Unit-I: Introduction To Radar
Unit-I: Introduction To Radar
Download as pdf or txt
You might also like
- Radar BasicsDocument29 pagesRadar BasicsYohannis Masresha100% (1)
- Navedtra 14339Document54 pagesNavedtra 14339Blaze123xNo ratings yet
- Radio Propagation and Antennas: A Non-Mathematical Treatment of Radio and AntennasFrom EverandRadio Propagation and Antennas: A Non-Mathematical Treatment of Radio and AntennasRating: 5 out of 5 stars5/5 (1)
- Makita 110 V To 220 VDocument9 pagesMakita 110 V To 220 Vtrunghieu02ck1No ratings yet
- Chapter 1: Introduction: The Name Radar Stands For Radio Detection and RangingDocument37 pagesChapter 1: Introduction: The Name Radar Stands For Radio Detection and RangingrajeevNo ratings yet
- Project ProposalDocument19 pagesProject ProposalSougat Dhungel100% (2)
- RadarDocument17 pagesRadarAnindya Mukul100% (2)
- Surveillance Systems Course OutlineDocument36 pagesSurveillance Systems Course OutlinemogenoordiinNo ratings yet
- RS Unit-1pptDocument83 pagesRS Unit-1pptNamadi SwethaNo ratings yet
- Unit 1Document43 pagesUnit 1Tammaneni NavyaNo ratings yet
- 1.what Are The Desirable Pulse Characteristics and The Factors That Govern Them in A Radar System?Document10 pages1.what Are The Desirable Pulse Characteristics and The Factors That Govern Them in A Radar System?allinonemp3_comNo ratings yet
- 02 Chapter Radar Principle and ApplicationsDocument5 pages02 Chapter Radar Principle and ApplicationstusharmasurNo ratings yet
- Rna MaterialDocument147 pagesRna MaterialShivani SaxenaNo ratings yet
- Radar Systems - Unit1Document129 pagesRadar Systems - Unit1srinivasanaikNo ratings yet
- Surveying Mod5 Modern Surveying InstrumentsDocument81 pagesSurveying Mod5 Modern Surveying InstrumentsAkshay KayapakNo ratings yet
- 1.0 Radar Basics: Skolnik, M. I., Introduction To Radar Systems, Third Edition, 2001, Mcgraw-Hill, New York, N.YDocument12 pages1.0 Radar Basics: Skolnik, M. I., Introduction To Radar Systems, Third Edition, 2001, Mcgraw-Hill, New York, N.Yiremulku1046No ratings yet
- RadarDocument12 pagesRadarAhmed RashadNo ratings yet
- Radar Principles & SystemsDocument57 pagesRadar Principles & Systemssmskaushik1No ratings yet
- Wa0002 PDFDocument21 pagesWa0002 PDFDevendra VarmaNo ratings yet
- Radar NotesDocument33 pagesRadar Notesrica_esclada100% (1)
- Radar Theory For Area Approach Radar ControllersDocument43 pagesRadar Theory For Area Approach Radar Controllersvyashemant83No ratings yet
- Semester Project Presentation: Electronics Based DevicesDocument34 pagesSemester Project Presentation: Electronics Based DevicesNabil AbdullahNo ratings yet
- Article EMTDocument8 pagesArticle EMTFatima TahreemNo ratings yet
- Radar Unit 1Document60 pagesRadar Unit 1GAURAV RATHORENo ratings yet
- Radar Systems ModifiedDocument114 pagesRadar Systems ModifiedGayathri YaddalaNo ratings yet
- EamT 4Document7 pagesEamT 4Fatima TahreemNo ratings yet
- Radar & Sar Remote SensingDocument11 pagesRadar & Sar Remote SensingParag Jyoti DuttaNo ratings yet
- EE Unit-4Document15 pagesEE Unit-4Srishabh DeoNo ratings yet
- EE602 Radar Notes-1Document41 pagesEE602 Radar Notes-1Yash Nimje100% (2)
