Chap 2
Chap 2
Download as ppt, pdf, or txt
You might also like
- Item Bank Maths Class 9Document247 pagesItem Bank Maths Class 9Henry SolomonNo ratings yet
- Geriatric NutritionDocument45 pagesGeriatric Nutritionveena viswanathan100% (2)
- Lecture02 Image ProcessingDocument39 pagesLecture02 Image ProcessingHatem DheerNo ratings yet
- Image Processing: By: Prof. Monika ShahDocument57 pagesImage Processing: By: Prof. Monika ShahSUSAN KHADKANo ratings yet
- Image Processing Part 3Document5 pagesImage Processing Part 3Felix2ZNo ratings yet
- Data Visualization - Data MiningDocument11 pagesData Visualization - Data Miningzhiarabas31No ratings yet
- Image Enhancement in Spatial Domain: Pixel Operations and Histogram ProcessingDocument59 pagesImage Enhancement in Spatial Domain: Pixel Operations and Histogram ProcessingMahreenNo ratings yet
- Computer Vision CS-6350: Prof. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai - 600036Document48 pagesComputer Vision CS-6350: Prof. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai - 600036Nadia F Mohammad Al-RoshdeeNo ratings yet
- FSM Neet 2 PDFDocument50 pagesFSM Neet 2 PDFSuyash Dahake100% (2)
- Computer Vision: Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai - 600036Document21 pagesComputer Vision: Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai - 600036Sunil NaikNo ratings yet
- Sns College of Engineering: Big Data AnalyticsDocument17 pagesSns College of Engineering: Big Data Analyticsrajianand2No ratings yet
- 50 Years of Data ScienceDocument23 pages50 Years of Data ScienceManuel PeñafielNo ratings yet
- Proposed PHD in Data ScienceDocument166 pagesProposed PHD in Data ScienceAkhmad YusufNo ratings yet
- (Big) Data ScienceDocument25 pages(Big) Data Sciencedan_mallingerNo ratings yet
- BIG DATA Research PDFDocument9 pagesBIG DATA Research PDFDhaval DadhaniyaNo ratings yet
- Data Analysis Science CourseworkDocument4 pagesData Analysis Science Courseworkiuhvgsvcf100% (2)
- Building Information Modelling (BIM) : Group ProjectDocument18 pagesBuilding Information Modelling (BIM) : Group ProjectShinde vishal100% (1)
- UGC NET Syllabus 2018 For Computer Science and ApplicationDocument9 pagesUGC NET Syllabus 2018 For Computer Science and Applicationshashi28janNo ratings yet
- Data Processing and Data AnalysisDocument9 pagesData Processing and Data AnalysisTilak KarmakarNo ratings yet
- Whole NumbersDocument6 pagesWhole NumbersShakeel vPENo ratings yet
- Lab2 - Arithmetic and Logic OpertaionsDocument5 pagesLab2 - Arithmetic and Logic OpertaionsbhaskarNo ratings yet
- R MaterialDocument105 pagesR MaterialadddataNo ratings yet
- LEXICONDocument29 pagesLEXICONAdvance Certificate in English Language TeachingNo ratings yet
- Simple Tutorial in RDocument15 pagesSimple Tutorial in RklugshitterNo ratings yet
- JEE ADVANCED 2025 Syllabus (Latest)Document13 pagesJEE ADVANCED 2025 Syllabus (Latest)kuntalhjNo ratings yet
- Reporting and Query Tools and Applications: Tool CategoriesDocument13 pagesReporting and Query Tools and Applications: Tool Categoriesdurai muruganNo ratings yet
- Complete 11th - Maths (JEE 2025)Document104 pagesComplete 11th - Maths (JEE 2025)mohdamaankhan74No ratings yet
- Software Engineering: Topics: 1) Uml and Use-Case Diagram 2) Reverse Engineering 3) Rational RoseDocument12 pagesSoftware Engineering: Topics: 1) Uml and Use-Case Diagram 2) Reverse Engineering 3) Rational RoseM khawarNo ratings yet
