



2017 09-29 ndt loop closure
- 1. Loop Closure Detection Using the NDT Xudong Zhang 2017-9-29
- 2. • Background introduction • Technical Approach Explanation • Results Presentation • Future Expectation Outline
- 3. Background
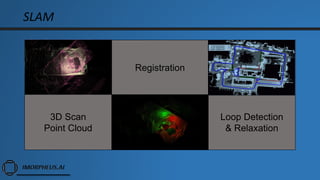
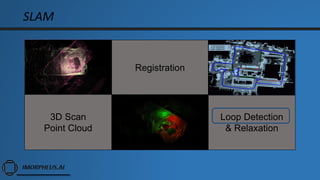
- 5. SLAM 3D Scan Point Cloud Registration Loop Detection & Relaxation
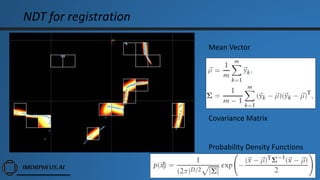
- 6. NDT for registration Mean Vector Covariance Matrix Probability Density Functions
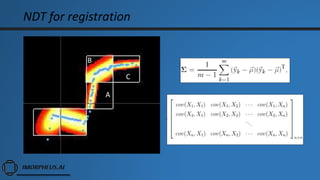
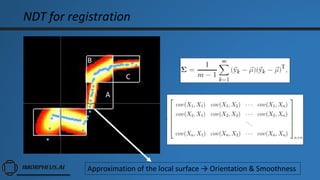
- 8. NDT for registration A B C Approximation of the local surface → Orientation & Smoothness
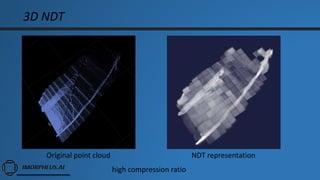
- 9. 3D NDT Original point cloud NDT representation high compression ratio
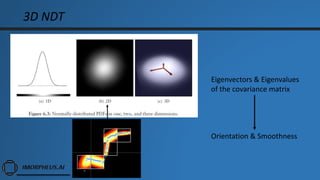
- 10. 3D NDT Orientation & Smoothness Eigenvectors & Eigenvalues of the covariance matrix
- 11. 3D NDT
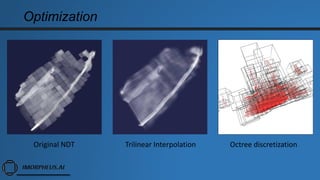
- 12. Optimization Trilinear InterpolationOriginal NDT Octree discretization
- 14. SLAM 3D Scan Point Cloud Registration Loop Detection & Relaxation
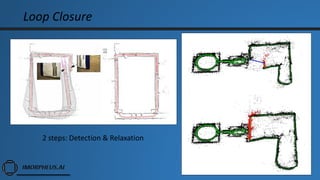
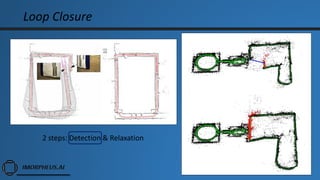
- 15. Loop Closure 2 steps: Detection & Relaxation
- 16. Loop Closure 2 steps: Detection & Relaxation
- 18. “Have I seen this before?” “Establishing the correspondence between past and present positions when closing a loop is one of the most challenging problems in robotic mapping.” Sebastian Thrun, 2002
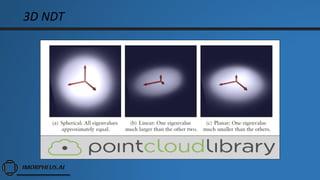
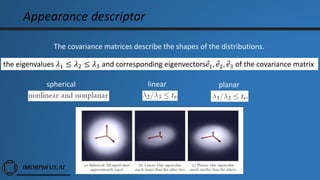
- 19. Appearance descriptor The covariance matrices describe the shapes of the distributions. the eigenvalues 𝜆1 ≤ 𝜆2 ≤ 𝜆3 and corresponding eigenvectors 𝑒1, 𝑒2, 𝑒3 of the covariance matrix spherical planarlinear
