapitalizationJovin BallesterosNo ratings yet
- Statics of Rigid BodiesDocument15 pagesStatics of Rigid BodiesKhawaz HossainNo ratings yet
- 2 MEC32-1 REVIEW OF MEC30 (Robles)Document16 pages2 MEC32-1 REVIEW OF MEC30 (Robles)John BurnsideNo ratings yet
- Module 4.permeability and SeepageDocument34 pagesModule 4.permeability and Seepagejesica quijanoNo ratings yet
- Fluids Exp 2Document9 pagesFluids Exp 2Ely ReyesNo ratings yet
- COPLANAR EQUILIBRIUM ANALYSIS Single and Composite BodiesDocument49 pagesCOPLANAR EQUILIBRIUM ANALYSIS Single and Composite Bodiesjoemer cabayaoNo ratings yet
- Statics Problems PDFDocument21 pagesStatics Problems PDFClarence Jay AcaylarNo ratings yet
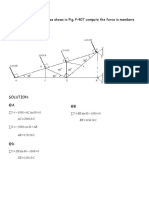
- in The Cantilever Truss Shown in Fig. P-407 Compute The Force in Members AB, BE, and DE. FIGURE P-407Document14 pagesin The Cantilever Truss Shown in Fig. P-407 Compute The Force in Members AB, BE, and DE. FIGURE P-407ceelynNo ratings yet
- Internal Resistance AppliedDocument11 pagesInternal Resistance AppliedJoshua BacunawaNo ratings yet
- Module 3. Axially Loaded Compression MembersDocument25 pagesModule 3. Axially Loaded Compression Membersxppen78No ratings yet
- Hydrostatic Forces On A Curved SurfaceDocument6 pagesHydrostatic Forces On A Curved SurfaceaadhanNo ratings yet
- Chapter 6 NodosDocument35 pagesChapter 6 NodosMaria Alejandra ObandoNo ratings yet
- P7 3B Bernardo KathryneDocument4 pagesP7 3B Bernardo KathryneKATHRYNE BERNARDONo ratings yet
- Structural Theory 1 (Moment Area Method)Document38 pagesStructural Theory 1 (Moment Area Method)acurvz2005No ratings yet
- Dynamics ProblemDocument2 pagesDynamics ProblemJp Desc33% (3)
- Steel Structures-Lecture 5 PDFDocument23 pagesSteel Structures-Lecture 5 PDFAli FarooqNo ratings yet
- C-SA2-Three Moment Equations MethodDocument34 pagesC-SA2-Three Moment Equations Methodeid ibrahimNo ratings yet
- NUt 6 SA9 SSN 65Document38 pagesNUt 6 SA9 SSN 65Don RomantikoNo ratings yet
- Engineering Economy Course Student 4Document27 pagesEngineering Economy Course Student 4Baesl 2000No ratings yet
- Consmat Lab Manual 2016 PDFDocument57 pagesConsmat Lab Manual 2016 PDFAngelito RamosNo ratings yet
- Beam DeflectionDocument4 pagesBeam DeflectionOuch PainNo ratings yet
- Chapter 3 - Equilibrium of Force SystemsDocument55 pagesChapter 3 - Equilibrium of Force Systemsforojaypee2002No ratings yet
- Lecture 4 Rigid BodiesDocument75 pagesLecture 4 Rigid Bodiessysybituin27No ratings yet
- Statics of Rigid Bodies: Engineering MechanicsDocument35 pagesStatics of Rigid Bodies: Engineering MechanicsJoylyn BeranNo ratings yet
- Equilibrium of Force SystemsDocument14 pagesEquilibrium of Force SystemsRocel Marie Lopez100% (1)
- Ee114-1 Course SyllabusDocument6 pagesEe114-1 Course SyllabusDean AcklesNo ratings yet
- Hydrology LectureDocument1 pageHydrology LectureDean AcklesNo ratings yet
- Ce133-2p SyllabusDocument6 pagesCe133-2p SyllabusDean AcklesNo ratings yet
- Math156 - LQ2 Practice TestDocument1 pageMath156 - LQ2 Practice TestDean AcklesNo ratings yet
- Rounding Numbers Up To Hundred Thousands Worksheet 1Document2 pagesRounding Numbers Up To Hundred Thousands Worksheet 1Jr ArandedNo ratings yet
- Ansys Capabilities Chart 2020 r1 v2 PDFDocument59 pagesAnsys Capabilities Chart 2020 r1 v2 PDFAmit NirmalNo ratings yet
- A Course in The Theory of Groups, Derek J. S. Robinson.1Document498 pagesA Course in The Theory of Groups, Derek J. S. Robinson.1georgetacaprarescuNo ratings yet
