Full-Bridge DMOS PWM Motor Driver: Description Features and Benefits
Full-Bridge DMOS PWM Motor Driver: Description Features and Benefits
Download as pdf or txt
You might also like
- Iec 61340-4-1-2015Document54 pagesIec 61340-4-1-2015srdjan.djordjevic0603No ratings yet
- Induction Cooker TeardownDocument14 pagesInduction Cooker TeardownNguyễn Hồng DươngNo ratings yet
- Manual Panel H-100 IODocument8 pagesManual Panel H-100 IOroberto sanchez0% (1)
- A4950 DatasheetDocument9 pagesA4950 DatasheetIndra KurniawanNo ratings yet
- Full-Bridge DMOS PWM Motor Drivers: A4952 and A4953Document11 pagesFull-Bridge DMOS PWM Motor Drivers: A4952 and A4953jonathan.boussoir2215No ratings yet
- Bd7776rfs Controlador Driver Motor DVD LGDocument4 pagesBd7776rfs Controlador Driver Motor DVD LGRoberto GonzalesNo ratings yet
- Str-x6759n Ds enDocument9 pagesStr-x6759n Ds enCleiton SilvaNo ratings yet
- And Automotive 3-Phase BLDC Controller and MOSFET Driver: Description Features and BenefitsDocument21 pagesAnd Automotive 3-Phase BLDC Controller and MOSFET Driver: Description Features and BenefitsCanerNo ratings yet
- APX9131A: Features General DescriptionDocument12 pagesAPX9131A: Features General DescriptionChek OmarovNo ratings yet
- OB2362 DatasheetDocument10 pagesOB2362 DatasheetTín SmpsNo ratings yet
- BUK109-50DL PhilipsSemiconductorsDocument10 pagesBUK109-50DL PhilipsSemiconductorsleventdemir250No ratings yet
- Driver de Motor Paso A PasoDocument4 pagesDriver de Motor Paso A PasoRoberto GonzalesNo ratings yet
- str-x6768n Ds en PDFDocument9 pagesstr-x6768n Ds en PDFCarlNo ratings yet
- C90691 - LM2596R 12 - 2016 12 17Document8 pagesC90691 - LM2596R 12 - 2016 12 17Nabla HarryNo ratings yet
- Logic Level TOPFET BUK130-50DL SMD Version of BUK119-50DL: Description Quick Reference DataDocument6 pagesLogic Level TOPFET BUK130-50DL SMD Version of BUK119-50DL: Description Quick Reference DataNathan IbrahimNo ratings yet
- A4954 Datasheet PDFDocument9 pagesA4954 Datasheet PDFJason WuNo ratings yet
- R1210N301ADocument17 pagesR1210N301AThanh LeNo ratings yet
- Low Input Current Photodarlington Coupler: Features DescriptionDocument15 pagesLow Input Current Photodarlington Coupler: Features DescriptionStuxnetNo ratings yet
- Sensorless BLDC Controller A4960: Description Features and BenefitsDocument34 pagesSensorless BLDC Controller A4960: Description Features and BenefitsadilNo ratings yet
- SY8113Document4 pagesSY8113JMSNo ratings yet
- A3941 DatasheetDocument21 pagesA3941 DatasheetayoubmacNo ratings yet
- Ir2301 (S) & (PBF) : High and Low Side DriverDocument18 pagesIr2301 (S) & (PBF) : High and Low Side DriverDr Zeljko DespotovicNo ratings yet
- Ir2175 (S) & (PBF) : Linear Current Sensing IcDocument7 pagesIr2175 (S) & (PBF) : Linear Current Sensing IcDavid CoronadoNo ratings yet
- A3953SBDocument15 pagesA3953SBMa ZoNo ratings yet
- Off-Line Quasi-Resonant Switching Regulators: STR-X6729Document11 pagesOff-Line Quasi-Resonant Switching Regulators: STR-X6729Ossian Valera PinedaNo ratings yet
- UC3842TDocument15 pagesUC3842TmedyaaktuelNo ratings yet
- OB2338Document9 pagesOB2338Raul LopezNo ratings yet
- OB2530P On BrightElectronicsDocument10 pagesOB2530P On BrightElectronicsrrNo ratings yet
- General Description Features: High Performance Current Mode PWM ControllerDocument11 pagesGeneral Description Features: High Performance Current Mode PWM ControllerPhạm Tấn HảiNo ratings yet
- BL05Document10 pagesBL05Hilmy AhmadNo ratings yet
- LM - 384 PDFDocument11 pagesLM - 384 PDFDaniel Arcia JiménezNo ratings yet
- LM384Document12 pagesLM384Luis TorresNo ratings yet
