Research On MPPT and Single-Stage Grid-Connected For Photovoltaic System
Research On MPPT and Single-Stage Grid-Connected For Photovoltaic System
Download as pdf or txt
You might also like
- PESG ViewBillPdfDocument4 pagesPESG ViewBillPdfYu ShilohNo ratings yet
- CHAPTER 2 Single Phase Power Tutorial QuestionsDocument17 pagesCHAPTER 2 Single Phase Power Tutorial QuestionsFilbert OmbongiNo ratings yet
- Part Katalog A035d897 - I1 - 201101 C1250 C1400 C1500 C1675Document83 pagesPart Katalog A035d897 - I1 - 201101 C1250 C1400 C1500 C1675Ibay Shut100% (3)
- DLR - Basic KnowledgeDocument5 pagesDLR - Basic KnowledgeSelda Coktasar100% (1)
- 48 An Improved Maximum Power Point Tracking For PDFDocument10 pages48 An Improved Maximum Power Point Tracking For PDFSouhaib LoudaNo ratings yet
- RP Report New Second One123Document9 pagesRP Report New Second One123Electrio MurmuNo ratings yet
- A Seven Level Inverter Using A Solar Power Generation SystemDocument7 pagesA Seven Level Inverter Using A Solar Power Generation Systemsasitharan33No ratings yet
- Study of Maximum Power Tracking Techniques and Control ofDocument8 pagesStudy of Maximum Power Tracking Techniques and Control ofwelbertalves6216No ratings yet
- Modeling and Simulation of A GRID-TIED Solar PV System: K.Sakthivel, V.Jayalakshmi, G.RajakumariDocument7 pagesModeling and Simulation of A GRID-TIED Solar PV System: K.Sakthivel, V.Jayalakshmi, G.RajakumariChairul AkbarNo ratings yet
- Modeling and Simulation of PV Array and Its Performance Enhancement Using MPPT (P&O) TechniqueDocument8 pagesModeling and Simulation of PV Array and Its Performance Enhancement Using MPPT (P&O) Techniqueeditor9891No ratings yet
- Backstepping Controller Design To Track Maximum Power in Photovoltaic SystemsDocument10 pagesBackstepping Controller Design To Track Maximum Power in Photovoltaic SystemsalgNo ratings yet
- Highly Efficient Analog Maximum Power Point Tracking (AMPPT) in A Photovoltaic SystemDocument11 pagesHighly Efficient Analog Maximum Power Point Tracking (AMPPT) in A Photovoltaic SystemSusmita PandaNo ratings yet
- Improved Single Stage Grid Connected Solar PV System Using Multilevel InverterDocument6 pagesImproved Single Stage Grid Connected Solar PV System Using Multilevel InverterFaruq FaruqNo ratings yet
- A Maximum Power Point Tracking Technique For Partially Shaded Photovoltaic Systems in MicrogridsDocument11 pagesA Maximum Power Point Tracking Technique For Partially Shaded Photovoltaic Systems in MicrogridsRam KumarNo ratings yet
- Design and Implementation of Three Phase To Single Phase Solid State TransformerDocument37 pagesDesign and Implementation of Three Phase To Single Phase Solid State TransformerUsha SreeNo ratings yet
- RP Report New FourDocument9 pagesRP Report New FourElectrio MurmuNo ratings yet
- Maximum Power Point Tracking Controller For Photovoltaic System Using Sliding Mode ControlDocument5 pagesMaximum Power Point Tracking Controller For Photovoltaic System Using Sliding Mode Controlt.benaissaNo ratings yet
- Design and Implementation of A Low Cost MPPT Controller For Solar PV SystemDocument6 pagesDesign and Implementation of A Low Cost MPPT Controller For Solar PV SystemAhmed Shoeeb0% (1)
