Simplices and Finite Elements From Scratch: February 19, 2020
Simplices and Finite Elements From Scratch: February 19, 2020
Download as pdf or txt
You might also like
- Sandvik Metal Cutting Technology Training HandbookDocument364 pagesSandvik Metal Cutting Technology Training HandbookITL200_U95% (21)
- Astm A370Document3 pagesAstm A370Kenny Wong50% (2)
- A Few Comments On Montagnier and Gariaev's Work 2016Document7 pagesA Few Comments On Montagnier and Gariaev's Work 2016Andersinclair AndersinclairNo ratings yet
- Euler HomogeneityDocument4 pagesEuler HomogeneityprivateNo ratings yet
- Euler's Theorem For Homogeneous Functions: Division of The Humanities and Social SciencesDocument5 pagesEuler's Theorem For Homogeneous Functions: Division of The Humanities and Social SciencesNavaneethNo ratings yet
- Lec6 Constr OptDocument30 pagesLec6 Constr OptDevendraReddyPoreddyNo ratings yet
- hw3 SolnDocument7 pageshw3 SolnLiben HagosNo ratings yet
- Functionspaces PDFDocument15 pagesFunctionspaces PDFgabrieleNo ratings yet
- HW 5Document2 pagesHW 5Noe MartinezNo ratings yet
- ConvexDocument63 pagesConvexVipul RanjanNo ratings yet
- 2 NW and Local Linear RegressionDocument14 pages2 NW and Local Linear RegressiondssdNo ratings yet
- Optimization PDFDocument5 pagesOptimization PDFHillal TOUATINo ratings yet
- Ch2 - 3Document6 pagesCh2 - 3m shoshanNo ratings yet
- 465156_solutions8-24Document6 pages465156_solutions8-24Angelo OppioNo ratings yet
- Convex Functions: 3.1 First AcquaintanceDocument36 pagesConvex Functions: 3.1 First AcquaintanceAfreen RizviNo ratings yet
- Lecture 3Document6 pagesLecture 3Đỗ ĐỗNo ratings yet
- Chap2 Lec1 Coercive Functions and Global MinimizersDocument5 pagesChap2 Lec1 Coercive Functions and Global MinimizersUzair AslamNo ratings yet
- Code Questions AnswersDocument2 pagesCode Questions AnswersSudyp DahalNo ratings yet
- Section06 SolutionsDocument11 pagesSection06 SolutionsKarimaNo ratings yet
- Calculus Ii Spring 2011: Harry Mclaughlin Revised 1/22/11 Edited byDocument25 pagesCalculus Ii Spring 2011: Harry Mclaughlin Revised 1/22/11 Edited byDeon RobinsonNo ratings yet
- Lobachevesky Jolany HassanDocument7 pagesLobachevesky Jolany HassanPerepePereNo ratings yet
- CSD311: Artificial IntelligenceDocument33 pagesCSD311: Artificial IntelligenceAyaan KhanNo ratings yet
- Partial Differential Equations NotesDocument13 pagesPartial Differential Equations NotesJoshua LinNo ratings yet
- Dwnload Full Understanding Machine Learning From Theory To Algorithms 1st Edition Shwartz Solutions Manual PDFDocument35 pagesDwnload Full Understanding Machine Learning From Theory To Algorithms 1st Edition Shwartz Solutions Manual PDFasales1715uk100% (21)
- Oscillatory IntegralsDocument8 pagesOscillatory IntegralsLiviu IgnatNo ratings yet
- Adjoint HilbertDocument8 pagesAdjoint HilbertKartik pandeyNo ratings yet
- The Laplace Operator: Definition and Self AdjointnessDocument7 pagesThe Laplace Operator: Definition and Self AdjointnessGenner PinedaNo ratings yet
- Methods of DiffereniationDocument62 pagesMethods of Differeniationpurandar puneetNo ratings yet
- APA Chapter3 T20Document24 pagesAPA Chapter3 T20XxXavillitoxX 5No ratings yet
- Nonparametric Classification 10/36-702: 1 1 N N N I IDocument20 pagesNonparametric Classification 10/36-702: 1 1 N N N I ISNo ratings yet
- Numerical AnalysisDocument55 pagesNumerical Analysisguptakriti040No ratings yet
- (k+1) K (K) (K) (K) : Recall That A Direction Is A Vector of Unit LengthDocument5 pages(k+1) K (K) (K) (K) : Recall That A Direction Is A Vector of Unit LengthHilal Akmal AdiputraNo ratings yet
- Final M2206 2017 EngDocument2 pagesFinal M2206 2017 Engialameh2No ratings yet