- Buk138 50DLDocument7 pagesBuk138 50DLAttila KissNo ratings yet
- OB2203 On-BrightElectronicsDocument13 pagesOB2203 On-BrightElectronicsعلي محمدعبدالله الردينيNo ratings yet
- UC2842B(3B(4B(5BDocument16 pagesUC2842B(3B(4B(5BRegion 51No ratings yet
- At2596 IatDocument13 pagesAt2596 Iatlaboratorio eletronicoNo ratings yet
- STA7130MPR/7131MPR/7132MPR: 2-Phase To 2W 1-2 Phase Excitation Support, Built-In SequencerDocument2 pagesSTA7130MPR/7131MPR/7132MPR: 2-Phase To 2W 1-2 Phase Excitation Support, Built-In SequencerDriss Ben MohamedNo ratings yet
- 36V/3A 500Khz Synchronous Step-Down Converter: FeaturesDocument10 pages36V/3A 500Khz Synchronous Step-Down Converter: FeaturesDmitrNo ratings yet
- Ob 2223 HCDocument11 pagesOb 2223 HCRivaldyNo ratings yet
- Ir2155 PDFDocument7 pagesIr2155 PDFagrajitNo ratings yet
- STR-X6729 DatasheetDocument24 pagesSTR-X6729 DatasheetJesus E Lopez BNo ratings yet
- UC3842B/3843B: Unisonic Technologies Co., LTDDocument11 pagesUC3842B/3843B: Unisonic Technologies Co., LTDvannadioNo ratings yet
- cr6853 Chip-RailDocument12 pagescr6853 Chip-RailJosé Edilson da PazNo ratings yet
- OB2201Document13 pagesOB2201Ahmad ShahNo ratings yet
- Silergy-Corp-SYH113ADC C479078Document5 pagesSilergy-Corp-SYH113ADC C479078Simo PatrickNo ratings yet
- Al8860 1019719Document18 pagesAl8860 1019719hansNo ratings yet
- LM3842A (1)Document6 pagesLM3842A (1)NaveenNo ratings yet
- UC3846Document10 pagesUC3846Polo Soldas Polo SoldasNo ratings yet
- Str-A6251M: Universal-Input/15 W 67 KHZ Flyback Switching RegulatorDocument7 pagesStr-A6251M: Universal-Input/15 W 67 KHZ Flyback Switching RegulatorAlexisNo ratings yet
- LM5030Document11 pagesLM5030servitec informaticaNo ratings yet
- ZS6312 V1.0Document12 pagesZS6312 V1.0Franzua PlasenciaNo ratings yet
- Iris 4015Document6 pagesIris 4015vetchboyNo ratings yet
- OB On Bright Elec OB2225MCP - C92008Document9 pagesOB On Bright Elec OB2225MCP - C92008shohanur.waltonbdNo ratings yet
- Sla7070mr, MPR, MPRT/7071MR, MPR, MPRT/7072MR, MPR, MPRT/7073MR, MPR, MPRTDocument2 pagesSla7070mr, MPR, MPRT/7071MR, MPR, MPRT/7072MR, MPR, MPRT/7073MR, MPR, MPRTDriss Ben MohamedNo ratings yet
- Pip3104 PDocument6 pagesPip3104 Pkakaw.ventas.2018No ratings yet
- SD6834 - Datasheet: Current Mode PWM+PFM Controller With Built-In High Voltage MosfetDocument10 pagesSD6834 - Datasheet: Current Mode PWM+PFM Controller With Built-In High Voltage Mosfetحسین مشعلNo ratings yet
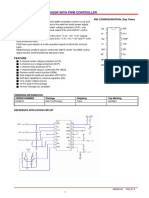
- Power Supply Supervisor With PWM Controller: Description Pin Configuration (Top View)Document6 pagesPower Supply Supervisor With PWM Controller: Description Pin Configuration (Top View)GigaflopsTechnology2019No ratings yet
- OB2273A On BrightDocument10 pagesOB2273A On BrightHamza Abbasi AbbasiNo ratings yet
- Utc3842 YouwangelectronicsDocument9 pagesUtc3842 YouwangelectronicsMindSet MarcosNo ratings yet
- KA5L0565R: Fairchild Power Switch (FPS)Document10 pagesKA5L0565R: Fairchild Power Switch (FPS)miloud1911No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- DCU 60 (3)Document8 pagesDCU 60 (3)Michael Adeiza EmmanuelNo ratings yet
- ON BUT SHOULD BE OFF SYSTEMSDocument3 pagesON BUT SHOULD BE OFF SYSTEMSMichael Adeiza EmmanuelNo ratings yet
- DCU 60 (4)Document4 pagesDCU 60 (4)Michael Adeiza EmmanuelNo ratings yet
- Unassigned meters AraromiDocument2 pagesUnassigned meters AraromiMichael Adeiza EmmanuelNo ratings yet
- Watch dog trackingDocument26 pagesWatch dog trackingMichael Adeiza EmmanuelNo ratings yet