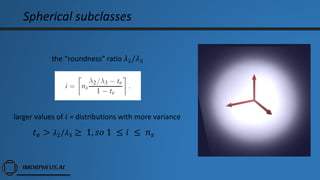
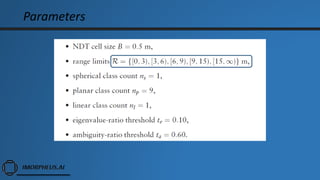
- 21. Spherical subclasses the “roundness” ratio 𝜆2/𝜆3 larger values of 𝑖 = distributions with more variance 𝑡 𝑒 > 𝜆2/𝜆3 ≥ 1, 𝑠𝑜 1 ≤ 𝑖 ≤ 𝑛 𝑠
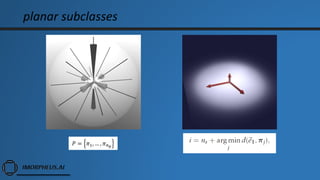
- 22. planar subclasses 𝑃 = 𝜋1, … , 𝜋 𝑛 𝑝
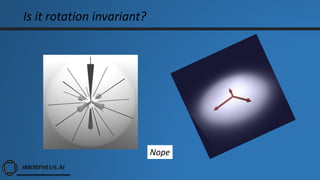
- 23. Is it rotation invariant? Nope
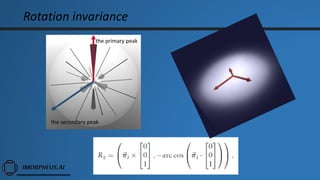
- 24. Rotation invariance the primary peak the secondary peak
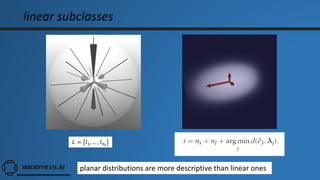
- 25. linear subclasses 𝐿 = 𝑙1, … , 𝑙 𝑛 𝑙 planar distributions are more descriptive than linear ones
- 27. Parameters
- 28. Results
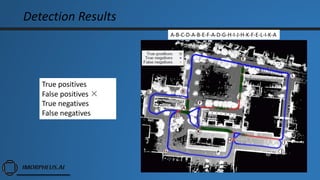
- 30. Detection Results True positives False positives × True negatives False negatives A-B-C-D-A-B-E-F-A-D-G-H-I-J-H-K-F-E-L-I-K-A
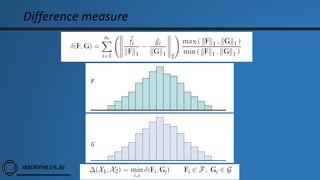
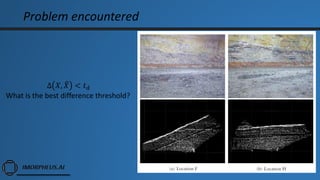
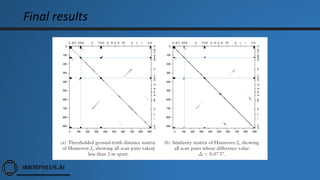
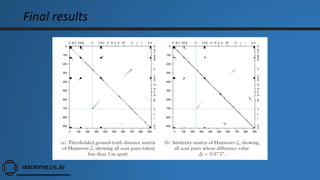
- 31. Problem encountered ∆ 𝑋, 𝑋 < 𝑡 𝑑 What is the best difference threshold?
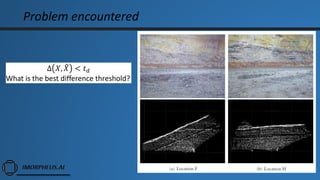
- 32. Problem encountered ∆ 𝑋, 𝑋 < 𝑡 𝑑 What is the best difference threshold?
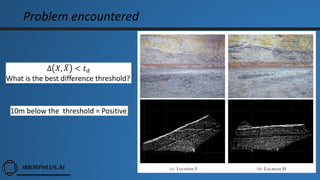
- 33. Problem encountered ∆ 𝑋, 𝑋 < 𝑡 𝑑 What is the best difference threshold? 10m below the threshold = Positive
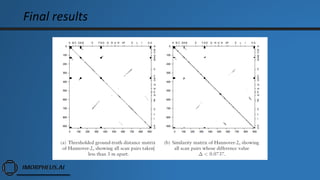
- 34. Final results
- 35. Final results
- 36. Final results
- 38. The author’s expectation 1. Different methods(automatic parameter) 2. Different data sets 3. Improving performance 4. Substituting a simple threshold with similarity matrix
- 39. Conclusion 1. A typical method of histogram based method 2. Main problems of loop closure detection