8086 Interrupts and Interrupt Responses
8086 Interrupts and Interrupt Responses
Download as pdf or txt
You might also like
- 8086 Microprocessor Interfacing MCQ SDocument4 pages8086 Microprocessor Interfacing MCQ SDeepak Ahlawat67% (3)
- Microcontroller MCQ QuizDocument5 pagesMicrocontroller MCQ QuizDeepika SharmaNo ratings yet
- 8051 MCQDocument25 pages8051 MCQRohan Bachhav100% (1)
- Chapter 2 - Parallel Interfacing With Microprocessor Based SystemDocument32 pagesChapter 2 - Parallel Interfacing With Microprocessor Based SystemSuroj BurlakotiNo ratings yet
- Digital Electronics (Pc-Ee-402) MCQ With AnswersDocument11 pagesDigital Electronics (Pc-Ee-402) MCQ With AnswersSanjoy Pathak100% (1)
- Chapter 6 Instruction Set of 8085 & ProgrammingDocument103 pagesChapter 6 Instruction Set of 8085 & Programmingshubhankar pal100% (3)
- 8086 Instruction Set: Data Transfer InstructionsDocument26 pages8086 Instruction Set: Data Transfer InstructionsNiharika KorukondaNo ratings yet
- NCK-PLC General Reset CompleteDocument2 pagesNCK-PLC General Reset CompleteNabil Live75% (8)
- Software and Hardware Interrupt ApplicationsDocument10 pagesSoftware and Hardware Interrupt Applicationssatyanarayana12No ratings yet
- 8086 Microprocessor - InterruptsDocument35 pages8086 Microprocessor - InterruptsRocky SamratNo ratings yet
- 8086 and Memory Interfacing - FinalDocument28 pages8086 and Memory Interfacing - FinalAnushkaSinha100% (2)
- 8255 and Interfacing With 8086Document33 pages8255 and Interfacing With 8086satyanarayana12No ratings yet
- 8086 - Interfacing Analog To Digital Converters (ADC)Document22 pages8086 - Interfacing Analog To Digital Converters (ADC)PARIJAAT B MITRANo ratings yet
- MODULE 4: 8051 Serial Port Programming in Assembly and C: Microcontroller Notes:18EE52Document51 pagesMODULE 4: 8051 Serial Port Programming in Assembly and C: Microcontroller Notes:18EE52SuprithaNo ratings yet
- Microprocessor: 8085: Multiple Choice Questions and AnswersDocument31 pagesMicroprocessor: 8085: Multiple Choice Questions and AnswersAlpesh Thesiya67% (3)
- Memory Interfacing With 8086Document14 pagesMemory Interfacing With 8086Anuj Kumar52% (21)
- 8237 DMA ControllerDocument11 pages8237 DMA ControllerRojot Saha100% (1)
- Direct Memory Access (DMA) and The DMA Controller (DMAC) 8237Document24 pagesDirect Memory Access (DMA) and The DMA Controller (DMAC) 8237abu sayedNo ratings yet
- CHAPTER 5: ADC, DAC Interfacing With 8086 and Its ApplicationDocument10 pagesCHAPTER 5: ADC, DAC Interfacing With 8086 and Its ApplicationAnikhet Mulky100% (1)
- 8086 Addressing Modes - Microprocessors Questions and Answers - SanfoundryDocument6 pages8086 Addressing Modes - Microprocessors Questions and Answers - SanfoundryAbhay maneNo ratings yet
- Hardwired Control UnitDocument2 pagesHardwired Control Unitcafeinternet2004100% (1)
- Register Organization of 8086 PDFDocument10 pagesRegister Organization of 8086 PDFDevikaNo ratings yet
- Interfacing A Multiplexed Seven Segment Display With The 8086 MicroprocessorDocument9 pagesInterfacing A Multiplexed Seven Segment Display With The 8086 Microprocessorshourya sinhaNo ratings yet
- Microprocessor & Microcontroller Objective Type QuestionsDocument2 pagesMicroprocessor & Microcontroller Objective Type Questionsgokulchandru100% (3)
- Computer Organization - Instruction Formats (Zero, One, Two and Three Address Instruction) - GeeksforGeeksDocument4 pagesComputer Organization - Instruction Formats (Zero, One, Two and Three Address Instruction) - GeeksforGeeksDharamvir Saini100% (2)
- Programming Model of 8086Document4 pagesProgramming Model of 8086Prince Vegeta100% (1)
- Memory Organisation & Addressing Modes of 8085Document14 pagesMemory Organisation & Addressing Modes of 8085iVishalNo ratings yet
- Directives of 8051Document8 pagesDirectives of 8051Piyush chaudhari50% (2)
