DAA Imran
DAA Imran
Download as pdf or txt
You might also like
- Makkar Ielts Readings Gen FULL E BOOK-compressedDocument274 pagesMakkar Ielts Readings Gen FULL E BOOK-compressedHarsh Vavdiya57% (7)
- ECU PInout Toyota 1NZ-FEDocument6 pagesECU PInout Toyota 1NZ-FEAndres Pari100% (11)
- ATA28, Fuel Dash 8 Q 200Document77 pagesATA28, Fuel Dash 8 Q 200rav100% (1)
- Belize Birth ProcedureDocument4 pagesBelize Birth ProcedureyuritabascoNo ratings yet
- Imran DAA FinalDocument26 pagesImran DAA FinalMd ImranNo ratings yet
- Ada PDFDocument43 pagesAda PDFPrikshit RanaNo ratings yet
- Daa 5Document4 pagesDaa 5Sumit KumarNo ratings yet
- Parth ADA Practical KDocument53 pagesParth ADA Practical KkinjalbenanilbhaisolankiNo ratings yet
- Algo 1Document18 pagesAlgo 1Lameya LumzaNo ratings yet
- Ap3 1Document5 pagesAp3 1Bad BunnyNo ratings yet
- Assignment#1: Design & Analysis of AlgorithmDocument7 pagesAssignment#1: Design & Analysis of AlgorithmArbaz KhanNo ratings yet
- SortingDocument12 pagesSortingYi YinNo ratings yet
- Lab Manual Ds - 2021Document57 pagesLab Manual Ds - 2021Priti PritiNo ratings yet
- Algo 2Document18 pagesAlgo 2Lameya LumzaNo ratings yet
- Lab 8 - SortingDocument12 pagesLab 8 - SortingRuzzidan AliNo ratings yet
- Data Structures Lab Record FormatDocument37 pagesData Structures Lab Record Formatt3137303No ratings yet
- Laboratory Manual: Computer Science and Engineering Internet of Everything Laboratory 203105306 5 SemesterDocument38 pagesLaboratory Manual: Computer Science and Engineering Internet of Everything Laboratory 203105306 5 SemesterHarsha LuckyNo ratings yet
- Computer Science & Engineering Computer Science & EngineeringDocument7 pagesComputer Science & Engineering Computer Science & Engineeringlostinspace981No ratings yet
- DAA 2.1 - SidDocument3 pagesDAA 2.1 - SidSid AwasthiNo ratings yet
- Daa Practical FileDocument49 pagesDaa Practical FileChandan JatNo ratings yet
- Udit - Dumka 1Document32 pagesUdit - Dumka 1Udit DumkaNo ratings yet
- Abinav APS-fileDocument42 pagesAbinav APS-fileHemant KumarNo ratings yet
- Algo Lab Report 1Document10 pagesAlgo Lab Report 1Lameya LumzaNo ratings yet
- ADA ETCS 351 Lab Manual-1Document45 pagesADA ETCS 351 Lab Manual-1Pratham KakkarNo ratings yet
- 095 Priyanshu Mishra, ADA Lab FileDocument20 pages095 Priyanshu Mishra, ADA Lab FilePratham KakkarNo ratings yet
- DSA LabDocument90 pagesDSA LabMahaan nidhiNo ratings yet
- LDRP - Me Ce Daa - Sem 1Document36 pagesLDRP - Me Ce Daa - Sem 1srishtiwariNo ratings yet
- Data Structure Cs 1032 Lab Manual April 2016 6Document43 pagesData Structure Cs 1032 Lab Manual April 2016 6Beta12 SinghNo ratings yet
- Giu 2480 59 11944 2023-06-03T16 14 02Document5 pagesGiu 2480 59 11944 2023-06-03T16 14 02Layan AlqudrahNo ratings yet
- DAA File1Document15 pagesDAA File1gk341440No ratings yet
- DAALab Instructors ManualDocument37 pagesDAALab Instructors Manualdharshinima.ai22No ratings yet
