Notes2 PDF
Notes2 PDF
Download as pdf or txt
You might also like
- The Method of Lagrange MultipliersDocument4 pagesThe Method of Lagrange MultipliersSon HoangNo ratings yet
- Mathematics For Economics (ECON 104)Document51 pagesMathematics For Economics (ECON 104)Experimental BeXNo ratings yet
- Operation ResearchDocument23 pagesOperation ResearchTahera ParvinNo ratings yet
- Optim_1_Final_Exam_June_2016Document5 pagesOptim_1_Final_Exam_June_2016phuongmaivu744No ratings yet
- TMA4180 Solutions To Recommended Exercises in Chapter 12 of N&WDocument4 pagesTMA4180 Solutions To Recommended Exercises in Chapter 12 of N&WNickNo ratings yet
- KKT Conditions and Duality: March 23, 2012Document36 pagesKKT Conditions and Duality: March 23, 2012chgsnsaiNo ratings yet
- 7.1 Introduction of Optimal Economic Dispatch of GenerationDocument36 pages7.1 Introduction of Optimal Economic Dispatch of GenerationSwathi PrasadNo ratings yet
- Calculus 01 Lagrange MultipliersDocument10 pagesCalculus 01 Lagrange MultiplierseliseudesafateNo ratings yet
- Problems 9Document7 pagesProblems 9Bharath SNo ratings yet
- 1024 Lagrange MultipliersDocument2 pages1024 Lagrange MultipliersVico SatrianiNo ratings yet
- Chapter 3: The Lagrange Method: Elements of Decision: Lecture Notes of Intermediate MicroeconomicsDocument12 pagesChapter 3: The Lagrange Method: Elements of Decision: Lecture Notes of Intermediate MicroeconomicsAbdullahi ShehuNo ratings yet
- Solutions 9: Demo 1: KKT Conditions With Inequality ConstraintsDocument11 pagesSolutions 9: Demo 1: KKT Conditions With Inequality ConstraintsxAlexis19xNo ratings yet
- Sheet4 SOLDocument6 pagesSheet4 SOLdaviddetrigo7No ratings yet
- Lecture3 PDFDocument42 pagesLecture3 PDFAledavid Ale100% (1)
- Tutorial 3 SolDocument6 pagesTutorial 3 Soldonndonn95No ratings yet
- Lecture31 PDFDocument2 pagesLecture31 PDFVikasNo ratings yet
- Sanet - ST - Limit - Matematics For JEE and Cbse Board (Math Book Book 6) - NodrmDocument72 pagesSanet - ST - Limit - Matematics For JEE and Cbse Board (Math Book Book 6) - NodrmAntonioNo ratings yet
- Lecture Notes 8Document38 pagesLecture Notes 8睿笙No ratings yet
- OQM Lecture Note - Part 8 Unconstrained Nonlinear OptimisationDocument23 pagesOQM Lecture Note - Part 8 Unconstrained Nonlinear OptimisationdanNo ratings yet
- Optimization Problems With Constraints - The Method of Lagrange MultipliersDocument19 pagesOptimization Problems With Constraints - The Method of Lagrange MultipliersMustafa BebooNo ratings yet
- Optim_1_Final_Exam_June_2019Document5 pagesOptim_1_Final_Exam_June_2019phuongmaivu744No ratings yet
- Worksheet Minmax SolnDocument5 pagesWorksheet Minmax SolnSam FraserNo ratings yet
- Lagrangian Opt PDFDocument2 pagesLagrangian Opt PDF6doitNo ratings yet
- MATH1013 Notes For RevisionDocument9 pagesMATH1013 Notes For RevisionJames LaiNo ratings yet
- Limits of FunctionsDocument31 pagesLimits of FunctionsMustafaNo ratings yet
- Lec19 DualityDocument8 pagesLec19 DualityMardig HagopianNo ratings yet
- Non Linear Programming ProblemsDocument66 pagesNon Linear Programming Problemsbits_who_am_iNo ratings yet
- Slack VariableDocument19 pagesSlack VariabletapasNo ratings yet
- 112-2 Week9 EconDocument15 pages112-2 Week9 Econsten931201No ratings yet
- Module 1: Introduction To Rational FunctionsDocument5 pagesModule 1: Introduction To Rational Functionsyolanda renosNo ratings yet
