CMC Arm
CMC Arm
Download as ppt, pdf, or txt
At a glance
Powered by AI
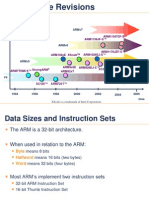
The document discusses embedded systems and microcontrollers, specifically the ARM7. It provides definitions of embedded systems and examples like refrigerators and cars. It also describes the components and architecture of the ARM7 microcontroller.
An embedded system is a combination of hardware and software that is part of a larger machine or device. It is designed to perform one or a few dedicated functions, operates without human intervention, and may need to respond to events in real time.
Some examples of embedded systems mentioned are refrigerators, car doors, and electronic ping pong games.
You might also like
- ARM Microcontrollers Programming for Embedded SystemsFrom EverandARM Microcontrollers Programming for Embedded SystemsRating: 5 out of 5 stars5/5 (1)
- So Sanh 8086 Va ARMDocument2 pagesSo Sanh 8086 Va ARMDuy Hùng NguyễnNo ratings yet
- Arm9 Embedded Book-GuideDocument67 pagesArm9 Embedded Book-GuideNguyễn Trường ĐứcNo ratings yet
- Arm CortexDocument31 pagesArm CortexKri Shna100% (1)
- Arm7 ArchitectureDocument20 pagesArm7 ArchitectureCharitha CherryNo ratings yet
- The ARM Instruction Set: Advanced RISC MachinesDocument58 pagesThe ARM Instruction Set: Advanced RISC MachinesarthicseNo ratings yet
- Introduction To Free-RTOS: Deepak D'SouzaDocument34 pagesIntroduction To Free-RTOS: Deepak D'SouzaNguyễn QuânNo ratings yet
- ARM Processor CoreDocument34 pagesARM Processor CorevarshaksNo ratings yet
- Arm7tdmi-S CpuDocument40 pagesArm7tdmi-S CpuEric JohnathanNo ratings yet
- ArmDocument203 pagesArmJannathul Firdous MohamedNo ratings yet
- ARM OverviewDocument43 pagesARM OverviewSelva KumarNo ratings yet
- The ARM Instruction Set: Advanced RISC MachinesDocument83 pagesThe ARM Instruction Set: Advanced RISC MachinesABHAYNo ratings yet
- The ARM Instruction Set: Advanced RISC MachinesDocument58 pagesThe ARM Instruction Set: Advanced RISC MachinesPoorva RathoreNo ratings yet
- Hardware: Hardware For I/O - OverviewDocument17 pagesHardware: Hardware For I/O - Overviewosmanatam1No ratings yet
- ARM: An Advanced MicrocontrollerDocument54 pagesARM: An Advanced MicrocontrollershubhamNo ratings yet
- ARM Architecture OverviewDocument19 pagesARM Architecture OverviewAmit Khare100% (1)
- Architecture of ARM Processor Family: Seminar On Architectures and Design MethodsDocument27 pagesArchitecture of ARM Processor Family: Seminar On Architectures and Design MethodsSree Harsha VemulapalliNo ratings yet
- ARM Instruction Sets and Program: Jin-Fu Li Department of Electrical Engineering National Central UniversityDocument116 pagesARM Instruction Sets and Program: Jin-Fu Li Department of Electrical Engineering National Central UniversityRANJITHANo ratings yet
- ARMDocument27 pagesARMthebestdivyaNo ratings yet
- Arm InstDocument75 pagesArm InstJohnJohnNo ratings yet
- Lecture 3Document88 pagesLecture 3Hemanth KumarNo ratings yet
- ArmDocument43 pagesArmBharavi K S100% (1)
- ACE201slides 8Document75 pagesACE201slides 8alexistheNo ratings yet