- Conversational Japanese For Beginners 1000881670 PDFDocument406 pagesConversational Japanese For Beginners 1000881670 PDFFelipe Padilla MuñozNo ratings yet
- CSE408 Vertex Cover and Bin PackingDocument19 pagesCSE408 Vertex Cover and Bin Packingabcxyz19691969No ratings yet
- TD1007 Water To Air DatasheetDocument3 pagesTD1007 Water To Air DatasheetMustapha AlaouiNo ratings yet
- Grade 12 A&B Term 1 Study GuideDocument2 pagesGrade 12 A&B Term 1 Study Guideᴘʀᴏғ. HammadNo ratings yet
- Online Shopping Sales Infographics by SlidesgoDocument6 pagesOnline Shopping Sales Infographics by SlidesgoLohith AnjaanNo ratings yet
- Neil WhiteheadDocument416 pagesNeil WhiteheadRaul Rodriguez ArancibiaNo ratings yet
- FLC ProcessDocument20 pagesFLC ProcesswtwilightwNo ratings yet
- WINSEM2020-21 EEE4033 ETH VL2020210501456 Reference Material I 03-Feb-2021 MODULE-I Lecture 1Document76 pagesWINSEM2020-21 EEE4033 ETH VL2020210501456 Reference Material I 03-Feb-2021 MODULE-I Lecture 1appu KandathilNo ratings yet
- Materi Dan Soal Explanation TextDocument9 pagesMateri Dan Soal Explanation TextcheeryNo ratings yet
- Tổng Hợp Đề Speaking Part 3 ĐỀ 1: Parents are the best teachersDocument5 pagesTổng Hợp Đề Speaking Part 3 ĐỀ 1: Parents are the best teachersHoàng ThiênNo ratings yet
- BjujDocument3 pagesBjujPrajwal ShettyNo ratings yet
- Ranga's Marriage (Class XI)Document2 pagesRanga's Marriage (Class XI)AyushNo ratings yet
- Horizontal Well TechnologyDocument1 pageHorizontal Well TechnologyadityamduttaNo ratings yet
- Danielsson Financial Risk Forecasting Slides 2 - 1 41Document41 pagesDanielsson Financial Risk Forecasting Slides 2 - 1 41mutosya672No ratings yet
- Agricultural Transformation and Rural Development - Todaro 1Document26 pagesAgricultural Transformation and Rural Development - Todaro 1Rizki SaputraNo ratings yet
- Hilario-Marvin S - FS2 - E-Portfolio-FinalDocument48 pagesHilario-Marvin S - FS2 - E-Portfolio-FinalMARVIN HILARIONo ratings yet
- Mill Certificate: 2 2 2 3 3 3 4 N/mm2 N/mm2 % x10 x10 x10 x10 x10 x10 x10Document1 pageMill Certificate: 2 2 2 3 3 3 4 N/mm2 N/mm2 % x10 x10 x10 x10 x10 x10 x10Binh Hung OngNo ratings yet
- Air Purgr Level Indicator Experimental ManualDocument8 pagesAir Purgr Level Indicator Experimental ManualShoaib PathanNo ratings yet
- Get The Analysis of Biological Data Third Edition Whitlock PDF Full ChapterDocument24 pagesGet The Analysis of Biological Data Third Edition Whitlock PDF Full Chapteralmunanghi100% (6)
- Cosarca Onose Savu Negrila EngDocument8 pagesCosarca Onose Savu Negrila EngGammaz1973No ratings yet
- Revised SHDP Foundation OpeningProgram Sept 21Document46 pagesRevised SHDP Foundation OpeningProgram Sept 21Jessie James YapaoNo ratings yet
- Electronic Devices & Circuits: UNIT-4Document22 pagesElectronic Devices & Circuits: UNIT-40fficial SidharthaNo ratings yet
- 9709 s06 QP 6 PDFDocument4 pages9709 s06 QP 6 PDFtess_15No ratings yet
- Ethyl Alcohol in Vitreous HumorDocument11 pagesEthyl Alcohol in Vitreous HumorRosaniza KamarudinNo ratings yet
- TESTING STANDARD-IS-15351-2015 As Per BISDocument17 pagesTESTING STANDARD-IS-15351-2015 As Per BISSuyash SainiNo ratings yet
- Light Pollution Taking Its Toll On WildlifeDocument6 pagesLight Pollution Taking Its Toll On WildlifeManal SalamehNo ratings yet
- Degree Prospectus 2023 2024Document88 pagesDegree Prospectus 2023 2024Arshiya Ayaz UmerNo ratings yet