Download as pdf or txt
You might also like
- 10 Audi - A8 - QSB - WEBDocument102 pages10 Audi - A8 - QSB - WEBEduardo Ramos100% (2)
- Classic Car Parts Catalog 2017Document176 pagesClassic Car Parts Catalog 2017Performance Online100% (5)
- Gen 5 DD15 Platform Workshop Manual (DDC-SVC-MAN-0215)Document7 pagesGen 5 DD15 Platform Workshop Manual (DDC-SVC-MAN-0215)freddy100% (1)
- Hyd Book 2Document269 pagesHyd Book 2hanifpanja100% (1)
- Feedbacks in Hydraulic Servo Systems RydbergDocument21 pagesFeedbacks in Hydraulic Servo Systems Rydbergc1ronNo ratings yet
- Bul 36115 Servo Valve OperationDocument12 pagesBul 36115 Servo Valve Operationrikkitech100% (2)
- Basic HydraulicsDocument53 pagesBasic Hydraulicsabhinay02meNo ratings yet
- Servo Valve CircuitDocument10 pagesServo Valve Circuitsingh1582100% (1)
- Lecture 0 Appendix Intro Fluid PowerDocument61 pagesLecture 0 Appendix Intro Fluid PowerSAMUEL MAKATANE100% (1)
- Industrial Hydraulic CircuitsDocument16 pagesIndustrial Hydraulic Circuitskingkaking100% (1)
- HYdraulics Lab Manual - New1Document115 pagesHYdraulics Lab Manual - New1Fati Mah100% (3)
- High Precision Position Control of Electro-Hydraulic Servo SystemDocument10 pagesHigh Precision Position Control of Electro-Hydraulic Servo Systemamin342No ratings yet
- FLUID POWER Theory and Applications ThirDocument532 pagesFLUID POWER Theory and Applications ThirDario Garcia ZarazuaNo ratings yet
- Yuken Directional Control ValvesDocument193 pagesYuken Directional Control ValvesphaindikaNo ratings yet
- CH 21 AnswersDocument26 pagesCH 21 AnswersArjav Desai100% (1)
- Session 12 en Logic Element-Cartridge Valve NoRestrictionDocument5 pagesSession 12 en Logic Element-Cartridge Valve NoRestrictionahmed elkhouly100% (2)
- Hydraulis All BVKDocument149 pagesHydraulis All BVKgotu123100% (1)
- Dynamic Analysis of Hydraulic DrivesDocument50 pagesDynamic Analysis of Hydraulic DrivesAnonymous Hy5Ir9QXNo ratings yet
- Hydraulic Circuits - 2 BackupDocument13 pagesHydraulic Circuits - 2 BackupklashincoviskyNo ratings yet
- Fluid Power, Mechatronics, and ControlDocument31 pagesFluid Power, Mechatronics, and ControlVinoth KumarNo ratings yet
- ME080 Section 2 - Types of Hydraulic CircuitsDocument55 pagesME080 Section 2 - Types of Hydraulic CircuitsAhmed Farag100% (1)
- Lecture 1 - Fluid Power - An Introduction PDFDocument40 pagesLecture 1 - Fluid Power - An Introduction PDFbmdbmdbmd100% (1)
- 7 - DirectionvalvesDocument48 pages7 - DirectionvalvesMohamed ZahranNo ratings yet
- Lab Manual-H & P-1me2603Document40 pagesLab Manual-H & P-1me2603Hi hello100% (1)
- Overcenter ValvesDocument4 pagesOvercenter ValvesAnonymous jSTkQVC27b100% (1)
- ME597 Lecture1 11Document33 pagesME597 Lecture1 11Tihomir Markovic100% (1)
- Servo Solenoid ValvesDocument204 pagesServo Solenoid Valveschandushar1604100% (1)
- Basic Hydraulic Circuits - AnalysisDocument49 pagesBasic Hydraulic Circuits - AnalysisMohamed Zahran100% (1)
- Hysteresis Reduction in Hydraulic Proportional Valve ControlDocument58 pagesHysteresis Reduction in Hydraulic Proportional Valve Controlkme100% (1)
- Bulk ModulusDocument4 pagesBulk ModulusBruna MacedoNo ratings yet
- Lecture 17Document16 pagesLecture 17Sourabh MakhamNo ratings yet
- Bulk Modulus 1Document17 pagesBulk Modulus 1rocks100% (1)
- BOOK 2, CHAPTER 1 - Hydraulic Accumulators (Part 3)Document9 pagesBOOK 2, CHAPTER 1 - Hydraulic Accumulators (Part 3)Gonzalo Alvarez100% (2)