- Radar :radio Detection and Ranging Seminar ReportDocument18 pagesRadar :radio Detection and Ranging Seminar ReportRavindra Mathanker89% (9)
- Radar Systems Vr19 Unit1 1Document126 pagesRadar Systems Vr19 Unit1 1Mummana Mohan ShankarNo ratings yet
- Chapter 3 (Copy)Document35 pagesChapter 3 (Copy)xyzabcNo ratings yet
- Group 5&6 Radar Systems - NaviDocument9 pagesGroup 5&6 Radar Systems - NaviDaniel TamisenNo ratings yet
- Rs Notes Pdf1Document248 pagesRs Notes Pdf1himeshemraan100% (1)
- 1.0 Radar Basics: Skolnik, M. I., Introduction To Radar Systems, Third Edition, 2001, Mcgraw-Hill, New York, N.YDocument12 pages1.0 Radar Basics: Skolnik, M. I., Introduction To Radar Systems, Third Edition, 2001, Mcgraw-Hill, New York, N.YDivine Grace BurmalNo ratings yet
- Radar Systems-Jntu Lecture Notes-4-121 PDFDocument118 pagesRadar Systems-Jntu Lecture Notes-4-121 PDFSunny KilaruNo ratings yet
- Basics of RadarDocument44 pagesBasics of RadarAnusha PenchalaNo ratings yet
- Radar SystemsDocument91 pagesRadar SystemsVijaya SimhaNo ratings yet
- RadarDocument32 pagesRadarpmbrahvee115No ratings yet
- Microwave FMCW RadarDocument48 pagesMicrowave FMCW RadarPranabKumarGoswami100% (2)
- Radar Engineering Assignment KeyDocument24 pagesRadar Engineering Assignment KeySree VamsiNo ratings yet
- Radar: AVTE 326Document53 pagesRadar: AVTE 326Fitzpatrick Cunanan100% (1)
- Report File: Hf/Ndb-Bijawasan AsmgcsDocument18 pagesReport File: Hf/Ndb-Bijawasan AsmgcsArshilgeniNo ratings yet
- Frequency Modulation Continuous WaveDocument8 pagesFrequency Modulation Continuous Waveroi_sihombingNo ratings yet
- Radar Unit1Document10 pagesRadar Unit1Mummana Mohan ShankarNo ratings yet
- Introduction To RadarsDocument4 pagesIntroduction To RadarsSivaranjan GoswamiNo ratings yet
- LN - 10 - 50 - Radar MeteorologyDocument47 pagesLN - 10 - 50 - Radar MeteorologyPantulu MurtyNo ratings yet
- Radar Presentation 01Document30 pagesRadar Presentation 01cozdim100% (5)
- Topic 4 Radar FundamentalsDocument127 pagesTopic 4 Radar FundamentalsMuhammad Haziq afnan Bin Mohd SarNo ratings yet
- Radar: Basic Principle-Radar Is ADocument5 pagesRadar: Basic Principle-Radar Is AkdchourasiaNo ratings yet
- Radar and Sensor Systems Basic Principle of OperationDocument16 pagesRadar and Sensor Systems Basic Principle of OperationJeff Mirondo KibalyaNo ratings yet
- Introduction To Radar Scattering Application in ReDocument17 pagesIntroduction To Radar Scattering Application in ReGemmy94No ratings yet
- Ee455 Chapter6 Pulsed Radar 1668493538Document34 pagesEe455 Chapter6 Pulsed Radar 1668493538Enes AktaşNo ratings yet
- Radar Manual2019Document24 pagesRadar Manual2019UNCLE STATIONARYNo ratings yet
- What Is Radar and How Is It UsedDocument73 pagesWhat Is Radar and How Is It UsedAhmed ShahNo ratings yet
- Radar Transmitters and 2Document8 pagesRadar Transmitters and 2mas3565560No ratings yet
- Radar SystemsDocument156 pagesRadar SystemsVed RajNo ratings yet
- Rader SystemDocument17 pagesRader SystemZamparma ZuxeNo ratings yet
- RT-CH 1 - Introduction To RadarDocument9 pagesRT-CH 1 - Introduction To RadarHemant YadavNo ratings yet