- Tumi Mofokeng - 39354563 Conference PaperDocument4 pagesTumi Mofokeng - 39354563 Conference PapermkayNo ratings yet
- Back-Stepping Control of Off-Grid PV InverterDocument6 pagesBack-Stepping Control of Off-Grid PV InverterMartino Ojwok AjangnayNo ratings yet
- T-S Fuzzy Model Based Maximum Power Point Tracking Control of Photovoltaic SystemDocument8 pagesT-S Fuzzy Model Based Maximum Power Point Tracking Control of Photovoltaic SystemAdvika SharmaNo ratings yet
- Grid Interactive PV System With Harmonic and Reactive Power Compensation Features Using A Novel Fuzzy Logic Based MPPTDocument6 pagesGrid Interactive PV System With Harmonic and Reactive Power Compensation Features Using A Novel Fuzzy Logic Based MPPTvinay kumarNo ratings yet
- EnergiesDocument20 pagesEnergiesKaiba SetoNo ratings yet
- RP Report New ThirdDocument9 pagesRP Report New ThirdElectrio MurmuNo ratings yet
- Enhancing Solar Photovoltaic System Efficiency A Comparative Analysis of Intelligent ANN PandO MPPT Controller Against Traditional AlgorithmsDocument10 pagesEnhancing Solar Photovoltaic System Efficiency A Comparative Analysis of Intelligent ANN PandO MPPT Controller Against Traditional AlgorithmsEditor IJTSRDNo ratings yet
- 276 ChiumeoDocument6 pages276 ChiumeoMorris SibiyaNo ratings yet
- A Small Grid-Connected PV System Controlled by The PLCDocument2 pagesA Small Grid-Connected PV System Controlled by The PLCtongaiNo ratings yet
- Fuzzy-Pid Based Indirect Incremental Conductance MPPT Algorithm For PV SystemDocument6 pagesFuzzy-Pid Based Indirect Incremental Conductance MPPT Algorithm For PV SystemAhmed.AhmedNo ratings yet
- RP Report New FinalDocument10 pagesRP Report New FinalElectrio MurmuNo ratings yet
- 2208EE006.ourside - GridsystemDocument6 pages2208EE006.ourside - GridsystemssNo ratings yet
- Mrs. Kapil Parikh Mahavir Singh: Supervisor Submitted byDocument27 pagesMrs. Kapil Parikh Mahavir Singh: Supervisor Submitted byMahavir SinghNo ratings yet
- 712 RamosDocument6 pages712 RamosAbdoo SalemNo ratings yet
- Comparison of PV Panels MPPT Techniques Applied To Solar Water Pumping SystemDocument10 pagesComparison of PV Panels MPPT Techniques Applied To Solar Water Pumping SystemInternational Journal of Power Electronics and Drive SystemsNo ratings yet
- Comparative Efficiency Assessment of MPPT Algorithms in Photovoltaic SystemsDocument7 pagesComparative Efficiency Assessment of MPPT Algorithms in Photovoltaic SystemsmusNo ratings yet
- 82Document7 pages82Singam SridharNo ratings yet
- PQ and PV Control of Photovoltaic GeneratorsDocument8 pagesPQ and PV Control of Photovoltaic GeneratorsBreno NunesNo ratings yet
- Powereng13 Turkey Beriber 2Document7 pagesPowereng13 Turkey Beriber 2Ahmed ShoeebNo ratings yet
- IJRAR1ACP025Document7 pagesIJRAR1ACP025Vignesh U PNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument8 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- The Modified Control Method For The Single-Stage Three-Phase Grid-Connected Photovoltaic SystemDocument14 pagesThe Modified Control Method For The Single-Stage Three-Phase Grid-Connected Photovoltaic SystemHà Văn ĐạtNo ratings yet
- Back-Stepping Control of Off-Grid PV InverterDocument6 pagesBack-Stepping Control of Off-Grid PV InverterMartino Ojwok AjangnayNo ratings yet
