ELE 2117 Lesson 11
ELE 2117 Lesson 11
Download as pdf or txt
You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Copper Alloy Cross ReferenceDocument3 pagesCopper Alloy Cross ReferencenotZm62FNo ratings yet
- HFSR Soft StarterDocument2 pagesHFSR Soft Starterdip461No ratings yet
- Impact of Power Electronics On Electrical System DesignDocument29 pagesImpact of Power Electronics On Electrical System Designanandjoy4uNo ratings yet
- Motor Nameplate Information Required by NEMA Standards: 1. Manufacturer's TypeDocument12 pagesMotor Nameplate Information Required by NEMA Standards: 1. Manufacturer's TypeWulan NursyifaNo ratings yet
- Dr. Ali Abdul Razzaq ALTAHIR: Lecture 6: Third ClassDocument20 pagesDr. Ali Abdul Razzaq ALTAHIR: Lecture 6: Third ClassAli Altahir100% (1)
- Plugging An Induction MotorDocument23 pagesPlugging An Induction MotorEngr Hamza Ali ImranNo ratings yet
- Use of Baldor PM DC Motors As Generators in Micro-Hydro Systems 2000Document4 pagesUse of Baldor PM DC Motors As Generators in Micro-Hydro Systems 2000Adrián Gael Nina EscobarNo ratings yet
- Full Paper P-031Document9 pagesFull Paper P-031SUBRATA BISWASNo ratings yet
- Lecture 3Document33 pagesLecture 3Heleana Faye BundocNo ratings yet
- Induction Motor ControlDocument22 pagesInduction Motor ControlSenpai TashiNo ratings yet
- AIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorDocument8 pagesAIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorRD GamingNo ratings yet
- 3-Phase Induction MotorDocument23 pages3-Phase Induction MotorAshish Verma100% (1)
- Accelerating and Breakdown TorqueDocument44 pagesAccelerating and Breakdown TorqueekonurudinahmadNo ratings yet
- Characterisation of The Turnigy 150cc Equivalent Brushless Out Runner DC MotorDocument8 pagesCharacterisation of The Turnigy 150cc Equivalent Brushless Out Runner DC Motormuhammad dadang andrianNo ratings yet
- Motor ProtectionDocument41 pagesMotor Protectionrjphansalkar100% (4)
- Chapter 4Document27 pagesChapter 4Selemon AssefaNo ratings yet
- Induction (Asynchronous) Machines 1.1Document9 pagesInduction (Asynchronous) Machines 1.1Areej AdeebNo ratings yet
- Tech Article - Contactor Selection For Motors With Long Starting TimeDocument4 pagesTech Article - Contactor Selection For Motors With Long Starting TimeSandeep NairNo ratings yet
- Power Systems CH - 9 (Zub)Document37 pagesPower Systems CH - 9 (Zub)Dale SteynNo ratings yet
- Schneider No165 Control Monitoring Protection HV MotorsDocument28 pagesSchneider No165 Control Monitoring Protection HV Motorstkdrt2166No ratings yet
- Lec4 Polyphase Induction Motor IIDocument14 pagesLec4 Polyphase Induction Motor IIMohammed Dyhia AliNo ratings yet
- Chapter-2: Dynamic Behavior of Electric DrivesDocument43 pagesChapter-2: Dynamic Behavior of Electric DrivesMuket AgmasNo ratings yet
- Induction To AC Motors FAQDocument24 pagesInduction To AC Motors FAQSrini VasanNo ratings yet
- ED800Document8 pagesED800Mohamed TahounNo ratings yet
- Control of Induction MotorsDocument9 pagesControl of Induction MotorsLaurence MichaelNo ratings yet
- RL Line/Load Reactors: Driving Power QualityDocument6 pagesRL Line/Load Reactors: Driving Power Qualityjorapa7No ratings yet
- Electrical Science-2: Term Paper of Ele102Document7 pagesElectrical Science-2: Term Paper of Ele102shailesh singhNo ratings yet
- Lecture 12 (EPSP)Document28 pagesLecture 12 (EPSP)JaleesNo ratings yet
- Mcqs (Transformers) : Electrical Machine Final RevisionDocument5 pagesMcqs (Transformers) : Electrical Machine Final Revisionmoooo yii trrhjNo ratings yet
- A Very High Speed Switchedreluctance Startergenerator For AircraDocument7 pagesA Very High Speed Switchedreluctance Startergenerator For AircraAimmadNo ratings yet
