Project Embedded System - Design Industrial DC Motor Controller
Project Embedded System - Design Industrial DC Motor Controller
Download as pdf or txt
You might also like
- 06) GSM-BTS Antenna SystemDocument60 pages06) GSM-BTS Antenna SystemAhmadHashemiNo ratings yet
- Ford Model A WiringDocument85 pagesFord Model A WiringKristjan Vildikas100% (2)
- Cone NotesDocument5 pagesCone NotesamirlatNo ratings yet
- Home Assignment #6Document5 pagesHome Assignment #6Phạm Bùi Đình LộcNo ratings yet
- Project Report: Line Following RobotDocument12 pagesProject Report: Line Following RobotAhsan MuradNo ratings yet
- Automatic Colour MixingDocument6 pagesAutomatic Colour MixingharrysinghNo ratings yet
- ECE 271 Lab 1 An Introduction To Modeling, Verilog, and Real World Digital PartsDocument20 pagesECE 271 Lab 1 An Introduction To Modeling, Verilog, and Real World Digital PartsBin BinNo ratings yet
- Max31910evkit Max31911evkitDocument13 pagesMax31910evkit Max31911evkitRody GCNo ratings yet
- DC Motor With Encoder Manual (1.1 W)Document7 pagesDC Motor With Encoder Manual (1.1 W)Saad NajibNo ratings yet
- Chapter 4 PDFDocument11 pagesChapter 4 PDF김채현No ratings yet
- Stepper Motor Driver (74194)Document10 pagesStepper Motor Driver (74194)kizt_mpoeNo ratings yet
- Es35 SW BrochureDocument4 pagesEs35 SW BrochureThái Trung TàiNo ratings yet
- 56 - A Learning Model For 8051 Microcontroller Case Study On Closed Loop DC Motor Speed Control PDFDocument7 pages56 - A Learning Model For 8051 Microcontroller Case Study On Closed Loop DC Motor Speed Control PDFhecirlene vieiraNo ratings yet
- DCM FlybackDocument11 pagesDCM FlybackAaron ShiehNo ratings yet
- Temperature and Humidity Transmitter User Manual: 1. Product DescriptionDocument8 pagesTemperature and Humidity Transmitter User Manual: 1. Product DescriptionNguyễn Huy HoàngNo ratings yet
- MTTCNDocument296 pagesMTTCNCarlosNo ratings yet
- Pic ProjectsDocument6 pagesPic ProjectsAmr GhonemNo ratings yet
- Buck ConverterDocument13 pagesBuck ConverterDinesh MahtoNo ratings yet
- Microcontroller ProgramsDocument49 pagesMicrocontroller ProgramsYagnesh AsharNo ratings yet
- Simulink PLC Coder User's GuideDocument286 pagesSimulink PLC Coder User's GuidepeerawishNo ratings yet
- Advanced View Pic Microcontroller Projects List 1652 - PIC MicrocontrollerDocument175 pagesAdvanced View Pic Microcontroller Projects List 1652 - PIC MicrocontrollerWise TechNo ratings yet
- Ho Vi Dieu Khien 8051 Tong Van OnDocument252 pagesHo Vi Dieu Khien 8051 Tong Van OnbuilenNo ratings yet
- Bidirectional Flyback Inverter WithDocument5 pagesBidirectional Flyback Inverter WithArceu CamposNo ratings yet
- Ijert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariDocument4 pagesIjert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariAvinash Babu KmNo ratings yet
- Analog Electronics-3 PDFDocument39 pagesAnalog Electronics-3 PDFAbhinav Jangra100% (1)
- Tele Traffic LectureDocument18 pagesTele Traffic LectureDramane BonkoungouNo ratings yet
- Final Thesis Paper AutoDocument93 pagesFinal Thesis Paper AutoaprilNo ratings yet
- 840 USE 100 00 v80Document902 pages840 USE 100 00 v80nelsonacuaNo ratings yet
- Control Systems Lab STM32F4Document30 pagesControl Systems Lab STM32F4Williams OrtizNo ratings yet
- A7677S Series Open-SDK Hardware Design - V1.00Document83 pagesA7677S Series Open-SDK Hardware Design - V1.00Nguyen HaNo ratings yet
- PSIM User Manual PDFDocument280 pagesPSIM User Manual PDFHelenio Salvador PizarroNo ratings yet