- Comparative Analysis of Backstepping and Active Disturbance Rejection Control Approach Used in Photovoltaic System Connected To The GridDocument10 pagesComparative Analysis of Backstepping and Active Disturbance Rejection Control Approach Used in Photovoltaic System Connected To The GridDileep VarmaNo ratings yet
- SEPIC Converter Based Photovoltaic System With Particle Swarm Optimization MPPTDocument6 pagesSEPIC Converter Based Photovoltaic System With Particle Swarm Optimization MPPTWARSE JournalsNo ratings yet
- An Efficient Constant Current Controller For PV Solar Power Generator Integrated With The GridDocument6 pagesAn Efficient Constant Current Controller For PV Solar Power Generator Integrated With The GridsunilkumareceNo ratings yet
- Current Fed Full-Bridge Converter With Voltage Doubler For Photovoltaic System ApplicationsDocument6 pagesCurrent Fed Full-Bridge Converter With Voltage Doubler For Photovoltaic System Applicationsali ghalibNo ratings yet
- Maximum Power Point Tracker of A Photovoltaic System Using Sliding Mode ControlDocument4 pagesMaximum Power Point Tracker of A Photovoltaic System Using Sliding Mode Controlsalvador2meNo ratings yet
- Perturb and Observe Method MATLAB Simulink and Design of PV System Using Buck Boost ConverterDocument5 pagesPerturb and Observe Method MATLAB Simulink and Design of PV System Using Buck Boost ConverterGss ChaitanyaNo ratings yet
- RP Report New SecondDocument10 pagesRP Report New SecondElectrio MurmuNo ratings yet
- MPPT AlgorithmDocument7 pagesMPPT AlgorithmVishnu Kumar NadarNo ratings yet
- 2023 ARTICLE, PV System With Battery Storage Using Bidirectional DC-DC ConverterDocument11 pages2023 ARTICLE, PV System With Battery Storage Using Bidirectional DC-DC ConverterlcordobaNo ratings yet
- Maximum Power Point Tracking Control of PV System For DC Motors Drive With Neural NetworkDocument6 pagesMaximum Power Point Tracking Control of PV System For DC Motors Drive With Neural NetworkHackbartNo ratings yet
- A Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power CompensationDocument6 pagesA Single-Stage Three-Phase Grid-Connected Photovoltaic System With Modified MPPT Method and Reactive Power Compensationsandeepbabu28No ratings yet
- Simulation of A Solar MPPT Charger Using Cuk Converter For Standalone ApplicationDocument6 pagesSimulation of A Solar MPPT Charger Using Cuk Converter For Standalone ApplicationcashnuiNo ratings yet
- 3 DacDocument7 pages3 DacAde safitraNo ratings yet
- M.tech ThesisDocument59 pagesM.tech ThesisRama Krishna100% (1)
- 10.15546 - Aeei-2021-0014 3phase Pi ContrlDocument8 pages10.15546 - Aeei-2021-0014 3phase Pi ContrlgeremuNo ratings yet
- An Overview of PV SystemDocument6 pagesAn Overview of PV SystemZahoor AbbasNo ratings yet
- PLL-less Single Stage Grid-Connected Photovoltaic Inverter With Rapid Maximum Power Point TrackingDocument8 pagesPLL-less Single Stage Grid-Connected Photovoltaic Inverter With Rapid Maximum Power Point TrackingpksahunitrklNo ratings yet
- Comparative Study of P&O and Inc MPPT AlgorithmsDocument7 pagesComparative Study of P&O and Inc MPPT AlgorithmsAJER JOURNALNo ratings yet
