Introduction
Introduction
Download as pdf or txt
You might also like
- 5 0 Applications First - Order - OdesDocument16 pages5 0 Applications First - Order - OdesDelos Santos, Jayson C.No ratings yet
- NA FinalExam Summer15 PDFDocument8 pagesNA FinalExam Summer15 PDFAnonymous jITO0qQHNo ratings yet
- Numerical Method Lecture Note Quick PDFDocument21 pagesNumerical Method Lecture Note Quick PDFsharunnizamNo ratings yet
- Chapter 1 (5 Lectures)Document15 pagesChapter 1 (5 Lectures)PriyanshuNo ratings yet
- Second Labaratory Report MR - ParkDocument6 pagesSecond Labaratory Report MR - ParkabduazizxojaabdulazizogliNo ratings yet
- Nummeth Lect 00Document15 pagesNummeth Lect 00Anna TabuashviliNo ratings yet
- HW2 MTH452/552Document7 pagesHW2 MTH452/552Jhovanny AlexanderNo ratings yet
- tallerEDO MN2018 IDocument5 pagestallerEDO MN2018 IAlgebra LinealNo ratings yet
- LeastDocument2 pagesLeastBalakumar BkNo ratings yet
- Year 1 MT Vacation Work, Vectors and MatricesDocument5 pagesYear 1 MT Vacation Work, Vectors and MatricesRoy VeseyNo ratings yet
- 1-1 Numerical Methods InttroductionDocument20 pages1-1 Numerical Methods InttroductionwasifNo ratings yet
- Inverse Problems An Introduction - kirchgraber-Kirsch-Sto ErDocument27 pagesInverse Problems An Introduction - kirchgraber-Kirsch-Sto ErCortney MossNo ratings yet
- Lecture Notes17Document122 pagesLecture Notes17Dr Simran KaurNo ratings yet
- Convex Optimization and System Theory: Kees Roos/A.A. Stoorvogel E-Mail: UrlDocument39 pagesConvex Optimization and System Theory: Kees Roos/A.A. Stoorvogel E-Mail: UrlAnonymous N3LpAXNo ratings yet
- Chapter 10 Numerical Solution MethodsDocument56 pagesChapter 10 Numerical Solution MethodsmuhammadNo ratings yet
- MA261Notes Part1Document33 pagesMA261Notes Part1lasnieyanNo ratings yet
- Sol FM1115FinalExam2015Document13 pagesSol FM1115FinalExam2015Colly LauNo ratings yet
- 5b Curve Fitting InterpolationDocument71 pages5b Curve Fitting Interpolationbnzjane52No ratings yet
- Emth271 12 ExamDocument34 pagesEmth271 12 Exam周泰No ratings yet
- RootsDocument29 pagesRootssadiksnmNo ratings yet
- Lecture Notes 01-Introduction and Error Analysis (Print Version)Document37 pagesLecture Notes 01-Introduction and Error Analysis (Print Version)Juan Sebastian Yela VNo ratings yet
- Slides EstimationDocument171 pagesSlides Estimationcoxdevon045No ratings yet
- Introduction To Numerical MethodesDocument11 pagesIntroduction To Numerical MethodesMiljan TrivicNo ratings yet
- Csci567 Hw1 Spring 2016Document9 pagesCsci567 Hw1 Spring 2016mhasanjafryNo ratings yet
- Num Math PDFDocument87 pagesNum Math PDFsahibjotNo ratings yet
- Maths All NotesDocument122 pagesMaths All NotesVinay DograNo ratings yet
- Lec 30Document9 pagesLec 30raw.junkNo ratings yet
- Chapter 1: Introduction and Mathematical Preliminaries: Evy Kersal eDocument49 pagesChapter 1: Introduction and Mathematical Preliminaries: Evy Kersal eNehal KhanNo ratings yet
- 0603147Document7 pages0603147Akshat NegiNo ratings yet
- HW 1Document3 pagesHW 1Prakhar SrivastavaNo ratings yet
- Numerical Programming I (For CSE) : Final ExamDocument8 pagesNumerical Programming I (For CSE) : Final ExamhisuinNo ratings yet
- InterpolationDocument11 pagesInterpolationdaniyadevaccNo ratings yet
