Online Search Agents
Online Search Agents
Download as pptx, pdf, or txt
You might also like
- PPL Complete Notes JntuhDocument125 pagesPPL Complete Notes JntuhAngel SweetyNo ratings yet
- AI Module 1, 2 Notes 4 TH Sem UpdatedDocument41 pagesAI Module 1, 2 Notes 4 TH Sem UpdatedAkhilNo ratings yet
- Unit I - Part I NotesDocument33 pagesUnit I - Part I NotesManju Ancy John Immanuel100% (7)
- Deep Learning R18 Jntuh Lab ManualDocument21 pagesDeep Learning R18 Jntuh Lab Manualnphotographer990% (1)
- Machine Learning Unit 1Document112 pagesMachine Learning Unit 1Aanchal Padmavat100% (7)
- OOSE Notes 1 PDFDocument108 pagesOOSE Notes 1 PDFpraveen kumar100% (3)
- AI UNIT-3 Knowledge RepresentationDocument58 pagesAI UNIT-3 Knowledge RepresentationPriyansh Gupta100% (1)
- Question Bank: Subject Name: Artificial Intelligence & Machine Learning Subject Code: 18CS71 Sem: VIIDocument8 pagesQuestion Bank: Subject Name: Artificial Intelligence & Machine Learning Subject Code: 18CS71 Sem: VIIDileep Kn100% (2)
- 2.9 Reasoning Systems For Categories, Reasoning With Default InformationDocument12 pages2.9 Reasoning Systems For Categories, Reasoning With Default InformationAnime Geeker100% (2)
- CS2351 - Artificial Intelligence-2 MarksDocument16 pagesCS2351 - Artificial Intelligence-2 MarksVignesh Vicky100% (1)
- Digital Image Processing Notes VtuDocument72 pagesDigital Image Processing Notes VtuNikhil KumarNo ratings yet
- Unit 4Document57 pagesUnit 4Poongodi100% (3)
- Artificial Intelligence Unit-4 First Order LogicDocument11 pagesArtificial Intelligence Unit-4 First Order LogicMukesh100% (2)
- Unit-2.4 Searching With Partial Observations - CSPs - Back TrackingDocument42 pagesUnit-2.4 Searching With Partial Observations - CSPs - Back Trackingmani111111100% (1)
- ML GTU SolutionDocument83 pagesML GTU SolutionDIGVIJAY SINH CHAUHANNo ratings yet
- S MapReduce Types FormatsDocument22 pagesS MapReduce Types FormatsLokedhNo ratings yet
- Ai Viva QuestionsDocument9 pagesAi Viva QuestionsPritesh Bora100% (2)
- 21cs644 Module 3Document95 pages21cs644 Module 3gmaheshreddy229No ratings yet
- CCS356 Oose SyllabusDocument1 pageCCS356 Oose SyllabusSubbalakshmi Perumalsamy100% (1)
- 1) Explain in Detail Core Function of Edge Analytics With DiagramDocument13 pages1) Explain in Detail Core Function of Edge Analytics With DiagramsarakeNo ratings yet
- AI Unit-3 NotesDocument23 pagesAI Unit-3 NotesRajeev SahaniNo ratings yet
- Anatomy of Mapreduce Job Run: Some Slides Are Taken From Cmu PPT PresentationDocument73 pagesAnatomy of Mapreduce Job Run: Some Slides Are Taken From Cmu PPT PresentationRajesh Kumar RakasulaNo ratings yet
- CS3491 Artificial Intelligence and Machine Learning Nov Dec 2023 Question Paper DownloadDocument2 pagesCS3491 Artificial Intelligence and Machine Learning Nov Dec 2023 Question Paper DownloadGiruba100% (1)
- Cs3551 Distributed Computing L T P CDocument2 pagesCs3551 Distributed Computing L T P CR.V.Lakshmi Priya Assistant Professor - IT100% (1)
- Module - 1 Notes - SEPM (21CS61)Document29 pagesModule - 1 Notes - SEPM (21CS61)Gagan V hallurNo ratings yet
- Counting Ones in A WindowDocument11 pagesCounting Ones in A WindowDHRUV SINGHALNo ratings yet
- CS6551 Computer Networks Two Mark With AnswerDocument35 pagesCS6551 Computer Networks Two Mark With AnswerPRIYA RAJI100% (7)
- Distributed Computing Question PaperDocument2 pagesDistributed Computing Question Paperatul211988No ratings yet
- Viva QuestionsDocument37 pagesViva QuestionsBrynal Correia100% (1)
- Unit 2Document48 pagesUnit 2Bhargav RajNo ratings yet
- State Testing, and Testability Tips. Power of A Matrix, Node Reduction AlgorithmDocument13 pagesState Testing, and Testability Tips. Power of A Matrix, Node Reduction AlgorithmSeerapu RameshNo ratings yet
- Data Analytics Unit 3 NotesDocument28 pagesData Analytics Unit 3 NotesSmash art boy100% (2)
- Module-02 AIML 21CS54Document27 pagesModule-02 AIML 21CS54Deepali Konety67% (3)
- Goal Stack PlanningDocument10 pagesGoal Stack Planning321126510L03 kurmapu dharaneeswar100% (6)
- Learning in Artificial IntelligenceDocument8 pagesLearning in Artificial IntelligenceR Ravi Teja67% (3)