- Maximum Power Point Tracking Using Fuzzy Logic Controller Under Partial ConditionsDocument14 pagesMaximum Power Point Tracking Using Fuzzy Logic Controller Under Partial Conditionsaravindan476No ratings yet
- IJET EvaluatingtheperformanceandefficiencyofMPPTDocument6 pagesIJET EvaluatingtheperformanceandefficiencyofMPPTShafkat TashziNo ratings yet
- A Single Phase Photovoltaic Inverter Control For Grid Connected SystemDocument16 pagesA Single Phase Photovoltaic Inverter Control For Grid Connected SystemRAMPRASATH EEENo ratings yet
- Ficha Solarnova 550W - EngDocument2 pagesFicha Solarnova 550W - EngHugo AngelesNo ratings yet
- Physics Ssc-I: Answer Sheet No.Document6 pagesPhysics Ssc-I: Answer Sheet No.Mohsin SyedNo ratings yet
- Magnetization Curve of DC Generator - Electrical4uDocument5 pagesMagnetization Curve of DC Generator - Electrical4uM Kumar Marimuthu0% (1)
- CCJ Issue 55 PDFDocument94 pagesCCJ Issue 55 PDFMariano Salomon PaniaguaNo ratings yet
- Final Put 2023Document3 pagesFinal Put 2023Akash AnandNo ratings yet
- Ni-CD Battery Charger SpecificationDocument18 pagesNi-CD Battery Charger SpecificationAdrianne DouglasNo ratings yet
- G7L Omron RelayDocument13 pagesG7L Omron RelayLong NguyễnNo ratings yet
- Smart ProposalDocument13 pagesSmart ProposalWoldemariam WorkuNo ratings yet
- Power PlantsDocument12 pagesPower PlantsLinda Leon TomaNo ratings yet
- Hydrogen Generators: Hydrogen On Demand Up To 1,300 Ml/minDocument2 pagesHydrogen Generators: Hydrogen On Demand Up To 1,300 Ml/minAnish KarthikeyanNo ratings yet
- Process Control Design and Practice - A New ApproachDocument13 pagesProcess Control Design and Practice - A New ApproachIqbal PutraNo ratings yet
- Pen-Hase Rotection Ssues or Otors: Pacific Gas and Electric CompanyDocument5 pagesPen-Hase Rotection Ssues or Otors: Pacific Gas and Electric CompanyAnamarialuzNo ratings yet
- Transformer FaultDocument2 pagesTransformer FaultManish Kumar BhardwajNo ratings yet
- List of Coolers and HeatersDocument2 pagesList of Coolers and HeatersadityasahayNo ratings yet
- AccraGhana IataPresentationDocument20 pagesAccraGhana IataPresentationRaymondNo ratings yet
- CHW2204-1001-M32-SY-008 - REV.D - Lifting Internal Platform Into TPDocument3 pagesCHW2204-1001-M32-SY-008 - REV.D - Lifting Internal Platform Into TPPhúc Linh NguyễnNo ratings yet
- Report Pertaining To The Furnace Explosion Caused in Boiler KTKDocument10 pagesReport Pertaining To The Furnace Explosion Caused in Boiler KTKChandra Mouli Keelara100% (1)
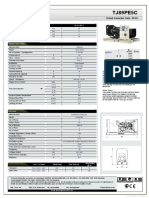
- TJ89PE5CDocument1 pageTJ89PE5Cblago956No ratings yet
- Procedure Test3Document1 pageProcedure Test3Km. Nanda RismapramantaNo ratings yet
- Project Schedule in Word 2024 Version 2-1Document1 pageProject Schedule in Word 2024 Version 2-1felome1891No ratings yet
- Chapter 2Document149 pagesChapter 2A LamperougeNo ratings yet
- Cusum LecDocument10 pagesCusum LecAliNo ratings yet
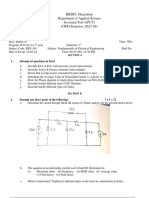
- Power Electronics Past QuestionsDocument8 pagesPower Electronics Past QuestionsSam MaosaNo ratings yet
- HT Tutorial 1-3Document3 pagesHT Tutorial 1-3pawanNo ratings yet
- Fxs HV Cruse ShiftDocument25 pagesFxs HV Cruse ShiftblendedvitaminNo ratings yet
- Unit 11. Sources of EnergyDocument11 pagesUnit 11. Sources of Energyiroshizu171105No ratings yet