- Approved 2023 2024 Academic Calendar 1Document4 pagesApproved 2023 2024 Academic Calendar 1Michael Adeiza EmmanuelNo ratings yet
- 2558 Eg8010Document20 pages2558 Eg8010Michael Adeiza EmmanuelNo ratings yet
- Sam-1500c-12 Owners GuideDocument32 pagesSam-1500c-12 Owners GuideMichael Adeiza EmmanuelNo ratings yet
- Any-Grid - PSW-H - Firmware Upgrade Guide - 2020-02-26Document7 pagesAny-Grid - PSW-H - Firmware Upgrade Guide - 2020-02-26Michael Adeiza EmmanuelNo ratings yet
- InverCharge ManualDocument46 pagesInverCharge ManualMichael Adeiza EmmanuelNo ratings yet
- 2N690 DatasheetDocument3 pages2N690 DatasheetMichael Adeiza EmmanuelNo ratings yet
- Sailor MF HFDocument4 pagesSailor MF HFArlindo J LopesNo ratings yet
- 179 90 02 GaugesDocument4 pages179 90 02 GaugesdieucmoiNo ratings yet
- Thurlby Thandar Instruments TTI QL Series II User ID4754Document42 pagesThurlby Thandar Instruments TTI QL Series II User ID4754luisNo ratings yet
- Oisd STD 234 PDFDocument32 pagesOisd STD 234 PDFdinesh meenaNo ratings yet
- Electrical Connectors and Tooling PDFDocument13 pagesElectrical Connectors and Tooling PDFWellington RamosNo ratings yet
- Aiwa Cx-Lem550 (Xr-Em550)Document48 pagesAiwa Cx-Lem550 (Xr-Em550)Ivan Vanko100% (1)
- As 2067Document8 pagesAs 2067Muhammad Mohsin0% (1)
- Analog ElectronicsDocument90 pagesAnalog ElectronicsBikashDeyNo ratings yet
- IPEMC 2012 Seminar 3ph PFC Rectifiers FINAL As Sent 310512Document178 pagesIPEMC 2012 Seminar 3ph PFC Rectifiers FINAL As Sent 310512Saidah BaisaNo ratings yet
- KX-T7730X-B: Proprietary TelephoneDocument37 pagesKX-T7730X-B: Proprietary TelephoneUriel Obregon BalbinNo ratings yet
- THD en Tcd220002ac 20230509 Manual WDocument3 pagesTHD en Tcd220002ac 20230509 Manual WVelmurugan VelmuruganNo ratings yet
- Booster 12 H-EDocument2 pagesBooster 12 H-EAleksandar PapNo ratings yet
- EC8651 TLWG - Unit 1 - Study MaterialDocument40 pagesEC8651 TLWG - Unit 1 - Study MaterialSundar 2151No ratings yet
- Silicon 2Document221 pagesSilicon 2cafierroNo ratings yet
- Voltage Current Protector GPS8Document2 pagesVoltage Current Protector GPS8HsbchehNo ratings yet
- ANSI TIA/EIA-422-B TIA/EIA-423-B ITU V.10 V.11 I 10ma 200mV 7V 60mV T 17ns 5V AM26C32Document35 pagesANSI TIA/EIA-422-B TIA/EIA-423-B ITU V.10 V.11 I 10ma 200mV 7V 60mV T 17ns 5V AM26C32wangchangjincnNo ratings yet
- GT'LED 3genDocument3 pagesGT'LED 3genDr. Ahmed IsmailNo ratings yet
- MC74HC161A MotorolaDocument12 pagesMC74HC161A MotorolaMed SamiNo ratings yet
- Cam Operated HammerDocument52 pagesCam Operated HammerSRL MECH100% (1)
- Fundamentals of Electrical EngineeringDocument38 pagesFundamentals of Electrical EngineeringnbaotuanNo ratings yet
- Vrla Agm Lead Acid Fiamm Batteries Fiamm Monolite Type: 2sla250 / 2sla300Document2 pagesVrla Agm Lead Acid Fiamm Batteries Fiamm Monolite Type: 2sla250 / 2sla300Muhamad YasrinNo ratings yet
- WL005 - WL10: Silicon Bridge Rectifiers WOBDocument3 pagesWL005 - WL10: Silicon Bridge Rectifiers WOBtarpinoNo ratings yet
- Lect 9 Super Heterodyne ReceiverDocument9 pagesLect 9 Super Heterodyne ReceiverUmer EhsanNo ratings yet
- ABS Rules For Cable SizingDocument2 pagesABS Rules For Cable SizingMohammed JassimNo ratings yet
- PWC Indonesia Eum Newsflash 2016 59Document4 pagesPWC Indonesia Eum Newsflash 2016 59AndreNo ratings yet
- Cisco Aironet Antennas and Accessories: Executive OverviewDocument40 pagesCisco Aironet Antennas and Accessories: Executive OverviewernestoNo ratings yet
- GE Built in Dishwashers Generation II Technicians Service ManualDocument14 pagesGE Built in Dishwashers Generation II Technicians Service ManualsublimemasterjwNo ratings yet