03 - MPI - SHU (Usama)
03 - MPI - SHU (Usama)
Download as pdf or txt
You might also like
- Final Course Outline Programming FundamentalsDocument11 pagesFinal Course Outline Programming FundamentalsZeeshan Jutt0% (1)
- SE Case StudyDocument33 pagesSE Case StudyChirag SharmaNo ratings yet
- Electric Circuits Nilsson - Riedel 7th Solution Cap 11Document8 pagesElectric Circuits Nilsson - Riedel 7th Solution Cap 11elgrankanNo ratings yet
- 4 Digital Signal Processing in Simulink 2007 PDFDocument58 pages4 Digital Signal Processing in Simulink 2007 PDFhananel_forosNo ratings yet
- Experiment - 3: Aim: Using 8051 Generate Square Wave Having 50% and 75% Duty Cycle andDocument3 pagesExperiment - 3: Aim: Using 8051 Generate Square Wave Having 50% and 75% Duty Cycle andDevashishGuptaNo ratings yet
- Linear Dynamic Systems and Signals 1Document4 pagesLinear Dynamic Systems and Signals 1isma8070% (2)
- Employment Form - Ver 1.2Document4 pagesEmployment Form - Ver 1.2Mohd Nafees AnsariNo ratings yet
- Automatic Medicine Vending Machine: Problem StatementDocument8 pagesAutomatic Medicine Vending Machine: Problem StatementRudresh RakeshNo ratings yet
- Control Lab 05Document16 pagesControl Lab 05Zia Ayub100% (1)
- Computer Exercise 5: Recursive Least Squares (RLS)Document6 pagesComputer Exercise 5: Recursive Least Squares (RLS)Robi KhanNo ratings yet
- DSP Term ProjectDocument4 pagesDSP Term ProjectKrunal PatelNo ratings yet
- CountersDocument36 pagesCountersPushan Kumar DattaNo ratings yet
- Adaptive Signal Processing Lecture NoteDocument13 pagesAdaptive Signal Processing Lecture NoteprakashroutNo ratings yet
- Advantages of FFT Over DFTDocument1 pageAdvantages of FFT Over DFTUbaid RaufNo ratings yet
- Signal and System LabsDocument158 pagesSignal and System LabsAbdur RahmanNo ratings yet
- Lab 7Document6 pagesLab 7Tooba KhanNo ratings yet
- Solution Manual Tanjiang 3rd Part1Document128 pagesSolution Manual Tanjiang 3rd Part1Ehsan Alhawaj100% (1)
- Homework 1Document18 pagesHomework 1Migurdia RoxyNo ratings yet
- Amplitude Modulation Modulation Full ChapterDocument96 pagesAmplitude Modulation Modulation Full ChapterMohamed shabanaNo ratings yet
- Adaptive FilterDocument35 pagesAdaptive FilterSimranjeet Singh100% (2)
- Lab Report 6: Digital System and ProcessingDocument8 pagesLab Report 6: Digital System and ProcessingareejNo ratings yet
- MIMO OFDM Program ListDocument3 pagesMIMO OFDM Program ListSandip GajeraNo ratings yet
- Optical Fibre Matlab ThesisDocument30 pagesOptical Fibre Matlab ThesisRaviNo ratings yet
- Soft Computing Question PaperDocument2 pagesSoft Computing Question PaperAnonymous 4bUl7jzGqNo ratings yet
- 49) Wireless Communications For Everybody-Yonsai University PDFDocument1 page49) Wireless Communications For Everybody-Yonsai University PDFDr Alla SrivaniNo ratings yet
- T 7.2.1.4 Applied Amplitude ModulationDocument32 pagesT 7.2.1.4 Applied Amplitude ModulationBlademir Parra GayosoNo ratings yet
- Sequential Decoding by Stack AlgorithmDocument9 pagesSequential Decoding by Stack AlgorithmRam Chandram100% (1)
- Telecom Business Information System AbstractDocument5 pagesTelecom Business Information System AbstractTelika RamuNo ratings yet
- Back PropagationDocument56 pagesBack PropagationmartinezNo ratings yet
- KS Chapter 5 FIR Filter DesignDocument55 pagesKS Chapter 5 FIR Filter DesigndanielNo ratings yet
- Lab 05-Study of Systems Using MATLABDocument7 pagesLab 05-Study of Systems Using MATLABSobia ShakeelNo ratings yet
- Notes On Logic Gates - Basic Logic GatesDocument7 pagesNotes On Logic Gates - Basic Logic GatesMahmuda RahmanNo ratings yet