- Math 202B Solutions: Assignment 7 D. SarasonDocument2 pagesMath 202B Solutions: Assignment 7 D. SarasonSuper NezhNo ratings yet
- Math 131BH Final: Problem OneDocument4 pagesMath 131BH Final: Problem OneAndrew BackesNo ratings yet
- Final Practice Version SolutionsDocument6 pagesFinal Practice Version Solutionselly.yitongNo ratings yet
- Chain RuleDocument2 pagesChain RuleGaurav ChaudhariNo ratings yet
- Lecture2Document6 pagesLecture2Rohit KumarNo ratings yet
- Notes KupiainenDocument123 pagesNotes KupiainenKatarinaNo ratings yet
- STAT2372 Topic4 2020Document39 pagesSTAT2372 Topic4 2020Simthande SokeNo ratings yet
- ch2 RevisedDocument17 pagesch2 RevisednytoranNo ratings yet
- Week - 2Document58 pagesWeek - 2riotseeker12No ratings yet
- Linear Classification: 1 1 N N I D IDocument33 pagesLinear Classification: 1 1 N N I D ISNo ratings yet
- Math 2060 RieLebLemmaDocument3 pagesMath 2060 RieLebLemmaharshr3142No ratings yet
- Tikhonov RegularizationDocument8 pagesTikhonov RegularizationShubham RaiNo ratings yet
- An Introduction To Discontinuous Galerkin Methods: Module 2: A Simple 1D DG SolverDocument16 pagesAn Introduction To Discontinuous Galerkin Methods: Module 2: A Simple 1D DG Solverketo diet eaterNo ratings yet
- Introduction To Partial Differential Equations 802635S: Valeriy Serov University of Oulu 2011Document122 pagesIntroduction To Partial Differential Equations 802635S: Valeriy Serov University of Oulu 2011henNo ratings yet
- 1 The Derivative As A Rate of Change and As A Func-TionDocument6 pages1 The Derivative As A Rate of Change and As A Func-TionmrtfkhangNo ratings yet
- LinearclassificationDocument31 pagesLinearclassificationidhitappuNo ratings yet
- Bregman Divergence and Mirror DescentDocument8 pagesBregman Divergence and Mirror DescentChampumaharajNo ratings yet
- Notes: Edited by Jimmie D. Lawson and William AdkinsDocument20 pagesNotes: Edited by Jimmie D. Lawson and William AdkinsumerfarooqueNo ratings yet
- 2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4Document10 pages2021 Spring Nonlinear Techniques For Nonlinear Dispersive PDEs 4chejianglongNo ratings yet
- Unit-1-Single Random VariableDocument64 pagesUnit-1-Single Random Variablejuniorteamlead.fresourcesNo ratings yet
- Þ 3.4 Hermite Interpolation: Find The) F (X), P' (X) F ' (X),, P (X) F (X) For All I 0, 1,, NDocument8 pagesÞ 3.4 Hermite Interpolation: Find The) F (X), P' (X) F ' (X),, P (X) F (X) For All I 0, 1,, NguyNo ratings yet
- Convex OptimizationDocument108 pagesConvex OptimizationMontassar MhamdiNo ratings yet
- Higgs Bundles CIEM 200802Document35 pagesHiggs Bundles CIEM 200802Ismail KhanNo ratings yet
- Probability Theory Lecture Notes 13Document3 pagesProbability Theory Lecture Notes 13Xing QiuNo ratings yet
- Evans Pde Solutions Ch2 Ch3Document33 pagesEvans Pde Solutions Ch2 Ch3Emna AyadiNo ratings yet
- Convex Functions and OptimizationDocument20 pagesConvex Functions and OptimizationhoalongkiemNo ratings yet
- Controle16Document4 pagesControle16zakariasahliturgotNo ratings yet
- 2013 Mikls Schweitzer: Contributors: Randomusername, JoybanglaDocument3 pages2013 Mikls Schweitzer: Contributors: Randomusername, JoybanglaAnonymous j6r5KRtrH2No ratings yet
- 2 - Discrete-Time Signals: 1 For 0 N N 1 0 OtherwiseDocument4 pages2 - Discrete-Time Signals: 1 For 0 N N 1 0 OtherwiseKhalil El LejriNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and ApplicationsFrom EverandGreen's Function Estimates for Lattice Schrödinger Operators and ApplicationsNo ratings yet
- Note On Multiplier SDocument1 pageNote On Multiplier SbeckerrolandhNo ratings yet
- Tutorial Sheet: Test 3Document4 pagesTutorial Sheet: Test 3beckerrolandhNo ratings yet
