
Encoder
Uploaded by
prodn123Encoder
Uploaded by
prodn123ELECTROMECHANICAL SOLUTIONS
AE09 ABSOLUTE OPTICAL ENCODER
SINGLE TURN
PRESENTATION
Optical The AE09 absolute encoder includes EXXELIA GROUP state-of-the-
Technology art and proprietary optical technology.
With their very compact design, high reliability and high
precision, EXXELIA GROUP miniature encoders meet the
requirements of the most demanding applications (Aerospace,
Military, Industrial, Medical industry, Oil & mining industry...).
Various output protocols are available in order to match your
application.
High temperature Shocks/Vibrations SSI / FSSI Low profile High
up to +115°C resist interface performances
GENERAL DATA ENVIRONMENTAL DATA
Resolution Up to 19 bits Operating temperature Up to –55°C to +115°C
Accuracy ± 1’ max. Storage temperature –55°C to +125°C
Maximum rotation speed 300 rpm Sealing IP 40
Starting torque ≤ 0.2 N.cm Vibrations 20 g, 1.5 mm, 10 Hz to 2 kHz
Weight (without cable) 35 g max. Shocks 50 g, ½ sine, 11 ms
For other specifications, please contact us
DIMENSIONS (in mm)
Flange mounting (F) Servo mounting (S)
2 x Ø 2.2 Ø5
18 ± 0,5 18 ± 0,5
Ls ±0.5 Ø 22 ± 0,2 Ø 27 Ls ±0.5
Ø 19,9 MAX
Ø 19,05 h7 (- 0,021)
+0
Ø 3,175 h7 (- 0,012)
+0
Ø 3,175 h7 (- 0,012)
+0
Cable:
Shielded / Jacketed
6x AWG32 wires
Length : Lw 2,5
3x1,6 ± 0,1
°
1.6 ±0.1
3 Optional flanges 60
www.exxelia.com • info@exxelia.com 10 Tel : + 33 (0)1 49 23 10 00 Page revised - Version 05/16
ELECTROMECHANICAL SOLUTIONS
SINGLE TURN
ABSOLUTE OPTICAL ENCODER AE09
STANDARD ELECTRICAL DATA
Power supply +5 VDC ± 5%
CONTACTLESS POSITION SENSORS
Maximum consumed current 130 mA
Output signals RS422/485
Maximum operating frequency 2 MHz (SSI) / 4 MHz (FSSI)
For other specifications, please contact us
ELECTRICAL INTERFACE
RS422/485 Interface Wiring diagram
User Encoder Red
VCC
Black
Encoder output
GND
150 Ω
Clock
Yellow
CLK
White
CLK
Blue
DATA
150 Ω
Data Green
DATA
HOW TO ORDER
Mounting Resolution Protocol 1 Temperature Mechanical Wire length Shaft length RoHS
range coupling (Lw) (Ls) compliance
AE09 • •• •• •• •• ••• ••• •
F 13 S1 ST 01 250 125 W
S 19 FS MT 02 TBD TBD N
HT XX
ST: Standard temp. 01:
250: 125:
–40°C to +85°C Without coupling W:
13 to 16 bits S1: SSI 250 mm 12.5 mm
RoHS compliant
F: Flange Standard Standard Standard
MT: Medium temp. 02:
FS: FSSI
–45°C to +105°C Standard coupling 1 N:
S: Servo 17 to 19 bits Standard TBD: TBD:
Non compliant
Specific SSI2 compatible To Be Defined To Be Defined
HT: High Temp. XX:
by the customer by the customer
–55°C to +115°C Custom coupling 2
1: Please refer to «Encoder Handbook» available on EXXELIA GROUP website.
