Dynamic Analysis of Op-Amp
Dynamic Analysis of Op-Amp
Download as pdf or txt
You might also like
- A Song of Ice and Fire A Game of Thrones (Ebook) (PDF Library)Document6 pagesA Song of Ice and Fire A Game of Thrones (Ebook) (PDF Library)Jeremiel Jeremi0% (5)
- Physics Annual PlanDocument60 pagesPhysics Annual Plan112233445566778899 998877665544332211100% (2)
- Fuel Regression Rate Characterization Using A Laboratory Scale Nitrous Oxide Hybrid Propulsion SystemDocument16 pagesFuel Regression Rate Characterization Using A Laboratory Scale Nitrous Oxide Hybrid Propulsion Systemnumaidecat100% (1)
- Measurements Assignment Three FinalDocument8 pagesMeasurements Assignment Three FinalByonabye MosesNo ratings yet
- Shaft Design FormulasDocument2 pagesShaft Design FormulasNoriel FelicianoNo ratings yet
- Formula Sheet: Types of MaterialDocument3 pagesFormula Sheet: Types of MaterialdaraNo ratings yet
- IM BrakingDocument10 pagesIM BrakingABCNo ratings yet
- Steady State ErrorDocument4 pagesSteady State ErrorAhmed KhaledNo ratings yet
- Correc Exe1Document1 pageCorrec Exe1SOUFIANE BOURCHIHNo ratings yet
- First Order Circuits - RC and RLDocument22 pagesFirst Order Circuits - RC and RLTyspoNo ratings yet
- Exercice MoufidDocument2 pagesExercice MoufidTEST - TESTNo ratings yet
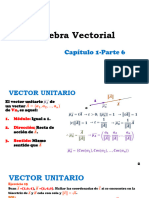
- Álgebra Vectorial 2Document12 pagesÁlgebra Vectorial 2Alex1221No ratings yet
- Coletânea Edmundo - Problema 02 (31-10-2023)Document2 pagesColetânea Edmundo - Problema 02 (31-10-2023)Luiz Antonio Ponce AlonsoNo ratings yet
- The First Fundamental Theorem of Calculus Second Fundamental Theorem of CalculusDocument7 pagesThe First Fundamental Theorem of Calculus Second Fundamental Theorem of Calculuskierby sanbagrielNo ratings yet
- Formulario MTBF Calcular La Probabilidad de Falla Estadística Por: . + .Document3 pagesFormulario MTBF Calcular La Probabilidad de Falla Estadística Por: . + .Eduardo Torres PinoNo ratings yet
- 𝑊 (𝐹⃗) = F ⃗⃗ × AB ⃗⃗⃗⃗⃗⃗ 𝑊 (𝐹⃗) = F. AB. cos αDocument4 pages𝑊 (𝐹⃗) = F ⃗⃗ × AB ⃗⃗⃗⃗⃗⃗ 𝑊 (𝐹⃗) = F. AB. cos αdrissboum1bacNo ratings yet
- AER602 SummaryDocument2 pagesAER602 Summarymuhammad.shibl.imamNo ratings yet
- Hormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToDocument10 pagesHormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToLuis Fabian Mendoza SuárezNo ratings yet
- Álgebra VectorialDocument6 pagesÁlgebra VectorialAlex1221No ratings yet
- Shunt Voltage RegulatorDocument4 pagesShunt Voltage RegulatorSamuel mutindaNo ratings yet
- Applications of Bernoulli’s Theorem_student_notesDocument18 pagesApplications of Bernoulli’s Theorem_student_notesbrianthiru04No ratings yet
- Distillation CSTR RaviDocument6 pagesDistillation CSTR RaviMovie 4UNo ratings yet
- Aircraft Performance & Stability. (1)Document8 pagesAircraft Performance & Stability. (1)alifadhil199898No ratings yet
- CalculusDocument16 pagesCalculusapi-662361166No ratings yet
- Formula Sheet FE - W21Document3 pagesFormula Sheet FE - W21debbyNo ratings yet
- ElectronicsDocument57 pagesElectronicsYashodha SNo ratings yet
- PPG MLRM Upto Autocorr PDFDocument20 pagesPPG MLRM Upto Autocorr PDFReetom GhoshNo ratings yet
- Etude de ContreventementDocument3 pagesEtude de ContreventementFati MaNo ratings yet
- قواعد التكامل PDFDocument4 pagesقواعد التكامل PDFريانNo ratings yet
- NRmethodDocument12 pagesNRmethoddheyaaNo ratings yet
- Free Convection PDFDocument9 pagesFree Convection PDFaditya a pNo ratings yet
