APE370: Microprocessor, Micro-Controller and Computer Peripherals
APE370: Microprocessor, Micro-Controller and Computer Peripherals
Download as pptx, pdf, or txt
You might also like
- ARM Microcontrollers Programming for Embedded SystemsFrom EverandARM Microcontrollers Programming for Embedded SystemsRating: 5 out of 5 stars5/5 (1)
- T-444 e PDFDocument208 pagesT-444 e PDFCesar Bayes Ramos100% (10)
- BCS-o11 Solved Assignment 2022-2023: Q1. (Covers Block 1)Document40 pagesBCS-o11 Solved Assignment 2022-2023: Q1. (Covers Block 1)Anish kumar Das100% (1)
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxFrom EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxRating: 4 out of 5 stars4/5 (1)
- MIMAKI CJV30-60 Series Service Manual PDFDocument316 pagesMIMAKI CJV30-60 Series Service Manual PDFokeinfo100% (1)
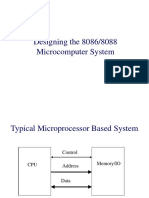
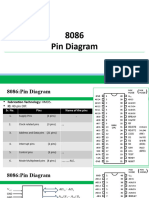
- Designing The 8086/8088 Microcomputer SystemDocument22 pagesDesigning The 8086/8088 Microcomputer SystemS RAVINo ratings yet
- P3-Suryani-Arsitektur Mikroprosessor 16 BitDocument69 pagesP3-Suryani-Arsitektur Mikroprosessor 16 BitdestiaraNo ratings yet
- Unit 4 Introduction To Microcontroller 8051aDocument105 pagesUnit 4 Introduction To Microcontroller 8051anitishNo ratings yet
- 8051 TutorialDocument116 pages8051 Tutorialadtest91No ratings yet
- Panashe Mushinyi H180524V SE Department Microprocessor and Embeded Systems Assignment 1 and 2Document6 pagesPanashe Mushinyi H180524V SE Department Microprocessor and Embeded Systems Assignment 1 and 2panasheNo ratings yet
- Introduction To 8086Document39 pagesIntroduction To 8086Jeevanantham GovindarajNo ratings yet
- 1-32-Bit Microprocessor - Intel 80386Document37 pages1-32-Bit Microprocessor - Intel 80386afzal_a67% (3)
- 1.a Guest Lecture On Mechatronics Mp&Mc-2019-20 UpdatedDocument57 pages1.a Guest Lecture On Mechatronics Mp&Mc-2019-20 Updatedrajendra kulkarniNo ratings yet
- Microcontroller and MicroprocessorDocument16 pagesMicrocontroller and MicroprocessorShujaAmjadNo ratings yet
- Block Diagrams of Microcontrollers.: PD0-PD5 (Serial Port) PE0-PE7 (Eight ADC Inputs) PC0-PC7 PB0-PB7 PA3-PA6 PA0-PA2 PA7Document4 pagesBlock Diagrams of Microcontrollers.: PD0-PD5 (Serial Port) PE0-PE7 (Eight ADC Inputs) PC0-PC7 PB0-PB7 PA3-PA6 PA0-PA2 PA7novo orderNo ratings yet
- 8051 TutorialDocument116 pages8051 TutorialMohammedtajuddin TajuddinNo ratings yet
- Home Microprocessor Computer Fundamentals Computer Network Java HTML CSSDocument19 pagesHome Microprocessor Computer Fundamentals Computer Network Java HTML CSSShravani SalunkeNo ratings yet
- Ch3 Advanced Hardware Fundamentals LectureDocument24 pagesCh3 Advanced Hardware Fundamentals Lectureapi-3838221100% (1)
- Automatic Fan Speed Control by Using Micro ControllerDocument46 pagesAutomatic Fan Speed Control by Using Micro ControllerbhuvanaNo ratings yet
- 8086 MicroprocessorDocument15 pages8086 Microprocessoraehab9812No ratings yet
- Architecture OF MC-1Document33 pagesArchitecture OF MC-1Unique ProNo ratings yet
- MP Mod 5Document24 pagesMP Mod 5Hari MuraliNo ratings yet
- 8086 ArchitectureDocument35 pages8086 Architecturemishamoamanuel574No ratings yet
- B35apo - Lecture07 Io 1Document122 pagesB35apo - Lecture07 Io 1dukeNo ratings yet
- 8086 Microprocessor: Vasuja Devi M Asst - Professor Ece Dept. KluniversityDocument129 pages8086 Microprocessor: Vasuja Devi M Asst - Professor Ece Dept. KluniversityalphabeeNo ratings yet
- 8086 Microprocessor Assembly Language Programming: Dr. Mohsen NASRIDocument56 pages8086 Microprocessor Assembly Language Programming: Dr. Mohsen NASRIsivaprasad484No ratings yet