- CEG2400 - Microcomputer Systems ARM Exceptions: Lecture 7: InterruptsDocument7 pagesCEG2400 - Microcomputer Systems ARM Exceptions: Lecture 7: Interruptsvn00426941No ratings yet
- Arm OverviewDocument43 pagesArm OverviewAngelina HoffmanNo ratings yet
- ARM ARM ARM ARM: Introduction and Architecture Introduction and ArchitectureDocument70 pagesARM ARM ARM ARM: Introduction and Architecture Introduction and ArchitecturePavan KumarNo ratings yet
- ARM7TDMI ProcessorDocument44 pagesARM7TDMI Processormuralik_64No ratings yet
- ESRTPDocument13 pagesESRTPadvaitkaleNo ratings yet
- Arm 2011Document55 pagesArm 2011kbkkrNo ratings yet
- 1 ARM IntroductionDocument87 pages1 ARM IntroductionCharles KellyNo ratings yet
- EE3018-EP-QUESTION-BANK-2-marksnewDocument21 pagesEE3018-EP-QUESTION-BANK-2-marksnewNithiyanantham NagarajanNo ratings yet
- Slide 2 ARM Architecture and Instruction SetDocument234 pagesSlide 2 ARM Architecture and Instruction Setgsingh20be20No ratings yet
- ARM 1vDocument31 pagesARM 1vsuntosh_14No ratings yet
- ARM Introduction & Instruction Set Architecture: Aleksandar MilenkovicDocument31 pagesARM Introduction & Instruction Set Architecture: Aleksandar Milenkovicavireddy1No ratings yet
- CH 08Document19 pagesCH 08adddataNo ratings yet
- ARM Architecture Basics PDFDocument66 pagesARM Architecture Basics PDFSwarnadeep Dhar100% (1)
- Task Switching:: JMP Call JMP Call Iret JMP Call IretDocument19 pagesTask Switching:: JMP Call JMP Call Iret JMP Call IretAshish PatilNo ratings yet
- 3 ARM ExceptionsDocument26 pages3 ARM ExceptionsSaket JainNo ratings yet
- ARM Introduction & Instruction Set ArchitectureDocument71 pagesARM Introduction & Instruction Set Architecturebala100% (1)
- ARM7 - LPC 2148 ProcessorDocument50 pagesARM7 - LPC 2148 ProcessorHong ShaeNo ratings yet
- ARM ArchitectureDocument6 pagesARM ArchitectureCarlos AraujoNo ratings yet
- Unit 5a - CPU DesignDocument64 pagesUnit 5a - CPU DesignMʌŋı ßʌķŞhı100% (1)
- l18 ArmDocument71 pagesl18 ArmVamsi SomisettyNo ratings yet
- MPC555Document27 pagesMPC555Mohammad Gulam AhamadNo ratings yet
- Lecture 3Document88 pagesLecture 3Praveen RathnamNo ratings yet
- Ise 2Document8 pagesIse 2Tejas FattewaleNo ratings yet
- ARM ProcessorDocument88 pagesARM ProcessorAyan AcharyaNo ratings yet
- Interrupts and Traps in Oberon-ARMDocument3 pagesInterrupts and Traps in Oberon-ARMmqt99311zwoho.comNo ratings yet
- 881 AsmDocument23 pages881 AsmFrang JabardNo ratings yet
- Introduction To Processor Design & The ARM ArchitectureDocument65 pagesIntroduction To Processor Design & The ARM Architectureveer_frnd89100% (1)
- ARM Teaching MaterialDocument33 pagesARM Teaching MaterialVishal NairNo ratings yet
- ARM Teaching MaterialDocument33 pagesARM Teaching MaterialViswa PraveenNo ratings yet
- Qustions-Solutions by JamalDocument9 pagesQustions-Solutions by JamalJLM SSNo ratings yet