2: For further information, please contact us.
www.exxelia.com • info@exxelia.com 11 Tel : + 33 (0)1 49 23 10 00 Page revised - Version 05/16
ELECTROMECHANICAL SOLUTIONS
GENERAL TECHNICAL DATA
Contactless Position Sensors general information
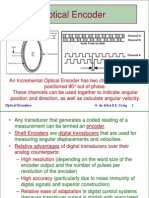
1. INTRODUCING EXXELIA GROUP ENCODERS conveys or alternatively blocks the light emitted by the source;
the scale or the disk is acts in fact as a beam switch. The photo-
Encoders are sensors that generate digital signals in response
receiver generates an electrical signal, which is processed and
to movement. Encoders come with two outlines: rotary and
analyzed in order to allow encoding the system position.
linear. Both types sense mechanical motion and translate the
information (velocity, position, acceleration) into useful data. An optical encoder consists of three major subsets:
A contactless technology • Encoder housing.
To address demands for longer service life and with its • Optical block: consisting of an emission system, an
strong track record in contact technology position sensors optical coding system and a detection system. It
(potentiometers), Electromechanical Solutions SBU has been generates the position function signal.
developing own-brand contactless sensors for nearly 10 years. • Electronics block: it allows amplifying, converting and
These sensors are absolute and incremental optical encoders, processing the signal.
magnetic technology and inductive sensors.
Absolute optical or magnetic encoders: absolute optical
encoders are position sensors that use optical signals to Photo-emitter
identify an absolute angular position. The EXXELIA GROUP Optical disk
encoders offer very high performance levels for a very small
footprint:
• high precision (<30 arcsec),
• high resolution (up to 21 bits),
• highly thin (10mm),
• EMI EMC compatibility
Incremental optical or magnetic encoders: absolute optical
encoders are position sensors that use optical signals to Reticles
identify an absolute angular position. Incremental encoders Photo-receivers
have to be initialized by a first turn to produce an absolute Figure 1: Incremental principle
position.
Applications: Aeronautics, Defense, Railway, Medical, Oil
exploration, Telecommunications
EXXELIA GROUP encoders can also be easily combined with other
functions like Slip rings or rotary joints (FORJ, HF...) in complete Photo-receivers
proprietary systems.
2. SENSING TECHNOLOGY Reticles
Encoders can use either optical or magnetic sensing
technology.
Optical sensing provides high resolutions, high operating
speeds, and reliability, long life operation in most environments. Coding disk
Magnetic sensing, often used in rugged applications provides
good resolution, high operating speeds, and maximum
resistance to dust, moisture, and thermal and mechanical
shock.
Optical Encoders: principles
Photo-emitters
Optical encoders’ principle of operation is relatively simple; a
Figure 2: Absolute principle
light source (photo-emitter) sends light through a mobile disk
or scale, consisting of a succession of opaque and transparent
parts, on photo-receivers. When the disk or the scale moves, it
www.exxelia.com • info@exxelia.com 7 Tel : + 33 (0)1 49 23 10 00 Page revised - Version 05/16
ELECTROMECHANICAL SOLUTIONS
Contactless Position Sensors general information
Optical encoders use a glass disk with a pattern of lines industrial environments, as well to shock and vibrations.
deposited on it, a metal or plastic disk with slots (in a rotary
encoder), or a glass or metal strip (in a linear encoder). Light
from a LED shines through the disk or strip onto one or more
photodetectors, which produce the encoder’s output.
Photo-emitters
Linear coding scale
Fig. 4a Fig. 4b
Figure 4: Magnetic Sensor principles:
a) On axis technology with a bipolar magnet
Reticles b) odd axis technology with a multipolar ring
4. ABSOLUTE OR INCREMENTAL CODING?
INCREMENTAL CODING
Incremental encoders provide a specific number of equally
Photo-receivers
spaced pulses per revolution (PPR) or per inch or millimeter of
Figure 3: Linear principle
linear motion.