- Fpga Implementation of Binary Search 1Document5 pagesFpga Implementation of Binary Search 1Araneesh RajanNo ratings yet
- Signal Transmission Through Linear SystemsDocument16 pagesSignal Transmission Through Linear Systemsapnrao100% (3)
- Matlab Project Section B1Document50 pagesMatlab Project Section B1Biruk TadesseNo ratings yet
- Unit 2 - Gate Level ModellingDocument48 pagesUnit 2 - Gate Level Modellingdave vegafriaNo ratings yet
- Unit - 5 - Multiple Antenna TechniquesDocument65 pagesUnit - 5 - Multiple Antenna TechniquesDORAIRAJ ADARSH Y UEC19132No ratings yet
- Microprocessor ProgramDocument97 pagesMicroprocessor ProgramPaulNo ratings yet
- Names:-Ali Nawaz Ranjha Muhammad Anas Younas Usman Naseer Registeration # DDP-FA10-BTE-008 DDP-FA10-BTE-030 DDP-FA10-BTE-053Document8 pagesNames:-Ali Nawaz Ranjha Muhammad Anas Younas Usman Naseer Registeration # DDP-FA10-BTE-008 DDP-FA10-BTE-030 DDP-FA10-BTE-053Aamir JavedNo ratings yet
- ECL333 - Ktu QbankDocument7 pagesECL333 - Ktu QbankRoshith KNo ratings yet
- COSC - 3104 - Compiler Construction, 16-Weeks Plan Course OutlineDocument6 pagesCOSC - 3104 - Compiler Construction, 16-Weeks Plan Course Outlineab2478037100% (1)
- Lab 04Document7 pagesLab 04Sobia ShakeelNo ratings yet
- Module 3.A IEC Language SFCDocument31 pagesModule 3.A IEC Language SFCmarcelodias99No ratings yet
- Ma6351 Tpde PDFDocument295 pagesMa6351 Tpde PDFNe En JoviNo ratings yet
- Power Divider, Combiner and CouplerDocument60 pagesPower Divider, Combiner and Couplergaurav_juneja_4No ratings yet
- Analog and Digital CommunicationDocument51 pagesAnalog and Digital CommunicationamitmnlNo ratings yet
- 16 Channel Relay Board PDFDocument1 page16 Channel Relay Board PDFVirulancetubeNo ratings yet
- IMS (IP Multimedia Subsystem)Document8 pagesIMS (IP Multimedia Subsystem)mpscr100% (1)
- ECE3073 P8 Compilation Answers PDFDocument7 pagesECE3073 P8 Compilation Answers PDFkewancamNo ratings yet
- EAC533 - LCS - Assignment I QuestionDocument2 pagesEAC533 - LCS - Assignment I Questionmeseret sisayNo ratings yet
- DSP Lab Manual 2018-19 PrintCopy MANUDocument81 pagesDSP Lab Manual 2018-19 PrintCopy MANUNikhila BadriNo ratings yet
- DSP Final 21-22Document4 pagesDSP Final 21-22Mertkan AkayNo ratings yet
- Design of IIR Filters: Difference Method, and The Bilinear Z-TransformDocument10 pagesDesign of IIR Filters: Difference Method, and The Bilinear Z-TransformTsega TeklewoldNo ratings yet
- Lab 7 FM POCDocument7 pagesLab 7 FM POCSPARK LIGHTSNo ratings yet
- Homework II Exercise Section 1.3Document1 pageHomework II Exercise Section 1.3jriver64No ratings yet
- Question BankDocument7 pagesQuestion BankraghuvsbNo ratings yet
- Spring in J2EE: - Exploring Different Features of SpringDocument20 pagesSpring in J2EE: - Exploring Different Features of SpringNarayan UbraniNo ratings yet
- Complex Engineering Problem DCS 2020Document1 pageComplex Engineering Problem DCS 2020tasibkhanNo ratings yet
- OSI Model LayersDocument3 pagesOSI Model LayersKate ResusNo ratings yet
- 05 - Mpi - ShuDocument10 pages05 - Mpi - ShuUsama Javed100% (1)
- 04 - MPI - SHU (Modify)Document14 pages04 - MPI - SHU (Modify)Usama Javed100% (1)
- 02 - Mpi - ShuDocument15 pages02 - Mpi - ShuUsama JavedNo ratings yet
- Functional Programming with C#: Unlock coding brilliance with the power of functional magicFrom EverandFunctional Programming with C#: Unlock coding brilliance with the power of functional magicNo ratings yet
- 02 - Mpi - ShuDocument15 pages02 - Mpi - ShuUsama JavedNo ratings yet
- 05 - Mpi - ShuDocument10 pages05 - Mpi - ShuUsama Javed100% (1)
- 04 - MPI - SHU (Modify)Document14 pages04 - MPI - SHU (Modify)Usama Javed100% (1)