- Python (3) Leaflet: Roland Becker December 16, 2020Document15 pagesPython (3) Leaflet: Roland Becker December 16, 2020beckerrolandhNo ratings yet
- Theorem Spaces.: The BanachDocument5 pagesTheorem Spaces.: The BanachbeckerrolandhNo ratings yet
- Ciarlet InfsupDocument95 pagesCiarlet InfsupbeckerrolandhNo ratings yet
- Long Chen: Min H H HDocument11 pagesLong Chen: Min H H HbeckerrolandhNo ratings yet
- Moog Hydrolux Cee Series Cartridge ValvesDocument18 pagesMoog Hydrolux Cee Series Cartridge ValvesEbrahim AhmariNo ratings yet
- Assignment 3 - LeachingDocument3 pagesAssignment 3 - LeachingRutuja PathakNo ratings yet
- Lecture 2: Material and Energy BalanceDocument21 pagesLecture 2: Material and Energy BalanceTaytoNo ratings yet
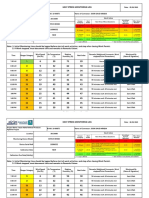
- JAPL-F-En-018 Heat Stress Monitoring LogDocument6 pagesJAPL-F-En-018 Heat Stress Monitoring LogFarrukh IjazNo ratings yet
- 2015 Catalog Compressed PDFDocument47 pages2015 Catalog Compressed PDFashielanieNo ratings yet
- Design and Construction of Wireless Powe 092429Document5 pagesDesign and Construction of Wireless Powe 092429wesleymacaskill171No ratings yet
- Mark Scheme (Results) : Summer 2017Document26 pagesMark Scheme (Results) : Summer 2017Saiyara KhanNo ratings yet
- Textbook - Thermal Physics PopleDocument26 pagesTextbook - Thermal Physics PoplecowsarechillNo ratings yet
- Dynamical Systems: Lecture NotesDocument40 pagesDynamical Systems: Lecture NotesBernard Nkrumah AttobrahNo ratings yet
- Fan LawsDocument39 pagesFan LawsbhatrkNo ratings yet
- Concrete Beam Design Flow ChartsDocument16 pagesConcrete Beam Design Flow Chartsayoub bahmani k80% (5)
- Planning and Design of Ports and Harbours - Code of PracticeDocument18 pagesPlanning and Design of Ports and Harbours - Code of Practicevishal kumar100% (1)
- Datasheet of WBV412H29Document5 pagesDatasheet of WBV412H29محمد مهدی حسنیNo ratings yet
- Sample Calculus ProblemsDocument157 pagesSample Calculus ProblemsMAXIMILIANO CARDENASNo ratings yet
- 11 Math - Test Maker @Document2 pages11 Math - Test Maker @ashfaq4985No ratings yet
- Ultrasonic Testing UT Training Questions Assignment 2Document1 pageUltrasonic Testing UT Training Questions Assignment 2Youg MayweatherNo ratings yet
- Government Polytechnic, Jalgaon: A Micro ProjectDocument13 pagesGovernment Polytechnic, Jalgaon: A Micro ProjectJayesh khachaneNo ratings yet
- Research Chemistry 1819Document19 pagesResearch Chemistry 1819CrazyGamer 14738No ratings yet
- Drafting Electrical and Electronic Layout, DetailDocument8 pagesDrafting Electrical and Electronic Layout, DetailGilbert Bautista0% (1)
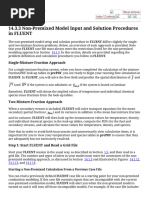
- 14.3.3 Non-Premixed Model Input and Solution Procedures in FLUENTDocument11 pages14.3.3 Non-Premixed Model Input and Solution Procedures in FLUENTmohdkamalhafeezNo ratings yet
- 8 Lect - Well Log Analysis - Neutron - MOD1Document16 pages8 Lect - Well Log Analysis - Neutron - MOD1ليث فلاحNo ratings yet
- Chapter 9: Rheological and Mechanical Properties of PolymersDocument71 pagesChapter 9: Rheological and Mechanical Properties of PolymersJonatas SilvaNo ratings yet
- Series 253 Solar Safety Relief Valve 3 Bar - 1-2inch FBSP X 3-4inch FBSPDocument1 pageSeries 253 Solar Safety Relief Valve 3 Bar - 1-2inch FBSP X 3-4inch FBSPAdvancedWaterCoNo ratings yet
- Aci sp-211-2003Document370 pagesAci sp-211-2003Abigael Valles RamirezNo ratings yet
- Methods of Test For Mortar For Masonry: BSI Standards PublicationDocument14 pagesMethods of Test For Mortar For Masonry: BSI Standards Publicationbihrajan100% (1)
- Action PotentialDocument30 pagesAction PotentialMuhammad AhmedNo ratings yet
- CVSB 371Document8 pagesCVSB 371Long NguyễnNo ratings yet