C P - PH 354: Omputational Hysics
C P - PH 354: Omputational Hysics
Download as pdf or txt
You might also like
- CPE111 Mod 1Document97 pagesCPE111 Mod 1kallista.antenorNo ratings yet
- Innes Ewart DeathDocument1 pageInnes Ewart DeathKrystal ChavezNo ratings yet
- Manual Español-Ingles 7600Document32 pagesManual Español-Ingles 7600Laboratorio biomedico Virrey solisi ips100% (2)
- Exercise 04 Linear Regression PDFDocument17 pagesExercise 04 Linear Regression PDFAndreea MusatNo ratings yet
- Formula Handbook For IPhoDocument4 pagesFormula Handbook For IPhoAbhishek SahariaNo ratings yet
- C P - PH 354: Omputational HysicsDocument12 pagesC P - PH 354: Omputational HysicsAthira GopalNo ratings yet
- The Concept of CrimeDocument8 pagesThe Concept of CrimeJoshua S Mjinja100% (6)
- Expt 1 - PHY433-430 - PHET Simulation - Vector - Oct 2020 PDFDocument7 pagesExpt 1 - PHY433-430 - PHET Simulation - Vector - Oct 2020 PDFNurul AtikaNo ratings yet
- Phys 2Document3 pagesPhys 2Dana Franchesca DichosoNo ratings yet
- Mini Launcher Lab ReportDocument7 pagesMini Launcher Lab ReportMohammad AnasNo ratings yet
- Poisson DistributionDocument13 pagesPoisson DistributionshountyNo ratings yet
- Lab 03Document9 pagesLab 03Omor FarukNo ratings yet
- Special Topics Exam 8 Differential EquationDocument2 pagesSpecial Topics Exam 8 Differential EquationEme DumlaoNo ratings yet
- Revision Questions (Test 2)Document3 pagesRevision Questions (Test 2)Jing HengNo ratings yet
- Application Form For Admission 2021-2022Document8 pagesApplication Form For Admission 2021-2022Youngsonya JubeckingNo ratings yet
- DE Midterm ExaminationDocument3 pagesDE Midterm ExaminationHades Vesarius RiegoNo ratings yet
- Maths MCQZ Complete Book - PDFDocument43 pagesMaths MCQZ Complete Book - PDFZia Muhammad HaiderNo ratings yet
- Fa1.1 (M1 - Lab - 3Q2324)Document3 pagesFa1.1 (M1 - Lab - 3Q2324)rajc recioNo ratings yet
- Masonry - Midterm Project PDFDocument11 pagesMasonry - Midterm Project PDFRaffy BufeteNo ratings yet
- Muller Method: Where Z - 2c B B - 4acDocument3 pagesMuller Method: Where Z - 2c B B - 4acKantharaj Chinnappa0% (1)
- Vu SolvedDocument60 pagesVu SolvedImranShaheenNo ratings yet
- Esci 121N - Fundamentals of Surveying: Department of Geodetic EngineeringDocument8 pagesEsci 121N - Fundamentals of Surveying: Department of Geodetic EngineeringAliyah Nathalie Nicole EvansNo ratings yet
- Lecture 14Document21 pagesLecture 14Garvit RajputNo ratings yet
- CH 03 HWDocument36 pagesCH 03 HWClayton KwokNo ratings yet
- 2.6 M Uller's Method: Chapter 2. Solutions of Equations of One VariableDocument9 pages2.6 M Uller's Method: Chapter 2. Solutions of Equations of One VariableXyzNo ratings yet
- 5장솔루션Document192 pages5장솔루션양동영No ratings yet
- 6 PDFDocument4 pages6 PDFLethal Illusion0% (1)
- STA 421 LNoteDocument20 pagesSTA 421 LNotesanusi bello bakuraNo ratings yet
- Case-Study 1Document5 pagesCase-Study 1Frances Louise MarceloNo ratings yet
- Engineering Econ Lab - Week 1Document2 pagesEngineering Econ Lab - Week 1Zac QuezonNo ratings yet
- Differential EquationDocument3 pagesDifferential EquationJirah Gicangao100% (1)
- Projectile Motion Lab ReportDocument12 pagesProjectile Motion Lab ReportessaidNo ratings yet
- Math Gened Reviewer 1Document17 pagesMath Gened Reviewer 1Julybee Latog Ines100% (2)