- Fahad Ahmed - B22f0858se040 Lab 05Document5 pagesFahad Ahmed - B22f0858se040 Lab 05fa213069No ratings yet
- 19IT419 3IT01 PracticalFileDocument52 pages19IT419 3IT01 PracticalFileDhruv PurohitNo ratings yet
- LabDocument22 pagesLabArooj FatimaNo ratings yet
- Ds Final Lab ReportDocument52 pagesDs Final Lab Reportzakia.syeed51No ratings yet
- LAB2Document7 pagesLAB2postoroncadumitruNo ratings yet
- Practical 1Document6 pagesPractical 1Worst EditsNo ratings yet
- 18 DaaDocument22 pages18 DaaperiNo ratings yet
- Lab Manual DS StudentFileDocument90 pagesLab Manual DS StudentFileLioNo ratings yet
- LAB3Document17 pagesLAB3Dima GrigorasNo ratings yet
- DSA Lab 10Document15 pagesDSA Lab 10Mahnoor InamNo ratings yet
- ADA Lab ManualDocument28 pagesADA Lab Manualharshkaithwas11No ratings yet
- Experiment Title.: Sorting of ArrayDocument7 pagesExperiment Title.: Sorting of ArrayHarsh BhardwajNo ratings yet
- ArraysDocument21 pagesArraysBalaram PalNo ratings yet
- Daa File Upto 6Document19 pagesDaa File Upto 6Hardik MalviyaNo ratings yet
- FAF233 LAB2 PostoroncaDumitru10Document7 pagesFAF233 LAB2 PostoroncaDumitru10postoroncadumitruNo ratings yet
- Ada LabDocument109 pagesAda LabAman KainturaNo ratings yet
- Analysis and Design of Algorithms Lab FileDocument64 pagesAnalysis and Design of Algorithms Lab FilePankhuri JhambNo ratings yet
- Sem 4 AoADocument90 pagesSem 4 AoAGayatri JethaniNo ratings yet
- CP E221 Midterm LOMUGDANGDocument20 pagesCP E221 Midterm LOMUGDANGJeanbe LomugdangNo ratings yet
- EXP 3.1 FaizanDocument5 pagesEXP 3.1 Faizanspartan 02No ratings yet
- Lab File DaaDocument25 pagesLab File Daamahakmahak49793No ratings yet
- Lab7 DSA BSEE20034Document7 pagesLab7 DSA BSEE20034Muhammad Umer ShakirNo ratings yet
- Lab File-1Document46 pagesLab File-1Hemant KumarNo ratings yet
- Uzma Nisar - 033Document51 pagesUzma Nisar - 033uzma nisarNo ratings yet
- It Lab 1Document55 pagesIt Lab 1ManiNo ratings yet
- Rahul Kushwah 0901io201051 Design & Analysis of Algorithm Pratical FileDocument47 pagesRahul Kushwah 0901io201051 Design & Analysis of Algorithm Pratical FileRAHUL KUSHWAH0% (1)
- DAA PracticalFileDocument31 pagesDAA PracticalFilefreshgammer09No ratings yet
- Tayyab Khan DSA Lab Report 1Document13 pagesTayyab Khan DSA Lab Report 1cigila6437No ratings yet
- 515 DaaDocument38 pages515 DaaNatasha MadnaniNo ratings yet
- Name - Sagar de UNIVERSISTY ROLL - 10931121055 Class Roll - 55 Setion A Semester - 6 Year - 3 ACADEMIC YEAR - 2023-24Document5 pagesName - Sagar de UNIVERSISTY ROLL - 10931121055 Class Roll - 55 Setion A Semester - 6 Year - 3 ACADEMIC YEAR - 2023-24kd14072001No ratings yet
- T3 - Searching SortingDocument20 pagesT3 - Searching SortingAYUSH OM MISHRANo ratings yet
- Certified Penetration Testing ProfessionalDocument5 pagesCertified Penetration Testing Professionaldarknetbot307No ratings yet