3. MAGNETIC ENCODERS: PRINCIPLES
A
The position sensors which use the detection of a magnetic
field generally work following the same principle:
B
A magnetic field is generated thanks to a permanent magnet or
an electromagnet. The distribution in the space of this magnetic
Figure 5: A and B quadrature signals
field is not homogeneous. Depending on the relative positions
of the magnetic source, the sensors cells and a possible For applications that do not require detection sensing, a single
ferromagnetic third element, the magnitude of the field will be channel output is used. But in most cases, two channels A
different. The measured value is then analysed as a function and B, 90 electrical degrees out of phase are used. Those two
of the specific geometry in order to recover the information of channels allow a detection of the direction of motion (See
position. Figure 6). This is useful for processes that can reverse, or must
Among magnetic encoders we can distinguish several maintain steady position when standing still or mechanically
technologies which are using this principle to convert magnetic oscillating.
field into a physical quantity useful in electronic devices CW CCW
(typically current or tension). The most common are inductive
encoder, magneto-resistive encoder and Hall effect encoder. A A
Magnetic encoders are typically robust and non-sensitive to
environmental stress like shocks, vibrations, and chemical B B
substances. In order to protect the measurement against a
Figure 6: Determination of the direction of movement
variation of the external magnetic field (especially next to
motors), it is possible to add a magnetic shielding with specific The quantity of positions that can be detected depends on
materials and to carry out differential measurements. electronic processing from channels A and B (see Figure 7). In
the case the disk has N periods or “bars”:
Magnetic encoders constitute miniature long-life cost-effective
sensors. Magnetic sensing technology is very resistant to If processing system only detects leading (or trailing) edges of
dust, grease, moisture, and other contaminants common in channel A (or B), then the resolution is equal to the number N.
www.exxelia.com • info@exxelia.com 8 Tel : + 33 (0)1 49 23 10 00 Page revised - Version 05/16
ELECTROMECHANICAL SOLUTIONS
GENERAL TECHNICAL DATA
Contactless Position Sensors general information
If the system detects leading and trailing edges of channel A “zeroing” (seekers, flight commands, radar mechanics...).
(or B), or if it detects leading or trailing edges of channels A and
B, then the resolution is equal to 2N. How to easily understand the difference between
If processing system detects leading and trailing edges of the incremental and absolute encoders?
channels A and B, then the resolution is 4N. A well-known image is that the difference between
In some configurations, it is even possible to electronically incremental and absolute encoders is similar to the
interpolate more precisely this signal and achieve up to 50N difference between a stop watch and a clock. A stop watch
resolution. measures the incremental time that elapses between its
start and stop, just like an incremental encoder will provide
To determine a position, incremental encoders need an a known number of pulses relative to a movement. If you
initialization step that is a lap or a movement to find the “zero” knew the actual time when you started the watch, you can
reference or home position. After this step, each pulse will be tell what time it is later by adding the elapsed time value
accumulated into a counter. In case of a power interruption or from the stop watch. For position control, adding incremental
corruption by electrical transients, the count is lost and the pulses to a known starting position will measure the current
initialization step should be done again. position. When an absolute encoder is used, the actual
Signal A only Signal A + B position will constantly be transmitted, just as a clock will
tell you the current time.
A A
B 5. SSI / FSSI
Resolution = N SSI is a synchronous, point to point, serial communication
channel for digital data transmission. Synchronous data
transmission is one in which the data is transmitted by
synchronizing the transmission at the receiving and sending
Resolution = 2N Resolution = 4N
ends using a common clock signal. Since start and stop bits
Figure 7: Resolution of incremental encoders are not present, this allows a better use of data transmission
This “zero” or home position may be output as a signal known bandwidth for more message bits and makes the whole
as the “marker,” “index,” or “Z channel.” transmission process simpler and easier. The clock needs its
own bandwidth and should be included when determining the
Incremental encoders are principally used in applications
total bandwidth required for communication between the two
where relative movement is required, such as machine or
devices.
process control, robotics...
In general, as mentioned earlier, it is a point to point connection
ABSOLUTE CODING
from a master (Microcontroller) to a slave (rotary encoders).