- 1.1 Basics - of - 3phase - Induction - Motor - Part - 1Document4 pages1.1 Basics - of - 3phase - Induction - Motor - Part - 1Edison EstrellaNo ratings yet
- MeasurementOf SinglePhaseMotor2019Document6 pagesMeasurementOf SinglePhaseMotor2019fissahayehadgu284No ratings yet
- Starter-Parts-Contactor-Fuse-Cb-Thermal-Overload-Relay: Basic Calculation of Motor Torque and CurrentDocument7 pagesStarter-Parts-Contactor-Fuse-Cb-Thermal-Overload-Relay: Basic Calculation of Motor Torque and CurrentMALOY BANDYOPADHYAY100% (1)
- AC Induction Motor SlipDocument6 pagesAC Induction Motor SlipnotastudentNo ratings yet
- Induction Motor Starting Methods: HVAC: Heating, Ventilation & Air-Conditioning / by Guruvignesh / Mechanical EngineeringDocument12 pagesInduction Motor Starting Methods: HVAC: Heating, Ventilation & Air-Conditioning / by Guruvignesh / Mechanical EngineeringLincolyn MoyoNo ratings yet
- Generator Interview QuestionsDocument12 pagesGenerator Interview QuestionsMuhammad Ali Khan Awan100% (1)
- Starting Methods of Induction MotorsDocument8 pagesStarting Methods of Induction MotorsChathuranga Nagasinghe100% (1)
- Mixer Grinder MotorDocument6 pagesMixer Grinder MotorKkbhuvan KkNo ratings yet
- Types of MotorsDocument12 pagesTypes of MotorsMatin Inamdar100% (1)
- 8 Single-Phase Induction Motors - AC Motors - Electronics TextbookDocument8 pages8 Single-Phase Induction Motors - AC Motors - Electronics TextbookSchuldich SchwarzNo ratings yet
- NTN-SNR - General List - Technical Characteristics EsDocument17 pagesNTN-SNR - General List - Technical Characteristics EsDaniel EspitiaNo ratings yet
- Single-phase induction motors: 3-φmotor runs from 1-φ power, but does not startDocument6 pagesSingle-phase induction motors: 3-φmotor runs from 1-φ power, but does not startkaler-ukNo ratings yet
- DriveMotorBasics01 PDFDocument11 pagesDriveMotorBasics01 PDFSundar Kumar Vasantha GovindarajuluNo ratings yet
- An Example of Calculation Transformer Size and Voltage Drop Due Starting of Large MotorDocument15 pagesAn Example of Calculation Transformer Size and Voltage Drop Due Starting of Large Motorerson1981No ratings yet
- Assignment 3Document3 pagesAssignment 3yisakabera123No ratings yet
- VVVF DrivesDocument16 pagesVVVF DrivesIsradani MjNo ratings yet
- Calculate Size of Contactor - Fuse - CB - OL Relay of Star-Delta Starter - Electrical Notes & ArticlesDocument8 pagesCalculate Size of Contactor - Fuse - CB - OL Relay of Star-Delta Starter - Electrical Notes & Articleshemant kumarNo ratings yet
- AGN 090 - Motor Starting FundamentalsDocument11 pagesAGN 090 - Motor Starting FundamentalsariwibowoNo ratings yet
- SoalDocument10 pagesSoalIlham Ayuning Tanjung SariNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Marine Electrics Made Simple or How to Keep the Batteries ChargedFrom EverandMarine Electrics Made Simple or How to Keep the Batteries ChargedNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- A Case Study for a Single-Phase Inverter Photovoltaic System of a Three-Bedroom Apartment Located in Alexandria, Egypt: building industry, #0From EverandA Case Study for a Single-Phase Inverter Photovoltaic System of a Three-Bedroom Apartment Located in Alexandria, Egypt: building industry, #0No ratings yet
- Linear Regression and Correlation Analysis Presentation1Document71 pagesLinear Regression and Correlation Analysis Presentation1elioNo ratings yet
- Emt 3202 PresentationDocument56 pagesEmt 3202 Presentationelio100% (1)
- EMT 3200 Group #4 Curve FittingDocument50 pagesEMT 3200 Group #4 Curve FittingelioNo ratings yet
- Emt 3200 - Group 6 - Numerical Approximations & Errors - ReportDocument24 pagesEmt 3200 - Group 6 - Numerical Approximations & Errors - Reportelio100% (1)
- ELE 2117 - Lesson 9Document36 pagesELE 2117 - Lesson 9elioNo ratings yet
- ELE 2117 Lesson 5Document28 pagesELE 2117 Lesson 5elioNo ratings yet