- BasicCal Rules of DifferentiationDocument150 pagesBasicCal Rules of DifferentiationabarrientosfeNo ratings yet
- O4MD 02 FoundationsDocument8 pagesO4MD 02 FoundationsMarcos OliveiraNo ratings yet
- Homework 22 Solutions: Math 21a Spring, 2014Document5 pagesHomework 22 Solutions: Math 21a Spring, 2014PARVATI SINGHNo ratings yet
- Epsilon-Delta Limit Definition, ContinuityDocument3 pagesEpsilon-Delta Limit Definition, ContinuityAlison BuenadibaNo ratings yet
- Module1 Intro To Rational FunctionsDocument5 pagesModule1 Intro To Rational FunctionsDaisy Javier AnchetaNo ratings yet
- Gen Math q1 Week 1 and 2Document8 pagesGen Math q1 Week 1 and 2chiwheng logdatNo ratings yet
- Lecture 1 Functions, Limits and ContinuityDocument16 pagesLecture 1 Functions, Limits and ContinuityLor JanNo ratings yet
- SolucoesDocument16 pagesSolucoescayo fagundesNo ratings yet
- Unit23 SolutionsDocument7 pagesUnit23 SolutionsAbcNo ratings yet
- Introduction, Function and Limits With Derivatives: Module OutlineDocument10 pagesIntroduction, Function and Limits With Derivatives: Module OutlineErn NievaNo ratings yet
- 34 Math 22B Notes 2012 Intermediate CalculusDocument4 pages34 Math 22B Notes 2012 Intermediate CalculusAlejandro Posos ParraNo ratings yet
- Calculus (105) 02Document11 pagesCalculus (105) 02baimingdiNo ratings yet
- Lecture 12. Derivatives of Log - FunctionsDocument5 pagesLecture 12. Derivatives of Log - FunctionsBeshoy AdelNo ratings yet
- Bessel Perturbation SlidesDocument47 pagesBessel Perturbation SlidesTaohim JalohimNo ratings yet
- Sheet - 01 - LimitDocument25 pagesSheet - 01 - LimitMankirat SinghNo ratings yet
- solution-1759313Document5 pagessolution-1759313gaNo ratings yet
- 0 Satisfying: Characteristic Roots and VectorsDocument41 pages0 Satisfying: Characteristic Roots and VectorsShreyasee GuptaNo ratings yet
- Note12 PDFDocument20 pagesNote12 PDFshumailaNo ratings yet
- Chapter 4 - Constrained OptimizationDocument13 pagesChapter 4 - Constrained Optimizationdaanyee beeksisaaNo ratings yet
- 620-361 Operations Research Techniques and Algorithms: Assignment 3 SolutionsDocument3 pages620-361 Operations Research Techniques and Algorithms: Assignment 3 SolutionswhhaoNo ratings yet
- Math 443 Exam 20113 SolutionsDocument5 pagesMath 443 Exam 20113 SolutionsRam Asrey GautamNo ratings yet
- Lagrange MultDocument5 pagesLagrange Multshambel ZnabuNo ratings yet
- Oast DodrukuDocument19 pagesOast Dodrukukotulski.m99No ratings yet
- MA2002 Solution2Document7 pagesMA2002 Solution2snorelex031No ratings yet
- BesselDocument3 pagesBesselRam KumarNo ratings yet
- LagrangeDocument2 pagesLagrangeCristian Menéndez FernándezNo ratings yet
- MT 1112 Calculus Group ADocument7 pagesMT 1112 Calculus Group Aanime admirersNo ratings yet
- Unit 05Document16 pagesUnit 05Hamdardvir Singh BoparaiNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Linear Binary SearchDocument19 pagesLinear Binary Searchbt20107006 Ishroop KaurNo ratings yet
- DSP Mid-2 Important - QuestionsDocument2 pagesDSP Mid-2 Important - Questionseducational9hubNo ratings yet
- 02 ComplexityAnalysis (For Reading)Document46 pages02 ComplexityAnalysis (For Reading)Nguyen Luong Trung (K17 DN)No ratings yet
- Lab 9Document3 pagesLab 9Katneza Katman MohlalaNo ratings yet
- A New Eigenvalue Solver For Solving Eigenvalue Problems in Structural EngineeringDocument5 pagesA New Eigenvalue Solver For Solving Eigenvalue Problems in Structural EngineeringInternational Journal of Engineering Research & ManagementNo ratings yet
