SIFT
•Download as PPT, PDF•
8 likes•9,844 views

The document describes the Scale-invariant feature transform (SIFT) algorithm. It outlines the key steps: 1) constructing scale space by generating blurred images at different scales, 2) calculating difference of Gaussian images to find keypoints, 3) assigning orientations to keypoints, and 4) generating 128-element feature vectors for each keypoint to uniquely describe local image features in a way that is invariant to scale, rotation, and illumination changes. The SIFT algorithm allows for reliable object recognition and image stitching.
Report
Share



























SIFT
- 2. Outline Introduction to SIFT Overview of Algorithm Construction of Scale space DoG (Difference of Gaussian Images) Finding Keypoint Getting Rid of Bad Keypoint Assigning an orientation to keypoints Generate SIFT features
- 3. Introduction to SIFT Scale-invariant feature transform (or SIFT) is an algorithm in computer vision to detect and describe local features in images. This algorithm was published by David Lowe.
- 4. Types of invariance Illumination
- 5. Types of invariance Illumination Scale
- 6. Types of invariance Illumination Scale Rotation
- 7. Types of invariance Illumination Scale Rotation Full perspective
- 9. 1. Constructing Scale space In scale Space we take the image and generate progressively blurred out images, then resize the original image to half and generate blurred images. Images that are of same size but different scale are called octaves.
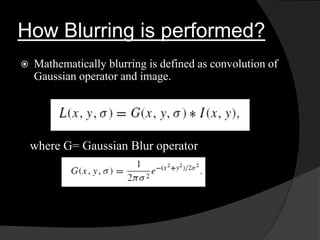
- 10. How Blurring is performed? Mathematically blurring is defined as convolution of Gaussian operator and image. where G= Gaussian Blur operator
- 11. L is a blurred image G is the Gaussian Blur operator I is an image x, y are the location coordinates σ is the “scale” parameter. The amount of blur. Greater the value, greater the blur. The * is the convolution operation in x and y. It applies Gaussian blur G onto the image I
- 12. 2. Difference of Gaussian(DoG)
- 13. LoG are obtained by taking second order derivative. DoG images are equivalent to Laplacian of Gaussian image. Moreover DoG are scale invariant. In other word when we do difference of gaussian images, it is multiplied with σ2 which is present in gaussian blur operator G.
- 14. 3. Finding Keypoint Finding keypoint is a two step process: 1. Locate maxima/minima in DoG images 2. Find subpixel maxima/minima
- 15. Locate maxima/minima In the image X is current pixel, while green circles are its neighbors, X is marked as Keypoint if it is greatest or east of all 26 neighboring pixels. First and last scale are not checked for keypoints as there are not enough neighbors to compare.
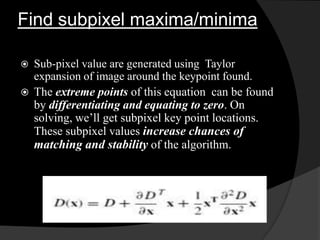
- 16. Find subpixel maxima/minima Sub-pixel value are generated using Taylor expansion of image around the keypoint found. The extreme points of this equation can be found by differentiating and equating to zero. On solving, we’ll get subpixel key point locations. These subpixel values increase chances of matching and stability of the algorithm.
- 17. 4. Eliminating bad keypoints 1. Removing Low Contrast features If magnitude of intensity at current pixel is less than certain value then it is rejected. 2. Removing edges For poorly defined peaks in the DoG function, the principal curvature across the edge would be much larger than the principal curvature along it To determine edges Hessian matrix is used.
- 18. Tr (H) = Dxx + Dyy Det(H) = DxxDyy - (Dxy )2 If the value of R is greater for a candidate keypoint, then that keypoint is poorly localized and hence rejected.
- 19. 5. Assigning Orientation Gradient direction and magnitude around keypoints are collected, and prominent orientations are assigned to keypoints. Calculations are done relative to this orientation, hence it ensure rotation invariance.
- 20. The magnitude and orientation is calculated for all pixels around the keypoint. Then, A histogram is created for this. So, orientation can split up one keypoint into multiple keypoints
- 21. 6. Generating SIFT Features Creating fingerprint for each keypoint, so that we can distinguish between different keypoints. A 16 x 16 window is taken around keypoint, and it is divided into 16 4 x 4 windows.
- 22. Generating SIFT Features Within each 4×4 window, gradient magnitudes and orientations are calculated. These orientations are put into an 8 bin histogram, depending on gradient directions.
- 23. Generating SIFT Features The value added to bin also depend upon distance from keypoint ,so gradients which are far are less in magnitude. This is achieved by using Gaussian weighting function.
- 25. This has to be repeated for all 16 4x4 regions so we will get total 16x8=128 numbers. These 128 numbers are normalized and resultant 128 numbers form feature vector which determine a keypoint uniquely.
- 26. Problem associated with feature vector 1. Rotation Dependence If we rotate the image all the gradient orientation will get change. So to avoid this keypoint’s rotation is subtracted from each gradient orientation. Hence each gradient orientation is relative to keypoint’s orientation. 2. Illumination Dependence If we threshold numbers that are big, we can achieve illumination independence. So, any number (of the 128) greater than 0.2 is changed to 0.2. This resultant feature vector is normalized again. And now we have an illumination independent feature vector.
- 27. Application Application of SIFT include object recognition, gesture recognition, image stitching, 3D modeling.
- 29. Image Stitching
- 30. References http://www.aishack.in/2010/05/sift-scale-invariant- feature-transform http://en.wikipedia.org/wiki/Scale-invariant feature transform yumeng-SIFTreport-5.18_bpt.pdf Paper on SIFT by Harri Auvinen, Tapio Lepp¨alampi, Joni Taipale and Maria Teplykh. David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, International Journal of Computer Vision, 2004