- Units, Physical Quantities, and Vectors: BES 112 Module 1Document3 pagesUnits, Physical Quantities, and Vectors: BES 112 Module 1Waleed JaddiNo ratings yet
- Problem 1.2 (A) (B) : For The Pressure Wave Described in Example 1-1, PlotDocument1 pageProblem 1.2 (A) (B) : For The Pressure Wave Described in Example 1-1, PlotEric KialNo ratings yet
- Analog and Digital Signal Processing Lab TaskDocument10 pagesAnalog and Digital Signal Processing Lab TaskSwayam MohapatraNo ratings yet
- Review Questions in ElemagDocument17 pagesReview Questions in ElemagHarold AntonioNo ratings yet
- Differential Equation QuestionsDocument2 pagesDifferential Equation QuestionsMNEMOSYNNE BUENONo ratings yet
- Nptel 1Document57 pagesNptel 1Lanku J GowdaNo ratings yet
- CH 5Document56 pagesCH 5Jesús Javier Santana PerezNo ratings yet
- Assignment 01Document3 pagesAssignment 01Hasan ShahrierNo ratings yet
- Final Exam Calculus 1 PDFDocument4 pagesFinal Exam Calculus 1 PDFGhufran MusaNo ratings yet
- Ch17 Curve FittingDocument44 pagesCh17 Curve FittingSandip GaikwadNo ratings yet
- Lesson 1: Inverse Trigonometric FunctionDocument3 pagesLesson 1: Inverse Trigonometric FunctionNeko- kunNo ratings yet
- Control Systems Theory: Reduction of Multiple Subsystems STB 35103Document45 pagesControl Systems Theory: Reduction of Multiple Subsystems STB 35103Ayub Abd RahmanNo ratings yet
- Laplace Transform (Notes)Document23 pagesLaplace Transform (Notes)Alex OsesNo ratings yet
- Probability and StatisticsDocument3 pagesProbability and StatisticsBVS CollegesNo ratings yet
- CHAPTER 6 NUmerical DifferentiationDocument6 pagesCHAPTER 6 NUmerical DifferentiationEdbert TulipasNo ratings yet
- Topic 1 InequalitiesDocument10 pagesTopic 1 InequalitiesMohd Hafiz AyubNo ratings yet
- Chapter 4 Capitalized CostDocument11 pagesChapter 4 Capitalized CostUpendra ReddyNo ratings yet
- Full Text of Results Electrical Engineering Board ExamDocument3 pagesFull Text of Results Electrical Engineering Board ExamTheSummitExpress100% (1)
- Mechanics - MathalinoDocument11 pagesMechanics - MathalinoJizelle De Leon JumaquioNo ratings yet
- Cosine, Sine and Tangent of Multiple Angles (Recursive Formula)Document5 pagesCosine, Sine and Tangent of Multiple Angles (Recursive Formula)Toyen BlakeNo ratings yet
- Codes Final 2005Document93 pagesCodes Final 2005mjrahimiNo ratings yet
- Clar, Steve E. Exercise 2a: Boolean AlgebraDocument5 pagesClar, Steve E. Exercise 2a: Boolean AlgebraSteve ClarNo ratings yet
- MathDocument26 pagesMathDenmark Mateo SantosNo ratings yet
- E303 Transverse WaveDocument6 pagesE303 Transverse WaveApril SaccuanNo ratings yet
- Experiment 4Document10 pagesExperiment 4djelbouNo ratings yet
- Emu Phys102 Lecture NotesDocument127 pagesEmu Phys102 Lecture NotesmikeNo ratings yet
- Solutions PDEDocument5 pagesSolutions PDERizwan 106No ratings yet
- Tut 5 On PDEsDocument6 pagesTut 5 On PDEsRohan ZendeNo ratings yet
- Exercises For TFFY54Document25 pagesExercises For TFFY54sattar28No ratings yet
- CH605 2023 24tutorial3Document2 pagesCH605 2023 24tutorial3NeerajNo ratings yet
- Practice - Questions - 2, System ScienceDocument3 pagesPractice - Questions - 2, System ScienceSONUNo ratings yet
- C P - PH 354: Omputational HysicsDocument14 pagesC P - PH 354: Omputational HysicsAthira GopalNo ratings yet