- Hardware Architecture of 8086 and 8088 MicroprocessorsDocument9 pagesHardware Architecture of 8086 and 8088 MicroprocessorsGizmoSX100% (1)
- MPMC Unit-1Document27 pagesMPMC Unit-1downloadscribdpdfNo ratings yet
- U3 8086 MicroprocessorDocument10 pagesU3 8086 MicroprocessorNishant Singh ChauhanNo ratings yet
- Chapt (1,2,3)Document100 pagesChapt (1,2,3)Roman EmpireNo ratings yet
- Lecture-3 (Microprocessor 8086)Document31 pagesLecture-3 (Microprocessor 8086)ronak.karmakarNo ratings yet
- Ece 8085 MicroprocessorDocument26 pagesEce 8085 Microprocessorgourav VermaNo ratings yet
- Microprocessor: PentiumDocument45 pagesMicroprocessor: PentiumANSHY SINGHNo ratings yet
- Today's Content: Microprocessor Notes Lecture #1Document15 pagesToday's Content: Microprocessor Notes Lecture #1ayushNo ratings yet
- 8086 DetailDocument319 pages8086 Detailmalinigangadharan25No ratings yet
- Unit 2 Assembly Language Programming and Interfacing-1-130Document130 pagesUnit 2 Assembly Language Programming and Interfacing-1-130bittukamble0No ratings yet
- Hardware Detail of Intel 8088: Dr. Esam Al - Qaralleh CE Department Princess Sumaya University For TechnologyDocument34 pagesHardware Detail of Intel 8088: Dr. Esam Al - Qaralleh CE Department Princess Sumaya University For TechnologykundanambreNo ratings yet
- 8086 Architecture (Unit1 Part1)Document36 pages8086 Architecture (Unit1 Part1)Sumanth ReddysrNo ratings yet
- 8086 MicroprocessorDocument127 pages8086 MicroprocessorRajdeep BorgohainNo ratings yet
- Arm Processor ArchitectureDocument84 pagesArm Processor Architecturebhargava PrasadNo ratings yet
- SX 52 BDDocument58 pagesSX 52 BDedson_rcNo ratings yet
- 8086 Min Max ModesDocument31 pages8086 Min Max ModeschakrimvnNo ratings yet
- Lecture 3 & 4 8086 ArchitectureDocument43 pagesLecture 3 & 4 8086 Architecturebahauddin masumNo ratings yet
- Basic IO, Memory RW and Interrupt OperationsDocument18 pagesBasic IO, Memory RW and Interrupt OperationsBlackk SpydoNo ratings yet
- Features of 8086 MicroprocessorDocument6 pagesFeatures of 8086 MicroprocessoradityafirodaNo ratings yet
- WINSEM2023-24 CSI2006 ETH VL2023240501843 2024-01-17 Reference-Material-IDocument35 pagesWINSEM2023-24 CSI2006 ETH VL2023240501843 2024-01-17 Reference-Material-IRsv RajaNo ratings yet
- QUAN-Microprocessor ObjectiveDocument10 pagesQUAN-Microprocessor ObjectiveDebanjan PatraNo ratings yet
- Lecture #1: MicroprocessorsDocument63 pagesLecture #1: Microprocessorsعبدالله الاشموريNo ratings yet
- Structure of Computer SystemsDocument37 pagesStructure of Computer SystemsPop RuxiNo ratings yet
- 8086 MicroprocessorDocument125 pages8086 Microprocessorزيزو ZIZONo ratings yet
- Microcontroller 8051Document31 pagesMicrocontroller 8051Munazza FatmaNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Mega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3From EverandMega Drive Architecture: Architecture of Consoles: A Practical Analysis, #3No ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Neo Geo Architecture: Architecture of Consoles: A Practical Analysis, #23From EverandNeo Geo Architecture: Architecture of Consoles: A Practical Analysis, #23No ratings yet
- Game Boy Advance Architecture: Architecture of Consoles: A Practical Analysis, #7From EverandGame Boy Advance Architecture: Architecture of Consoles: A Practical Analysis, #7No ratings yet
- PlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12From EverandPlayStation 2 Architecture: Architecture of Consoles: A Practical Analysis, #12No ratings yet