- 5W USB Flyback Design ReviewApplication ReportDocument21 pages5W USB Flyback Design ReviewApplication ReportleechulmiuNo ratings yet
- PHOTONIC CRYSTAL FIBER Report PDFDocument38 pagesPHOTONIC CRYSTAL FIBER Report PDFGajendra Thakur100% (1)
- Development of A BLDC Motor Drive With Improved Output CharacteristicsDocument4 pagesDevelopment of A BLDC Motor Drive With Improved Output CharacteristicskurlshNo ratings yet
- Mechatronic System Design Line Following RobotDocument37 pagesMechatronic System Design Line Following RobotPhạm Hữu PhướcNo ratings yet
- Robust Fast Terminal SMC With Prescribed Performance For A Wearable Exoskeleton RobotDocument6 pagesRobust Fast Terminal SMC With Prescribed Performance For A Wearable Exoskeleton Robotabdelhamid.ghoul93No ratings yet
- Gyroscope LED Controller STM32F407 DiscoveryDocument21 pagesGyroscope LED Controller STM32F407 DiscoveryAndrei GeorgeNo ratings yet
- DIY ECG Arduino LabView PDFDocument7 pagesDIY ECG Arduino LabView PDFarduino signaux cardiaquesNo ratings yet
- Unit 1Document20 pagesUnit 1Tien NguyenNo ratings yet
- (BS 1041-5-1989) - Temperature Measurement. Guide To Selection and Use of Radiation Pyrometers PDFDocument42 pages(BS 1041-5-1989) - Temperature Measurement. Guide To Selection and Use of Radiation Pyrometers PDFAnonymous Y833nLdDNo ratings yet
- Chapter4-Logical Design of Automation CircuitsDocument41 pagesChapter4-Logical Design of Automation CircuitsCao LoiNo ratings yet
- 9a Button Digital ReadDocument6 pages9a Button Digital ReadTran Ngoc Hong Quan (K16HL)No ratings yet
- BTL VuTrongHau 20202618Document89 pagesBTL VuTrongHau 20202618HauvuNo ratings yet
- Speed Control of DC Motor Using PID Algorithm (STM32F4) : InstructablesDocument10 pagesSpeed Control of DC Motor Using PID Algorithm (STM32F4) : InstructablespedroNo ratings yet
- STM32 Reference ManualDocument1,093 pagesSTM32 Reference Manualthomaslam61No ratings yet
- Sal Institute of Technology and Engineering Reserch Electrical DepartmentDocument1 pageSal Institute of Technology and Engineering Reserch Electrical DepartmentSachin ShikotraNo ratings yet
- Report Week 10Document6 pagesReport Week 10Tiến BùiNo ratings yet
- Buck Boost ConverterDocument32 pagesBuck Boost ConverterJanmejay MohapatraNo ratings yet
- Simple 100W Inverter CircuitDocument4 pagesSimple 100W Inverter Circuitkali prasadNo ratings yet
- Power Supply BlockDocument5 pagesPower Supply Blocknguyenthebach.9hNo ratings yet
- AnalogsDocument11 pagesAnalogsGeralt VesemirNo ratings yet
- Final Circuit ProposalDocument23 pagesFinal Circuit ProposalNAHUM ZERAH SACAYNo ratings yet
- Arduino Power Inverter CircuitsDocument8 pagesArduino Power Inverter CircuitsjuliocastNo ratings yet
- Embedded SystemDocument16 pagesEmbedded Systemdasarajubhavani05No ratings yet
- Current Source ManualDocument19 pagesCurrent Source ManualNikola PetkovicNo ratings yet
- Switch Mode ConvertersDocument28 pagesSwitch Mode ConvertersHemantha KumarNo ratings yet
- Switch Mode ConvertersDocument28 pagesSwitch Mode ConvertersAniruddh KashyapNo ratings yet
- +12V and - 12V Dual Power Supply Circuit DiagramDocument4 pages+12V and - 12V Dual Power Supply Circuit DiagramSimon WongNo ratings yet
- Project Proposal: Description of ProblemDocument10 pagesProject Proposal: Description of ProblemAmit Hossain MallickNo ratings yet
- Placa Fonte Chinesa 0 - 30V - 3ADocument14 pagesPlaca Fonte Chinesa 0 - 30V - 3AKelsen Leão PereiraNo ratings yet
- Voltage Doubler ADocument2 pagesVoltage Doubler AErole Technologies Pvt ltd Homemade EngineerNo ratings yet
