0% found this document useful (0 votes)
6 viewsM2 Process Control
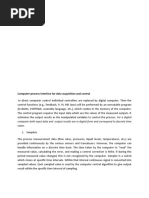
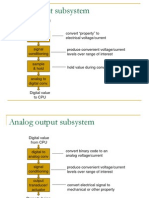
Digital signal conditioning involves converting analog process data into digital format so it can be processed by digital controllers like computers. This is necessary because measurement systems produce analog data while controllers are now digital. Accuracy is lost during analog to digital conversion. Digital signal conditioning allows analog devices like sensors and actuators to interface with digital controllers.
Uploaded by
Raghad AlnajimCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
6 viewsM2 Process Control
Digital signal conditioning involves converting analog process data into digital format so it can be processed by digital controllers like computers. This is necessary because measurement systems produce analog data while controllers are now digital. Accuracy is lost during analog to digital conversion. Digital signal conditioning allows analog devices like sensors and actuators to interface with digital controllers.
Uploaded by
Raghad AlnajimCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 11