- Master System Architecture: Architecture of Consoles: A Practical Analysis, #15From EverandMaster System Architecture: Architecture of Consoles: A Practical Analysis, #15Rating: 2 out of 5 stars2/5 (1)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- CompTIA A+ CertMike: Prepare. Practice. Pass the Test! Get Certified!: Core 1 Exam 220-1101From EverandCompTIA A+ CertMike: Prepare. Practice. Pass the Test! Get Certified!: Core 1 Exam 220-1101No ratings yet
- MTCMOS 8T SRAM Cell With Improved Stability and Reduced Power ConsumptionDocument6 pagesMTCMOS 8T SRAM Cell With Improved Stability and Reduced Power Consumptionseshu bradyNo ratings yet
- Objective Complete BookDocument20 pagesObjective Complete BookSohail YasirNo ratings yet
- Computer FundamentalsDocument98 pagesComputer FundamentalsMajoan LatupanNo ratings yet
- Bharath Fire Fighting RobotDocument43 pagesBharath Fire Fighting RobotDebojit DasNo ratings yet
- IT Short CourceDocument16 pagesIT Short CourceAdmin CvmrmptNo ratings yet
- Unit1 COADocument135 pagesUnit1 COAlostNo ratings yet
- Rockchip RK30xx TRM V2.0Document1,142 pagesRockchip RK30xx TRM V2.0Andrey LapshovNo ratings yet
- The System Unit: MotherboardDocument13 pagesThe System Unit: MotherboardStevenson CacNo ratings yet
- DSP ProcessorsDocument114 pagesDSP ProcessorsArunNo ratings yet
- Grade 9 Computer February TestDocument2 pagesGrade 9 Computer February TestShefat Phiri50% (2)
- Test of Computer HardwareDocument2 pagesTest of Computer HardwareGagan RajputNo ratings yet
- CS310 Foundations of Computer ScienceDocument30 pagesCS310 Foundations of Computer ScienceTran NguyenNo ratings yet
- Section 2 Introduction To Control SystemsDocument94 pagesSection 2 Introduction To Control SystemsAhmed FaragNo ratings yet
- SJ-20121212112849-013 NetNumen U31 R52 (V12.12.30) Alarm Handling Reference - 495279 PDFDocument50 pagesSJ-20121212112849-013 NetNumen U31 R52 (V12.12.30) Alarm Handling Reference - 495279 PDFK OuertaniNo ratings yet
- Computer - Quick Guide: Functionalities of A ComputerDocument85 pagesComputer - Quick Guide: Functionalities of A ComputerGeofreyNo ratings yet
- Technical Vocational Livelihood: Computer ProgrammingDocument19 pagesTechnical Vocational Livelihood: Computer ProgrammingRio VillotaNo ratings yet
- Big Data Deep Learning: Challenges and PerspectivesDocument12 pagesBig Data Deep Learning: Challenges and PerspectivesPraneeth Bobba0% (1)
- Fanuc AC Spindle Alarm CodesDocument5 pagesFanuc AC Spindle Alarm CodesControlledSolutions100% (1)
- Microprocessor Architecture 8085, 8086 & OtherDocument289 pagesMicroprocessor Architecture 8085, 8086 & OtherAshraf Ul IslamNo ratings yet
- Q2 2020 Fundamental IT Engineer Examination (Morning)Document29 pagesQ2 2020 Fundamental IT Engineer Examination (Morning)Pham Tien ThanhNo ratings yet
- s3c2450 Datasheet 200901Document2 pagess3c2450 Datasheet 200901jerometim33No ratings yet
- Cy91520series32 Bitfr81smicrocontrollerDocument281 pagesCy91520series32 Bitfr81smicrocontrollerusertestNo ratings yet
- Computer Science Solved MCQsDocument7 pagesComputer Science Solved MCQsNasir75% (4)
- 8086 ManualDocument45 pages8086 ManualGarima SinghalNo ratings yet
- Jaypee University of Engineering and Technology: Tutorial-1Document1 pageJaypee University of Engineering and Technology: Tutorial-1Gaurav SaxenaNo ratings yet
- How and Where Computers Are UsedDocument4 pagesHow and Where Computers Are UsedRicher Zara MoranoNo ratings yet
- Vlsi Question BankDocument14 pagesVlsi Question BankGokila Vani50% (2)