- 1 Week Machine Learning & Artificial Intelligence Course ContentsDocument3 pages1 Week Machine Learning & Artificial Intelligence Course ContentsSameer KumarNo ratings yet
- DSA SyllabusDocument3 pagesDSA SyllabusRitesh KumarNo ratings yet
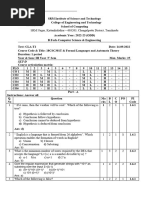
- CT1 101931 18CSC301T SetD AKDocument7 pagesCT1 101931 18CSC301T SetD AKamitmodhwadia9No ratings yet
- Block Diagram Reduction RulesDocument4 pagesBlock Diagram Reduction RulesAkarsh GowdaNo ratings yet
- Asset-V1 MITx+6.86x+3T2020+typeasset+blockslides Lecture3 CompressedDocument15 pagesAsset-V1 MITx+6.86x+3T2020+typeasset+blockslides Lecture3 CompressedRahul VasanthNo ratings yet
- REG NO. 18MIS7099 Machine Learning - Lab - 10 Name: Dana Vamsi KrishnaDocument5 pagesREG NO. 18MIS7099 Machine Learning - Lab - 10 Name: Dana Vamsi Krishnaram vamsiNo ratings yet
- EC6301-OOPs and Data Structures-Anna University-Question PapersDocument10 pagesEC6301-OOPs and Data Structures-Anna University-Question PapersbhuvangatesNo ratings yet
- Is A Tree in Which Every Node Other Than The Leaves Has Two ChildrenDocument11 pagesIs A Tree in Which Every Node Other Than The Leaves Has Two ChildrenKeith Tanaka MagakaNo ratings yet
- Sample Questions For COMP-424 Final Exam: Doina PrecupDocument4 pagesSample Questions For COMP-424 Final Exam: Doina PrecupgomathyNo ratings yet
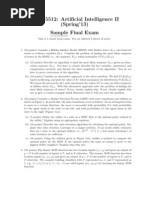
- CSCI 5512: Artificial Intelligence II (Spring'13) Sample Final ExamDocument2 pagesCSCI 5512: Artificial Intelligence II (Spring'13) Sample Final ExamVaibhav Gorde0% (1)
- Neville's Method: 0 1 N 1 2 K I M M M M, M ,..., MDocument2 pagesNeville's Method: 0 1 N 1 2 K I M M M M, M ,..., MوقارافٖضلNo ratings yet
- Bresenham CircleDocument2 pagesBresenham Circlehabtamu mesfinNo ratings yet
- Closest Pair of Points: Cormen Et - Al 33.4Document17 pagesClosest Pair of Points: Cormen Et - Al 33.4Pratham GolwalaNo ratings yet
- Graph Practice: Independent Variable and The Dependent VariableDocument4 pagesGraph Practice: Independent Variable and The Dependent Variablesaud ahmedNo ratings yet
- C Questions For Gate AspirantsDocument11 pagesC Questions For Gate Aspirantsadityajain104No ratings yet
- CMSC 351: AlgorithmsDocument46 pagesCMSC 351: Algorithmshugo burbeloNo ratings yet
- Lec03 Dfs Bfs UcsDocument47 pagesLec03 Dfs Bfs UcsChristos StylianidesNo ratings yet
- Daa Sample Questions of Co-1 and Co-2Document3 pagesDaa Sample Questions of Co-1 and Co-2kowshik emmadisettyNo ratings yet
- Unit II SOLVING PROBLEMS BY SEARCHINGDocument63 pagesUnit II SOLVING PROBLEMS BY SEARCHINGPallavi BhartiNo ratings yet
- Download Introduction to algorithms solutions 3rd Edition Thomas H. Cormen ebook All Chapters PDFDocument60 pagesDownload Introduction to algorithms solutions 3rd Edition Thomas H. Cormen ebook All Chapters PDFfyneswildti8100% (4)
- C LabDocument19 pagesC Labneeraj kapoorNo ratings yet
- Analysis of Algorithms - 12112014 - 054619AMDocument21 pagesAnalysis of Algorithms - 12112014 - 054619AMRussel PatrickNo ratings yet
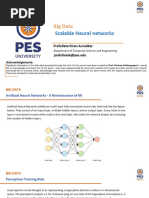
- Scalable Neural NetworkDocument31 pagesScalable Neural Networkaryandeo2011No ratings yet
- Local Search and OptimizationDocument28 pagesLocal Search and OptimizationMazharulislamNo ratings yet
- Chapter 13 Clustering AlgorithmsDocument62 pagesChapter 13 Clustering Algorithmsroopamahesh2003No ratings yet