- Introduction To Hydraulics For Industry Professionals: Hydraulic Systems Volume 1Document20 pagesIntroduction To Hydraulics For Industry Professionals: Hydraulic Systems Volume 1Narasimha DNo ratings yet
- Circuits - CourseDocument93 pagesCircuits - Coursehasan bish100% (2)
- Unit 2: Load Sensing, Pressure Compensated Hydraulic SystemsDocument19 pagesUnit 2: Load Sensing, Pressure Compensated Hydraulic SystemsMohammed KhalidNo ratings yet
- HPS Notes of Lecture PDFDocument63 pagesHPS Notes of Lecture PDFsbhalesh100% (3)
- Mobile Working Hydraulic System DynamicsDocument107 pagesMobile Working Hydraulic System Dynamicsbr1404100% (2)
- Chapter 7 - Hydraulic Operation Circuit and ApplicationDocument19 pagesChapter 7 - Hydraulic Operation Circuit and ApplicationMuhammad AbdullahNo ratings yet
- HydraulicDocument60 pagesHydraulicAswin100% (1)
- Understanding Schematics: (Return To Table of Contents) 123Document15 pagesUnderstanding Schematics: (Return To Table of Contents) 123bmrajahNo ratings yet
- Solenoid Control Hk66o102Document40 pagesSolenoid Control Hk66o102seaqu3st100% (1)
- Denison Hydraulics Proportional Directional Valves Cetop 07: Series 4DP03-E/HDocument19 pagesDenison Hydraulics Proportional Directional Valves Cetop 07: Series 4DP03-E/Hpostolache mariusNo ratings yet
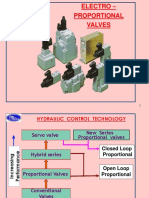
- Electro - Proportional ValvesDocument47 pagesElectro - Proportional Valveshamidouhou100% (1)
- Hydraulic Power Units Vertical Mount Fixed DisplacementDocument32 pagesHydraulic Power Units Vertical Mount Fixed DisplacementSujata Roy100% (1)
- Basic Hydraulic Training ModuleDocument36 pagesBasic Hydraulic Training ModuleVivek Kumar100% (1)
- Secondary Control Technology For Marine WinchDocument9 pagesSecondary Control Technology For Marine WinchxxshNo ratings yet
- Abmaxx Large Modular HPU: Technical InformationDocument16 pagesAbmaxx Large Modular HPU: Technical InformationHanzil HakeemNo ratings yet
- Me55 - Applied Hydraulics & Pneumatics PDFDocument12 pagesMe55 - Applied Hydraulics & Pneumatics PDFPandiya RajanNo ratings yet
- Chapter 4 Control ValveDocument91 pagesChapter 4 Control ValveNebiyou KorraNo ratings yet
- Machinedesign 9779 HydraulicsymbolsDocument6 pagesMachinedesign 9779 HydraulicsymbolsRajesh Kumar100% (1)
- Control Components in Hydraulic SystemsDocument20 pagesControl Components in Hydraulic SystemsfazliNo ratings yet
- Pilot Operated Cartridge Valve - Dynamic Characteristics Measurements For Energy Efficient Operation and ApplicationDocument97 pagesPilot Operated Cartridge Valve - Dynamic Characteristics Measurements For Energy Efficient Operation and ApplicationSaad SaleemNo ratings yet
- Hydraulics and PneumaticsDocument20 pagesHydraulics and Pneumaticsharishme028100% (2)
- Hydrostatic Drive DimensioningDocument23 pagesHydrostatic Drive DimensioningAnonymous 5bDmByBfs100% (1)
- PCE-Training Manual - Day 2-2 GOVERNING SYSTEMS PDFDocument110 pagesPCE-Training Manual - Day 2-2 GOVERNING SYSTEMS PDFhiralalnhpc100% (1)
- System For Optimising Pump Station ControlDocument4 pagesSystem For Optimising Pump Station ControllinNo ratings yet
- Hydraulic-Electric Analogies:: Hydraulic Power Conversion, Part 2Document2 pagesHydraulic-Electric Analogies:: Hydraulic Power Conversion, Part 2Anonymous erirwceNo ratings yet
- Steam Turbine Governing Systems OverviewDocument11 pagesSteam Turbine Governing Systems Overviewdrmsrmurty83% (6)
- 3.control of Electrical DrivesDocument17 pages3.control of Electrical DrivesSimbarashe ChitsungeNo ratings yet
- Eaton Steering Catalog Hydraulic CircuitsDocument6 pagesEaton Steering Catalog Hydraulic Circuitsadam_nell_1No ratings yet
