0% found this document useful (0 votes)
121 viewsTopic 7. VAR Models
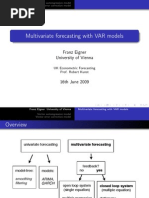
The document discusses vector autoregressive (VAR) models, which relate current observations of a variable with past observations of itself and other variables in a system. VAR models allow feedback between variables and are useful for forecasting, establishing causal relationships, and simulating shocks to trace their effects. The document outlines reduced form, recursive, and structural VAR models, explaining their specifications, estimation, and use for inference, forecasting, and evaluating variable interrelationships through Granger causality, impulse response functions, and forecast error decompositions.
Uploaded by
Tuấn ĐinhCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
121 viewsTopic 7. VAR Models
The document discusses vector autoregressive (VAR) models, which relate current observations of a variable with past observations of itself and other variables in a system. VAR models allow feedback between variables and are useful for forecasting, establishing causal relationships, and simulating shocks to trace their effects. The document outlines reduced form, recursive, and structural VAR models, explaining their specifications, estimation, and use for inference, forecasting, and evaluating variable interrelationships through Granger causality, impulse response functions, and forecast error decompositions.
Uploaded by
Tuấn ĐinhCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 44