- Interfacing LED With 8086 PDFDocument9 pagesInterfacing LED With 8086 PDFqnu0757% (7)
- Data Transfer and ManipulationDocument11 pagesData Transfer and ManipulationshubhamNo ratings yet
- 8096 Microcontrollers NotesDocument9 pages8096 Microcontrollers NotesNarasimha Murthy YayavaramNo ratings yet
- Clock Generator 8284Document14 pagesClock Generator 8284Faiz Ahmed100% (1)
- Question Bank: UNIT I - 8086 Microprocessor Part - A (2 Marks)Document10 pagesQuestion Bank: UNIT I - 8086 Microprocessor Part - A (2 Marks)MAHALAKSHMI MALINI100% (1)
- 8086 Interrupts - Interrupt Vector TableDocument13 pages8086 Interrupts - Interrupt Vector TableRocky Samrat100% (1)
- 8051 Microcontroller InstructionDocument32 pages8051 Microcontroller InstructionjharidasNo ratings yet
- Different Modes of Data TransferDocument2 pagesDifferent Modes of Data TransferRekha Al85% (13)
- Memory Interfacing: Example: Interface 4KB Memory To 8085 With Starting Address A000HDocument5 pagesMemory Interfacing: Example: Interface 4KB Memory To 8085 With Starting Address A000HSreepadam Padam100% (1)
- ARM - PPT 8Document74 pagesARM - PPT 8roysalways4u100% (1)
- Timing Diagram Mvi A, 32Document2 pagesTiming Diagram Mvi A, 32Rohan Vaidya60% (15)
- Interrupt Structure and Processing of 8086Document16 pagesInterrupt Structure and Processing of 8086kpenchal615No ratings yet
- Interfacing 8251 With 8086 PDFDocument10 pagesInterfacing 8251 With 8086 PDFMurthyNo ratings yet
- Mylecture TMS320C5x ArchitectureDocument63 pagesMylecture TMS320C5x ArchitectureGurjeet Singh67% (3)
- Lab Manual 8051Document40 pagesLab Manual 8051Gnanasambanthan Rajendran50% (2)
- Important Question Solutions of 8085 - ComputerSCDocument59 pagesImportant Question Solutions of 8085 - ComputerSCParamartha BanerjeeNo ratings yet
- Mapping TechniquesDocument4 pagesMapping TechniquesBastin RogersNo ratings yet
- Question With Answer MP & MCDocument13 pagesQuestion With Answer MP & MCMATHANKUMAR.S100% (1)
- 8086 Assembler Directives: SegmentDocument5 pages8086 Assembler Directives: SegmentNiharika KorukondaNo ratings yet
- Samples of MCQ ARM PDFDocument4 pagesSamples of MCQ ARM PDFKomal50% (2)
- DSP C16 - UNIT-6 (Ref-2)Document26 pagesDSP C16 - UNIT-6 (Ref-2)Vaishnavi. KoyaNo ratings yet
- 8051 Microcontroller NotesDocument40 pages8051 Microcontroller Notesilg1100% (1)
- Memory Interfacing With 8086Document10 pagesMemory Interfacing With 8086satyanarayana12100% (1)
- Stepper Motor InterfacingDocument7 pagesStepper Motor InterfacingHyma Prasad Gelli75% (4)
- 2-Unit 2 MPMC 8086 NotesDocument22 pages2-Unit 2 MPMC 8086 NotesRayapati Devi Prasad100% (2)
- Input/ Output Organization: Accessing I/O DevicesDocument12 pagesInput/ Output Organization: Accessing I/O DevicesGahan A V Gowda50% (2)
- Pic Microcontroller - Class NotesDocument26 pagesPic Microcontroller - Class NotesNarasimha Murthy Yayavaram80% (25)
- LPC2148 DacDocument14 pagesLPC2148 DacSmruti Pore100% (1)
- 4.3.1 Bus ArbitrationDocument9 pages4.3.1 Bus Arbitrationkollavivek_534195858100% (2)
- Unit-3 Part-A MPMCDocument17 pagesUnit-3 Part-A MPMCsubbaraoNo ratings yet
- Interrupts PDFDocument4 pagesInterrupts PDFHermain Fayyaz KarimNo ratings yet
- Rohini 30668205558Document6 pagesRohini 30668205558Sri MsdNo ratings yet
- 7.PIC 8259A (Shortened)Document19 pages7.PIC 8259A (Shortened)Akram TahaNo ratings yet
- 8086 Interrupt System: By. M. ChinyukuDocument29 pages8086 Interrupt System: By. M. ChinyukuProsper MuzendaNo ratings yet
- Introduction To MicroprocessorDocument20 pagesIntroduction To MicroprocessorNiharika KorukondaNo ratings yet
- 8086 Assembler Directives: SegmentDocument5 pages8086 Assembler Directives: SegmentNiharika KorukondaNo ratings yet
- Unit - Iii 8086 InterruptsDocument22 pagesUnit - Iii 8086 InterruptsNiharika KorukondaNo ratings yet
- Ece VI Digital Communication 10ec61 NotesDocument252 pagesEce VI Digital Communication 10ec61 NotesNiharika Korukonda100% (1)