- Impulse Turbine (Fm60)Document6 pagesImpulse Turbine (Fm60)Mintesnot Abera100% (1)
- MCE 4423 Experiment 4 - Efficiency and Performance of A Pelton TurbineDocument16 pagesMCE 4423 Experiment 4 - Efficiency and Performance of A Pelton TurbineMan AlbNo ratings yet
- 610 SK Sales Pitch - BS6Document22 pages610 SK Sales Pitch - BS6Ankur Mestry100% (1)
- Service Manual Rotator XR 500 XR 600Document36 pagesService Manual Rotator XR 500 XR 600Jhan Carlos Pérez HernándezNo ratings yet
- Afrotsion Gondar UniversityDocument9 pagesAfrotsion Gondar UniversityYowhannes TsehayeNo ratings yet
- EN - 2012 Evinrude E-TEC Installation and Predelivery GuideDocument100 pagesEN - 2012 Evinrude E-TEC Installation and Predelivery GuideEnimalistNo ratings yet
- Infiniti MDocument12 pagesInfiniti MRoberto Ortega MicalizziNo ratings yet
- Industrial Policy ResolutionsDocument102 pagesIndustrial Policy ResolutionsRhaegar TargaryenNo ratings yet
- Return To Work: Best Practices and Technology Partner To Tackle The CoronavirusDocument74 pagesReturn To Work: Best Practices and Technology Partner To Tackle The CoronavirusVarga TamasNo ratings yet
- Kappa 2.0 Bosch Motronic M2.10.4 PDFDocument7 pagesKappa 2.0 Bosch Motronic M2.10.4 PDFЛешик ЯNo ratings yet
- AVIC-Z140BH AVIC-X940BT: Installation Manual Manuel DDocument60 pagesAVIC-Z140BH AVIC-X940BT: Installation Manual Manuel DAndres ForeroNo ratings yet
- Document 3a17704 PDFDocument24 pagesDocument 3a17704 PDFAkbarali SulemanNo ratings yet
- Front Brake Disc Replacement PDFDocument3 pagesFront Brake Disc Replacement PDFY. VásquezNo ratings yet
- Ib9 Dual Inputs at 90 Bevel Gearcase: Rotork GearsDocument1 pageIb9 Dual Inputs at 90 Bevel Gearcase: Rotork GearsFederico CazzolliNo ratings yet
- Retarder OilDocument1 pageRetarder OilA TMNo ratings yet
- Instruction Manual: 25cc/1.5 Cu - In. 2-Cycle 17 Inch Cutting Path / 0.080 In. Line Gasoline Weedwaoker ®Document14 pagesInstruction Manual: 25cc/1.5 Cu - In. 2-Cycle 17 Inch Cutting Path / 0.080 In. Line Gasoline Weedwaoker ®jNo ratings yet
- Operation Manual 750-2016Document30 pagesOperation Manual 750-2016sumedha punyaNo ratings yet
- B20ME067 SeminarDocument14 pagesB20ME067 SeminarSanjay 69ffNo ratings yet
- Hydraulic Excavator: Engine DriveDocument36 pagesHydraulic Excavator: Engine DriveGoran MatovicNo ratings yet
- Assignment 0 1 Existing Maintenance in DIMODocument5 pagesAssignment 0 1 Existing Maintenance in DIMOTharanga Perera100% (2)
- NM - FlywheelsDocument6 pagesNM - FlywheelsCarlos ANDRADENo ratings yet
- MPM 312 09 08Document2 pagesMPM 312 09 08Mousa PetrolNo ratings yet
- Integrated Motor Drive Design For An All-Electric BoatDocument9 pagesIntegrated Motor Drive Design For An All-Electric BoatPantoja lopesNo ratings yet
- Advanced Diesel: Forensic Automobile Investigations, IncDocument42 pagesAdvanced Diesel: Forensic Automobile Investigations, IncJason TylerNo ratings yet
- Session 4 Classification of B2B ProductsDocument23 pagesSession 4 Classification of B2B ProductsAaron RodriguesNo ratings yet
- 卡特3516A原理图Document9 pages卡特3516A原理图zhiNo ratings yet
- Power Data Ambient Data: P-Wheel (KW)Document1 pagePower Data Ambient Data: P-Wheel (KW)Andreea NițoiuNo ratings yet
- 3512B - 1500KW - 1875kva - 380V 13800V (2017) (Lehe1250-00)Document9 pages3512B - 1500KW - 1875kva - 380V 13800V (2017) (Lehe1250-00)Darren R. FlorNo ratings yet
- Tesla FinModelDocument58 pagesTesla FinModelPrabhdeep Dadyal100% (1)