- Advanced RISC Machine-ARM Notes BhurchandiDocument8 pagesAdvanced RISC Machine-ARM Notes BhurchandiVipin TiwariNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Multicore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCFrom EverandMulticore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Marie: An Introduction To A Simple ComputerDocument75 pagesMarie: An Introduction To A Simple ComputerAkhil TripathiNo ratings yet
- IV Eee I Sem MPMC Lab Manual (Ee432)Document50 pagesIV Eee I Sem MPMC Lab Manual (Ee432)Gowri ShankarNo ratings yet
- COMSATS Institute of Information Technology WAH CampusDocument63 pagesCOMSATS Institute of Information Technology WAH CampusjouliNo ratings yet
- Lecture 10a: Digital Signal Processors: A TI Architectural HistoryDocument61 pagesLecture 10a: Digital Signal Processors: A TI Architectural HistoryGayathriNo ratings yet
- 8086 Microprocessor Architecture - Programmable View: Lecture No.2 Mohammed D. Ali 3 Stage 2018-2019Document39 pages8086 Microprocessor Architecture - Programmable View: Lecture No.2 Mohammed D. Ali 3 Stage 2018-2019Mohammed Dyhia AliNo ratings yet
- Siemens S7 1200 Ethernet PDFDocument13 pagesSiemens S7 1200 Ethernet PDFStephen BlanchardNo ratings yet
- Architecture of 8086 MicroprocessorDocument15 pagesArchitecture of 8086 MicroprocessorAnwar Ali KhanNo ratings yet
- 2-16 Bit Microprocessor 8086Document20 pages2-16 Bit Microprocessor 8086afzal_a75% (4)
- AVR202: 16-Bit Arithmetics: 8-Bit MCU With Downloadable Flash Application NoteDocument2 pagesAVR202: 16-Bit Arithmetics: 8-Bit MCU With Downloadable Flash Application NoteRichard KrillNo ratings yet
- Chapter 3 Z80 Microprocessor ArchitectureDocument30 pagesChapter 3 Z80 Microprocessor ArchitecturehowlerbrNo ratings yet
- MN103Document212 pagesMN103DenisMalekNo ratings yet
- Cs2259 - Microprocessors LaboratoryDocument58 pagesCs2259 - Microprocessors LaboratoryrishikarthickNo ratings yet
- Boot Loader From ScratchDocument20 pagesBoot Loader From ScratchSiva CharanNo ratings yet
- Microprocessor Architecture-Lab TutorialDocument47 pagesMicroprocessor Architecture-Lab TutorialRaad AljuboryNo ratings yet
- Architecture of 8031 8051 MicrocontrollerDocument7 pagesArchitecture of 8031 8051 MicrocontrollersathishNo ratings yet
- EE353 L03 - PIC24 FamilyDocument75 pagesEE353 L03 - PIC24 FamilyJay Brady0% (1)
- Registers PDFDocument28 pagesRegisters PDFAnonymous SbdYwONo ratings yet
- DSPADocument29 pagesDSPADrakshayaniMurgodNo ratings yet
- Acoustic Fingerprinting SystemDocument41 pagesAcoustic Fingerprinting SystemAinuddin FaizanNo ratings yet
- Architecture Diagram of 8085 MicroprocessorDocument4 pagesArchitecture Diagram of 8085 MicroprocessorbhatiaharryjassiNo ratings yet
- Practical 2 Data TransferDocument3 pagesPractical 2 Data TransferHet PatelNo ratings yet
- Extra Exercise Chapter 4 Cache MemoryDocument11 pagesExtra Exercise Chapter 4 Cache MemorySundari MuthuNo ratings yet
- Spitbol 3.7 386Document368 pagesSpitbol 3.7 386Waqas Akram GondalNo ratings yet
- ReadmeDocument4 pagesReadmeJOjo AfNo ratings yet
- PLCINSTDocument1,448 pagesPLCINSTCeirSanchezCalderonNo ratings yet
- 15ME608 LAB MANUAL-finalDocument40 pages15ME608 LAB MANUAL-finalPRADEEPKUMAR MNo ratings yet
- MB Ref GuideDocument194 pagesMB Ref GuideMartin OverstromNo ratings yet