Absolute coding is basically different than incremental coding. The master controls the clock sequence and the slave transmits
Every position of an absolute encoder is unique. Unlike the current data/value through a shift register. When invoked
an incremental encoder, where position is determined by by the master, the data is clocked out from the shift register.
counting pulses from a zero mark or home base, the absolute The master and slave are synchronized by the common clock
encoder reads a system of coded tracks to establish position of the controller.
information.
The CLOCK and DATA signals are transmitted according to RS-
Absolute encoders do not lose position when power is removed. 422 standards. RS-422, also known as ANSI/TIA/EIA-422-B, is a
Since each position is unique, true position verification is technical standard that specifies the electrical characteristics
available as soon as power is up. It is not necessary to initialize of the balanced voltage digital interface circuit. Data are
the system by returning to home base. transmitted using balanced or differential signaling and the
An absolute encoder’s resolution is defined as the number of CLOCK and DATA lines are basically twisted pair cables.
bits in its output word. This output can be in natural binary or FSSI is the same synchronous interface but includes a start bit
in gray code, which produces only a single bit change at each and is more flexible for other options (Alarm bit, ID encoder....).
step to reduce errors. The maximum bandwidth is 4 MHz.
Absolute encoders will be used when the measurement is
critical and the application cannot afford an initializing step for
www.exxelia.com • info@exxelia.com 9 Tel : + 33 (0)1 49 23 10 00 Page revised - Version 05/16
You might also like
- 471 - Instructions FIDY8BW9 FIDY8BW9-SHPR F1DY8G59 F1DY8G59-SHPR F1DY81G9 F1DY8009 Renew-Led-Desk-LampNo ratings yet471 - Instructions FIDY8BW9 FIDY8BW9-SHPR F1DY8G59 F1DY8G59-SHPR F1DY81G9 F1DY8009 Renew-Led-Desk-Lamp1 page
- P Netzer - Marketing - Non - Tech - 12.2019No ratings yetP Netzer - Marketing - Non - Tech - 12.201943 pages
- How Rotary Encoders Solve Your Positioning Problems:: Oil & Gas IndustryNo ratings yetHow Rotary Encoders Solve Your Positioning Problems:: Oil & Gas Industry6 pages
- Module - 4 Digital and Intelligent Sensors: Position EncodersNo ratings yetModule - 4 Digital and Intelligent Sensors: Position Encoders23 pages
- 3-Robotic sensors-20-Jul-2020Material - I - 20-Jul-2020 - Overview - of - Sensors - For - RoboticsNo ratings yet3-Robotic sensors-20-Jul-2020Material - I - 20-Jul-2020 - Overview - of - Sensors - For - Robotics117 pages
- Disusun Oleh:: Ahmad Rifai Noveni PatrianaNo ratings yetDisusun Oleh:: Ahmad Rifai Noveni Patriana15 pages
- Technical Explanation of Rotary EncodersNo ratings yetTechnical Explanation of Rotary Encoders6 pages
- Encoder Measurements: How-To Guide: 1. Encoder and Applications OverviewNo ratings yetEncoder Measurements: How-To Guide: 1. Encoder and Applications Overview4 pages
- A6 Encoder Guide 2011 - Uk - Low Res - FinalNo ratings yetA6 Encoder Guide 2011 - Uk - Low Res - Final12 pages
- Modeling and Simulation of An Incremental EncoderNo ratings yetModeling and Simulation of An Incremental Encoder14 pages
- Omron - Technical Explanation For Rotary EncodersNo ratings yetOmron - Technical Explanation For Rotary Encoders10 pages
- Osicoder - Rotary Encoders Catalogue 2006.01No ratings yetOsicoder - Rotary Encoders Catalogue 2006.0154 pages
