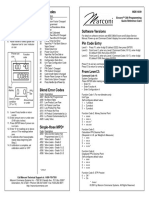
Single Axis Position Controller: SERIES P8511-000-R
Single Axis Position Controller: SERIES P8511-000-R
Download as pdf or txt
You might also like
- 9100 User ManualDocument48 pages9100 User Manualหน่อง นพดล83% (36)
- MDE-4039 Encore Programming QRDocument2 pagesMDE-4039 Encore Programming QRyenaid7No ratings yet
- Manual Uwe W10Document27 pagesManual Uwe W10michigato100% (1)
- Instruction Manual L&TDocument16 pagesInstruction Manual L&TVijay67% (3)
- gs3246 Parts ManualDocument222 pagesgs3246 Parts ManualGilvan JuniorNo ratings yet
- Words For Describing A House - NeighbourhoodDocument1 pageWords For Describing A House - NeighbourhoodMuhammad Mubin MaqbaNo ratings yet
- ELGODocument41 pagesELGOvatasaNo ratings yet
- P8822-000-R SERIES Dual Axes Position ControllerDocument29 pagesP8822-000-R SERIES Dual Axes Position ControllerAliali SmieoNo ratings yet
- PLC-K7 Series (K7M-DR60U)Document2 pagesPLC-K7 Series (K7M-DR60U)Suresh MNo ratings yet
- DS100S ManualDocument23 pagesDS100S ManualJuan Francisco Sanchez MassadiNo ratings yet
- PRiCO User Manual 03 04 2009Document16 pagesPRiCO User Manual 03 04 2009Mala BarnaNo ratings yet
- Variable Speed DriveDocument19 pagesVariable Speed Drivemonitoring dplNo ratings yet
- ToshibaS2E21ProductManual130719 1355935871Document12 pagesToshibaS2E21ProductManual130719 1355935871wher200202No ratings yet
- 09.1 PLC - Technical HandbookDocument30 pages09.1 PLC - Technical HandbookSandoval Ramos Eddy100% (1)
- XC-2001 Position Control Series (Single-Dual Electric ... - Linh MauDocument7 pagesXC-2001 Position Control Series (Single-Dual Electric ... - Linh MauSasha Naumchenko100% (3)
- Microprocessor-Based Digital Electronic Controller: Operating Instructions Tecnologic S.P.ADocument21 pagesMicroprocessor-Based Digital Electronic Controller: Operating Instructions Tecnologic S.P.AneilNo ratings yet
- Abb PSTX Fieldbus ProfibusDocument11 pagesAbb PSTX Fieldbus ProfibusFarouk MechtaNo ratings yet
- Guide Book - L7S Speed E V1.1Document21 pagesGuide Book - L7S Speed E V1.1huylong101No ratings yet
- Master K120 SDocument11 pagesMaster K120 SYudi MalangNo ratings yet
- Appendix. 505 Program Mode Worksheets: 505 Digital Governor Manual 85017V1Document3 pagesAppendix. 505 Program Mode Worksheets: 505 Digital Governor Manual 85017V1gonzalesNo ratings yet
- AS3 My Funcition User Manual E6582114 Rev 1Document61 pagesAS3 My Funcition User Manual E6582114 Rev 1Marco Antonio HerreraNo ratings yet
- WT Operation ManualDocument51 pagesWT Operation ManualpngchanhNo ratings yet
- AVR242: 8-Bit Microcontroller Multiplexing LED Drive and A 4 X 4 KeypadDocument26 pagesAVR242: 8-Bit Microcontroller Multiplexing LED Drive and A 4 X 4 KeypadDemeter Robert Es IzabellaNo ratings yet
- HMK7 Intelligentized Controller: Operating InstructionsDocument16 pagesHMK7 Intelligentized Controller: Operating InstructionsRayan Ibrahim100% (1)
- General Specifications: GS 05P03D21-01ENDocument9 pagesGeneral Specifications: GS 05P03D21-01ENHoang Vu HungNo ratings yet
- BTC 9090Document5 pagesBTC 9090VESANIASNo ratings yet
- Emcp IiDocument14 pagesEmcp IiAziz ArrahalNo ratings yet
- Emcp 2Document14 pagesEmcp 2ATHLETES GAMING100% (1)