- DE5.1Document1 pageDE5.1Shara ZeynNo ratings yet
- Hagen Poisuille EquationDocument4 pagesHagen Poisuille EquationRochakNo ratings yet
- TRK Latihan 1 Foggler 11a PFRDocument4 pagesTRK Latihan 1 Foggler 11a PFRHasbi AsshidiqiNo ratings yet
- Ex 2 Two Hinge ArchDocument3 pagesEx 2 Two Hinge ArchchandrasekarNo ratings yet
- Remember Basic Closed Loop Amplifier: An Op-Amp With Negative Feedback (A Non-Inverting Amplifier)Document3 pagesRemember Basic Closed Loop Amplifier: An Op-Amp With Negative Feedback (A Non-Inverting Amplifier)ruukiNo ratings yet
- Lec2 NotesDocument26 pagesLec2 Notesameya1981No ratings yet
- Derivation of Process Calculation For Ideal GasesDocument19 pagesDerivation of Process Calculation For Ideal GasesMuhammad AbdullahNo ratings yet
- PruebaDocument6 pagesPruebamaquina1No ratings yet
- DR Lara Abou Orm Calculus III Hyperbolic Functions, Inverse Trigonometric Functions, SeriesDocument4 pagesDR Lara Abou Orm Calculus III Hyperbolic Functions, Inverse Trigonometric Functions, SeriesIsmael hijaziNo ratings yet
- T-Ecet210lec HW4 SumayaDocument2 pagesT-Ecet210lec HW4 SumayaMigsNo ratings yet
- Midpoint: Vector Between Two PointsDocument3 pagesMidpoint: Vector Between Two Pointsali alkassemNo ratings yet
- Tarea #1: Amplificadores Cascodes.: Sonny Dominique Ceja CelisDocument5 pagesTarea #1: Amplificadores Cascodes.: Sonny Dominique Ceja Celisshaaron ceja celisNo ratings yet
- Lecture-015 Stokes Theorem Class Lecture StudentDocument13 pagesLecture-015 Stokes Theorem Class Lecture Studentarnabnghs2004No ratings yet
- Lecture2 v1Document36 pagesLecture2 v1Kathérine JosephNo ratings yet
- Assignment - Astrophysics2 - BookletDocument4 pagesAssignment - Astrophysics2 - Bookletkoulickchakraborty5555No ratings yet
- Formulario Series de FourierDocument2 pagesFormulario Series de FourierItzan Charbel Flores BravoNo ratings yet
- Modelling of Stability LandscapeDocument9 pagesModelling of Stability LandscapeNarendra2No ratings yet
- CHE 330 Example For Annulus FlowDocument4 pagesCHE 330 Example For Annulus FlowShodmon TolibovNo ratings yet
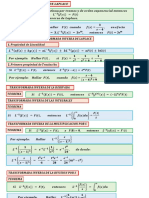
- Clase 11 - Mat IV - Transformada de LaplaceDocument9 pagesClase 11 - Mat IV - Transformada de LaplaceYAN ELIO MANRIQUE MOGOLLONNo ratings yet
- Design of C Section Purlin: From Table C Section (D, TW, Ix, ZX, Zy, SX, Sy)Document1 pageDesign of C Section Purlin: From Table C Section (D, TW, Ix, ZX, Zy, SX, Sy)magdy bakryNo ratings yet
- Fuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andDocument1 pageFuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andJuan David CastañoNo ratings yet
- Clase 4 - Mate IV - Ecuaciones LinealesDocument17 pagesClase 4 - Mate IV - Ecuaciones LinealesPæül AlarconNo ratings yet
- Hormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToDocument1 pageHormigón Simple Hormigón Reforzado Y Recu Brimien To Hormigón Simple Con Refu Erzos Helicoidal Sin Recu Brimien ToLuis Fabian Mendoza SuárezNo ratings yet
- 3rd Class Hand Note 18.10.21 DADocument5 pages3rd Class Hand Note 18.10.21 DAgtgtdfgfdgNo ratings yet
- FormulasDocument2 pagesFormulasRyan MamawagNo ratings yet
- 18 Integration TechniquesDocument18 pages18 Integration Techniquesأيوب عبد الأمير هزبر /تقنية غازNo ratings yet
- Formulario de QuimicaDocument3 pagesFormulario de QuimicaREOMNo ratings yet
- Laplace PPTDocument172 pagesLaplace PPTRama ThombareNo ratings yet