- Mechanical - Optical - Magnetic: Position SensingNo ratings yetMechanical - Optical - Magnetic: Position Sensing23 pages
- Sensors UNIT III (Part 1) : CO3: Perform Simple Process Control ApplicationsNo ratings yetSensors UNIT III (Part 1) : CO3: Perform Simple Process Control Applications91 pages
- EE17401-Measurements and Instrumentation Unit - V: Optical Encoder Type Digital TransducerNo ratings yetEE17401-Measurements and Instrumentation Unit - V: Optical Encoder Type Digital Transducer18 pages
- Position Sensors: Encoders: PhototransistorNo ratings yetPosition Sensors: Encoders: Phototransistor8 pages
- Incremental Encoder Based Position and Speed Identification: Modeling and SimulationNo ratings yetIncremental Encoder Based Position and Speed Identification: Modeling and Simulation13 pages
- Digital Setting Circles For Amateur Telescopes - EncoderNo ratings yetDigital Setting Circles For Amateur Telescopes - Encoder36 pages
- Honeywell Sensing Hawk 1 Inch Series Resolvers Dat 1568635No ratings yetHoneywell Sensing Hawk 1 Inch Series Resolvers Dat 15686357 pages
- Pump Start Up Proceedure (After Short Lock Down Period) : Pre-RUN Checks Post RUN ChecksNo ratings yetPump Start Up Proceedure (After Short Lock Down Period) : Pre-RUN Checks Post RUN Checks1 page
- Standard Parts and Engineering Design Guide Solution Engineering For Noise Vibration Shock and CushioningNo ratings yetStandard Parts and Engineering Design Guide Solution Engineering For Noise Vibration Shock and Cushioning20 pages
- Lead-Lag Damper With Health & Usage Monitoring SystemsNo ratings yetLead-Lag Damper With Health & Usage Monitoring Systems4 pages
- Lifting Anchor Handling To A New Level: BackgroundNo ratings yetLifting Anchor Handling To A New Level: Background5 pages
- The Partial Differential Equation For The Blasius EquationNo ratings yetThe Partial Differential Equation For The Blasius Equation11 pages
- Orkot® TLM & TXM Marine Bearings: Trelleborg Se Aling SolutionsNo ratings yetOrkot® TLM & TXM Marine Bearings: Trelleborg Se Aling Solutions7 pages
- Design of A Single Span Nine Metre Long Glass BridgeNo ratings yetDesign of A Single Span Nine Metre Long Glass Bridge8 pages
- P Block Elements 13 To 18 (Reduced Syllabus)No ratings yetP Block Elements 13 To 18 (Reduced Syllabus)28 pages
- X-Ray Inspection Radiation Detection Radiation DetectionNo ratings yetX-Ray Inspection Radiation Detection Radiation Detection25 pages
- Hydraulic Power Units: D, H and V-Pak SeriesNo ratings yetHydraulic Power Units: D, H and V-Pak Series30 pages
- Beamex Ebook Calibration Essentials PressureNo ratings yetBeamex Ebook Calibration Essentials Pressure40 pages
- CFD Results Discussion Car Parking Ventilation v1No ratings yetCFD Results Discussion Car Parking Ventilation v18 pages
- Quick Installation and User'S Guide For Option Board Optb1'No ratings yetQuick Installation and User'S Guide For Option Board Optb1'2 pages
- Advanced Computer Graphics Bamu University QuestionsNo ratings yetAdvanced Computer Graphics Bamu University Questions2 pages
- POSTER - N.L.Tapia Falcon, M.Huanca Ccamerccoa PDFNo ratings yetPOSTER - N.L.Tapia Falcon, M.Huanca Ccamerccoa PDF1 page
- VCR System Parameters Effect Questions and Answers - SanfoundryNo ratings yetVCR System Parameters Effect Questions and Answers - Sanfoundry7 pages
- Classification Writing and Naming of Inorganic CompoundsNo ratings yetClassification Writing and Naming of Inorganic Compounds40 pages