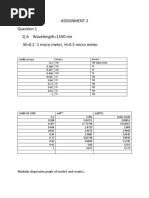
- Assignment 2 1) A Wavelength 1550 NM W 0.2 - 1 Micro Meter, H 0.5 Micro MeterDocument13 pagesAssignment 2 1) A Wavelength 1550 NM W 0.2 - 1 Micro Meter, H 0.5 Micro MeterAthira GopalNo ratings yet
- Sponataneous Symmetry BreakingDocument16 pagesSponataneous Symmetry BreakingAthira Gopal100% (1)
- Week 12-14Document54 pagesWeek 12-14Sohaib IrfanNo ratings yet
- Assignment - 3Document2 pagesAssignment - 3Gunda Venkata SaiNo ratings yet
- Basic Accounting Terminology 101Document2 pagesBasic Accounting Terminology 101ahmie banezNo ratings yet
- CONDITIONALSIf Only It Were TrueDocument3 pagesCONDITIONALSIf Only It Were TrueEmma PeelNo ratings yet
- Question Bank BE and B TECH First YearDocument138 pagesQuestion Bank BE and B TECH First YearRukman Divya SNo ratings yet
- Erwc Self Ass GoalsDocument1 pageErwc Self Ass Goalsapi-340395705No ratings yet
- 9-Cu Sinif Buraxılış Tipli Sınaq 1Document4 pages9-Cu Sinif Buraxılış Tipli Sınaq 1ruslanpadarov603No ratings yet
- Installing and Licensing Actix SolutionsDocument30 pagesInstalling and Licensing Actix SolutionsVượng Phú ĐỗNo ratings yet
- Comparative Law and Legal TranslationDocument5 pagesComparative Law and Legal TranslationLiubov Lucas0% (1)
- Santiago - de - Murcias - Cifras - Selectas - de - Guitarra (Arrastrado) 4Document1 pageSantiago - de - Murcias - Cifras - Selectas - de - Guitarra (Arrastrado) 4EduardoCordonNo ratings yet
- Project Facilities BDocument6 pagesProject Facilities Bijhbfa0% (1)
- 10 Endangered AlphabetsDocument2 pages10 Endangered AlphabetsThe Lazy BearNo ratings yet
- Southeast Asia Treaty Organization (SEATO) : AbbreviationDocument6 pagesSoutheast Asia Treaty Organization (SEATO) : AbbreviationChemist ChemistNo ratings yet
- Cloud Computing YasirDocument3 pagesCloud Computing Yasiryasir shahNo ratings yet
- Many People Are Copying Famous Celebrities From Magazines and TVDocument1 pageMany People Are Copying Famous Celebrities From Magazines and TVkasospy1No ratings yet
- Research-Work-in-Contracts (1)Document1 pageResearch-Work-in-Contracts (1)Angelica BernabeNo ratings yet
- Sps Nilo ChaDocument2 pagesSps Nilo ChaChristianneNoelleDeVeraNo ratings yet
- VV - AA. - The Films of Michael HanekeDocument78 pagesVV - AA. - The Films of Michael HanekeMax PérezNo ratings yet
- Week 05Document3 pagesWeek 05Christian Eduardo Bravo EspicheNo ratings yet
- Worksheet in InferencesDocument2 pagesWorksheet in InferencesJennifer RamosNo ratings yet
- English Language A Level Coursework ExamplesDocument7 pagesEnglish Language A Level Coursework Examplesf5df0517100% (2)
- Reviewer Acctg4 PrelimDocument8 pagesReviewer Acctg4 PrelimMicah Mae MarquezNo ratings yet
- Unit-I: Differential Equations ofDocument24 pagesUnit-I: Differential Equations ofSai PrajitNo ratings yet
- The Power of The Crowd: When Designing A Conference, Keep in Mind ThatDocument5 pagesThe Power of The Crowd: When Designing A Conference, Keep in Mind ThatRuud JanssenNo ratings yet
- Fire Service Assessment Centers:: Beyond The BooksDocument10 pagesFire Service Assessment Centers:: Beyond The BooksmarymariedNo ratings yet
- Filters in Radio FrequencyDocument29 pagesFilters in Radio Frequencyracman94No ratings yet
- Hermann Nitsch AbreaktionsspielDocument6 pagesHermann Nitsch AbreaktionsspielN. HolmesNo ratings yet