- CmdieDocument8 pagesCmdieBeny AbdouNo ratings yet
- Assignment 0 SolDocument2 pagesAssignment 0 SolMomentum VdoNo ratings yet
- Chapter 1 Intro PDFDocument35 pagesChapter 1 Intro PDFAriffuddin SaadNo ratings yet
- Nahw2 2024Document5 pagesNahw2 2024petcovnicolaNo ratings yet
- Otes On Ifferential QuationsDocument100 pagesOtes On Ifferential QuationsVasu KodagantiNo ratings yet
- CalcII Probability SolutionsDocument5 pagesCalcII Probability SolutionsD Princess ShailashreeNo ratings yet
- Final Exam: 1. Lots of Ones (20 Points)Document4 pagesFinal Exam: 1. Lots of Ones (20 Points)FidaHussainNo ratings yet
- Project 1Document11 pagesProject 1Ahmed AbdelhalimNo ratings yet
- Det Eval ManDocument4 pagesDet Eval ManNaveen Kumar SinghNo ratings yet
- Various Developments in Control: Department of MathematicsDocument27 pagesVarious Developments in Control: Department of MathematicsflausenNo ratings yet
- CS323: Lecture #1: Types of ErrorsDocument4 pagesCS323: Lecture #1: Types of ErrorsMuhammad chaudharyNo ratings yet
- Data Smoothing Functions in MathcadDocument13 pagesData Smoothing Functions in Mathcaddan-gabiNo ratings yet
- Assignment 2Document4 pagesAssignment 210121011No ratings yet
- Calculus Non-Routine Problems and SolutionsDocument51 pagesCalculus Non-Routine Problems and Solutionskaushik247No ratings yet
- 10 1134@S0005117915090052Document16 pages10 1134@S0005117915090052Riccardo FerreroNo ratings yet
- Differentiation MITDocument134 pagesDifferentiation MITRahul AgrawalNo ratings yet
- Chapter 05 - Least SquaresDocument27 pagesChapter 05 - Least SquaresMuhammad IsmailNo ratings yet
- MATH219 Lecture 6Document9 pagesMATH219 Lecture 6Serdar BilgeNo ratings yet
- Analysis of Algorithms: C RecurrencesDocument5 pagesAnalysis of Algorithms: C RecurrencesFathimaNo ratings yet
- Midterm 2016 CorrDocument4 pagesMidterm 2016 Corrantoine demeireNo ratings yet
- ρA ´u x, t ∂ p x,t ∂ x b x, tDocument8 pagesρA ´u x, t ∂ p x,t ∂ x b x, tAlicia HambureNo ratings yet
- π on a computer!), but a piece of paper orDocument79 pagesπ on a computer!), but a piece of paper orNg Chun HiuNo ratings yet
- An Introduction To Numerical Partial Differential Equations: HUN AO ENGDocument80 pagesAn Introduction To Numerical Partial Differential Equations: HUN AO ENGprashant_salima6377No ratings yet
- Num MathDocument87 pagesNum MathshubhamNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Student's Solutions Manual and Supplementary Materials for Econometric Analysis of Cross Section and Panel Data, second editionFrom EverandStudent's Solutions Manual and Supplementary Materials for Econometric Analysis of Cross Section and Panel Data, second editionNo ratings yet
- Simpsons 1/3 & 3/8 Rule. Cabajes ReportDocument7 pagesSimpsons 1/3 & 3/8 Rule. Cabajes ReportRbcabajes ButalonNo ratings yet
- Moment of Inertia Solved ProblemsDocument15 pagesMoment of Inertia Solved ProblemsSmit MhatreNo ratings yet
- L015 Trapezoidal Rule and Simpson's RuleDocument3 pagesL015 Trapezoidal Rule and Simpson's RuleJulián KaiharaNo ratings yet
- Group Project Report MathDocument23 pagesGroup Project Report MathjajaNo ratings yet
- Integration Maths 1Document20 pagesIntegration Maths 1Moreblessing AudreyNo ratings yet
