Introduction To OR and Linear Algebra: Part-I
Introduction To OR and Linear Algebra: Part-I
Download as pdf or txt
You might also like
- Value Optimization for Project and Performance ManagementFrom EverandValue Optimization for Project and Performance ManagementNo ratings yet
- Solution - Numericals Market Structure PDFDocument4 pagesSolution - Numericals Market Structure PDFpiyush kumarNo ratings yet
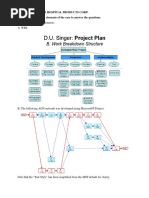
- Project Planning, Scheduling and Control - Assignment 2 D. U. Singer Hospital Products Corp.Document22 pagesProject Planning, Scheduling and Control - Assignment 2 D. U. Singer Hospital Products Corp.piyush kumarNo ratings yet
- Nutsvolts2009 01Document100 pagesNutsvolts2009 01selimNo ratings yet
- Linear Programming BasicsDocument13 pagesLinear Programming BasicsCarlos Ruben Diaz RamirezNo ratings yet
- Decision Science PPT 1Document26 pagesDecision Science PPT 1Soumik Nag100% (2)
- 7.I. Nfed For Business Portfolio AnalysisDocument13 pages7.I. Nfed For Business Portfolio AnalysisSubhadeep PaulNo ratings yet
- Port ManagementDocument3 pagesPort Managementkvln murthyNo ratings yet
- A Study On R&D Performance Maximization Portfolio Analysis Technique Using AHPDocument9 pagesA Study On R&D Performance Maximization Portfolio Analysis Technique Using AHPRafael MunhozNo ratings yet
- DW Suite CoursDocument111 pagesDW Suite CoursFrancine FayoNo ratings yet
- Feasibility StudiesDocument71 pagesFeasibility StudiesKhuram ShahzadNo ratings yet
- What Is Operational ResearchDocument4 pagesWhat Is Operational ResearchShalini YadavNo ratings yet
- Linear Programming in Real LifeDocument17 pagesLinear Programming in Real LifeaaryankaaccNo ratings yet
- Omega: Yuzhuo Qiu, Jun Qiao, Panos M. PardalosDocument12 pagesOmega: Yuzhuo Qiu, Jun Qiao, Panos M. PardalosDana Xiomara Casas de la cruzNo ratings yet
- Computer-Aided Feasibility Study PreparationDocument10 pagesComputer-Aided Feasibility Study PreparationracheljeanecadungogNo ratings yet
- Get The Latest l4m7 Practice Questions To Make Preparations KilltestDocument47 pagesGet The Latest l4m7 Practice Questions To Make Preparations Killtestsatishmutal.2029100% (1)
- CH-1 Introduction To ORDocument36 pagesCH-1 Introduction To ORbelay mihreteNo ratings yet
- Project CharacteristicsDocument10 pagesProject CharacteristicsBridget SmithNo ratings yet
- New SyllabusDocument6 pagesNew SyllabusChirag SachdevaNo ratings yet
- Department of Mechanical Engineering, VCET, Puttur. 2Document20 pagesDepartment of Mechanical Engineering, VCET, Puttur. 2Shobhith ShobhiNo ratings yet
- Linear ProgrammingDocument4 pagesLinear ProgrammingKibet KiptooNo ratings yet
- Operations Research AssignmentDocument14 pagesOperations Research AssignmentGodfred AbleduNo ratings yet
- 16095-Article Text-19589-1-2-20210518Document10 pages16095-Article Text-19589-1-2-20210518cheng tedNo ratings yet
- Application of Linear Programming Techniques To PracticalDocument13 pagesApplication of Linear Programming Techniques To PracticalAlexander Decker100% (1)
- MMP1Document1 pageMMP1anon_443147050No ratings yet
- OR_Ebook_1_47514Document56 pagesOR_Ebook_1_47514BadrinarayanPadhyNo ratings yet