- Sound - Characteristics of A Sound WaveNo ratings yetSound - Characteristics of A Sound Wave23 pages

















































































































- 471 - Instructions FIDY8BW9 FIDY8BW9-SHPR F1DY8G59 F1DY8G59-SHPR F1DY81G9 F1DY8009 Renew-Led-Desk-Lamp471 - Instructions FIDY8BW9 FIDY8BW9-SHPR F1DY8G59 F1DY8G59-SHPR F1DY81G9 F1DY8009 Renew-Led-Desk-Lamp
- How Rotary Encoders Solve Your Positioning Problems:: Oil & Gas IndustryHow Rotary Encoders Solve Your Positioning Problems:: Oil & Gas Industry
- Module - 4 Digital and Intelligent Sensors: Position EncodersModule - 4 Digital and Intelligent Sensors: Position Encoders
- 3-Robotic sensors-20-Jul-2020Material - I - 20-Jul-2020 - Overview - of - Sensors - For - Robotics3-Robotic sensors-20-Jul-2020Material - I - 20-Jul-2020 - Overview - of - Sensors - For - Robotics
- Encoder Measurements: How-To Guide: 1. Encoder and Applications OverviewEncoder Measurements: How-To Guide: 1. Encoder and Applications Overview
- Sensors UNIT III (Part 1) : CO3: Perform Simple Process Control ApplicationsSensors UNIT III (Part 1) : CO3: Perform Simple Process Control Applications
- EE17401-Measurements and Instrumentation Unit - V: Optical Encoder Type Digital TransducerEE17401-Measurements and Instrumentation Unit - V: Optical Encoder Type Digital Transducer
- Incremental Encoder Based Position and Speed Identification: Modeling and SimulationIncremental Encoder Based Position and Speed Identification: Modeling and Simulation
- Digital Setting Circles For Amateur Telescopes - EncoderDigital Setting Circles For Amateur Telescopes - Encoder
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13
- Honeywell Sensing Hawk 1 Inch Series Resolvers Dat 1568635Honeywell Sensing Hawk 1 Inch Series Resolvers Dat 1568635
- Pump Start Up Proceedure (After Short Lock Down Period) : Pre-RUN Checks Post RUN ChecksPump Start Up Proceedure (After Short Lock Down Period) : Pre-RUN Checks Post RUN Checks
- Standard Parts and Engineering Design Guide Solution Engineering For Noise Vibration Shock and CushioningStandard Parts and Engineering Design Guide Solution Engineering For Noise Vibration Shock and Cushioning
- Lead-Lag Damper With Health & Usage Monitoring SystemsLead-Lag Damper With Health & Usage Monitoring Systems
- Lifting Anchor Handling To A New Level: BackgroundLifting Anchor Handling To A New Level: Background
- The Partial Differential Equation For The Blasius EquationThe Partial Differential Equation For The Blasius Equation
- Orkot® TLM & TXM Marine Bearings: Trelleborg Se Aling SolutionsOrkot® TLM & TXM Marine Bearings: Trelleborg Se Aling Solutions
- Design of A Single Span Nine Metre Long Glass BridgeDesign of A Single Span Nine Metre Long Glass Bridge
- X-Ray Inspection Radiation Detection Radiation DetectionX-Ray Inspection Radiation Detection Radiation Detection
- Quick Installation and User'S Guide For Option Board Optb1'Quick Installation and User'S Guide For Option Board Optb1'
- Advanced Computer Graphics Bamu University QuestionsAdvanced Computer Graphics Bamu University Questions
- POSTER - N.L.Tapia Falcon, M.Huanca Ccamerccoa PDFPOSTER - N.L.Tapia Falcon, M.Huanca Ccamerccoa PDF
- VCR System Parameters Effect Questions and Answers - SanfoundryVCR System Parameters Effect Questions and Answers - Sanfoundry
- Classification Writing and Naming of Inorganic CompoundsClassification Writing and Naming of Inorganic Compounds