


















Haptic technology
- 1. HAPTIC TECHNOLOGY Submitted by: Anchika kumari B.Tech Vth Sem(CS)
- 2. INTRODUCTION Haptics’ is a technology that adds the sense of touch to virtual environments. Haptic technology refers to technology that interfaces the user with a virtual environment via the sense of touch by applying forces, vibrations, and/or motions to the user. When virtual object are touched, they seem real and tangible.
- 3. Haptic=Touch=Connection • Derived from Greek word “haptikos” means able to come in contact with” • HAPTIC :also known as force-feedback technology • Haptic technology has the ability to boost realism by the addition of a third sense called touch.
- 4. Generation of haptic • First generation: electromagnetic technologies produce a limited range of sensations • Second generation : touch-coordinate specific responses • Third generation : delivers both touch-coordinate specific responses and customizable haptic effects • Fourth generation : pressure sensitivity, i.e. how hard you press on a flat surface can affect the response
- 5. Basic System Configuration 4 3 2 4 3 2 1 1 End effector Hand Actuators Muscles Sensors Virtual object MachineHuman Computer hapticsSensors
- 6. Feedback • Haptics is implemented through different type of interactions with a haptic device communicating with the computer. • These interactions can be divided into two category: Tactile Feedback Force Feedback.
- 7. Types of Feedback Tactical feedback Force feedback • Refers to the sensations felt by the skin. • It allow users to feel things • Eg: temperature, vibrations etc. • It reproduces the directional forces that can result from solid boundaries. • Eg: weight of virtual objects.
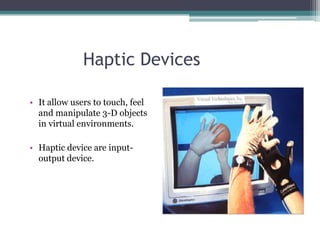
- 8. Haptic Devices • It allow users to touch, feel and manipulate 3-D objects in virtual environments. • Haptic device are input- output device.
- 9. 1.Phantom • providing a 3D touch to the virtual objects • provides 6 d.o.f • when the user move his finger, then he could really feel the shape and size of the virtual 3D object that has been already programmed. • It works monitoring the position of user fingertip or hand by optical encoder
- 10. 2.Cyber Grasp • The Cyber Grasp system fits over the user's entire hand like an exoskeleton and adds resistive force feedback to each finger • Allows 4 d.o.f for each finger • Adapted to different size of the fingers • Located on the back of the hand
- 11. Computer and video games: Disney Research Pittsburg has Shown off a technology called “Surround Haptics” that bring real life experience in video gaming and film watching
- 12. Medical & Military Stroke Patients • Patients interact with virtual worlds by feel. Army • Military Training in virtual environment.
- 13. Electronics Robotics Mobile devices- • Haptic technology is also widely used in teleoperation, or telerobotics. Tactile haptic feedback becoming common in cellular devices.
- 14. Future application • The Design Research Lab in Berlin, Germany has developed a haptic feedback glove designed specifically for blind users to improve texting capabilities. • The Lorm glove allows blind users to text by tapping various sensors, and to receive text via vibrations. • Text for blind
- 15. Touch to feel the virtual world • Interaction Research group at Microsoft Research Redmond developing through user touch and feel objects inside the virtual world • flat touch screen convey depth, weight, movement, and shape • moving a finger on the screen, the user can interact with on- screen 3-D objects and experience different force responses that correspond to the physical simulation.
- 16. Advantages Working time is reduced. Communication is centered through touch and the digital world can behave like the real world. Increase confidence in medical field. With haptic hardware and software designer can feel the result as if he/she were handling physical objects.
- 17. Disadvantages Higher cost. Large weigh & size From point of algorithm, output is not saturate. The precision of touch require a lots of advance design.
- 18. Conclusion • Touch plays a huge role in the way we perceive our surroundings and also how we interact with them. Haptics technologies have come a long way in bringing this technology into reality. • Currently limited to consumers. • Future generations of mobile devices and game console accessories will implement more haptic feedback. • Increasing applications of haptics the cost of the haptic devices will drop in future. • This technology brings us one step closer to virtual world.
- 19. References • https://haptics.lcsr.jhu.edu/Research/Tissue_M odeling_and_Simulation • http://www.mpb- technology/dof/application.html • http://www.informit.com • http://sciencedaily.com • http://www.electronic.howstuffworks.com • http://wikipedia.com