- Fallsem2012-13 CP0413 TB01Document33 pagesFallsem2012-13 CP0413 TB01Tejinder Singh ਗਿੱਲNo ratings yet
- JNTUA JNTUH JNTUK - B Tech - 3 1 - Lecture Notes - MECH - Operations Research or Lecture NotesDocument60 pagesJNTUA JNTUH JNTUK - B Tech - 3 1 - Lecture Notes - MECH - Operations Research or Lecture Notesarjunguttula11No ratings yet
- Course: Student Name: Godfred Kwame Abledu Identification Number: UD17440HST25230Document31 pagesCourse: Student Name: Godfred Kwame Abledu Identification Number: UD17440HST25230Godfred AbleduNo ratings yet
- Contoh Artikel Survival StockDocument8 pagesContoh Artikel Survival Stocknickysuciadi2409No ratings yet
- MecoDocument8 pagesMecosachinkumarmalra792000No ratings yet
- Calibrating Huff ModelDocument33 pagesCalibrating Huff ModelJohannes StammerNo ratings yet
- Introduction To OTDocument13 pagesIntroduction To OTAbdul KhanNo ratings yet
- Market Research Plan: 1. OverviewDocument3 pagesMarket Research Plan: 1. OverviewwejdazoNo ratings yet
- Introducton To Operation ResearchDocument82 pagesIntroducton To Operation ResearchPriyanka Dey100% (1)
- Class 3.1Document70 pagesClass 3.1Vimukthi DeshapriyaNo ratings yet
- Case StudyDocument5 pagesCase StudychathungikaNo ratings yet
- NSSE 2011 Nirmalya Applications of SEDocument48 pagesNSSE 2011 Nirmalya Applications of SEAbhinav GauravNo ratings yet
- Quantitative Management MethodsDocument23 pagesQuantitative Management Methodsmark lloyd garciaNo ratings yet
- Or PPTSDocument154 pagesOr PPTSrkNo ratings yet
- Linear Programming-Graphic Method: Chapter-04Document36 pagesLinear Programming-Graphic Method: Chapter-04Anonymous OThBFHuNo ratings yet
- Management Science 2Document9 pagesManagement Science 2Queeny CuraNo ratings yet
- Overview of OtDocument40 pagesOverview of OtNaman Ku SangerNo ratings yet
- Or Unit - 1 Theory NotesDocument8 pagesOr Unit - 1 Theory NotesSandy booNo ratings yet
- Aeng420 - NotesDocument6 pagesAeng420 - NotesFrancine Kurtney Liam DayaoNo ratings yet
- Operations Research Techniques Applied To The FinancialMarketsDocument10 pagesOperations Research Techniques Applied To The FinancialMarketsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Feasibility Study: Dr. R Bista Ms Gyan Laxmi Shrestha Basic Administration Project 2017Document22 pagesFeasibility Study: Dr. R Bista Ms Gyan Laxmi Shrestha Basic Administration Project 2017995aarveeNo ratings yet
- S1A Intro To Business AnalyticsDocument39 pagesS1A Intro To Business AnalyticsPrajwal Komarla SwaminathNo ratings yet
- Notes On Operation Research Part 1 For IV Semester by Gaurav SrivastavaDocument37 pagesNotes On Operation Research Part 1 For IV Semester by Gaurav Srivastavaarchanaloganathan305No ratings yet
- Case 3 Nothern DigitalDocument4 pagesCase 3 Nothern DigitalkhalisazahraNo ratings yet
- Computational Intelligence and Financial Markets - A Survey and Future DirectionsDocument18 pagesComputational Intelligence and Financial Markets - A Survey and Future DirectionsMarcus ViniciusNo ratings yet
- Class 4Document69 pagesClass 4Vimukthi DeshapriyaNo ratings yet
- Advantages of Linear ProgrammingDocument8 pagesAdvantages of Linear ProgrammingMintoo KumarNo ratings yet