- TM044 TG - : CLARK TC C8602-146 REV.1 Assesment SheetDocument5 pagesTM044 TG - : CLARK TC C8602-146 REV.1 Assesment SheetXG WNo ratings yet
- Comprehensive Viva Amit RawatDocument12 pagesComprehensive Viva Amit RawatAmit RawatNo ratings yet
- Presostat Tehnički ListDocument20 pagesPresostat Tehnički Listterhaf89No ratings yet
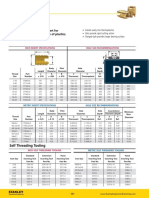
- Dodge Self-Threading Insert For PlasticDocument1 pageDodge Self-Threading Insert For PlasticBarNo ratings yet
- Urkund Report - Plagiarism NOT checkedSHUBHANGI DASH 1720357.docx (D64868194) PDFDocument60 pagesUrkund Report - Plagiarism NOT checkedSHUBHANGI DASH 1720357.docx (D64868194) PDFShetty RakshithNo ratings yet
- Generative AI Opportunity of A LifetimeDocument3 pagesGenerative AI Opportunity of A Lifetimeshubhanwita2021oacNo ratings yet
- DBMS Tutorial (AB)Document10 pagesDBMS Tutorial (AB)Rubik Raj RayNo ratings yet
- High Frequency Power Transistor Ldmos Fet 36.5 DBM, 900 MHZ: Semiconductor Technical DataDocument2 pagesHigh Frequency Power Transistor Ldmos Fet 36.5 DBM, 900 MHZ: Semiconductor Technical DatasergioNo ratings yet
- Pumping Plan: PumpsDocument10 pagesPumping Plan: PumpsMohd AkifNo ratings yet
- Sentiment Analysis PDFDocument4 pagesSentiment Analysis PDFPragathi GowdaNo ratings yet
- Algorithms Lab Ex 5Document8 pagesAlgorithms Lab Ex 5pixaho2996No ratings yet
- DM SyllabusDocument10 pagesDM SyllabusDreamysoles124 Hubby's pinku Princess100% (1)
- Capacitor Voltage TransformerDocument7 pagesCapacitor Voltage Transformerlkt_pestechNo ratings yet
- Delhi To JpdhpurDocument2 pagesDelhi To JpdhpurAnant JainNo ratings yet
- Ug-99 Standard Hydrostatic TestDocument7 pagesUg-99 Standard Hydrostatic TestNícoli GaloNo ratings yet
- Catalogo de Licor Medidor de Area FoliarDocument10 pagesCatalogo de Licor Medidor de Area FoliarJaime ACNo ratings yet
- CH.10 Drawing & DocumentsDocument97 pagesCH.10 Drawing & DocumentsSUDIPTA MANDAL100% (1)
- Blockchain in Real Estate DevelopmentDocument6 pagesBlockchain in Real Estate DevelopmentKashishNo ratings yet
- Pengaruh Infrastruktur Terhadap Sektor Pertanian Di Pulau Sumatera Zakiah Wilis Subroto, Diana SaphaDocument13 pagesPengaruh Infrastruktur Terhadap Sektor Pertanian Di Pulau Sumatera Zakiah Wilis Subroto, Diana SaphaMarlina SaotaNo ratings yet
- Blockchain NetworkDocument3 pagesBlockchain NetworkdhoniNo ratings yet
- Experiment 2 Directives - Indicates How An Operand or Section of A Program Is To Be Processed by TheDocument7 pagesExperiment 2 Directives - Indicates How An Operand or Section of A Program Is To Be Processed by TheCasandra Victorio Kua RNNo ratings yet
- MRE028Document1 pageMRE028Alex DonciuNo ratings yet
- Education: Curriculum VitaeDocument5 pagesEducation: Curriculum Vitaeinformatiquehageryahoo.frNo ratings yet
- Final Thesis Presentation MariyamDocument48 pagesFinal Thesis Presentation MariyamFatima SafdarNo ratings yet
- SettingsproviderDocument28 pagesSettingsprovidereducraft wickNo ratings yet