- Radio Control for Model Ships, Boats and AircraftFrom EverandRadio Control for Model Ships, Boats and AircraftRating: 5 out of 5 stars5/5 (1)
- Simplorer Getting Started GuideDocument103 pagesSimplorer Getting Started Guidedigital2000No ratings yet
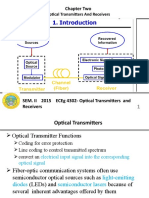
- Chapter Two: Optical Transmitters and ReceiversDocument58 pagesChapter Two: Optical Transmitters and ReceiversMekuanent AmareNo ratings yet
- Lab Report 04Document4 pagesLab Report 04Mehmood Khan Marwat100% (1)
- SMD CodebookDocument250 pagesSMD CodebookNikhil Praveen100% (2)
- Analog Communication by U.a.bakshi A.P. Godse PDFDocument3 pagesAnalog Communication by U.a.bakshi A.P. Godse PDFShifanilaNo ratings yet
- EE241 - Spring 2005: ISSCC 2005Document28 pagesEE241 - Spring 2005: ISSCC 2005milmalNo ratings yet
- CSC 134 AssignmentDocument13 pagesCSC 134 AssignmentNisa YusufNo ratings yet
- Digital Communication Two Marks Q&aDocument29 pagesDigital Communication Two Marks Q&ashankar70% (10)
- Schematic - Aap21 La-C921p Rev 1.0 A00Document78 pagesSchematic - Aap21 La-C921p Rev 1.0 A00dương hoàngNo ratings yet
- Training Msi MS-7 - IiDocument17 pagesTraining Msi MS-7 - IiadaofisicoNo ratings yet
- Panasonic - KX-TDE100 PBX Install Manual 3Document178 pagesPanasonic - KX-TDE100 PBX Install Manual 3satcomerNo ratings yet
- Hi X5200Document46 pagesHi X5200Michał ŻelichowskiNo ratings yet
- GCP Panel AsbuiltDocument44 pagesGCP Panel AsbuiltRizal BahteranNo ratings yet
- PLC To PID Modbus Examples PDFDocument6 pagesPLC To PID Modbus Examples PDFfmj conceptNo ratings yet
- William Stallings Computer Organization and Architecture 9 EditionDocument40 pagesWilliam Stallings Computer Organization and Architecture 9 EditionAdnan Aslam MerchantNo ratings yet
- Container Catalogue 2019-2020 V1.0 NEWDocument48 pagesContainer Catalogue 2019-2020 V1.0 NEWمعمر حميدNo ratings yet
- Cps 6000Document3 pagesCps 6000ckean_ngNo ratings yet
- Digital Logic Design: Abdulhadi ShoufanDocument12 pagesDigital Logic Design: Abdulhadi ShoufanMohammed ismail2010No ratings yet
- ORANGE PI-2022-What's Orange Pi PC PlusDocument5 pagesORANGE PI-2022-What's Orange Pi PC PlusPatronum ProjetoNo ratings yet
- Written Test and Performance TestDocument5 pagesWritten Test and Performance TestnoeNo ratings yet
- Wi-Fi Halow Signal Coverage Estimation in Collapsed StructuresDocument8 pagesWi-Fi Halow Signal Coverage Estimation in Collapsed StructuresFirmansyah KobongsatuNo ratings yet
- Cheklam Khaled CVDocument2 pagesCheklam Khaled CVCheklam Khaled100% (1)
- HARM - en ProgramDocument3 pagesHARM - en ProgramSergio ValentinNo ratings yet
- E CommerceDocument26 pagesE CommerceNehaBajajNo ratings yet
- Mtpad VXDocument8 pagesMtpad VXfabNo ratings yet
- Three Phase NetworksDocument12 pagesThree Phase NetworksA-Jay N. GalizaNo ratings yet
- KPC Master Catalog Parts v1!08!27 12Document2 pagesKPC Master Catalog Parts v1!08!27 12nachoNo ratings yet
- MATLAB - Transfer Functions - PrattWikiDocument4 pagesMATLAB - Transfer Functions - PrattWikiSaid EliasNo ratings yet
- IDC Characteristics: 110 Style 66 Style BIX Style LSA StyleDocument3 pagesIDC Characteristics: 110 Style 66 Style BIX Style LSA StyleOmer KhanNo ratings yet