- BEC Mnemonics, Formulas, and Condensed ITDocument5 pagesBEC Mnemonics, Formulas, and Condensed ITmsanghavi1No ratings yet
- DMBA205 Operations ResearchDocument13 pagesDMBA205 Operations ResearchshikhatiwaryNo ratings yet
- Hamed Elkhedim: Economic Project Appraisal / Market Research / Business PlanDocument3 pagesHamed Elkhedim: Economic Project Appraisal / Market Research / Business Planachill-aNo ratings yet
- Gujarat Technological University: Semester - V Subject Name: Operation ResearchDocument3 pagesGujarat Technological University: Semester - V Subject Name: Operation ResearchFa CaNo ratings yet
- Re Cri Retd de JagerDocument23 pagesRe Cri Retd de JagerMaitheNo ratings yet
- ED unit 4Document4 pagesED unit 4RahulNo ratings yet
- Hu 2018 Deep StockDocument5 pagesHu 2018 Deep Stockprime developersNo ratings yet
- Unit 9Document16 pagesUnit 9Asnake MekonnenNo ratings yet
- Building Options at Project Front-End Strategizing: The Power of Capital Design for EvolvabilityFrom EverandBuilding Options at Project Front-End Strategizing: The Power of Capital Design for EvolvabilityNo ratings yet
- The ASQ Pocket Guide to Statistics for Six Sigma Black BeltsFrom EverandThe ASQ Pocket Guide to Statistics for Six Sigma Black BeltsNo ratings yet
- SOM612 - 5 - Survey ResearchDocument25 pagesSOM612 - 5 - Survey Researchpiyush kumarNo ratings yet
- SOM612 - 2 - Theory - Process - Problem DefinitionDocument31 pagesSOM612 - 2 - Theory - Process - Problem Definitionpiyush kumarNo ratings yet
- SOM612 - 4 - Observation - Secondry ResearchDocument22 pagesSOM612 - 4 - Observation - Secondry Researchpiyush kumarNo ratings yet
- Cash Management: Prof S N Rao 1Document91 pagesCash Management: Prof S N Rao 1piyush kumarNo ratings yet
- Analysis of Funds Flow Statements: Prof S N Rao 1Document22 pagesAnalysis of Funds Flow Statements: Prof S N Rao 1piyush kumarNo ratings yet
- SOM612 - 3 - Qualitative ResearchDocument26 pagesSOM612 - 3 - Qualitative Researchpiyush kumarNo ratings yet
- Understanding Financial Statements: Key Concepts and SkillsDocument54 pagesUnderstanding Financial Statements: Key Concepts and Skillspiyush kumarNo ratings yet
- Financial Planning & Strategy: Prof S N Rao 1Document41 pagesFinancial Planning & Strategy: Prof S N Rao 1piyush kumarNo ratings yet
- Numericals Market StructureDocument2 pagesNumericals Market Structurepiyush kumarNo ratings yet
- Assignment Problems Assignment Problems: Prasun Das Prasun DasDocument16 pagesAssignment Problems Assignment Problems: Prasun Das Prasun Daspiyush kumarNo ratings yet
- A Core Competency in Managerial Accounting Education: Project ManagementDocument9 pagesA Core Competency in Managerial Accounting Education: Project Managementpiyush kumarNo ratings yet
- Communicating ResearchDocument17 pagesCommunicating Researchpiyush kumarNo ratings yet
- Markstrat Questionnaire - Suggested AnswersDocument6 pagesMarkstrat Questionnaire - Suggested AnswersHafizkamranashrafNo ratings yet
- The Following Are The Elements: A. WbsDocument8 pagesThe Following Are The Elements: A. Wbspiyush kumarNo ratings yet
- Syllabus (12 Weeks / 2 Classes Per Week)Document4 pagesSyllabus (12 Weeks / 2 Classes Per Week)veronika rugunNo ratings yet