- Unit 4 Numerical Techniques Unit: 4: Btech4 SemDocument106 pagesUnit 4 Numerical Techniques Unit: 4: Btech4 SemRuag ShradaNo ratings yet
- Topic 2: Area and Volume: Dcc3093: Engineering Survey 2Document8 pagesTopic 2: Area and Volume: Dcc3093: Engineering Survey 2Jagatheswary JagatheswaryNo ratings yet
- Chapter1: Numerical Differentiation: 1.1 Finite Difference Approximation of The DerivativeDocument51 pagesChapter1: Numerical Differentiation: 1.1 Finite Difference Approximation of The DerivativeHassan allaNo ratings yet
- Workshop 8: Numerical Differentiation and IntegrationDocument9 pagesWorkshop 8: Numerical Differentiation and IntegrationLevi GrantzNo ratings yet
- Numerical Methods: Jeffrey R. ChasnovDocument60 pagesNumerical Methods: Jeffrey R. Chasnov2120 sanika GaikwadNo ratings yet
- S.No. 15632 TA: 16 SCCMM 9Document4 pagesS.No. 15632 TA: 16 SCCMM 9VarunNo ratings yet
- HW7 SolDocument6 pagesHW7 Solmetmet476No ratings yet
- Unit 4_ONT (2)Document109 pagesUnit 4_ONT (2)Himanshu PandeyNo ratings yet
- Numerical Differentiation and IntegrationDocument17 pagesNumerical Differentiation and IntegrationArindam SenNo ratings yet
- Numerical Computing Assignment - Saad (20821)Document3 pagesNumerical Computing Assignment - Saad (20821)Syed Saad ManzoorNo ratings yet
- Area Under GZ Curve - Boat Design ForumsDocument6 pagesArea Under GZ Curve - Boat Design ForumsMuhammad Anis BasiranNo ratings yet
- Advanced Excel Skills For Chemical Engineers Working in The Industry - KMUTTNB - 03oct2024 - FinalDocument94 pagesAdvanced Excel Skills For Chemical Engineers Working in The Industry - KMUTTNB - 03oct2024 - Finalbiathaisong01No ratings yet
- Mathematics: Analog IasDocument13 pagesMathematics: Analog IasAjay PalriNo ratings yet
- IGNOU Old Question PaperDocument8 pagesIGNOU Old Question PaperMohd PkNo ratings yet
- Math 135A Laurent Ucr 2010 Fall Numerical AnalysisDocument43 pagesMath 135A Laurent Ucr 2010 Fall Numerical Analysismath135a_ucrNo ratings yet
- Numerical Analysis I-1Document205 pagesNumerical Analysis I-1Abinet Alemu100% (1)
- Numerical Differentiation and IntegrationDocument38 pagesNumerical Differentiation and IntegrationZeynadin ABNo ratings yet
- Numerical Integration and DifferentiationDocument41 pagesNumerical Integration and DifferentiationDocTor DOOMNo ratings yet
- CS321 Numerical AnalysisDocument53 pagesCS321 Numerical AnalysisJoy loboNo ratings yet
- mth603 QuizDocument12 pagesmth603 QuizMuhammad Ali Akbar50% (2)
- Deriving Simpsons Rule Using Newton InterpolationDocument4 pagesDeriving Simpsons Rule Using Newton InterpolationVinjkNo ratings yet
- More Challenging Problems On Numerical AnalysisDocument14 pagesMore Challenging Problems On Numerical AnalysisTin Lam TohNo ratings yet
- Mzumbe University Falculty of Science and Technology MSS 224:numerical Analysis Tutorial Sheet 4Document2 pagesMzumbe University Falculty of Science and Technology MSS 224:numerical Analysis Tutorial Sheet 4Melchizedek MashamboNo ratings yet
- Numerical Integration PDFDocument56 pagesNumerical Integration PDFNi Mesh100% (2)
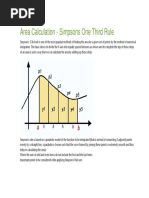
- Area Calculation - Simpsons One Third RuleDocument3 pagesArea Calculation - Simpsons One Third RulePRAMIT KUMAR SAMANTANo ratings yet