0% found this document useful (0 votes)
72 viewsDigital Control System - Compressed
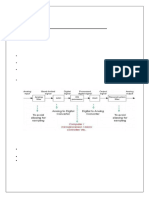
Digital control systems use sampling to model sample-and-hold and analog-to-digital operations, which may involve delays, finite sampling duration, and quantization errors. There are two main types of sampling: single-rate (periodic) sampling and multi-rate sampling. The z-transform relates the output of an ideal sampler to its input and is used to solve difference equations describing digital systems. It maps the s-plane regions (which determine stability) to the unit circle in the z-plane. The pulse transfer function relates the z-transform of the output at sampling instances to the input and is used to analyze cascaded discrete systems.
Uploaded by
Sukhpal SinghCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
72 viewsDigital Control System - Compressed
Digital control systems use sampling to model sample-and-hold and analog-to-digital operations, which may involve delays, finite sampling duration, and quantization errors. There are two main types of sampling: single-rate (periodic) sampling and multi-rate sampling. The z-transform relates the output of an ideal sampler to its input and is used to solve difference equations describing digital systems. It maps the s-plane regions (which determine stability) to the unit circle in the z-plane. The pulse transfer function relates the z-transform of the output at sampling instances to the input and is used to analyze cascaded discrete systems.
Uploaded by
Sukhpal SinghCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 18