- MidTerm Test English 4Document2 pagesMidTerm Test English 4tlinh1768No ratings yet
- Bullying Is NefariousDocument2 pagesBullying Is NefariousSEYALIERY COZENSNo ratings yet
- Peperiksaan Pertengahan Tahun 2020 Bahasa Inggeris - Penulisan 014Document8 pagesPeperiksaan Pertengahan Tahun 2020 Bahasa Inggeris - Penulisan 014Nor BeeNo ratings yet
- Data Mining Process, Techniques, Tools & ExamplesDocument11 pagesData Mining Process, Techniques, Tools & Examplestofy79No ratings yet
- Advanced 2Document2 pagesAdvanced 2nadir aliNo ratings yet
- De Thi Thu TN THPT 2024 Tieng Anh Phat Trien Tu de Minh Hoa de 13Document14 pagesDe Thi Thu TN THPT 2024 Tieng Anh Phat Trien Tu de Minh Hoa de 13nhitatuyet1701No ratings yet
- Types of NurseryDocument32 pagesTypes of NurseryMaridee Boniog MataNo ratings yet
- Sugar (F) US Grower QuestionnaireDocument15 pagesSugar (F) US Grower QuestionnaireShreeyaJain 5712No ratings yet
- RDL 2 - Air Quality Index LevelDocument67 pagesRDL 2 - Air Quality Index LevelJenny AndalNo ratings yet
- What Is EasterDocument6 pagesWhat Is EasterSanja HelixNo ratings yet
- Gas and Air Filter GF/1 RP 1/2 - RP 2 GF/3 DN 40 - DN 100 GF DN 125 - DN 200Document8 pagesGas and Air Filter GF/1 RP 1/2 - RP 2 GF/3 DN 40 - DN 100 GF DN 125 - DN 200TobiasAngererNo ratings yet
- Mado Kara Mieru (Through The Window I See) : Hattori Ransetsu (Author)Document1 pageMado Kara Mieru (Through The Window I See) : Hattori Ransetsu (Author)andyNo ratings yet
- Math UnitDocument30 pagesMath Unitapi-250964578No ratings yet
- Form 4-3.1 Nonconformance Handling PartsDocument11 pagesForm 4-3.1 Nonconformance Handling Partsjrjm1441No ratings yet
- Paper 1 (Vowels)Document12 pagesPaper 1 (Vowels)Bao NguyenNo ratings yet
- Glidden Sellador Acr G 7000Document12 pagesGlidden Sellador Acr G 7000Chrystell JoeyNo ratings yet
- English 6 DLL Quarter 1 Week 3Document8 pagesEnglish 6 DLL Quarter 1 Week 3colleenNo ratings yet
- CFD Flow Analysis and Optimization of Exhaust MufflerDocument6 pagesCFD Flow Analysis and Optimization of Exhaust MufflerIJRASETPublicationsNo ratings yet
- Farhana Allotment OrderDocument2 pagesFarhana Allotment Orderpiwed55574No ratings yet
- Satelec X Mind DC Brochure enDocument133 pagesSatelec X Mind DC Brochure enAndres Alberto Sanchez LaraNo ratings yet
- ABS - Part 4 - e PDFDocument700 pagesABS - Part 4 - e PDFMuhammad Fauzan Mauliawan100% (1)
- LittleWorldofWhimsy Pumpkin Bear Amigurumi PatternDocument9 pagesLittleWorldofWhimsy Pumpkin Bear Amigurumi PatternPiggydo GamingNo ratings yet
- The Usual SuspectsDocument7 pagesThe Usual Suspectsreece_samuels_75944No ratings yet
- Master List Machines EqupmentDocument39 pagesMaster List Machines Equpmentdevansh ranaNo ratings yet
- Hazard Analysis and Risk Control Record: Schlumberger-PrivateDocument6 pagesHazard Analysis and Risk Control Record: Schlumberger-Privatehans vatriolisNo ratings yet
- HDBK172F 06Document45 pagesHDBK172F 06xolraxNo ratings yet
- Balbir Pasha Ko AIDS Hoga KyaDocument6 pagesBalbir Pasha Ko AIDS Hoga Kyaravichess6669100% (1)
- Philippine Folk DanceDocument5 pagesPhilippine Folk DanceMary Grace V. PeñalbaNo ratings yet