- Master-K80S: - Compact Size and High Function TypeDocument3 pagesMaster-K80S: - Compact Size and High Function TypeMohammadNo ratings yet
- 1/16 DIN (48 48 MM) Temperature Controller: FeaturesDocument7 pages1/16 DIN (48 48 MM) Temperature Controller: FeaturesAditya Y. NovitasariNo ratings yet
- NICE2Document11 pagesNICE2tne tneNo ratings yet
- Maxthermo Pid ControllersDocument24 pagesMaxthermo Pid ControllersmoncieldonNo ratings yet
- 004A英文说明书Document20 pages004A英文说明书skyddNo ratings yet
- M4NS/M4YS: DIN W48×H24mm, W72×H36mm Loop Powered Digital Scaling MeterDocument4 pagesM4NS/M4YS: DIN W48×H24mm, W72×H36mm Loop Powered Digital Scaling MeterMaitry ShahNo ratings yet
- User Manual CAC ControllerDocument18 pagesUser Manual CAC ControllerJuanita Pardo Miranda100% (1)
- Manual 5438Document24 pagesManual 5438gemacuNo ratings yet
- P9521 000 e - 08 11 PDFDocument25 pagesP9521 000 e - 08 11 PDFJacob HarrisNo ratings yet
- Sony Ta Fe610r ManualDocument20 pagesSony Ta Fe610r ManualbogdanovicNo ratings yet
- Instruction Manual: Programmable Automatic Shift SystemDocument25 pagesInstruction Manual: Programmable Automatic Shift SystemmarcinNo ratings yet
- UG6165 Ibuttom para AutoclaveDocument45 pagesUG6165 Ibuttom para AutoclaveVer OnischNo ratings yet
- Vacon NXS NXP Mech Brake Control ASFIFF17 ApplicatDocument69 pagesVacon NXS NXP Mech Brake Control ASFIFF17 ApplicatTanuTiganuNo ratings yet
- AXE Microprocess RPM & Line-Speed Maths Controller Meter: FeaturesDocument5 pagesAXE Microprocess RPM & Line-Speed Maths Controller Meter: FeaturesofficeworksajidNo ratings yet
- Manual Atstorm Relay Remote ModuleDocument12 pagesManual Atstorm Relay Remote ModuleRAFAEL FREITAS FERREIRANo ratings yet
- CMT-007A - Digital CounterDocument4 pagesCMT-007A - Digital CounterSHARAB IMTIAZNo ratings yet
- Trumeter 9100Document36 pagesTrumeter 9100mehdisayadi2053No ratings yet
- C628 AWESOME Rate Meter: Dynapar Veeder-RootDocument1 pageC628 AWESOME Rate Meter: Dynapar Veeder-RootnayhatNo ratings yet
- Infineon IR35201MTRPBF DS v01 - 00 ENDocument60 pagesInfineon IR35201MTRPBF DS v01 - 00 ENicloudforkontoNo ratings yet
- ACS800 Drive ReductionDocument6 pagesACS800 Drive ReductionRabei EisaNo ratings yet
- Schneider XBTZG9775 PLC Control Cable To Mitsubishi FX Series MINI DIN 8-PIN RS232 MALE To RS232 DB9 FEMALE Black Length 1.8MDocument15 pagesSchneider XBTZG9775 PLC Control Cable To Mitsubishi FX Series MINI DIN 8-PIN RS232 MALE To RS232 DB9 FEMALE Black Length 1.8MSyed Hassan TariqNo ratings yet
- Sharp Er-A220v SMDocument51 pagesSharp Er-A220v SMabdoul nasse koneNo ratings yet
- ZAU-2200285-MAN-VVVF - Danfoss Vacon NXP Manuale_Cavotec_eng_v324Document64 pagesZAU-2200285-MAN-VVVF - Danfoss Vacon NXP Manuale_Cavotec_eng_v324muhammad.sadiqNo ratings yet
- Electro Static Precipitator ControlerDocument93 pagesElectro Static Precipitator Controlersen_subhasis_58100% (1)
- HY-TB3DV-N 3 Axis Driver Board ManualDocument10 pagesHY-TB3DV-N 3 Axis Driver Board Manualafricano333No ratings yet
- 02 PIDcontroller PDFDocument5 pages02 PIDcontroller PDFZugravu AndreiNo ratings yet
- Altec: Instruction ManualDocument33 pagesAltec: Instruction Manualfrankie35No ratings yet