- Muncipal Solid Waste Management Using Landfills in Hyderabad City IJERTV4IS020842Document8 pagesMuncipal Solid Waste Management Using Landfills in Hyderabad City IJERTV4IS020842Sonali DesaiNo ratings yet
- Unit II - NanoChemistry CY3151 R21Document24 pagesUnit II - NanoChemistry CY3151 R21A/E5LOGESH AKRNo ratings yet
- Data Science Math SkillsDocument1 pageData Science Math SkillsShenghua NiNo ratings yet
- Ieee Neural Network Based Vehicle Number Plate Recognition System Icpedc47771.2019.9036497Document3 pagesIeee Neural Network Based Vehicle Number Plate Recognition System Icpedc47771.2019.9036497Edikan AkpanNo ratings yet
- Machine Learning Handwritten NotesDocument98 pagesMachine Learning Handwritten NotesTatiana ParáNo ratings yet
- Supervised Learning AlgorithmsDocument224 pagesSupervised Learning AlgorithmsBijal VazaNo ratings yet
- Clustering in Machine Learning - JavatpointDocument10 pagesClustering in Machine Learning - Javatpointmangotwin22No ratings yet
- Experiment 5 Design of Naca 4 Digit AerofoilDocument4 pagesExperiment 5 Design of Naca 4 Digit AerofoilDhana JayanNo ratings yet
- Data Warehousing & MiningDocument154 pagesData Warehousing & MiningVenkatesan RNo ratings yet
- Information Visualization: Dr. Parvathi.R VIT University, ChennaiDocument73 pagesInformation Visualization: Dr. Parvathi.R VIT University, ChennaisaRIKANo ratings yet
- Test - Series - 2 - Complex - Analysis - K2R - .PDF Filename UTF-8''Test Series - 2, Complex Analysis K2RDocument3 pagesTest - Series - 2 - Complex - Analysis - K2R - .PDF Filename UTF-8''Test Series - 2, Complex Analysis K2RMawia MmaNo ratings yet
- Calculus Question BankDocument83 pagesCalculus Question BankchitraNo ratings yet
- Quadratic Equation: 1 x1 4 X 2 4 X 3 1 X 4 1 30Document3 pagesQuadratic Equation: 1 x1 4 X 2 4 X 3 1 X 4 1 30Mohini DeviNo ratings yet
- Theory of Computation: Computer ScienceDocument134 pagesTheory of Computation: Computer ScienceBijay NagNo ratings yet
- CSIR NET Mathematical Sciences Official Paper (Held On 30 Nov 2020 Shift 2) (English)Document143 pagesCSIR NET Mathematical Sciences Official Paper (Held On 30 Nov 2020 Shift 2) (English)Tushar singhNo ratings yet
- StatisticsDocument41 pagesStatisticsSiddharth DasNo ratings yet
- Mathematics Today Feb 2025Document85 pagesMathematics Today Feb 2025adventistprayerministryNo ratings yet
- 4 Exploratory Data Analysis.Document1 page4 Exploratory Data Analysis.Shubham TagalpallewarNo ratings yet
- JNTUA Linear Algebra and Calculus Notes - R20Document213 pagesJNTUA Linear Algebra and Calculus Notes - R20Surya0% (1)
- Dependency Parsing: Pawan GoyalDocument38 pagesDependency Parsing: Pawan GoyalAmar KaswanNo ratings yet
- Statistics TechNeoDocument226 pagesStatistics TechNeoShrirang ZendNo ratings yet
- Operation Research Notes by Sachin Sir Sachin Education HubDocument45 pagesOperation Research Notes by Sachin Sir Sachin Education HubYashfeen FalakNo ratings yet
- CS365 Optimization Techniques Module4Document30 pagesCS365 Optimization Techniques Module4Pes2010 2No ratings yet
- Mining Comlex Types of DataDocument19 pagesMining Comlex Types of DataxyzkingNo ratings yet
- STATISTICAL METHODS Units-345notes BTech S.srinivasa RaoDocument78 pagesSTATISTICAL METHODS Units-345notes BTech S.srinivasa RaononeNo ratings yet
- 6 1 Mining Complex DataDocument69 pages6 1 Mining Complex DatasujiamarnathNo ratings yet
- GATE 2022 - Computer Science - Information TechnologyDocument2 pagesGATE 2022 - Computer Science - Information TechnologySumanNo ratings yet