- Simple Half-Wave Dipole Antenna Analysis For Wireless Applications by CST Microwave StudioDocument3 pagesSimple Half-Wave Dipole Antenna Analysis For Wireless Applications by CST Microwave Studiotustttt100% (2)
- Manual Re 845 n1Document606 pagesManual Re 845 n1Alejandro Retana EsquivelNo ratings yet
- Ijleo D 19 04677Document19 pagesIjleo D 19 04677sam moufNo ratings yet
- ETP48200 V300R002C00 Training SlidesDocument89 pagesETP48200 V300R002C00 Training SlidesДмитрий СоветовNo ratings yet
- PLANT Material Codification StructureDocument8 pagesPLANT Material Codification StructureAjay Kumar MohiniNo ratings yet
- BP20S3 GDocument5 pagesBP20S3 GbogosingNo ratings yet
- Power System Statistics 45th EditionDocument92 pagesPower System Statistics 45th EditionmuazeemKNo ratings yet
- Ae 1408 Coresense Communications For 13 To 15 Ton Copeland Scroll Air Conditioning Compressors en 5237224Document19 pagesAe 1408 Coresense Communications For 13 To 15 Ton Copeland Scroll Air Conditioning Compressors en 5237224joaoNo ratings yet
- Five Ways To Considerably Lower OPEX Costs For EV Charging NetworksDocument6 pagesFive Ways To Considerably Lower OPEX Costs For EV Charging NetworksTBS Máy Phát ĐiệnNo ratings yet
- Lattice DiagramDocument19 pagesLattice DiagramDDragos GeorgeNo ratings yet
- Catalogue WP-SDC CCR CE (MID)Document3 pagesCatalogue WP-SDC CCR CE (MID)control1y1segu-65318No ratings yet
- Investigations On Three-Phase Transmission LinesDocument6 pagesInvestigations On Three-Phase Transmission LinesandresNo ratings yet
- BT Gis ChecklistDocument3 pagesBT Gis ChecklistMoinullah Khan AteeqNo ratings yet
- PanelView 300 Micro Terminals Installation Instructions - ° ×°Ö ÄÏ PDFDocument116 pagesPanelView 300 Micro Terminals Installation Instructions - ° ×°Ö ÄÏ PDFjaimeasisa100% (1)
- Residential & Commercial ThermostatsDocument9 pagesResidential & Commercial Thermostatsali0% (1)
- Small Signal Analysis of LLC Current Resonant Converters Using Equivalent Source ModelDocument6 pagesSmall Signal Analysis of LLC Current Resonant Converters Using Equivalent Source Modelhsky19748No ratings yet
- Feeder Details ++Document15 pagesFeeder Details ++electricalNo ratings yet
- Fuzzy ThesisDocument101 pagesFuzzy Thesisthirumalai22No ratings yet
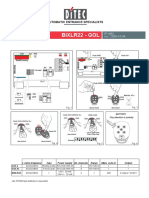
- BIXLR22 Transmitter Instru..Document2 pagesBIXLR22 Transmitter Instru..Ramiro OsorioNo ratings yet
- Data Line - BCM Control SchematicsDocument24 pagesData Line - BCM Control Schematicsdldever01No ratings yet
- Bacteriological Incubator-User ManualDocument4 pagesBacteriological Incubator-User ManualTech LabNo ratings yet
- 12 Physics Notes Ch06 Electromagnetic InductionDocument5 pages12 Physics Notes Ch06 Electromagnetic InductionKOMAL NAVARIYANo ratings yet
- PHMSA 2017 0158 0001 - Attachment - 37Document300 pagesPHMSA 2017 0158 0001 - Attachment - 37Pammy JainNo ratings yet
- Wire Heating in WeldingDocument7 pagesWire Heating in WeldingTEJENDRA SINGH SINGHALNo ratings yet
- Sensor LaserDocument3 pagesSensor LaserAbraham del Hoyo SotoNo ratings yet
- DATA BOOSTER 3412C Marine Engine High Performance 3JK00146-UP (SEBP2969 - 54) - Sistemas y ComponentesDocument8 pagesDATA BOOSTER 3412C Marine Engine High Performance 3JK00146-UP (SEBP2969 - 54) - Sistemas y ComponentesmanuelNo ratings yet
- Gt3 Series On-Grid PV Inverter: Superior EfficiencyDocument2 pagesGt3 Series On-Grid PV Inverter: Superior EfficiencyJose Luis Diaz BolivarNo ratings yet
- COPEN PaperDocument6 pagesCOPEN PaperADABALA SUBRAHMANYAMNo ratings yet