- KT 470Document4 pagesKT 470Fabian PzvNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- WPC Door FrameDocument9 pagesWPC Door FrameParchuri PraveenNo ratings yet
- In NT AMF 1.2 Fast User GuideDocument2 pagesIn NT AMF 1.2 Fast User GuidesdiamanNo ratings yet
- Science - Sound DiffractionDocument12 pagesScience - Sound DiffractionElissah S PabilonaNo ratings yet
- Abap Code BookDocument66 pagesAbap Code BookDineshkumar AkulaNo ratings yet
- Seil Seres Service StationDocument2 pagesSeil Seres Service StationHo Yi ChuenNo ratings yet
- Project Quality Management: After Sale Quality DeptDocument54 pagesProject Quality Management: After Sale Quality DeptMuhammad KashifNo ratings yet
- RFP EagleBurgmann Rev.01 PDFDocument6 pagesRFP EagleBurgmann Rev.01 PDFAnzeljaegNo ratings yet
- A 59 ConductorsDocument2 pagesA 59 ConductorsPRAGATHI REDDYNo ratings yet
- IDC SOP # 13 POOH With DP, DC's and BitDocument4 pagesIDC SOP # 13 POOH With DP, DC's and BitkareemNo ratings yet
- Instrument GEDocument42 pagesInstrument GEnabil160874100% (2)
- VHDL NotesDocument40 pagesVHDL Notesangel_hunNo ratings yet
- 04 Calibration Manual For Instruments of BalClor BWMS-REV1.0Document22 pages04 Calibration Manual For Instruments of BalClor BWMS-REV1.0Fanis RafaelNo ratings yet
- UT501B English ManualDocument2 pagesUT501B English ManualIniciar IniciarNo ratings yet
- Osmo Pocket User Manual v1.0Document15 pagesOsmo Pocket User Manual v1.0Daniela TobaNo ratings yet
- Tensile Strength and Young's Modulus For High-Modulus Single-Filament MaterialsDocument5 pagesTensile Strength and Young's Modulus For High-Modulus Single-Filament MaterialsJean VillanuevaNo ratings yet
- New Microsoft Word DocumentDocument489 pagesNew Microsoft Word Documentnehab_68No ratings yet
- TM1703emic e PDFDocument11 pagesTM1703emic e PDFicad_090% (1)
- Discharge Flange Connection: Outline and Final AssemblyDocument2 pagesDischarge Flange Connection: Outline and Final AssemblyZankar R ParikhNo ratings yet
- "VEGA": Pulse Induction Metal Detector User's GuideDocument9 pages"VEGA": Pulse Induction Metal Detector User's GuideSoha AliNo ratings yet
- MILENA - Resumé 2024Document2 pagesMILENA - Resumé 2024milenaseveroNo ratings yet
- Annex 2019 Guidelines Marpol 6 Sulphur GuideDocument20 pagesAnnex 2019 Guidelines Marpol 6 Sulphur GuideZeki OzdenNo ratings yet
- BSNL Civil Wing Org Study Synopsis1Document3 pagesBSNL Civil Wing Org Study Synopsis1jayavasu89594No ratings yet
- D35 38NX (M) Quanchai CR498 - (Sb1806e00)Document721 pagesD35 38NX (M) Quanchai CR498 - (Sb1806e00)Abou BakrNo ratings yet
- Catalog of Products - Terex 2014Document332 pagesCatalog of Products - Terex 2014FabiánArcosNo ratings yet
- NB 2023 12 10 16Document32 pagesNB 2023 12 10 16elsypeter70No ratings yet
- Tigi A3 Brochure Hc1-A 2017Document4 pagesTigi A3 Brochure Hc1-A 2017GonzaloDiazInostrozaNo ratings yet
- Problem 2. Production of Bean Oil. Solution:: Steady State Process Simulation Using HYSYS Tutorial 1 Process SimulationDocument9 pagesProblem 2. Production of Bean Oil. Solution:: Steady State Process Simulation Using HYSYS Tutorial 1 Process SimulationEhsan AhzNo ratings yet
- Acf-172-1790 Mec-EgDocument33 pagesAcf-172-1790 Mec-EgThiago LuebkeNo ratings yet