- Digital Image ProcessingDocument38 pagesDigital Image ProcessingKiran GowdaNo ratings yet
- DIP Lecture - 02Document33 pagesDIP Lecture - 02sajjadhassa389No ratings yet
- Neighbour of A PixelDocument26 pagesNeighbour of A Pixelmukilan1978No ratings yet
- Digital Image Processing: Relationships Between PixelsDocument26 pagesDigital Image Processing: Relationships Between PixelsMarium IshaqNo ratings yet
- Relationships Between PixelsssDocument25 pagesRelationships Between Pixelsssnarasimhan kumaraveluNo ratings yet
- RateDocument51 pagesRatemukesh kumarNo ratings yet
- The Spirit of IntimidationDocument9 pagesThe Spirit of IntimidationCity Point ChurchNo ratings yet
- Powermax ProfileDocument109 pagesPowermax ProfileAnamta KhanNo ratings yet
- CE175-5C-Introduction and Course OutputDocument12 pagesCE175-5C-Introduction and Course OutputErza LeeNo ratings yet
- Gate Solved Paper - Me: General AptitudeDocument28 pagesGate Solved Paper - Me: General AptitudeVitul RajNo ratings yet
- Number Theory Chapter OneDocument8 pagesNumber Theory Chapter OneCiara LadromaNo ratings yet
- 11 English - Childhood - NotesDocument5 pages11 English - Childhood - NotesLakhyajit Das71% (7)
- Resistance To Motion and Battery Terminology - 221017 - 071750Document72 pagesResistance To Motion and Battery Terminology - 221017 - 071750shashanknaik109No ratings yet
- Midterms: NCM 105: Nutrition and Diet TherapyDocument32 pagesMidterms: NCM 105: Nutrition and Diet TherapyJohn Ford VisoriaNo ratings yet
- Cummins PCC 1302 Controller: View All Products in DG Set Control PanelDocument1 pageCummins PCC 1302 Controller: View All Products in DG Set Control PanelPpanNo ratings yet
- Aeroshell Grease 7Document2 pagesAeroshell Grease 7Younggi ChoiNo ratings yet
- Cost of Driving From Alabama To FloridaDocument1 pageCost of Driving From Alabama To Floridahpgdyb56vnNo ratings yet
- What Is Globalization AnywayDocument2 pagesWhat Is Globalization AnywayCamille Grande100% (3)
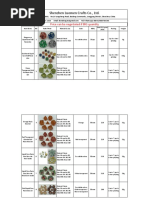
- Resin Dice CatalogDocument8 pagesResin Dice CatalogMO OrbsNo ratings yet
- Sexual Etiquettes in IslamDocument18 pagesSexual Etiquettes in IslamObaidur Rahman Ambia100% (1)
- Manual Asus m2vDocument118 pagesManual Asus m2vdanielveigaNo ratings yet
- CYW954907AEVAL1F Evaluation Kit User Guide PDFDocument67 pagesCYW954907AEVAL1F Evaluation Kit User Guide PDFRamon Jaramillo MartinezNo ratings yet
- Biochemistry Practical 2Document4 pagesBiochemistry Practical 2Tennidox0% (3)
- Sailor Moon Sailor Moon-EngDocument15 pagesSailor Moon Sailor Moon-EngFlorencia ColmaNo ratings yet
- Tide Tool 7.0 Manual V1.1Document38 pagesTide Tool 7.0 Manual V1.1Lito RomerozNo ratings yet
- Comparison of LMS and Neural NetworkDocument42 pagesComparison of LMS and Neural NetworkarundhupamNo ratings yet
- ODB - Math (Geometry)Document4 pagesODB - Math (Geometry)Jerric CristobalNo ratings yet
- N5531EDocument2 pagesN5531Eimtiaz1113No ratings yet
- Crown SpecsDocument16 pagesCrown SpecsGonçalo Filipe SousaNo ratings yet
- 9 TH CANTONAL ENGLISH LANGUAGE COMPETITION Primary SchoolsDocument12 pages9 TH CANTONAL ENGLISH LANGUAGE COMPETITION Primary SchoolsBelkisa Kobic0% (1)
- ASM_35826Document2 pagesASM_35826aadhyaaa.fmlNo ratings yet
- Biomass Power PlantDocument4 pagesBiomass Power PlantAldi ErzanuariNo ratings yet
- Calibracion Doble ResorteDocument60 pagesCalibracion Doble ResorteHector Jamaica100% (6)
- NDT Films Guide-201510 PDFDocument1 pageNDT Films Guide-201510 PDFjar_2No ratings yet