- Unit 5Document59 pagesUnit 5Niharika KorukondaNo ratings yet
- Digital Communication - Quantization - Tutorialspoint PDFDocument5 pagesDigital Communication - Quantization - Tutorialspoint PDFNiharika KorukondaNo ratings yet
- I/O (32) 34V16 Pal Central Switch Matrix: 2.2.2 Advanced Micro Devices (Amd) CpldsDocument1 pageI/O (32) 34V16 Pal Central Switch Matrix: 2.2.2 Advanced Micro Devices (Amd) CpldsNiharika KorukondaNo ratings yet
- OOP OutlineDocument4 pagesOOP OutlineLue starNo ratings yet
- High-Frequency Response of Common-Emitter and Common-Source CircuitsDocument22 pagesHigh-Frequency Response of Common-Emitter and Common-Source CircuitsMuthukrishnan Vijayan VijayanNo ratings yet
- Mcadd 401 Os June 2022Document2 pagesMcadd 401 Os June 2022Abhay PanchalNo ratings yet
- The Economic Value of Migrating On-Premises SQL Server Instances To Microsoft Azure SQL SolutionsDocument12 pagesThe Economic Value of Migrating On-Premises SQL Server Instances To Microsoft Azure SQL SolutionsJosNo ratings yet
- Hptcpip PDFDocument7 pagesHptcpip PDFasdasddasdeaNo ratings yet
- NT00378-11-En PowerLogic T300 User ManualDocument460 pagesNT00378-11-En PowerLogic T300 User ManualmsiantexNo ratings yet
- 15 Asked Questions in KPMGDocument22 pages15 Asked Questions in KPMGRajat GuptaNo ratings yet
- Asynchronous IO With Boost - Asio - Michael Caisse - CppCon 2016 PDFDocument104 pagesAsynchronous IO With Boost - Asio - Michael Caisse - CppCon 2016 PDFDaniel MezaNo ratings yet
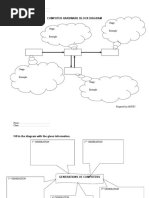
- Computer Hardware Block Diagram Complete The Diagram.: Name: .. Class: .Document6 pagesComputer Hardware Block Diagram Complete The Diagram.: Name: .. Class: .kt88chinNo ratings yet
- Prospectus Introduction To Programming in Java: Simple Computer GamesDocument7 pagesProspectus Introduction To Programming in Java: Simple Computer GamesShaoyuan XuNo ratings yet
- Interview Questions Consolidated MainframeDocument8 pagesInterview Questions Consolidated MainframechaithraknNo ratings yet
- SRS Let My People CodeDocument14 pagesSRS Let My People CodeApiNo ratings yet
- Jobaid: T1/E1 Efm NteDocument4 pagesJobaid: T1/E1 Efm NtejlmerdanNo ratings yet
- KRONOS Update and Restore E2Document4 pagesKRONOS Update and Restore E2EderNo ratings yet
- MU5EEF08 - Project IdeasDocument8 pagesMU5EEF08 - Project IdeasKhaled LechhebNo ratings yet
- NR 900S New User Manual ENGDocument29 pagesNR 900S New User Manual ENGHồNg ThânNo ratings yet
- SM-C101 SchematicDocument29 pagesSM-C101 SchematicMiguel Macias RossiNo ratings yet
- Comparison of Software Development MethodologiesDocument14 pagesComparison of Software Development MethodologiesKamal TiwariNo ratings yet
- Computer Science-Research MethodsDocument25 pagesComputer Science-Research MethodsddipeshNo ratings yet
- W510tu EsmDocument86 pagesW510tu Esmselçuk avcıNo ratings yet
- 9800 Relay SeriesDocument2 pages9800 Relay Seriesivasi ivasiNo ratings yet
- BSS Counter Name Counter NumberDocument27 pagesBSS Counter Name Counter NumberanthonyNo ratings yet
- s8674 - IsPF Hidden TreasuresDocument19 pagess8674 - IsPF Hidden TreasuresMarcus MelloNo ratings yet
- IT Binary SystemDocument2 pagesIT Binary SystemmaryaniNo ratings yet
- TMW9144 UmDocument36 pagesTMW9144 UmSpecialissimo JazzNo ratings yet
- Electrical Switches: Ilma Nafees Wahab Hussain Dania Irshad Mohd. Aqdas UsmaniDocument9 pagesElectrical Switches: Ilma Nafees Wahab Hussain Dania Irshad Mohd. Aqdas UsmaniWahab HussainNo ratings yet
- Difference Between Fieldbus, Profibus and HART ProtocolsDocument6 pagesDifference Between Fieldbus, Profibus and HART ProtocolslampfievNo ratings yet
- The Migration Process SimplifiedDocument15 pagesThe Migration Process SimplifiedYohanna Monsalvez RojasNo ratings yet
- LAB SESSSION 01 (AutoRecovered)Document12 pagesLAB SESSSION 01 (AutoRecovered)Bhavana100% (2)