- 21cs54-Module 1Document15 pages21cs54-Module 1Deepali KonetyNo ratings yet
- Internship PresentationDocument16 pagesInternship PresentationG n MeghanaNo ratings yet
- Data Mining NotesDocument75 pagesData Mining NotesAravind RossiNo ratings yet
- Characteristics of Soft ComputingDocument11 pagesCharacteristics of Soft ComputingSiva88% (8)
- CN Lab Viva QuestionsDocument4 pagesCN Lab Viva QuestionsChetan Raj100% (3)
- NLP Question Paper SolutionDocument27 pagesNLP Question Paper SolutionSruja KoshtiNo ratings yet
- IR Question BankDocument29 pagesIR Question BankAmaya Ema100% (2)
- 21CSL66 Lab ManualDocument60 pages21CSL66 Lab ManualdeepakchabriNo ratings yet
- OS Question Bank - All Modules - II ND YearDocument8 pagesOS Question Bank - All Modules - II ND YearVamshidhar Reddy100% (2)
- Dbms Vtu NotesDocument104 pagesDbms Vtu NotessatyaNo ratings yet
- Conceptual Dependency in Artificial IntelligenceDocument34 pagesConceptual Dependency in Artificial IntelligenceKrishanaKantPareek100% (6)
- Designing A Learning SystemDocument12 pagesDesigning A Learning SystemPooja DixitNo ratings yet
- Software Testing Viva Questions and Answer Mca Sem5Document11 pagesSoftware Testing Viva Questions and Answer Mca Sem5Unknown100% (5)
- Specialized Process Models: Muhammad NomanDocument20 pagesSpecialized Process Models: Muhammad NomanMohammad NomanNo ratings yet
- CS3491 Ai Lab Manula R2021 FinalDocument43 pagesCS3491 Ai Lab Manula R2021 FinalShamilie M100% (3)
- Image and Video AnalyticsDocument3 pagesImage and Video AnalyticsJetlin C PNo ratings yet
- AI & DS - AD3351 DAA - 2marks (Unit 1 & 2) Question BankDocument7 pagesAI & DS - AD3351 DAA - 2marks (Unit 1 & 2) Question BankDHANYANo ratings yet
- State Space Search: Water Jug ProblemDocument14 pagesState Space Search: Water Jug ProblemTariq Iqbal100% (2)
- AO Star AlgorithmDocument5 pagesAO Star AlgorithmMitesh VyasNo ratings yet
- Artificial Intelligence Unit-2 Solving Problems by SearchingDocument11 pagesArtificial Intelligence Unit-2 Solving Problems by SearchingMukeshNo ratings yet
- r18 - Big Data Analytics - Cse (DS)Document1 pager18 - Big Data Analytics - Cse (DS)aarthi dev0% (1)
- DBMS UNIT-3 NotesDocument45 pagesDBMS UNIT-3 NotesMr. RAVI KUMAR I100% (3)
- Module-3 IoT NotesDocument9 pagesModule-3 IoT NotesNeetha DasNo ratings yet
- Lecture3 - 3 - Structure of AgentsDocument22 pagesLecture3 - 3 - Structure of AgentsSurekha Sakhare0% (1)
- Lecture Intelligent AgentsDocument31 pagesLecture Intelligent AgentsawnuvpewgcwxqdutluNo ratings yet
- Search 041005Document39 pagesSearch 041005Hari DeivasigamaniNo ratings yet
- Output Devices: Graphics, 3-D Sound, Haptics and OlfactoryDocument160 pagesOutput Devices: Graphics, 3-D Sound, Haptics and OlfactoryHari DeivasigamaniNo ratings yet
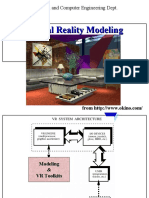
- Virtual Reality ModelingDocument163 pagesVirtual Reality ModelingHari DeivasigamaniNo ratings yet
- Augmented Reality and Virtual Reality For GamingDocument10 pagesAugmented Reality and Virtual Reality For GamingHari DeivasigamaniNo ratings yet
- Computing Architectures For Virtual Reality: Electrical and Computer Engineering DeptDocument136 pagesComputing Architectures For Virtual Reality: Electrical and Computer Engineering DeptHari Deivasigamani100% (1)
- Virtual Reality App DevelopmentDocument19 pagesVirtual Reality App DevelopmentHari DeivasigamaniNo ratings yet
- Input Devices: Trackers, Navigation and Gesture InterfacesDocument108 pagesInput Devices: Trackers, Navigation and Gesture InterfacesHari Deivasigamani100% (1)
- Tracking: Augmented Reality - Principles and PracticeDocument13 pagesTracking: Augmented Reality - Principles and PracticeHari DeivasigamaniNo ratings yet
- Chapter 1Document32 pagesChapter 1Hari DeivasigamaniNo ratings yet
- Displays: Augmented Reality - Principles and PracticeDocument44 pagesDisplays: Augmented Reality - Principles and PracticeHari DeivasigamaniNo ratings yet
- Arvr QBDocument5 pagesArvr QBHari DeivasigamaniNo ratings yet
- Unit I Ar VRDocument20 pagesUnit I Ar VRHari DeivasigamaniNo ratings yet