- ELE 2117 Lesson 6Document49 pagesELE 2117 Lesson 6elioNo ratings yet
- Bloomberg 27-Inch Flat Panel Display BFP200-27 FixedDocument6 pagesBloomberg 27-Inch Flat Panel Display BFP200-27 Fixedanon_45433537No ratings yet
- Preparasi Nanopartikel Kitosan-Tpp/ Ekstrak Etanol Daging BUAH MAHKOTA DEWA (Phaleriamacrocarpa (Scheff) Boerl) DENGAN METODE Gelasi IonikDocument6 pagesPreparasi Nanopartikel Kitosan-Tpp/ Ekstrak Etanol Daging BUAH MAHKOTA DEWA (Phaleriamacrocarpa (Scheff) Boerl) DENGAN METODE Gelasi Ioniknur hayatiNo ratings yet
- Evaluating Wood Preservatives by Field Tests With Stakes: Standard Test Method ofDocument7 pagesEvaluating Wood Preservatives by Field Tests With Stakes: Standard Test Method ofIsrael Orta SánchezNo ratings yet
- Prabhu Deva .A +91 8553822128: Completed Java-Selenium Course at Qspiders. AttendedDocument4 pagesPrabhu Deva .A +91 8553822128: Completed Java-Selenium Course at Qspiders. Attendedprabhu devaNo ratings yet
- Grand Tournament 2021 Mission Pack: Updates & ErrataDocument3 pagesGrand Tournament 2021 Mission Pack: Updates & ErrataAlex PiasetskiyNo ratings yet
- Jobs CanDocument8 pagesJobs CanErnest SUNDAYNo ratings yet
- Bbi2424 SCL Worksheet 4 (Week 7-8) - SummarisingDocument5 pagesBbi2424 SCL Worksheet 4 (Week 7-8) - Summarisinghaikal124675% (4)
- 0116 202006081032 PDFDocument4 pages0116 202006081032 PDFPatrickNo ratings yet
- PED004Gg1 Aguam Act1-6Document4 pagesPED004Gg1 Aguam Act1-6Raisa Bint ZamanNo ratings yet
- River Water Quality Report 2015Document64 pagesRiver Water Quality Report 2015shadman sadikNo ratings yet
- Mapeh3 WK3 Q3 - Slogan and Logo MakingDocument4 pagesMapeh3 WK3 Q3 - Slogan and Logo MakingMae Anne RoqueNo ratings yet
- Sieve Plate Distillation Column - Lab ReportDocument4 pagesSieve Plate Distillation Column - Lab ReportShrankhla NaryaNo ratings yet
- Volume and StrokeDocument39 pagesVolume and StrokeHarpreetSinghNo ratings yet
- Résumé Cours D'anglais 04 2014Document16 pagesRésumé Cours D'anglais 04 2014Moh_ati007No ratings yet
- Nurses Role Fire and DisasterDocument25 pagesNurses Role Fire and DisasterchellczyNo ratings yet
- Demo - Nism 6 - Depository ModuleDocument7 pagesDemo - Nism 6 - Depository ModuleNitin BNo ratings yet
- Mertani IoT Solution - Automatic Water Level Data LogerDocument9 pagesMertani IoT Solution - Automatic Water Level Data LogerAgyl AziziNo ratings yet
- Raza CHP 5Document3 pagesRaza CHP 5Syed Ali Raza NaqviNo ratings yet
- OUG Corporate PresentationDocument16 pagesOUG Corporate Presentationsenebish100% (1)
- PNF BrochureDocument5 pagesPNF BrochuredariandNo ratings yet
- Food Chemistry: Lucas Daniel Tivana, Jose Da Cruz Francisco, Felix Zelder, Bjorn Bergenståhl, Petr DejmekDocument8 pagesFood Chemistry: Lucas Daniel Tivana, Jose Da Cruz Francisco, Felix Zelder, Bjorn Bergenståhl, Petr DejmekAlejandra OspinaNo ratings yet
- New Galois Hulls of Generalized Reed-Solomon CodesDocument12 pagesNew Galois Hulls of Generalized Reed-Solomon CodesMarvin OlavidesNo ratings yet
- VK41../VK81..SERIES: Gas Controls For Combined Valve and Ignition SystemDocument34 pagesVK41../VK81..SERIES: Gas Controls For Combined Valve and Ignition SystemThaynar BarbosaNo ratings yet
- Diagonals in A PolygonDocument5 pagesDiagonals in A Polygonगुंजन सिन्हाNo ratings yet
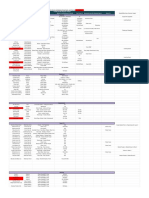
- Toram Market PricesDocument13 pagesToram Market PricesHernandez Yarixa100% (1)
- Pawn Shop Business Plan ExampleDocument52 pagesPawn Shop Business Plan ExampleJoseph QuillNo ratings yet
- Automatica: Pan Zhao Ryozo NagamuneDocument8 pagesAutomatica: Pan Zhao Ryozo NagamuneCESARPINEDANo ratings yet
- Group Assignment-1Document2 pagesGroup Assignment-1natiz addis100% (1)
- Orbit Man26 1327 User GuideDocument116 pagesOrbit Man26 1327 User Guidelams_21No ratings yet