- AssignmentDocument11 pagesAssignmentUsama JavedNo ratings yet
- Lab No4Document5 pagesLab No4Usama JavedNo ratings yet
- 03-Circuit Analysis LabDocument9 pages03-Circuit Analysis LabUsama JavedNo ratings yet
- Lab Rubrics Assessment Criteria For LabDocument8 pagesLab Rubrics Assessment Criteria For LabUsama JavedNo ratings yet
- Lab ManualDocument24 pagesLab ManualUsama JavedNo ratings yet
- Lab .4 OOp .....Document3 pagesLab .4 OOp .....Usama JavedNo ratings yet
- Lab Manual of BiochemistryDocument19 pagesLab Manual of BiochemistryUsama Javed0% (1)
- Lab8 Lab ManualDocument3 pagesLab8 Lab ManualUsama JavedNo ratings yet
- Operating Instructions GSM ModuleDocument44 pagesOperating Instructions GSM ModuleDavid CurkanNo ratings yet
- RoomCast - Installation Guide - V3.0Document31 pagesRoomCast - Installation Guide - V3.0drone meiNo ratings yet
- Deep Sea Electronics 053-028 Issue 4 Typical Wiring DiagramDocument2 pagesDeep Sea Electronics 053-028 Issue 4 Typical Wiring DiagramBaciu NicolaeNo ratings yet
- HUAWEI Y5 Prime 2018 User Guide - (DRA-LX2&L32, 02, English, Normal)Document70 pagesHUAWEI Y5 Prime 2018 User Guide - (DRA-LX2&L32, 02, English, Normal)Paul EsparagozaNo ratings yet
- Misba Taj - PC 181213Document95 pagesMisba Taj - PC 181213Nisha PatelNo ratings yet
- Dokumen - Tips - mg236b Rfid Keypad PDFDocument4 pagesDokumen - Tips - mg236b Rfid Keypad PDFathrun zalaNo ratings yet
- AB CCMS MobileApp-User Guide-1.1Document21 pagesAB CCMS MobileApp-User Guide-1.1Rakesh Kumar MittapelliNo ratings yet
- ATMDocument5 pagesATMKaladarNo ratings yet
- Online-ATM-Simulator-A-DSA-ProjectDocument8 pagesOnline-ATM-Simulator-A-DSA-Projectmayur2223pNo ratings yet
- F8T User ManualDocument27 pagesF8T User ManualMatias Dacosta NeghmeNo ratings yet
- IT A LevelDocument9 pagesIT A LevelAbraham SiregarNo ratings yet
- ISO 8583 Ed.3 Annex J 063023Document16 pagesISO 8583 Ed.3 Annex J 0630238nqbrwykhvNo ratings yet
- Talent ManagementDocument8 pagesTalent ManagementajayNo ratings yet
- Step by Step Guide To Create ABC IDDocument8 pagesStep by Step Guide To Create ABC IDShahil KumarNo ratings yet
- AtmDocument6 pagesAtmAnkit JandialNo ratings yet
- ATM Service and Customers Satisfaction 30327Document33 pagesATM Service and Customers Satisfaction 30327Kidus GetnetNo ratings yet
- Computer P3roject Python PDFDocument31 pagesComputer P3roject Python PDFRomil TalaichNo ratings yet
- ATM Simulation Code: Operation Description FormsDocument35 pagesATM Simulation Code: Operation Description FormsClaudia StefaniaNo ratings yet
- Kunci B Inggris 11Document12 pagesKunci B Inggris 11nikmatul firzaNo ratings yet
- Visa Debit Card GuideDocument16 pagesVisa Debit Card GuideJann KongNo ratings yet
- Subject: Nafa "Clickpay" ServiceDocument13 pagesSubject: Nafa "Clickpay" ServiceAhmed SyedNo ratings yet
- Nokia E72 User Guide: Cyan CyanDocument61 pagesNokia E72 User Guide: Cyan CyanSyed Mohammad AfzalNo ratings yet
- ATM Thefts PresentationDocument17 pagesATM Thefts PresentationChithiran CullenNo ratings yet
- Final VersionDocument85 pagesFinal VersionHayat AhmedNo ratings yet
- Megagate Titan T610 Users Manual GuideDocument18 pagesMegagate Titan T610 Users Manual GuideZNNo ratings yet
- Samsung Galaxy S (GT-I9000) User Manual (Eclair Ver.) (Rev.1.2)Document132 pagesSamsung Galaxy S (GT-I9000) User Manual (Eclair Ver.) (Rev.1.2)mixer5056100% (2)
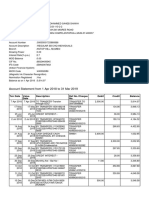
- Account Statement From 1 Apr 2018 To 31 Mar 2019: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument2 pagesAccount Statement From 1 Apr 2018 To 31 Mar 2019: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceJabbar ShaikhNo ratings yet