- Formulario N 1 (Algebra)Document1 pageFormulario N 1 (Algebra)Moises Mamani BarcoNo ratings yet
- Chap2 Thermodynamics 5 2Document29 pagesChap2 Thermodynamics 5 2vfg4tyj9gtNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- AIMO 2016 Trial G7 PaperDocument4 pagesAIMO 2016 Trial G7 PaperHary PurbowoNo ratings yet
- Design and Implementation of IoT Based Cricket Ball For Performance Improvisation of The PlayerDocument6 pagesDesign and Implementation of IoT Based Cricket Ball For Performance Improvisation of The PlayerRajalakshmi MohandhossNo ratings yet
- Boq Ductable AirconditionerDocument3 pagesBoq Ductable AirconditionerAPNIT MISHRANo ratings yet
- TOEFL iBT Reading Practice Sets (For Test Takersss)Document7 pagesTOEFL iBT Reading Practice Sets (For Test Takersss)Guille CastanedaNo ratings yet
- Specific Osteology: Skeleton Axiale - Cranium (Skull) - Truncus (Trunk)Document46 pagesSpecific Osteology: Skeleton Axiale - Cranium (Skull) - Truncus (Trunk)Defi Sofianti AnnoNo ratings yet
- SPI Serial Eeproms: FeaturesDocument15 pagesSPI Serial Eeproms: FeaturesMarcus SilvaNo ratings yet
- Dyeing of Knitted Fabrics PDFDocument7 pagesDyeing of Knitted Fabrics PDFAhmed AksarNo ratings yet
- Lea - Notes On Industrial Security ConceptsDocument45 pagesLea - Notes On Industrial Security ConceptsRODOLFO JR. CASTILLO100% (1)
- The AlchemistDocument57 pagesThe Alchemistok100% (2)
- How To Choose MuhurtamDocument52 pagesHow To Choose Muhurtamprk.sandeep724275% (4)
- Single Point Lesson - The Role of A Maintenance Planner PDFDocument3 pagesSingle Point Lesson - The Role of A Maintenance Planner PDFpradeep1987coolNo ratings yet
- L14 Open Channel Flow - Part 2 PDFDocument5 pagesL14 Open Channel Flow - Part 2 PDFainaNo ratings yet
- Drug StudyDocument2 pagesDrug Studyjennelyn losantaNo ratings yet
- Price List W.E.F 1 June 2021: Authorized Channel PartnerDocument49 pagesPrice List W.E.F 1 June 2021: Authorized Channel Partnerkarthik achudhanNo ratings yet
- Stocking density optimization and its impact on growth and physiological responses of Nile tilapia (Oreochromis niloticus) reared in hybrid biofloc-RAS culture systemDocument10 pagesStocking density optimization and its impact on growth and physiological responses of Nile tilapia (Oreochromis niloticus) reared in hybrid biofloc-RAS culture systemJoko AjiNo ratings yet
- Hybrid Ceramic Ball BearingsDocument15 pagesHybrid Ceramic Ball BearingsManish PatilNo ratings yet
- CTC 070 AnswerbookDocument55 pagesCTC 070 AnswerbookGoutam SahaNo ratings yet
- Dosing Pump Innovata Drive ConceptDocument5 pagesDosing Pump Innovata Drive ConceptgarpNo ratings yet
- MECE 2334 Final ExamDocument9 pagesMECE 2334 Final Examdroblesb91No ratings yet
- MDI 120EN - Safety GuideDocument6 pagesMDI 120EN - Safety GuideRaphael LinoNo ratings yet
- Ambo University: Regulation and ControlDocument20 pagesAmbo University: Regulation and ControlFikadu EshetuNo ratings yet
- Lab Report 1 Iwa 282Document25 pagesLab Report 1 Iwa 282Lp NgNo ratings yet
- Keep 504Document14 pagesKeep 504Prachi KaushikNo ratings yet
- Exercise 4Document5 pagesExercise 4John Michael Capulla CadienteNo ratings yet
- Industrial Training ReportDocument28 pagesIndustrial Training ReportIdowu OjoNo ratings yet
- WM-SD - Cross Docking FunctionalityDocument3 pagesWM-SD - Cross Docking FunctionalityDrcytoNo ratings yet
- Wedding Banquet Discussion QuestionsDocument3 pagesWedding Banquet Discussion QuestionsSheriNo ratings yet